
自主式水下机器人滑模容错自动化控制方法
2024-01-27 02:59郑心勤陈达源黄训辉
自动化与仪表 2024年1期
郑心勤,陈达源,黄训辉,蒋 川
(国家电投集团徐闻风力发电有限公司,湛江 524022)
智能机械和自动化技术的不断发展使智能机器人的应用范围逐渐扩大,在工业生产、电力巡检以及地质勘测等方面都实现了高效应用。其中,自主式水下机器人作为目前应用频率较高的一款,其在各种水体环境下进行监测工作,操作简单实用、实时执行能力很强、机动性较好,可完成多项水下作业任务。但由于水下环境较为复杂,具有不可预测性、不确定性,机器人一旦发生故障,其机身内部就会发生损坏导致无法回收,损失较大。为提高机器人在水下的工作质量和安全性,进行自动化控制技术的研究。
文献[1]提出一种基于隐式离散化超螺旋的水下机器人自适应控制算法,按照机器人的运动姿态参数建立动力数学模型,设定在每一个采样周期内,机器人运动载体的稳定形态参数,将该值作为控制参照,采用隐式离散化算法查找排除影响控制性能的参数,通过模型调整完成自适应控制,这种控制方法的局限性较强,在一些工况较为复杂的环境下很难实现高效控制。文献[2]采用一种基于串-并联PID 的水下机器人控制方法,采集机器人的运动参数信息,建立PID 控制模型将初始信息进行代入,求得机器人在不同的运行姿态下各个关节点的故障动态参数,按照串-并联控制规则并结合最小二乘法计算控制分量与机器人运行参数之间的线性关系,由此完成控制,该方法故障信号和控制执行信号之间的误差较大,影响控制结果。
综合上述问题,本文给出一种自主式水下机器人滑模容错自动化控制方法。容错控制是指无论在哪种工况环境下工作时,一旦机体出现故障反馈信号,自动进行工况转换并进行自适应调节,维持机组的稳定运行的技术。建立自主式水下机器人的空间运动方程,分析当机器人出现姿态动作时线性变化规律,得到会导致滑模变化的观测方程。后续进行自动化控制时,可将机器人的现场参数代入到该方程中,求得与滑模变化存在特征关联的分量大小,将其作为控制参照,大大提升控制精准度和效率。滑模容错自动化控制算法以机器人的故障变化为基础,一旦查找到相应故障点,及时提取该点的特征分量,将分量值作为滑模容错控制的初始输入,采用线性反馈控制规律自动提取与故障点相对应的控制分量。这种自动化控制方法的适应能力较强,算法容错性较高,控制效果好。
1 自主式水下机器人故障状态分析
机器人的滑模容错控制需要以故障为控制触发,当反馈器接收到机器人故障信号时,第一时间进行自动化控制调整。所以,控制参数和故障参数之间需要保证高精度的对应关系,控制分量需要以水下机器人的故障点参数为参考,通过分析二者之间线性关系分析机器人的故障状态,来求得最佳的控制参数,提高自动化控制精准度和效率。首先分析自主式水下机器人五自由度[3]空间方程,表示为
式中:Y、Y″分别表示5 个自由度的速度和位移矩阵;Ft表示推力矩阵[4];Fvis表示水动力矩阵。
基于上述机器人的空间方程,采用离散模型[5]建立机器人故障执行器的动力学方程为
式中:x(k)为k 时刻机器人的状态矢量;y(k)为输出状态矢量;u(k)为初始执行器的控制矢量[6];f(k)为故障矢量;A、B、E、C 分别为描述机器人状态的常数矩阵,A、B 为可控常数矩阵,E、C 为观测常数矩阵;ω(k)为不确定性因素矢量;v(k)为噪声参数;ω(k)、v(k)的初始值均为0。
为了有效估计水下机器人故障状态变化,将式(2)写作:
式中:x1、x2、x3表示故障状态的时间序列点矢量;y1、y2表示故障状态的空间序列点矢量;IΓΓ-q表示故障状态估计;Iq表示估计均值。通过该公式可知,x2(k+1)与y1(k)的均值相同,x3(k+1)与y2(k)的均值相同,从均值意义上来看,只需要对x1(k+1)进行故障估计,即可得到下一序列点的估计数值。
假设,rank(CE)与E3属于非奇异矩阵[7],定义:
式中:ρ(k)表示机器人可控常数矩阵估计值的计算偏差;λ(k)表示观测常数矩阵估计值的计算偏差;K(k)为卡尔曼滤波增益[10],计算公式为
式中:P(k)为协方差更新矩阵,计算公式为
通过上述公式计算求解,可将自主式水下机器人的离散故障状态q(k)表示为
通过该公式可得,当机器人的执行故障到达算法估计值时,此时滑模容错控制的输入量可按照下一时刻执行故障估计值进行执行,这样得到的故障分量值最为准确,进行控制的精准度最高,控制分量与故障分量之间较为一致。采用的卡尔曼滤波算法估计机器人状态变量所需时间更短,效率更高,当发现故障点时可第一时间提取到关键参数的变化,估计机器人的参数线性、时变等值,为后续滑模容错自动化控制提供了重要信息,大大提升控制效率和精准度,减少二次控制次数。
