基于离散傅里叶变换的光纤陀螺电路串扰自检测∗
2024-01-29 02:24唐荣芳何华光
电子器件 2023年6期
唐荣芳,何华光
(1.广西工业职业技术学院车辆工程学院,广西 南宁 530001;2.广西大学计算机与电子信息学院,广西 南宁 530004)
光纤陀螺具有全固态、高可靠、高精度等优势,在空间系统中得到了广泛应用。目前光纤陀螺主要分为两大类,一种是小型化光纤陀螺,精度在0.01 °/h~1.00 °/h,主要应用于卫星等航天器姿态稳定和轨道控制;另一种是光纤陀螺,精度在0.001 °/h,采样频率在500 Hz 之上,主要应用于卫星控制系统的微振动测量,从而保障卫星平台的稳定。本文研究对象是光纤陀螺。其电路中常出现串扰,使光纤陀螺高速采集下信号输出产生误差。基于此,电路串扰自检测研究成为现阶段电路研究重点内容之一,为了能够应对不同的干扰问题设计出全面且高效的检测方案,相关人员综合采取不同举措。
孟亚峰等[1]主要研究了非线性模拟电路,针对于该电路中常出现故障的识别准确性,提出利用改进烟花算法进行测试。通过构建非线性模拟电路的模型,对模拟电路中的爆炸因子、变异因子、选择策略等进行优化。其次,使用优化后的烟花算法进行测试,寻得最优解。该方法可有效提高电路故障的辨识度及诊断率。张圆等[2]利用小波变换进行噪声信号去除,并采用稀疏主成分分析提取缺陷信号特征,得到信号检测结果,该方法的抗干扰能力强、功耗低。胡鸿志等[3]针对现阶段模拟电路故障检测精准度较低的问题,提出了利用布谷鸟算法对GRNN 进行优化,实现电路故障检测。该方法具有迭代次数少的优势。
由于上述所提方法检测电路存在准确率低、耗时长的问题,因此,本文提出了基于离散傅里叶变换的光纤陀螺电路串扰自检测方法。通过陀螺检测闭环电路,建立串扰电路变化模型,结合傅里叶转变原理,对得到的串扰检测分析,保障了自检测结果的精准度,并通过同一实验环境下进行的实验验证了所提方法的有效性。
1 光纤陀螺电路串扰分析
光纤陀螺探测器将光信号转变为电信号,经过前置放大器放大后,进入FPGA 芯片处理后输出驱动信号,经过驱动电路处理后完成探测器电信号输出,其结构图如图1 所示。探测器输出的电信号为微伏量级,驱动电路的信号为伏量级,且在光纤陀螺的结构中尺寸受到限制,导致这两者信号之间距离较近,使得电信号输出易受到驱动电路信号串扰,时域输出如图2 所示。
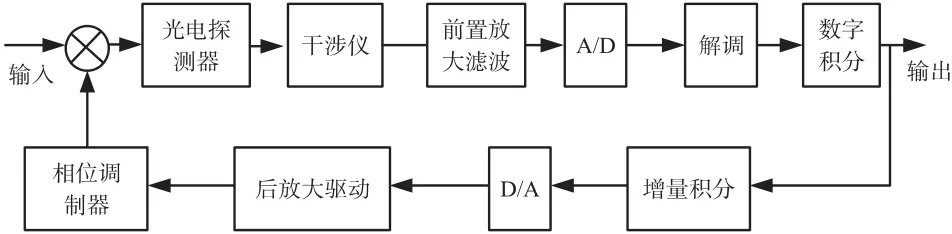
图1 光纤陀螺结构图

图2 电路串扰时域输出
以自主确定输出信号与驱动电路信号间的相位差,为误差标准。利用互容互感的特性,分析串扰信号变化规律特征,利用离散傅里叶变换,结合这种特征解析信号实现串扰信号的检测。
2 光纤陀螺串扰信号相位差计算
光纤陀螺[4]检测中包括开环检测和闭环检测。所不同的是在光路和检测电路中新增一个回路,以此实现相位信息反馈目的。反馈主要方法是将光纤陀螺解调出的相移信号作为一种偏差信号进行积分,并利用新增回路上的Y 波导构建相位差[5]函数,表示为ΔφF,作为反馈向量表示光纤陀螺转动产生的相移,符号为负,通过光纤陀螺相移信号使得ΔφL=Δφ+ΔφF,具体检测方法是将后续得到的相移信号作为误差标准,不断对获取到的阶梯波进行反馈,确保ΔφL的取值范围为零左右。
通过光纤陀螺干涉得到的信号表示为:
由式(1)可知,电路强度ΔI(t)和Δφ间存在正弦函数[6]关系,正弦函数与余弦函数间的差异性主要为:光纤陀螺仪能够检测出的电路方波正半与负半周期差值ΔI(t),据此得到检测所需的相移Δφ,当Δφ结果偏小时,ΔI(t)和Δφ为线性关系,可大幅度提高检测的灵敏度和线性程度,经光纤陀螺调制的电路变化响应图如图3 所示。

