
三相有源电力滤波器重复滑模控制
2024-01-27 02:58李自成彭江林
自动化与仪表 2024年1期
李自成,彭江林
(江苏大学 电气信息工程学院,镇江 212013)
在电网中日益增多的非线性电力电子设备产生大量的谐波电流,这些谐波电流污染了电网。目前,电网谐波污染日益严重。有源电力滤波器具有安装方便、补偿性能高等优点,因此得到了广泛的应用。APF 谐波电流的PI 控制方法难以对高频谐波电流无误差跟踪[1]。文献[2]提出了一种重复控制与PI 控制并联的控制方法。相对于PI 控制方法,该方法提高了稳态精度,但是其动态性能依然由PI 控制决定;文献[3]提出了一种APF 的滑模控制方法。为削弱滑模控制的抖振,该方法采用了改进的指数趋近律和饱和函数;文献[4]提出了积分滑模控制方法,通过将状态变量的积分项引入到滑模面中,避免了高频噪声的干扰,并改进了指数趋近律以削弱抖振;文献[5]提出了一种多谐振滑模控制方法。通过在滑模面上增加电流跟踪误差的多个谐振项,该方法实现了对任意高频周期信号的高精度跟踪,但其计算量较大;文献[6]提出了一种APF 的超螺旋二阶滑模控制方法。该方法将滑模控制输出信号中的不连续项转移至高阶,从而使控制量在时间上连续,削弱抖振。本文提出一种APF 的重复滑模控制方法。采用变指数趋近率削弱抖振,并将基于变指数趋近率的滑模控制和重复控制并联,提高APF 的稳态精度。通过仿真证明了该方法的有效性。
1 三相APF 的数学模型
并联型三相APF 拓扑结构如图1 所示。usa、usb和usc为三相电网电压;isa,isb和isc为三相电网电流;ila,ilb和ilc为三相负载电流;ica,icb和icc为APF 产生的三相补偿电流;ufa,ufb和ufc为逆变器的三相输出电压;L 为滤波电感;R 为等效电阻;C 为直流侧电容;Udc为直流侧电压为IGBT。非线性负载为三相不可控整流器带阻感性负载,其电感为LL,电阻为RL。
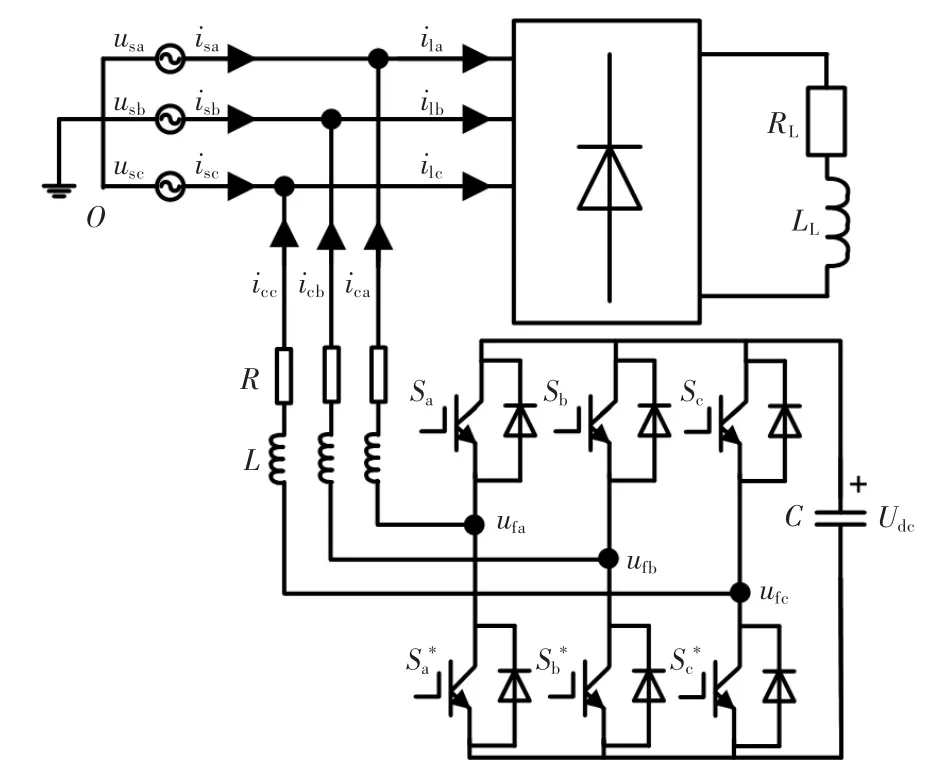
图1 三相并联型APF 的拓扑结构图Fig.1 Topology diagram structure of three-phase shunt APF
根据基尔霍夫电压定律和图1,可得APF 在三相静止坐标系下的数学模型为
经Clark 和Park 变换,可得APF 在同步旋转坐标系下的数学模型为
式 中:icd和icq、ufd和ufq、usd和usq分别为dq 轴下的APF 补偿电流、APF 输出电压、电网电压。ω 为电网基波角频率。
通过前馈解耦,可得解耦后的APF 的数学模型为
式中:Urd和Urq分别为d 轴和q 轴的等效控制量。
2 APF 重复滑模控制方法
2.1 APF 重复控制方法
重复控制基于内模原理,对谐波信号具有较高增益,理论上可对任意次谐波信号无静差跟踪,其传递函数为
式中:kr为重复控制增益;Q(z)为衰减函数;z-N为周期延时环节,N=fs/fi(fs为采样频率,fi为电网基波频率);z-N和Q(z)共同组成重复控制内模;zm为超前补偿环节,修正被控对象的相位;S(z)为补偿器,通常为一个低通滤波器,其主要作用为增强高频衰减,提高稳定性。
若由式(3)得到的APF 谐波电流控制的传递函数为P(z),指令电流为ir(z),补偿电流为ic(z),则APF 重复控制的结构如图2 所示。

