
基于联合控制仿真的主动式横向稳定杆控制策略研究
2024-02-03 04:55丁义兰
技术与市场 2024年1期
丁义兰
长安马自达汽车有限公司,江苏 南京 210094
0 引言
相较于其他车辆,越野车质心高、尺寸大、装载质量重,最易发生侧倾,甚至诱发侧翻。为了解决该问题,国内外学者进行了很多研究,其中黄康 等[1]、赵树恩 等[2]、张瑞栋[3]研究了主动横向稳定杆对车辆的防侧倾技术,王国丽 等[4]、孟爱红 等[5]以及刘少军 等[6]研究了主动悬架对车辆侧翻性能的影响,并进行了仿真分析,但对于横向稳定杆对车辆侧倾甚至侧翻性能的影响,鲜有人研究。
横向稳定杆是悬架中的一个部件,在车辆转弯时,横向稳定杆杆体发生扭转,杆身变形产生的弹力就会阻止车轮抬起,预防侧倾,但实际应用中,杆身的变形有限,难以满足复杂多变的工况要求。
本文正是在原车辆横向稳定杆的基础上,设计了一款主动式横向稳定杆系统,它将原杆件从中间断开,在中间加装了一个激励器系统,并对该系统设置了4种控制策略,可以根据车况的要求,实时调节车辆所需的防侧倾力矩。为了验证该系统控制策略的有效性,先利用ADAMS建立整车刚柔耦合动力学模型,再利用MATLAB/Simulink的模块化功能,建立相应控制策略的控制模型,最后通过接口相连进行联合控制仿真,验证该系统对整车侧倾甚至侧翻的改善程度。
1 基于主动式横向稳定杆的整车刚柔耦合动力学模型的搭建
1.1 基于被动式整车刚柔耦合模型的建立
本文建模所需的越野车3D和详细参数,均为某合作厂家提供。根据提供的参数,利用转动副、固定副、衬套等,分别将该车的动力传动系统、前后悬架、前后被动式横向稳定杆、前后车轮、转向系统、车身与地面等部件,在ADAMS中逐一进行简化连接,其中忽略了与本研究无关的制动系。
另外,因本文主要研究对象为横向稳定杆,在实际应用中,杆件自身可以承受部分变形,故选用结构和力学响应性更高的柔性体更符合实际情况。本文利用HyperMesh软件,来算出横向稳定杆的固有频率和模态,并将其模态结果进行合成,获得其柔性化的模型,并将该模型导入到ADAMS软件中。最终,将各模块的简化模型和横向稳定杆柔性化模型进行关联,得到整车刚柔耦合动力学模型,如图1所示。

图1 整车刚柔耦合动力学模型