图3 光纤陀螺响应波形
通过光纤陀螺调制相位生成的反馈相移函数ΔφF,为降低高精度光纤检测中串扰输出信号的非线性[7]误差及解决数值统计范围大的问题,令ΔφF=-Δφ。具体操作方法为将新生成的相移函数看作标准误差,采用不断累积方式得到反馈阶梯向量,以图4 为例,伴随电路方波信号递增,反馈Y 波导于检测中。

图4 光纤陀螺阶梯波形
若将图4 中各阶梯波的持续时间使用渡越时长τ表示,可得到任意时间段t的电压[8]V(t),即:
式中:N代表时间t内的阶梯数量,VPP表示电路电压峰值,T为复位周期。
各阶梯内的电压幅度表示为:
将式(3)所得电压结果引入至Y 波导中,获得相向传输的两组串扰信号相位差为:
式中:Ktp代表光纤陀螺的调制系数。根据所得相位差值,结合式(2)和式(3)可得到检测最终反馈相位差为:
选择KtpVPP与2π 复位对应,当得到光纤陀螺检测角速率[9],依据阶梯高度变化弥补串扰造成的相位差,从而设定误差约束条件。
3 自检测模型构建
3.1 串扰变化规律
当信号在电路上运行工作时,邻近信号间会因电磁场的相互耦合作用,生成有干扰的噪声信号[10],也可看作电量由一条线耦合到其余线上。
在研究光纤陀螺电路串扰问题时,为了方便检测,首先要确定串扰源和被串扰对象。将串扰源看作侵害线,是由光纤陀螺检测电路自身的顺序电平发生改变,利用光纤陀螺检测电路耦合作用,对其他线路产生作用的这种信号源;将被串扰对象看作受害线,是由于受到其他线路的作用而造成自身逻辑顺序发生改变。
如图5 所示,当节点A 位置为驱动源,也称为串扰源,可得AB 间的线路为串扰侵害线,CD 间线路为受害线,即被串扰对象。在受害线上离侵害线最近的为源端,反之,较远的被称为远端。

图5 串扰电路的侵害与受害线路
基于图5 分析串扰规律性变化特征描述如下:
当两条线路之间电路节点间的距离较近时,互容产生的几率就会增加,可令线路信号从一根线路耦合至其他线路上,此时串扰电流会通过互容作用转移至受害线上。若只考虑一小段线路,将此段线路的长度表示为Δx,其长度互容于cm上,如图6 所示顺沿分布。

图6 电路耦合引发的串扰
在图6 中侵害线的指向代表线路的传播方向,利用电容Cm将侵害线的电流输入至受害线上,设Vf和Vb分别表示前后传输电压。可得到:
式中:Z0表示电路串扰特征,Vs表示串扰电压,由于电压为持续输出,即Vb=Vf,据此可得到:
由式(7)中可看出,侵害线的电流在受害线中形成串扰脉冲。当侵害线上的串扰由低变高时,将在受害线上生成一个正向脉冲,当侵害线上的串扰由高变低时,将在受害线上生成新的负脉冲。
两条线路间除了互容外,也会有互感,电路感性耦合引发的串扰如图7 所示。

图7 电路感性耦合引发的串扰
当侵害线上的电流i发生改变时,受害线上将形成串扰电压。此时电流存在连续性,前后两个方向上的串扰电流为等量电流。使用基尔霍夫电压定律得到的串扰线路的电压表示为:
式中:M代表互感,因Vb/Z0=-Vf/Z0以及is=Vs/Z0,因此,可得出后续串扰电压特征幅值[11]方程为:
针对前向串扰幅值Vf,存在Vf=-V。假设电路传输线长度为L,感性串扰VF表示为:
当侵害线上的串扰发生正跳变时,感性串扰VF会在受害线中生成前向和后向两个方向的正脉冲。若侵害线上的电流发生负脉冲时,将在受害线上生成的前向正伴随电流传播不断增强,而后向串扰电流频率不变,维持一段时间,以上为串扰发生后产生的信号特征,以该特征为基础,完成串扰检测。
3.2 基于离散傅里叶变换的串扰自检测节点模型
光纤陀螺通常使用多匝光纤来增强检测灵敏度,利用相干强电源来増强谐振生成的谐振效应进行串扰釆集。在光纤陀螺釆集电路串扰中,会面临强烈的色噪声,因此,在色噪声串扰下,光纤陀螺传感器以近场源方式釆集串扰信号,并分布在阵列空间的不同位置,图8 所示为光纤陀螺电路点分布模型。