图2 APF 重复控制结构图Fig.2 Structure diagram of repetitive control of APF
令C(z)=krzmS(z),根据图2,误差e 可表示为
若Q(z)=1,且指令电流ir(z)为周期信号,即ir(z)=z-Nir(z),则:
令H(z)=[Q(z)-C(z)P(z)],从式(6)可以看出,每经过一个基波周期,每个采样时刻的误差值都会衰减为原来的H(z)倍。若C(z)已将P(z)的幅值与相位完全补偿,则。因此,理论上在重复控制投入后的第2 个周期,在APF 补偿频段内的所有误差将完全消失。
由式(5)可得:
当Q(z)=1时,APF 处于临界稳定状态,所以一般取Q(z)=0.95,且ir(z)不一定严格按周期重复,因此,APF 的跟踪误差会在重复控制的作用下被逐周期修正。令,由式(7)可知,APF 的跟踪误差在重复控制的作用下最终衰减为初始值的K 倍。由于存在延时环节,重复控制输出有一个周期的延时,其动态性能较差。因此,其通常与其它控制一起使用。
2.2 基于指数趋近率的滑模控制方法
对于APF,滑模控制的目的是使补偿电流能够快速准确地跟踪参考电流。因此,定义滑模面为
式中:ird和irq分别为在d 轴和q 轴下的指令电流。
滑模控制包括趋近运动和滑模运动2 个过程。为减小系统状态到达滑模面的时间并削弱其由趋近运动到滑模运动产生的抖振,需要选取合适的趋近律,使得系统状态在远离滑模面时的趋近速度较快,在到达滑模面时的趋近速度尽可能小[7]。常用的指数趋近率为
式中:ε>0,q>0。
对于式(9),随着s 从离滑模面较远位置逐渐靠近滑模面,指数趋近项-qs 能使系统状态的趋近速度从较大初始值逐渐减小至0。这样能够减小系统状态到达滑模面的时间并且减小其到达滑模面时的速度。但是指数趋近项并不能确保系统状态在有限时间内到达。当s 接近滑模面时,等速趋近项-εsgn(s)使趋近速度为ε,可以保证系统状态在有限时间内进入滑动模态。因此,式(9)具有趋近速度快的优点,但是由于存在等速趋近项,因此理论上无法消除抖振。在选择参数时,增大q 并且减小ε,可以保证系统状态快速到达滑模面,同时削弱抖振。
指数趋近率产生的抖振难以避免,积分滑模控制能有效削弱抖振,减小高频噪声干扰,提高稳态精度[8]。因此,选取积分滑模面为
将式(3)和式(10)代入式(9),可得基于指数趋近率的滑模控制律为
2.3 基于变指数趋近率的滑模控制方法
选择李雅普诺夫函数为
由式(12)和式(13)可得:
由式(14)可知:当s≠0 时,V˙=s˙s<0,该趋近率满足滑模控制的可达性条件。
若系统初始状态s(0)>1,则系统状态的趋近运动可分为从s(0)到s=1 和从s=1 到s=0 两个阶段。当s(0)>1 时,系统状态处于从s(0)到s=1 的运动阶段时,式(12)可改写为
式(15)可看作s 的微分方程,求解此方程,可得系统状态在此阶段的运动时间t1为
当系统状态处于从s=1 到s=0 的运动阶段时,式(12)可改写为
对式(17)的微分方程求解,可得系统状态在此阶段的运动时间t2为
系统状态到达滑模面的时间t 约为t1+t2。若s(0)<-1,趋近运动也分为从s(0)到s=-1 和从s=-1到s=0 两个阶段,分析过程与s(0)>1 时类似。综上所述,提出的趋近律满足可保证系统状态在有限时间内到达滑模面。
2.4 APF 重复滑模控制方法
采用滑模控制的APF 对高次谐波的追踪能力有限,并不能完全消除跟踪误差。通过将基于变指数趋近率的滑模控制与重复控制并联,提出了一种APF 重复滑模控制方法。在该方法中,滑模控制使得APF 稳定并实现APF 在指令电流变化时的快速响应;重复控制则补偿所有高次谐波分量,提高稳态精度。滑模控制和重复控制同时对误差信号响应并决定APF 的逆变器输出电压。APF 重复滑模控制的结构如图3 所示,重复控制输出与滑模控制输出的和为等效控制量,通过解耦得dq 坐标系下的逆变器输出电压分量经调制得到IGBT 的驱动信号G。