1.2 基于主动式整车刚柔耦合动力学模型的建立
以被动式整车刚柔耦合模型为基础,其余零件不变,只将原横向稳定杆件一分为二,并在中间设立一个变量力矩,该力矩是依靠MATLAB/Simulink中的输入来控制(接口相连),用于抵抗车身的侧倾,相当于激励器的作用(ADAMS简化模型)。
1.3 模型的验证
依据GB/T 6323.6—1994的要求进行实车稳态回转试验,获得的数据与仿真试验的数据进行对比,试验的质心轨迹和仿真获得的质心轨迹差距极小,近似于重合,且前后轴的侧偏值分别为0.78(°)/(m/s2)和0.82(°)/(m/s2),因此,可以确定该整车刚柔耦合模型准确度较高。
2 主动式横向稳定杆系统的控制策略研究
2.1 被动式横向稳定杆的参数计算
主动式横向稳定杆系统以原车型的被动式横向稳定杆为基础,不改变其安装位置和原杆件的刚度、直径、弯曲性状,只是将横向稳定杆从中间断开,加装激励器,故被动式横向稳定杆的相关参数可根据厂家提供的参数进行计算,其中,本文中被动式横向稳定杆的两端位移工作范围为(-40,40)mm。
通过以下的公式进行测算:
(1)
式中:φ1为车身侧倾角;f为稳定杆端点距离;ay为侧向加速度;a为刚度比(前后侧倾);Maf为激励器输出的总侧倾力矩;Ws为车辆的簧上质量;hs为车辆质心距侧倾中心的距离;kφf为前轮侧倾刚度;kφr为后轮侧倾刚度。
可计算出原杆件自身扭转变形能提供的侧倾角和侧向加速度如下。
φmax=3.81°,φmin=0.45°,ay min=0.05 g
(2)
式中:φmax为车身最大侧倾角;φmin为最小侧倾角;ay min为最小倾向加速度。
横向稳定杆通过自身的扭转变形,为整车提供一个抑制侧倾的力矩,但由计算可知,该杆件自身的最大侧倾角仅为3.81°,一旦超过该限值,杆体就会因发生塑性变形而失效。而本文研究的主动式横向稳定杆,其激励器会在整车侧倾角大于原杆件最小侧倾角0.45°时开始工作,根据所制定的控制策略判断系统此时所需的力矩,驱动电机,为整车系统提供一个新的抗侧倾力矩,有效防止车辆的侧翻,避免该杆件发生塑性变形。
激励器的组成如图2所示。

图2 激励器剖面图
2.2 主动式横向稳定杆系统控制策略的确定