图8 检测点分布模型
在图8 中,光纤陀螺微弱振动信号的分布式信源和阵元之间的值道向量有很强的时频耦合性,设光纤陀螺微弱振动信号采样时间序列为s1(t),s2(t),…,sL(t),振动传感器在阵列中心的空间分布距离满足:
式中:D代表光纤陀螺电路连续振动的频率半径,λ=c/f代表串扰波长。
假设光纤陀螺的振动传感器由N=2P个阵元构成,中心坐标为0,则第m个阵元获取到的光纤陀螺检测串扰电压信号特征的时间序列为:
式中:si(t)表示所需检测电路信号复包络,φmi表示光纤陀螺检测相移,nm(t)为串扰噪音,p为节点数量。
基于上述,以误差约束为条件,结合离散傅里叶变换构建原理,可对串扰信号进行解析,描述为:
式中:y(t)表示光纤陀螺检测串扰的虚部序列,a(t)代表电路的包络,θ(t)代表串扰相位。假设电路串扰变化不大,得到的光纤陀螺包络和相位表示为:
式中:a(t)和θ(t)代表串扰函数的输出关系,能够反映出串扰电路特征,从而完成电路串扰自检测。
4 实验与结果分析
4.1 实验环境设置
采用三轴多功能转台进行测试,调整转台位置,保证待测轴指向当地垂直方向。光纤陀螺敏感轴放置水平,使转台以0.001 °/s 的速度缓慢转动,以外框轴为自转轴绕顺时针和逆时针方向各旋转360°。在转台转动启动和停止平稳后进行数据采集,测得光纤陀螺的输出信号。图9 为三轴多功能转台测试现场。

图9 光纤陀螺电路串扰测试现场
以改进烟花算法(文献[1])及小波分析方法(文献[2])作为所提离散傅里叶变换检测方法的对比方法,在图9 所示的光纤陀螺电路串扰测试现场中完成测试,验证不同方法对电路串扰的检测效果。
4.2 实验结果分析
采用本文方法对光纤陀螺电路串扰结果进行测试,得到结果如图10 所示。在小转速下,串扰在输出信号中的表现更为明显,可使结果输出为0,此部分为死区。从图10 可知,本文方法可以有效地实现对光纤陀螺电路串扰的检测,输出符合实际结果的量级相当的死区。

图10 输出信号
为了验证所提的离散傅里叶变换检测方法对光纤陀螺电路串扰具有较好的抑制效果,进行了灵敏度实验。表1 为小波分析和光纤陀螺检测灵敏度实验结果。

表1 小波分析和光纤陀螺检测灵敏度对比
从表1 中可看出,针对同一检测电路的各种桥接和开路故障,所提的离散傅里叶变换检测方法的灵敏度远高于基于小波分析方法及改进烟花算法。由此可见,光纤陀螺检测可有效地检测出一些其他分析方法很难检测出的故障。可见,与其他方法相比,所提的离散傅里叶变换检测方法对电路串扰具有高的灵敏度。
表2 为串扰检测和定位结果。由表2 可看出,被定位的串扰数要低于被检测出的故障数,这主要是由于少数串扰对电路的影响较小。这些串扰对应的小波系数及改进演化系数在计算串扰时会大于阈值,因此可利用光纤陀螺进行电路串扰定位。

表2 串扰检测和定位结果
图11 为检测运行时间测试结果。从图11 中可看出,本文方法随着图像数量的不断增加,运行时长始终不超出30 min,小波分析方法最高时长达到70 min,改进烟花算法最高时长达到60 min。综上可知,所提的离散傅里叶变换检测方法能够节省大量提取时间,较文献方法的平均耗时节省35 min,具有显著优越性。再将两种方法的检测精度进行比较,如图12 所示。

图11 检测运行时间对比图

图12 曲线对比图
图12 所示为三种方法在多场景图像下电路串扰的精度结果。将三种方法设置为同种检测效率的前提下,数据显示小波分析方法和改进烟花算法的检测精度低于所提检测方法,很容易被其他因素所干扰。本文方法能够准确检测出电路串扰,也可有效地去除多场景电路下的噪声及其他因素干扰,所提的离散傅里叶变换检测方法检测精度最大值为97%,较文献方法检测精度高34%,能高效地完成串扰检测。
5 结论
电路串扰检测是一个较复杂的系统问题,因此在设计具体的检测方法时应首先分析各串扰因素的生成、串扰途径。在设计电路时使用预防以及解决方式,系统地解决串扰问题,并不断改进电路防护措施,从而提高电路工作系统的稳定性和可靠性。为了优化光纤陀螺电路串扰检测效果,本文提出了基于离散傅里叶变换的光纤陀螺电路串扰自检测研究。在光纤陀螺电路串扰分析的基础上进行光纤陀螺检测。明确串扰变化规律,并利用离散傅里叶变换方法构建串扰自检测节点模型,实现光纤陀螺电路串扰自检测。通过实验结果发现,设计方法对电路串扰进行了有效抑制和消除,获得了信噪比较高的电路串扰信号。在未来的研究中,接收到的电路串扰信号可以经过软件滤波的方式进行处理,从而进一步提高电路检测工作效率。
猜你喜欢
家庭影院技术(2020年1期)2020-06-24
小学生学习指导(低年级)(2019年10期)2019-10-16
数学物理学报(2019年2期)2019-05-10
家庭影院技术(2019年4期)2019-04-17
学生天地(2019年6期)2019-03-07
军事文摘(2018年24期)2018-12-26
测控技术(2018年7期)2018-12-09
家庭影院技术(2018年9期)2018-11-02
快乐语文(2018年36期)2018-03-12
电子制作(2017年13期)2017-12-15