
考虑母线电压滤波的逆变器自抗扰控制器设计
2024-01-19 08:16:54马幼捷温素娜周雪松刘茂
电测与仪表 2024年1期
马幼捷,温素娜,周雪松,刘茂
(天津理工大学 电气电子工程学院,天津 300384)
0 引 言
近年来新能源风力发电技术得到了迅速的发展与广泛的应用,其中变速恒频(variable speed constant frequency, VSCF)已成为此领域研究的热点。变速恒频风力发电系统包括直驱永磁同步风力发电(permanent magnet synchronous generator, PMSG),功率转换模块采用背靠背全功率变换器[1-2]。全功率变换器的控制通常采用母线电流内环、电压外环双闭环结构来实现功率传输及稳定母线电压[3]。当系统输出功率、机侧扰动及负荷突变时,在故障期间会引起网侧输出与机侧输出的不平衡,迫使母线电压升高,进而导致变流器无法正常工作[4-6]。
目前,变流器母线电压控制主要依靠传统的比例积分(proportion integration, PI)控制,可实现无静差跟踪给定值[7-8],但仍存在超调与快速性的矛盾。由此韩京清研究员提出了自抗扰控制(active disturbance rejection controller, ADRC)技术[9],为扰动补偿方法提供了全新思路。ADRC中的核心元素扩张状态观测器(extended state observer, ESO)可对被控系统中状态变量进行准确估计,同时将系统模型不确定部分和来自于环境的外部干扰实时观测,并扩张为新状态变量,通过扰动补偿环节,将被控对象补偿为积分器串联型,因此自抗扰控制无需依托准确的数学模型[10-13],对于控制增益难以确定的实际系统,亦可对状态变量进行精确估计。
在传统的二阶线性自抗扰控制中并未考虑母线电压滤波结构的影响,由于存在量化误差等原因,计算得到的直流侧母线电压会存在测量噪声[14-15]。反馈信号经过惯性环节滤波后可造成反馈信号与真实系统输出存在幅值相位的差异,从而影响控制器输出,降低系统稳态及动态性能。文献[16]提出了基于三阶线性自抗扰技术的并网电流及有源阻尼控制策略。文献[17]提出采用卡尔曼滤波器对被控系统的测量信号进行滤波,使降阶的ESO具有较高的观测精度,但此滤波算法计算量较大,影响其收敛速度。文献[18]提出了积分ESO,可处理掺杂噪声的量测信号,并以此构造出积分型自抗扰控制器,但此种方法易出现积分饱和的现象。
