浅析EEAC法在电网安全稳定控制分析中的应用
2024-01-31 10:35芦飞
电气技术与经济 2024年1期
芦 飞
(南京南瑞继保工程技术有限公司)
0 引言
提高电网的稳定性可以通过加强网络结构的方式来实现,但是在某些情形下,这样增加巨额的投入并不切合实际;还有一个非常有用且投入不大的方法,是通过安全稳定控制措施来改善系统的稳定性,通过对几种不同类型的稳定性控制方法进行研究,得出了一些有益的结论[1-2]。
1 安全稳定控制系统的决策方式
在地区电力系统安全稳定的应急管理中,所有应急管理工作均需依据决策表进行。如果在当前的决策表格中,假定X代表该制度如何运作,Y代表事件集合,Z代表事件的控制措施,则按照决策表的不同情况,可以将决策划分为以下三类。
1.1 离线决策
该方法在国际和国内上都有普遍的应用。X、Y是无法确定的,为了建立一个判断表格,必须对操作模式及发生的情况进行预测。该方法离线计算量大,自适应差,而且需要较高的专业技术和操作经验,存在不匹配或控制精度低等情况[3]。
1.2 在线预决策
若按照目前的运作模式,即当X确定,只能预见某些事件,迅速作出决定。该方法的假设条件为在几分钟之内不会有较大的改变,从而可以解决条件不匹配的问题。日本CEPCO公司开发的晶闸管投切电容器(Thyristor Switched Capacitor,TSC)稳定控制系统和南京自动控制研究所开发的OPS-1型在线预测控制系统是该领域比较成熟的。该方法涉及到三个关键技术:基于故障扫描的小缺陷筛查、基于精细建模的大缺陷检测和基于并行算法的高效求解[4]。该方法是目前地区电网稳定控制技术的发展方向,也是一个热门课题。
1.3 实时决策
实时决策是最为理想的一种决策方式,也是安全稳定控制的发展方向,它彻底解决了操作条件与失效不匹配的问题。但这意味着它的技术较为复杂,这种决策防控手段只能在短期内发挥作用。需要利用相量测量单元(Phasor Measurement Unit,PMU)来对整个电力系统进行实时的监测,用高速通讯技术传送资料,良好的计算方法可以迅速、准确地对被干扰的体系进行预报和判定。三种控制策略的具体比较见下表。

表 三种控制策略对比表
2 EEAC原理
EEAC方法在多机系统中推广了等面积规则。它的本质是在一定条件下,对于给定的故障,将机组划分为两个互为补充的组,每一个组由单个等值机替代,并将其进一步等值成单机无穷大 (OMIB)系统[5]。利用等面积法则对系统的暂态稳定性进行计算。EEAC方法是目前仅有的一种被严格论证的方法。它的工作原理如图1所示。
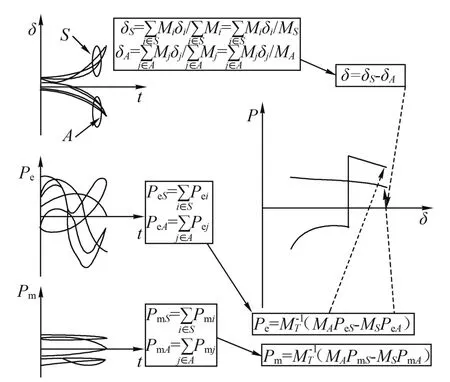
图1 EEAC法示意图
一个带有n个发电机的系统,对于第i个发电机,其动态方程为:
其中,Tji是第i个发电机的惯性时间常数;Pmi是电磁功率;Pei是机械功率。
令Mi=Tjiωi,则方程(1)可改写为:
在系统不稳定的条件下,该系统共有I=2n-2种不同的方式,将n台发电机划分成两个非空的互补组,即集合S和A,S、A同时满足以下关系:
对于某个特定的划分,将属于同一群的机组的动态方程相加,结果如下:
上述公式还包括所有n个角的变量,观测起来很不方便,在此将其转化成一个平面的方程组,以便观测。从n机系统到两机系统的映射过程如下:
由此,可把式(4)改写成二元微分方程:
要把EEAC应用于上述的两机体系,需要把这两机体系再映射为OMIB体系。令:
由公式(5)、(6)、(7)可得:
以上过程完成了多机系统到单机无穷大系统的映射,其部分惯性中心可表示为CPOI(n,l)。这种变换保留了多机系统的稳定特性,因而能够用来判断多机系统的稳定性,其证明如下:如果存在两个或更多的不稳定群,则每一个不稳定群的功率角包络间的间隔将趋向无穷大,这种间隔称为无边界功角(UAG)。要观察到UAG,就需要较长的积分时间,实际应用中,通常采用有界门槛值作为是否存在UAG的判断标准,当有功角度的余隙超过临界点,则视为不稳定。在一定的观测时间内,将n台机组按照功角从大到小的顺序来排列,从而产生n-1个不同的功角间隙。每个间隔将整个体系分成两种不同的补充类群,其中最前面的一类称为关键类,即集合S,其余的机组为剩余类,即集合A,因此有n-1种不同的划分方法。对于任何一种划分方式,通过公式(5)计算所得的δS必然大于S群功角的下包络线,δA必然小于A群功角的上包络线,因此δS-δA必然大于该方式下的功角间隙。两互补集合内发电机输出的电功率为:
