
重载双发纵列式无人直升机飞行控制系统设计
2024-01-27 02:58李小光顾天昊徐冠华
自动化与仪表 2024年1期
李 硕,李小光,顾天昊,徐冠华
(青岛大学 自动化学院,青岛 266071)
随着嵌入式微处理器、传感器、半导体等高新技术的发展,无人机发展也得到了科技的浸润和推进[1]。对具有广阔军事和民用前景的油动重载双发纵列式无人直升机进行研究与开发具有重要的现实意义。
纵列式直升机具备很多优势,其具有前后2 个转向相反的旋翼,双旋翼抵消了机身反扭矩,因而不存在尾桨,提高了直升机的悬停效率与运载能力,而且纵列式直升机机身相对紧凑,也可以允许较大重心偏移[2]。文献[3-4]设计的纵列式无人直升机都为小型电动无人机,采用电机作为动力装置,通过电子调速器可直接得到有效控制,相对于油动纵列式无人直升机转速控制容易很多,但是续航时间较短、载荷小。因其控制难度较大,研究成本较高,所以国内目前对于油动双发重载纵列式无人直升机研究较少,而油动重载双发纵列式无人直升机相比于普通电动式纵列式直升机而言有着载荷大、续航时间长、安全性能高等优点。因此,对于此机型的飞控系统深入了解是十分必要的。
本文主要从飞行控制原理、软硬件介绍、静态调试与飞行试验几个部分对重载双发纵列式无人直升机控制系统进行阐述,最后通过系留悬停试飞试验对本文设计的飞行控制系统进行验证。
1 重载双发纵列式无人直升机运动控制设计
1.1 重载双发纵列式无人直升机机身结构及参数
本文所设计的油动重载双发纵列式无人直升机采用ROTAX912is 航空发动机作为直升机动力驱动,该机型采用双发机构设计,2 台发动机输出转速同时作用于同一根传动轴上,使得输出功率能够得到有效叠加。具体三维模型如图1 所示。

图1 纵列式直升机CATIA 模型Fig.1 Longitudinal helicopter CATIA model
该油动重载双发纵列式无人直升机同时设计有一级减速箱、二级减速箱、传动轴作为动力传动系统,另外安装有8 个数字舵机,前后旋翼自动倾斜器处各安装3 个数字舵机,控制前后自动倾斜器实现总距变化、横向周期变距、纵向周期变距。2 台发动机油门拉杆处各安装1 个数字舵机,控制发动机的油门开度达到控制转速的目的。
文中所搭建的重载纵列式无人直升机总体参数如下:质量520 kg,最大起飞重量800 kg,机身长度4 m,机身高度1.5 m,桨盘半径2.4 m,旋翼半径2.1 m,桨叶弦长0.15 m,桨叶数6 片;发动机功率73.5 kW,发动机最大转速5800 r/min,一级减速箱减速比1∶1.355,二级减速箱减速比1∶1.524,发动机本身减速比1∶2.43。