控制策略是主动式横向稳定杆系统的核心,本文研究的主动式横向稳定杆系统除了包含原杆件和电机激励器,为了实现其控制策略,还设有控制单元ECU,此外还包含各种传感器,如力矩传感器、侧向加速度传感器及车身侧倾角传感器等。电控ECU基于来自侧向加速度传感器和车身侧倾角传感器的数值,来确定车身的侧倾状况,并根据侧倾状况计算所需的扭矩,以驱动主动式横向稳定杆系统,从而达到改善车辆的侧倾稳定性的目的。
为了更好地研究该系统,首先得确认车辆行驶时的实况,本文总结了3种常见行车工况:水平路面,车辆直线行驶;水平路面,车辆转弯;左右两边倾斜的路面,无转弯,因车辆左右车轮引起的倾斜。
依据以上3种工况,制定主动式横向稳定杆系统的控制原理(见图3)。

图3 主动式横向稳定杆系统的控制原理图
在正常行车中,确保所有传感器均在工作状态,为了实现有效的控制,结合上文所研究的原杆件的最大侧倾角、最小侧倾角和侧向加速度等相关参数,得到以下的控制策略。
1)若控制单元检测到的侧倾角φ小于0.45°,则判定为车辆无侧倾,直线行驶。此时调用的是第1种控制策略,即此时控制电机主动力矩为0,杆体左右2部分分离,悬架刚度降低,乘坐舒适性大大改善。
2)若控制单元检测到的侧倾角φ大于等于0.45°,ay大于等于0.05 g,则判定车辆转弯中。调用的控制策略如图4所示,即将侧向加速度和抗侧倾力矩作为输入量,通过ECU计算出理论侧倾角,并将理论侧倾角与传感器测得侧倾角的差值作为反馈,不断修正,直至该差值小于0.45°,固定电机的施加力矩M。
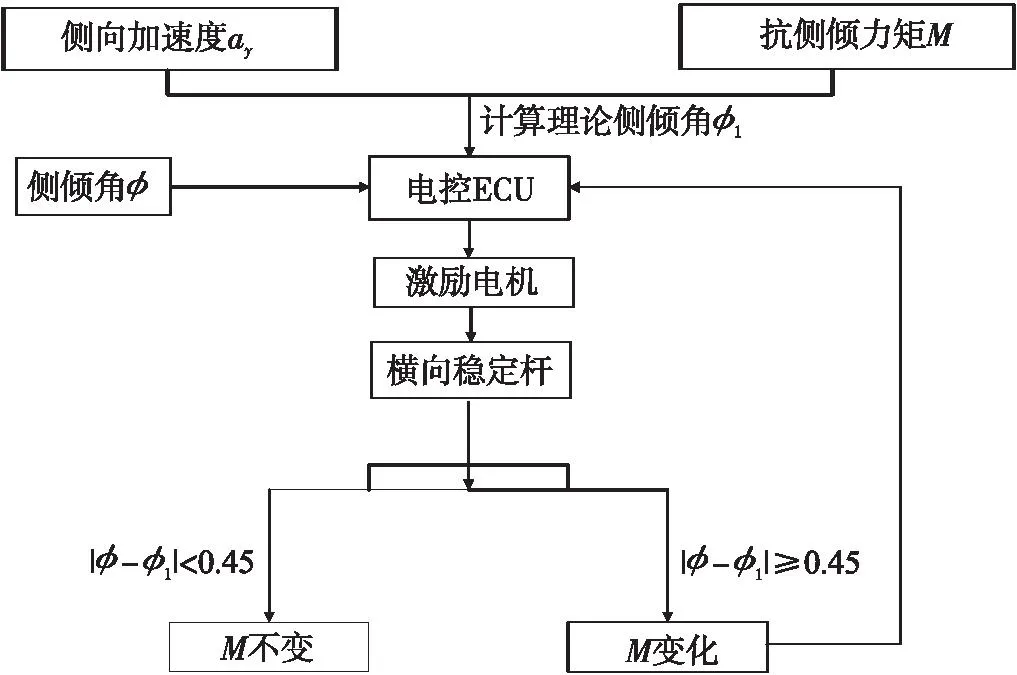
图4 第2种控制策略流程
3)若控制单元检测到的侧倾角φ大于等于3.81°,ay小于0.05 g,判定该车无转弯,行驶在左右存在倾斜的路面;或者由左右车轮引起的倾斜,此时已超过侧翻的阀值有侧翻危险,可调用第3种策略,即控制激励电机,将其输出的力矩固定在最大值,进行持续工作,直至车身回正。
4)若控制单元检测到的侧倾角大于0.45°,小于3.81°,ay小于0.05 g,判断该车辆处于侧倾状态,但未到侧翻的阀值,调用的控制策略如图5所示,即将侧向加速度和侧倾角作为输入量,通过ECU计算出系统此刻所需的力矩,并将车身的侧倾角作为反馈,不断修正施加系统的力矩,直至侧倾角小于0.45°为止。