文章针对PMSG直流侧母线电压二阶线性ADRC系统,采用线性一阶惯性环节对母线电压进行滤波,将一阶惯性环节滤波的母线电压扩张为线性ESO新的状态变量,由改进的线性扩张状态观测器对滤波前母线电压进行估计并反馈,可消除因惯性环节导致的母线电压纹波。增加滤波环节后电压外环变为三阶系统,采用改进后的四阶线性ESO对滤波前真实系统输出进行观测,并将其作为反馈信号,由此构建出改进的线性自抗扰控制器,消除了母线电压纹波。最后在MATLAB/Simulink平台上验证该方法的有效性。
1 系统建模
网侧变流器控制框图如图1所示,其中L、R、C分别为滤波电感、滤波电感内阻、及滤波电容。
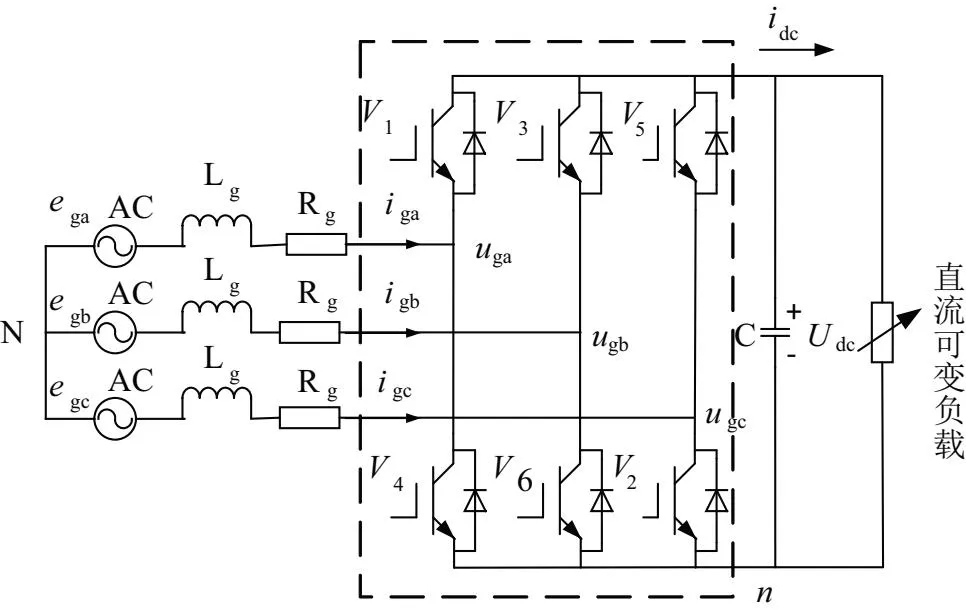
图1 风电逆变器拓扑结构
根据图1,可得网侧逆变器在静止三相坐标系下的数学模型:
(1)
式中iga、igb、igc和ega、egb、egc分别为网侧的相电流与相电压;uga、ugb、ugc为网侧变流器相电压,式(1)经过坐标变换,得到网侧逆变器在dq坐标系下的数学模型:
(2)
式中egd、egq为电网电压在两相旋转坐标系dq轴下的分量;igd、igq为电网侧电流在两相旋转坐标dq轴的分量;ugd、ugq为变流器侧电压在两相旋转坐标dq轴的分量;ωr为同步电角速度[19]。
选取系统直流侧母线电压Udc为状态变量X1,将逆变器侧电Ud作为控制量u,将总扰动ω(t)扩张为新状态变量x3,假设扰动变化缓慢,即在一个采样周期内为定值,则系统的状态方程与输出方程为:
(3)
令y1为状态变量x1的观测值,其为系统真实输出x1与观测噪声δn的和,即y1=x1+δn。为减小噪声,通常将母线电压信号滤波后作为控制器的反馈输入。现将滤波器设计为一阶惯性环节,其截止频率为ωc,滤波时间常数为T,得滤波后的状态变量x0为:

(4)
Tωc= 1,Tf=0 ms表示反馈信号无滤波。
由此,变流器系统的状态方程与输出方程为:
(5)
2 传统自抗扰控制器的设计
LADRC结构利用有限差分法来安排过渡过程,提取差分信号,从而消除超调与快速性之间的矛盾。由于给定值的特性,文中不使用LTD。图2为传统的 LADRC结构图,v,y分别为直流母线电压的参考值和系统的输出;b表示控制增益;u为控制变量,物理意义位逆变器的输出电压;z1,z2,z3为LESO观测系统的输出、系统输出的微分以及总扰动信号。