1.2 重载双发纵列式无人直升机运动控制分析
纵列式双发无人直升机必须具备的飞行控制条件是有效控制无人机的3 个自由度(翻滚、俯仰、偏航)和高度。该纵列式无人直升机通过2 个油门舵机来控制发动机油门开度从而控制发动机转速和6 个旋翼舵机来控制直升机2 个自动倾斜器姿态,从而使得直升机能够产生垂直起降、横向、纵向、偏航运动。
垂直起降运动是通过同时增加或减少前、后旋翼总距来实现,如图2(a)所示;纵向运动控制是通过沿俯仰轴同等倾斜前后倾斜盘来实现,即通过前后旋翼的纵向周期变距来实现,如图2(b)所示;横向运动控制是通过沿横滚轴同等倾斜前后倾斜盘来实现,即通过前后旋翼的横向周期变距来实现,如图2(c)所示;偏航运动控制是通过前、后旋翼总距差动变化,并且进行俯仰动作补偿来实现,如图2(d)所示。
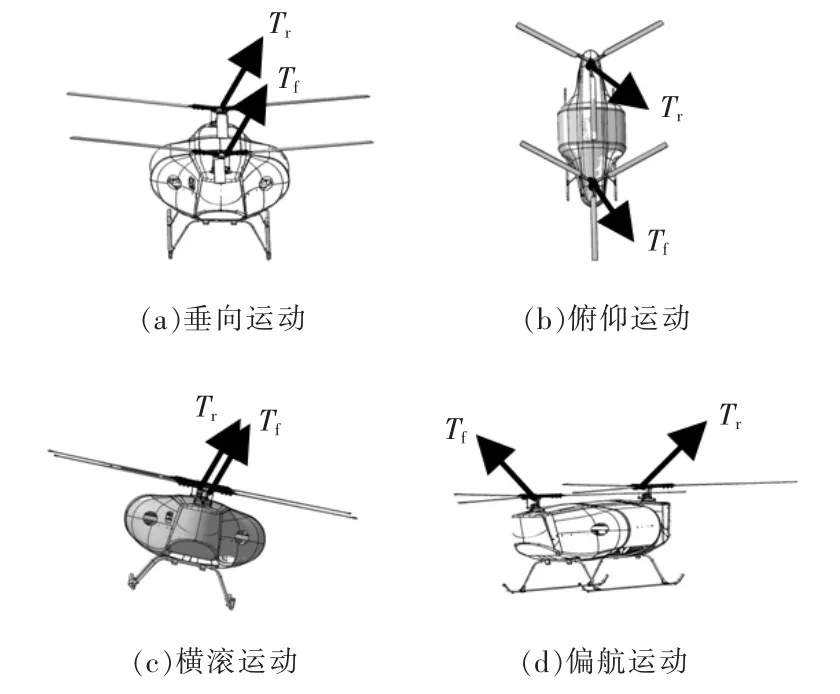
图2 纵列式直升机姿态Fig.2 Longitudinal helicopter attitude
2 飞行控制系统硬件设计
2.1 主控模块
主控模块是油动重载纵列式无人直升机飞行控制系统最核心控制部分,其主要任务是在每个控制周期内处理惯导数据以及发动机ECU(electronic control unit)采集到的数据,通过控制算法,计算得到无人机的位姿信息以及发动机状态数据信息,再结合遥控器发送过来的飞行动作控制信号,综合计算并将计算结果转化为不同占空比的脉宽调制信号来驱动8 个数字舵机(2 个油门舵机、6 个旋翼舵机),以确保纵列式无人直升机平稳地完成目标飞行任务。本文所采用飞控计算机集成了盛博科技的SCM-9022、ADT652、CSD 及电源和电池板等PC104板卡。调试接口为6 个串行接口,其中2 个422 接口,2 个RS232 接口,2 个RS485 接口;2 路CAN 协议接口;16 路可编程PWM(pilse width modulation)接口(50 Hz~400 Hz);8 路GPIO 接口;2 路AD/DA接口;1 路电源接口。
2.2 传感器模块