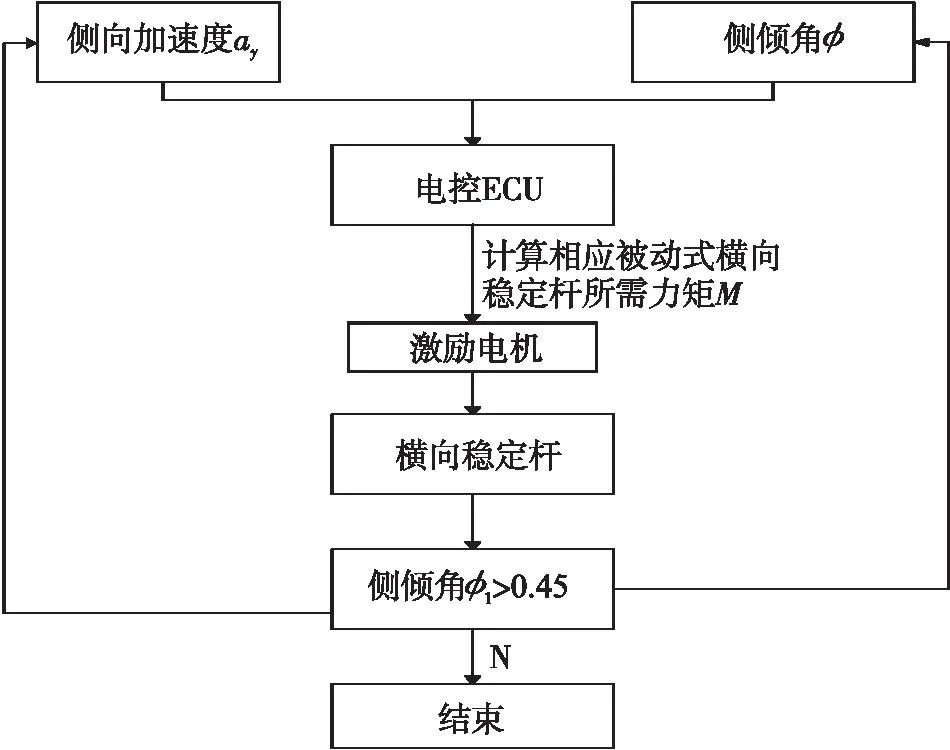
图5 第4种控制策略
3 基于联合控制仿真的主动式横向稳定杆控制策略的验证
3.1 建立基于主动式稳定杆件的数学模型
为了便于在MATLAB/Simulink中调用模块化功能来建立对应的控制策略,需要先建立整车侧倾的数学模型,确立与整车侧倾相关的3个参数之间的关系,即整车侧倾角、侧倾加速度、侧倾力矩三者之间的关系。
首先,假定车辆正在匀速转弯中,整车的受力示意图如图6所示。
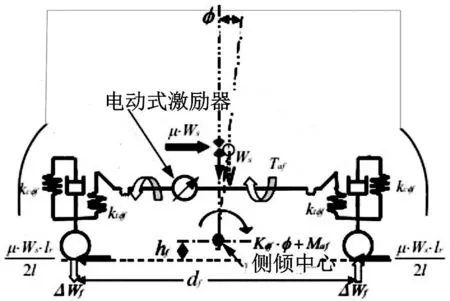
图6 车辆匀速圆周运动中转弯受力示意图
由整车动力学簧上质量的平衡方程,可推导出如下传递函数:
(3)
式中:Maf为激励器输出的总侧倾力矩;maf为电机产生的扭转力矩;b1/l1为纵臂、横向臂的位移率(横向稳定杆);α为刚度比(前后侧倾)。另外,试验测出:μ=ay,未知量只有φ、ay及Maf,其余数值均为合作方提供或者试验测出的已知量。
3.2 联合仿真模型的建立
针对上文制定的控制策略和建立的传递函数,运用ADAMS/MATLAB/Simulink联合仿真,验证控制策略的完整性,并根据结果不断进行修正和更新该系统的设计参数。
先通过ADAMS软件建立基于主动式横向稳定杆的整车动力学模型,同时依据前文所制定的控制策略和传递函数,在MATLAB/Simulink中建立了控制系统,并通过接口将2个软件系统中的模块联接起来,最后基于ADAMS和MATLAB/Simulink,建立了整车的联合控制仿真模型,来验证该系统控制策略是否可行。另外,车辆质心侧向加速度和侧倾角作为ADAMS中的输出量,它同时也是Simulink中的输入信号,而电机的主动转矩作为Simulink中的输出量,它也是ADAMS中的输入量。
3.3 主动式与被动式横向稳定杆对整车侧倾性仿真结果分析
基于上文建立的ADAMS和MATLAB/Simulink的整车模型,依据国标和美标的行业标准,分别选取与整车侧倾相关的2种试验进行验证,即稳态回转及鱼钩试验,并将其与被动式稳定杆的数据进行比较,来确认该系统制定的控制策略是否可行,并确认主动式横向稳定杆系统是否对车辆侧倾的改善有所帮助。
3.3.1 稳态回转试验