图3 APF 重复滑模控制结构图Fig.3 Structure diagram of repetitive sliding mode control of APF
3 仿真验证
为了验证所提出的重复滑模控制方法,建立了APF 的Matlab 仿真模型。该模型采用dq 法提取指令电流,采用PI 控制调节直流侧电压。APF 的主要参数:电网电压有效值为220 V,fs=20 kHz,fi=50 Hz,L=5 mH,R=0.1 Ω,Udc=700 V,C=5000 μF,RL=10 Ω,LL=5 mL。为了模拟负载变化,在0.5 s 时,在原阻感性负载的两端并联一个相同的阻感性负载。基于指数趋近率的滑模控制的参数为k1=1×10-8,k2=5×104,ε=1×103,q=5×103。重复滑模控制的参数为kr=0.9,m=3,p=3,ε=q=1×104。
负载变化时的isa仿真波形如图4 所示,可知,两种控制方法都能使APF 在负载变化时跟踪指令电流,补偿后的isa都在约2 个周期后达到稳态,重复滑模控制补偿后的isa更接近正弦波。

图4 负载突变时的isa 仿真波形Fig.4 Simulation waveforms of isa with a step load change
APF 处于稳定状态时,基于指数趋近率的滑模控制和重复滑模控制的isa的仿真波形如图5 所示。由图5 可知,重复滑模控制补偿后的isa更接近正弦波。

图5 稳态时的isa 仿真波形Fig.5 Simulation waveforms of isa in steady state
如图6 所示,为补偿前、基于指数趋近率的滑模控制和重复滑模控制的isa的总谐波畸变率。由图6 可知,补偿前的isa中5 次、7 次、11 次和13 次谐波相对于基波的百分比分别为19.1%、8.08%、3.56%和2.21%,总谐波畸变率为21.25%。基于指数趋近率的滑模控制补偿后的isa中5 次、7 次、11 次和13次谐波相对于基波的百分比分别为1.78%、1.24%、1.63%和0.36%,总谐波畸变率为3.87%。重复滑模控制补偿后的isa中5 次、7 次、11 次和13 次谐波相对于基波的百分比分别为0.48%、0.55%、0.51%和0.30%,总谐波畸变率为1.80%。

图6 仿真的电网电流THDFig.6 Simulated grid current THD
由图5 和图6 可知,采用重复滑模控制时,电网中的谐波分量得到了有效补偿,相对于采用基于指数趋近率的滑模控制,其电网电流谐波畸变率更低。
4 结语
本文提出了一种APF 的重复滑模控制方法。在指数趋近率的基础上,提出了一种变指数趋近率,进而得到了基于变指数趋近率的滑模控制律。为提高该控制方法对高次谐波的追踪能力,将基于变指数趋近率的滑模控制与重复控制并联,提出了一种APF 重复滑模控制方法。仿真证明,相对于基于指数趋近率的滑模控制方法,提出方法具有更高的稳态精度。
猜你喜欢
哈尔滨铁道科技(2020年4期)2020-07-22
中国惯性技术学报(2019年6期)2019-03-04
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
黑龙江工程学院学报(2015年5期)2015-12-04
电源技术(2015年11期)2015-08-22
电测与仪表(2015年8期)2015-04-09
电测与仪表(2015年12期)2015-04-09
电测与仪表(2014年14期)2014-04-04
电测与仪表(2014年2期)2014-04-04