传感器模块主要分为姿态传感器模块和发动机状态传感器模块。姿态传感器模块主要采用光纤惯导来负责采集姿态信息,ZHTY INS650 是一款高性能、高性价比的惯性/卫星组合导航系统,内置三轴高精度光纤陀螺,三轴高精度加速度计,高精度气压计,1 个BD/GPS/GLONASS/GALILEO 四模接收机,可以测量载体的速度、位置、姿态,以及输出补偿后的角速率、加速度、气压、温度等信息,采用RS232 通信协议与主控进行通讯。发动机状态传感器模块主要功能包括检测发动机机油温度及压力、发动机燃油流量、发动机冷却液温度、发动机ECU总线电压、发动机转速等信息,采用CAN 通信协议与主控进行通讯。
2.3 无线通信模块
无线通信模块采用SDR400 高速调频数传电台,采用RS232 通信协议与主控进行通讯。
2.4 遥控器接收模块
PWM 和PPM 是接收机输出信号的2 种通行标准。PWM 信号相对于PPM 信号最大的区别在于PWM 的每条物理连线上只能传输1 个通道的信号,因此有几个通道的信号就需要几组物理连线[5]。每组物理连线一般为3 根线(电源线、信号线和地线),因此如果通道数较多,则物理连线会比较多。而在PPM 方式下,仅需1 根电源线、1 根信号线和1 根地线就可以传输多个通道的控制信号,非常方便。文中的接收机选用与FUTABA 遥控器发射机相匹配的R7108SB 接收机组成的一个18 通道2.4 GHz 遥控指令系统。本文使用主控制芯片的高级定时器输入捕获模式测量遥控器上的油门、俯仰、横滚和偏航4 个通道输入的PWM 脉冲宽度。
2.5 发动机继电器模块
发动机启动需要打开ECU 通道A、通道B、启动电源、油泵A、油泵B、点火开关,所以选用4 个四路12 V 继电器来控制远程发动机启停。
2.6 电源模块
电源模块主要采用12 V 锂电池,12 V~24 V 升压器,12 V~5 V 降压器为整机电子器件供电。
3 飞行控制系统软件设计
根据试飞试验所需功能将油动重载纵列式无人机软件系统分为系统初始化、惯导姿态数据采集、发动机ECU 数据采集、控制率解算、舵机控制、无线数据传输、地面站控制。系统控制流程如图3所示。
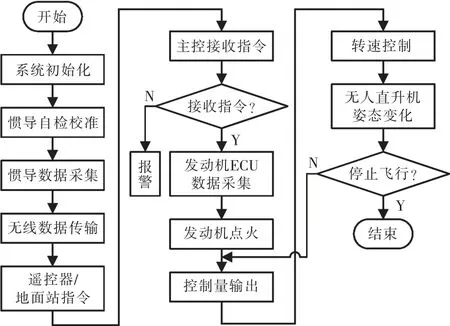
图3 无人直升机软件设计流程Fig.3 Unmanned helicopter software design flow chart
3.1 PID 控制原理
相较于其它的控制算法,PID 控制算法具有更快的响应速度、更好的适应能力等诸多优点,在工程实验中比较常用[6]。PID 控制算法通过给定期望值R(t)与实际输出反馈值Y(t)进行做差构成控制偏差e(t)[7],然后与比例、积分、微分三项线性组合对被控量进行调节控制,其PID 结构形式为