从图7~8可知,稳态回转试验中(根据国标稳态回转试验方法,在相同时间,2种条件下的速度相同),在低速阶段,安装主动式横向稳定杆系统的侧向加速度和侧倾角更加稳定,接近0值,但在高速阶段,该系统相对于安装被动式横向稳定杆的系统,无论是侧向加速度还是侧倾角,降幅明显,对车辆的整车侧倾性改善明显。

图7 稳态回转试验2种条件下侧向加速度曲线图 图8 稳态回转试验2种条件下侧倾角曲线图
3.3.2 鱼钩试验
如图9~10所示,鱼钩试验中(模拟车辆行驶一段行程偏航后,方向快速回正的过程,美标),在方向回正的过程中,安装主动式横向稳定杆系统的侧向加速度降幅明显,峰值较安装被动式横向稳定杆的系统,降低了50%,而侧倾角峰值降低了25%,可以得出本文研究的主动式横向稳定杆系统可以很显著降低车辆急速回正时的侧翻风险。
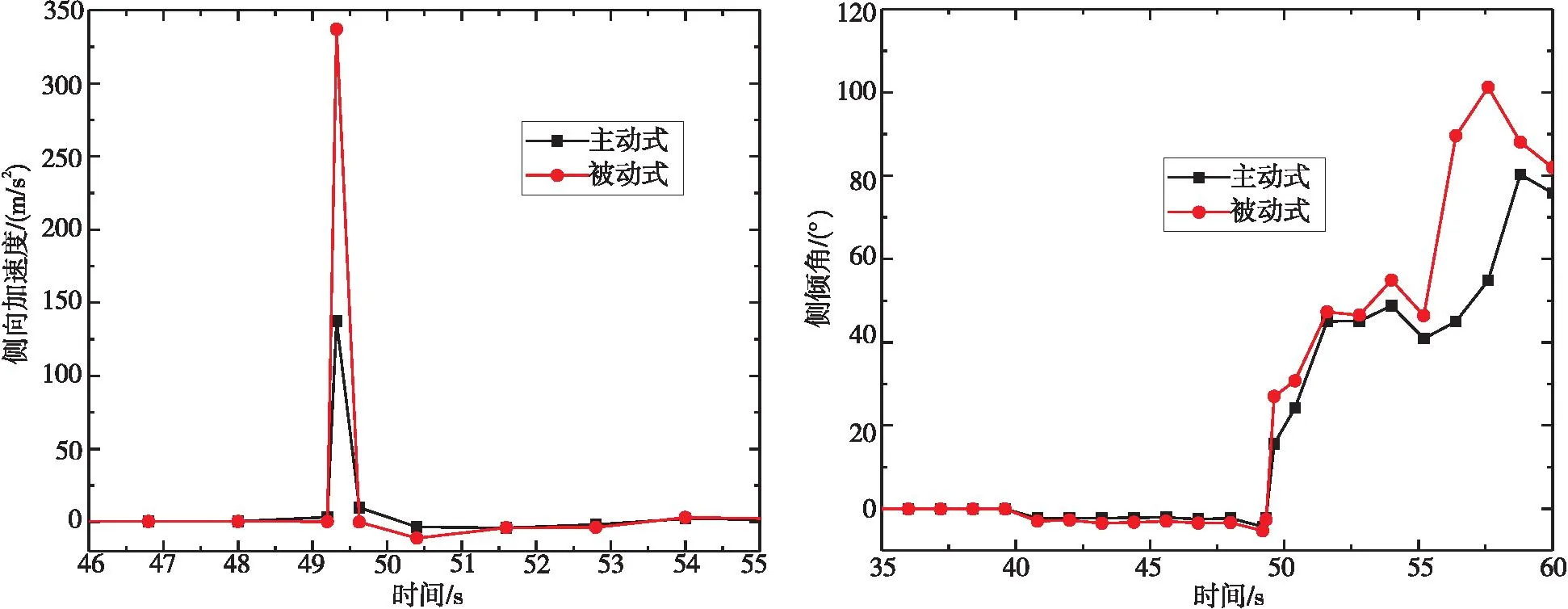
图9 鱼钩试验2种条件下侧向加速度曲线图 图10 鱼钩试验2种条件下侧倾角曲线图
4 结论
本文主要研究主动式横向稳定杆对某款越野车的侧倾的影响,先通过ADAMS中建立了基于该系统的整车刚柔耦合动力学模型,然后详述了该系统的4种控制策略,且在MATLAB/Simulink中建立相应的控制模型,最后进行联合控制仿真,得到以下结论。
1)制定的主动式横向稳定杆的控制策略是有效的。稳态回转试验和鱼钩试验中,随着时间的增加,该控制策略响应快、灵敏度高,能显著降低车身的角速度和侧向加速度。
2)主动式横向稳定杆系统相较于被动式稳定杆,对车身侧倾状态改善明显,有很大的研究空间。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
北京航空航天大学学报(2021年4期)2021-11-24
装备制造技术(2021年2期)2021-07-21
北京汽车(2019年5期)2019-11-07
模具制造(2019年7期)2019-09-25
光学精密工程(2016年3期)2016-11-07
通信电源技术(2016年1期)2016-04-16
西北工业大学学报(2015年1期)2016-01-19
噪声与振动控制(2015年4期)2015-01-01
汽车零部件(2014年5期)2014-11-11