在EEAC法中,发电机采用经典模型,即发电机直轴瞬态阻抗电势保持不变,因此有Ei(t)=Ei,Ej(t)=Ej,利用式(7),并令:
公式(9)可转化成如下公式:
EEAC法中所考虑的两群模式是理想的两群模式,群内各发电机同调,即互补集合内各发电机功角间隙在整个动态过程中保持恒定,所以各受扰轨迹相对于部分惯量中心的偏移角均为常数,由初始工况的潮流计算可得到:
把公式(12)代入到公式(11),可得:
按照从多机系统到两机系统的聚合公式,可得到两机系统的电磁功率表达式,如下:
再利用两机系统映射到OMIB系统的变换公式,可得:
其中,Pc、Pmax、v为等值OMIB系统的结构参数。
如果在动态过程中没有切除发电机,则映射到OMIB系统的机械输入功率为:
把式(16)、(18)代入到式(8)中,即为EEAC法映射到单机无穷大(OMIB)系统的动态方程。由于故障前后的网络结构不同,因此Pe也就不同。经过部分惯性中心CPOI(n,l)映射后,OMIB系统示意图如图2所示。
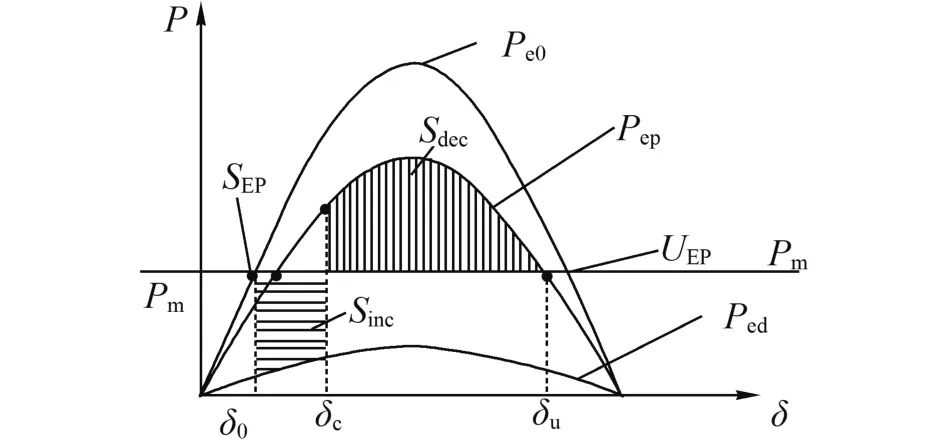
图2 映射后OMIB系统示意图
EEAC的核心是保留原有集成空间的整体结构,只将观测空间解耦为单个机械无穷大系统,同时保留原有机械动力学的稳定性,因此这一变换可用于判断系统的稳定性[6]。
3 EEAC法的优势
(1)计算速度快且精度高,能够提供稳定裕度
目前,国内大多基于电压、频率、n-1功率极限等对电网安全稳定性进行评估的方法虽然较为详细,但耗时较多,其中的各种因素对评估结果的影响较大。EEAC方法最大的优点是可以迅速对故障时的稳定余量和临界切除时间(CCT)进行准确求解,使调度人员可以更好地了解电网的状态,具有更强的针对性。
(2)可主导模式概念的应用
基于EEAC的控制方法,能够辨识各种瞬态功率不稳定模态,将各机组分成不同调的组别。这有助于正确建立电力系统主要网络架构,同时对PMU的布置进行最优化处理,实现了用最小的PMU来描述受多种干扰时的基本动力学特性。
(3)能够全面快速地设置扰动形式
对电力系统的实时稳定性进行了研究与探讨,EEAC法刚好可以迅速地给出全网各点跳闸的故障表,批量地解决了所有问题,求出了整个网络的稳定性余量和CCT值,这样可以迅速地对整个网络进行分析和评估,并形成对应的策略表。利用EEAC方法可以对多摆的稳定状态进行判断,运算耗时短,但在此过程中,还是使用了一个有效的数值来作为状态变量,并且评价的准确性取决于对同调群的辨识准确性。
4 结束语
本文首先阐述了安全稳定控制系统的基本模式和决策方法,在此基础上,对电网的安全性和稳定性进行了深入的研究;其次,深入研究了基于广域测量系统的安全性与稳定性的工作机制,并给出了基于扩展等面积算法的映射实现方案;最后,对广域测量系统与EEAC法在安全与稳定性监控中的优越性及未来发展趋势进行了论述。
猜你喜欢
电力自动化设备(2022年8期)2022-08-09
能源工程(2019年6期)2019-12-02
铁道通信信号(2019年2期)2019-03-26
电子测试(2017年12期)2017-12-18
大电机技术(2017年3期)2017-06-05
军事文摘(2016年16期)2016-09-13
西部广播电视(2015年17期)2016-01-18
智能建筑电气技术(2015年5期)2015-12-10
电源技术(2015年7期)2015-08-22
中国交通信息化(2015年1期)2015-06-05