而在工程中实现此算法需要将数字系统离散化得到PID 离散化公式[8]:
3.2 低通滤波器
低通滤波器通过将高频部分的信号衰减来消除噪声。高频部分的信号是指频率高于截止频率的信号,而截止频率是指对滤波器对高频部分信号的衰减开始的频率。
一阶低通滤波器在时域上的开环传递函数为
二阶低通滤波器在时域上的开环传递函数为
式中:Wc为滤波器的截止频率;ξ 为阻尼比。
为了方便在程序中实现,需要分别将其离散化,式(5)为一阶低通滤波离散化公式,式(6)为二阶低通滤波器离散化公式:
式中:Y(n)为本次滤波输出值;Y(n-1)为上次滤波输出值;X(n)为本次采样值;a、b0、a1、a2为滤波器系数。
3.3 转速控制
该油动纵列式双发无人直升机主要是通过2个油门舵机来控制发动机油门开度从而控制无人机转速。而PID 控制算法具有响应快等优点,所以本文采用此算法进行转速控制,并在转速反馈通道加入二阶低通滤波器将高频信号进行衰减滤除达到稳定控制转速效果。发动机转速PID 控制原理如图4 所示。

图4 发动机转速PID 控制器结构图Fig.4 Engine speed PID controller structure diagram
3.4 姿态控制
主控通过读取光纤惯导解算的姿态数据来进行调整姿态控制,本文采用串级控制策略,内环PID控制角速率,外环PID 控制角度,并在角度与角速度回路分别采用二阶低通滤波器与一阶低通滤波器将姿态数据进行有效滤波,达到稳定控制无人机姿态效果。串级PID 控制结构原理如图5 所示。
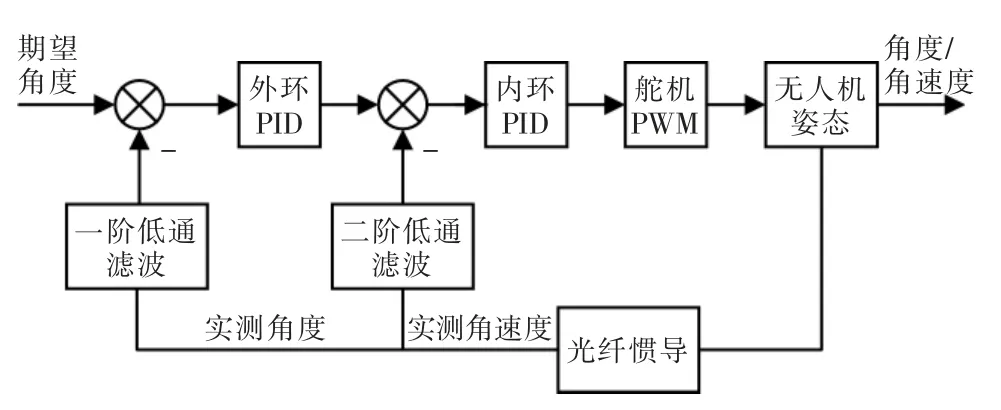
图5 无人机姿态PID 控制器结构图Fig.5 UAV attitude PID controller structure diagram
4 静态调试与飞行试验
4.1 静态调试
试飞实验前需要对整机进行静态调试,调试内容主要包括:①硬件电路连接:整机的线路连接是否正确;②软件测试:主控是否能够准确读取光纤组合惯导数据、发动机ECU 数据,以及油门舵机跟旋翼舵机输出舵量以及输出逻辑是否正确、上位机(地面站)与飞控无线通信是否正常;③程序拷机测试:将无人机所有电子器件长时间处于工作状态看是否有卡死状态。
4.2 飞行试验
4.2.1 转速调节实验