2 水下机器人滑模容错自动化控制
通过对自主式水下机器人故障状态进行分析,可以有效识别故障和异常状态,提高容错控制的可靠性。考虑到自主水下机器人的工作环境较为复杂,其运行状态会跟随水下环境发生明显变化,因此,控制算法需要考虑参数变化和干扰敏感性是非常有必要的。而滑模容错控制的目的是保证机器人在发生故障时也可以稳定运行,所以,需要以上述过程求得机器人故障特征为基础,给出一种根据故障参考的控制算法,通过对速度和轨迹矢量的偏差调节来实现有效自动化控制。
通过对故障状态分析可以为滑模容错自动化控制提供准确的故障信息,为此,将第1 小节中获取的机器人的离散故障状态信息输入下述公式中,获取机器人在故障状态下的方程表示为
式中:f 表示故障分量[11];X、X″分别表示正常和故障状态;U 表示控制期望差值[12];σ0表示滑模参数;ST表示T 周期下滑模面的参数。
ST决定了机器人滑模运动特性,控制器需要以一个任意点为驱动,控制其沿着滑模面直至滑向平衡点,由此完成控制,基于此,设定一个Lyapunov函数[13]:
要想保证机器人的稳定状态,需要满足:
式中:ε 表示可调节参数[14]。求得控制输出值为
若KT数值足够大,则可以很好地规范控制过程中出现的故障项和误差项,实现高容错性和鲁棒性的控制性能。在基于离散模型得到机器人的故障信息后,为了有效消除控制抖振,在滑模容错控制函数中加入双曲正切函数tan(σ0/φ),其中,φ 表示滑模面的切换厚度,计算公式为
3 性能测试
3.1 测试环境
为验证文中提出自主式水下机器人滑模容错自动化控制方法应用的有效性,以Matlab 环境作为仿真测试环境,以“Beaver”作为仿真测试平台,采用文中方法进行滑模容错控制。实验相关测试数据如表1 所示。

表1 实验涉及相关数据信息Tab.1 Relevant data information involved in the experiment
3.2 机器人故障辨识结果
在机器人滑模容错自动化控制的实际应用中,故障点信息作为其控制的重要参考项起到重要作用,针对故障辨识结果进行测试,得到所提方法辨识结果与实测值之间的对比曲线如图1 所示。
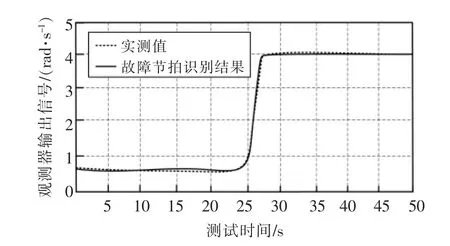
图1 机器人故障辨识对比曲线Fig.1 Comparison curve of robot fault identification
从图1 中可以看出,所提方法得到的故障输出结果与实测结果之间表达一致,信号走向大致相同,在第25 s 处发现故障,证明所提故障辨识结果精准度较高。
3.3 机器人滑模容错自动化控制结果
以存在故障的自主式水下机器人为实验对象,并将所提方法的控制结果与期望输出值进行对比,机器人期望输出结果与所提方法的控制结果如图2所示。

图2 机器人期望与实际输出结果Fig.2 Robot expectations and actual output results
从图2 中可以看出,若机器人未发生故障,那么其系统输出信号稳定性较强,不会出现过高或过低的峰值波动,整体走势趋近稳定、具有一定的规律性。而所提方法符合期望输出变化,整体走势稳定,输出信号幅值在-28 Hz~28 Hz 之间,各个频段之间的波动间距基本相同,没有超高频或超低频的信号。说明经过所提方法控制后,机器人故障波动得到了明显的改善,当故障发生后其第一时间捕捉到了故障点,并提取特征信息进行滑模容错控制,使其不受故障影响继续保持稳定运行。
4 结语
由于水下测试环境工况复杂、噪声干扰以及其他环境因素影响较大的问题,水下机器人控制工作进展困难,本文提出一种滑模容错自动化控制方法。预先建立机器人空间运动方程并进行分析,采用离散数学模型来提取机器人故障点的特征分量,得到的故障信息作为后续滑模容错控制的初始参照,在最大程度上提升了控制效果。控制器以机器人的任意一点为驱动,控制其沿着滑模面直至滑向平衡点,在过程中还考虑到了滑模各点线性关联问题,保证了稳定性和高容错能力。实验数据证明,所提方法控制性能表现较佳,可确保机器人的稳定输出。
猜你喜欢
初中生学习指导·提升版(2023年12期)2023-12-18
传感器世界(2023年5期)2023-08-03
中学生数理化·高一版(2021年11期)2021-09-05
当代陕西(2020年24期)2020-02-01
中国惯性技术学报(2019年6期)2019-03-04
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
自然资源情报(2017年4期)2017-11-26
现代防御技术(2016年1期)2016-06-01
新高考·高一物理(2016年1期)2016-03-05