在进行转速调节试验时,需要牢牢固定地桩,确保无人机不会在高转速情况下发生意外情况。在转速调节实验过程中需要无人机在地面进行测试,不断调节PID 参数直至转速稳定。测试结果如图6所示,从图中可以看出左右双发动机转速值稳定维持在期望转速数值附近。
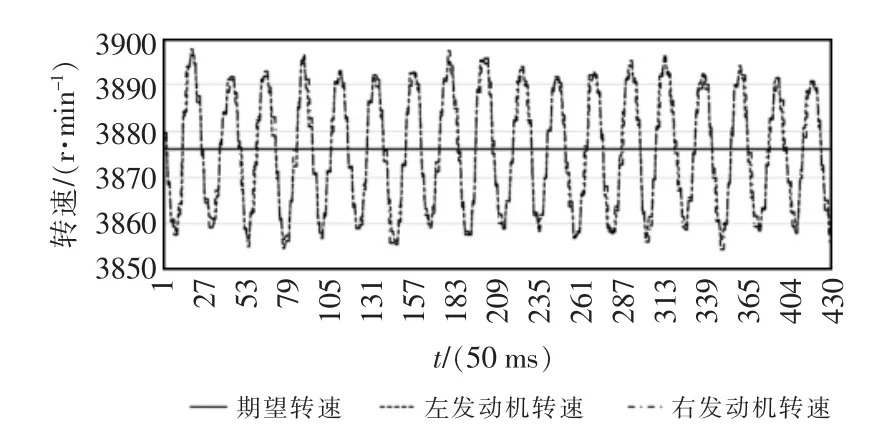
图6 发动机转速曲线图Fig.6 Engine speed curve
4.2.2 无人机系留试验
油动重载纵列式无人直升机试飞实验具有一定的危险性,一旦失控,很有可能会对机体造成严重损坏以及可能会威胁到试飞小组人员人身安全,所以选择在空旷无人地带采用系留试飞试验。飞行实验过程中,由于发动机转速调节已经经过测试,所以只需根据无人机起飞的姿态现象不断地进行调整俯仰、滚转、偏航3 个通道的PID 参数即可,直到无人机的实际姿态能够稳定跟踪期望姿态达到稳定悬停的情况。悬停试飞试验情况如图7 所示,姿态跟踪曲线如图8~图10 所示。

图7 纵列式无人机系留试飞试验Fig.7 Tandem UAV tethered flight test

图8 滚转角跟踪曲线Fig.8 Roll angle tracking curve
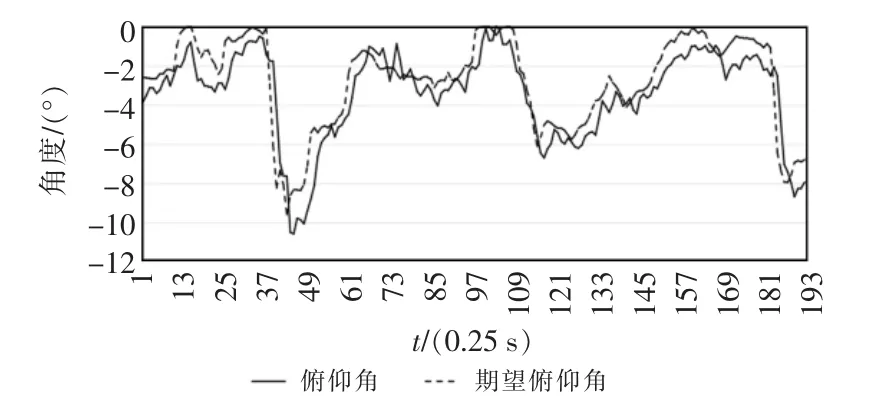
图9 俯仰角跟踪曲线Fig.9 Pitch angle tracking curve
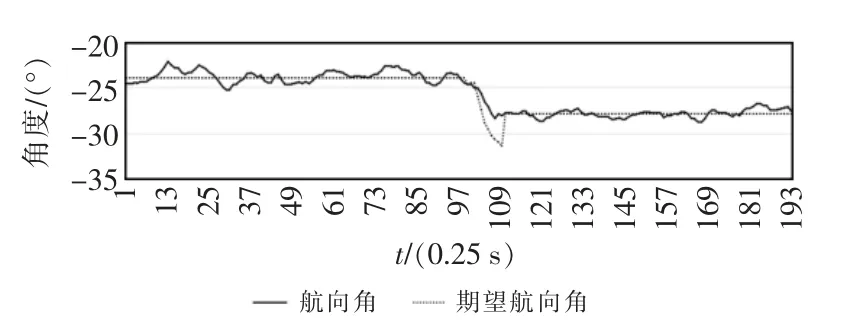
图10 航向角跟踪曲线Fig.10 Yaw angle tracking curve
5 结语
实验中油动重载纵列式无人机能够稳定悬停,转速控制中,实际发动机转速与期望转速不超过50 r/min,经过减速比转化得出旋翼转速不超过10 r/min;姿态控制中,期望姿态角与实际姿态角相差不到2°,满足飞行条件,达到了预期的试飞效果,通过工程实验验证了本文所设计算法的有效性。
猜你喜欢
财会月刊·上半月(2022年5期)2022-05-17
民用飞机设计与研究(2020年1期)2020-05-21
自动化学报(2019年6期)2019-07-23
民用飞机设计与研究(2019年4期)2019-05-21
电气电子教学学报(2018年3期)2018-10-11
航空世界(2018年7期)2018-07-04
电子制作(2018年1期)2018-04-04
机电信息(2018年6期)2018-03-05
制造业自动化(2017年2期)2017-03-20
电测与仪表(2015年8期)2015-04-09