图2 传统的 LADRC结构
表1比较了不同阶数的LADRC对风电变流器系统的控制性能。主要性能指标为:稳态误差、上升时间(LESO跟踪系统输出)、总扰动、高电压穿越期间母线电压波动范围。
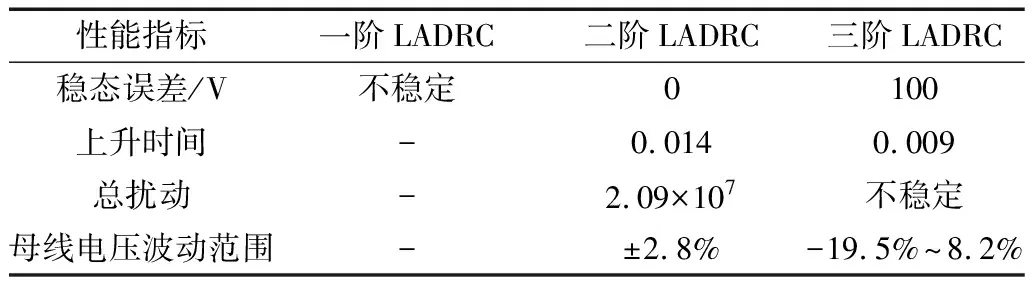
表1 不同阶数LADRC的控制性能对比
由表1可知,在二阶LADRC控制策略下,变流器系统可以实现无稳态误差运行,具有较强的跟踪和抗干扰性能。一阶和三阶LADRC的控制效果较差。因此,设计了一种二阶LADRC控制器。
2.1 反馈控制律设计
(6)
采用线性PD反馈控制律:
(7)
式中kp为比例增益,kd为微分增益。
根据式(3)、式(7)可得控制品质为:
(8)

2.2 不考虑母线电压滤波的线性ESO设计
三阶线性ESO对系统(3)进行状态观测,数学模型如式(9)所示,结构框图如图3所示。
(9)
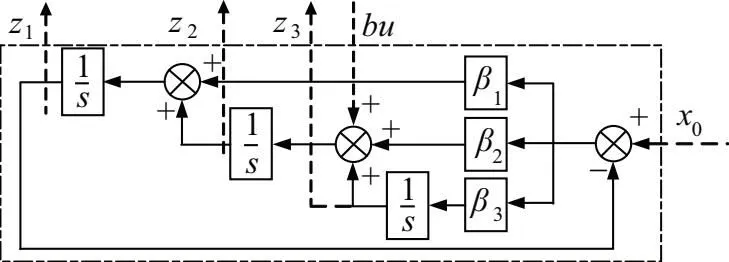
图3 三阶LESO结构框图
式中z1,z2,z3为系统状态变量x0,x1及总扰动x3的估计值;β1,β2,β3为观测器误差增益;e1为LESO对反馈x0的观测误差。
由式(9)得到LESO的传递函数为:
(10)
式中,s3+β1s2+β2s+β3为三阶LESO的特征多项式。通过极点配置方法,令s3+β1s2+β2s+β3为理想特征多项式(s+ω0)3,即β1= 3ω0,β2= 3ω02,β1=ω03;ω0为观测器带宽。选取合适的观测器带宽,LESO可实时估计出系统状态变量与总扰动,即z1→x1、z2→x2、z3→x3。
通过式(10)可知,LESO对阶跃输入具有渐进收敛性。分别用z1,z2,z3代替式(8)中的x1、x2、x3,得到理论控制品质u与实际控制品质u1:
(11)
(12)
由此可得二阶LADRC结构框图,如图4所示,图5为逆变器母线电压的二阶LADRC系统控制框图。
2.3 传统ADRC系统的响应
为简化分析,以下数学模型中不考虑控制输出的限幅。由式(8)、 式(9)化简得:
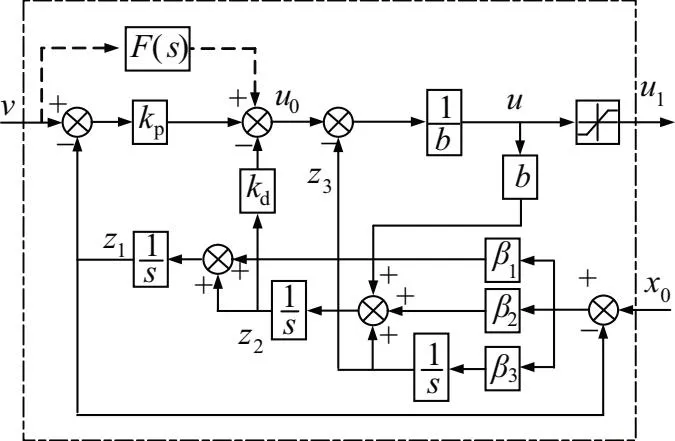
图4 二阶线性自抗扰控制器
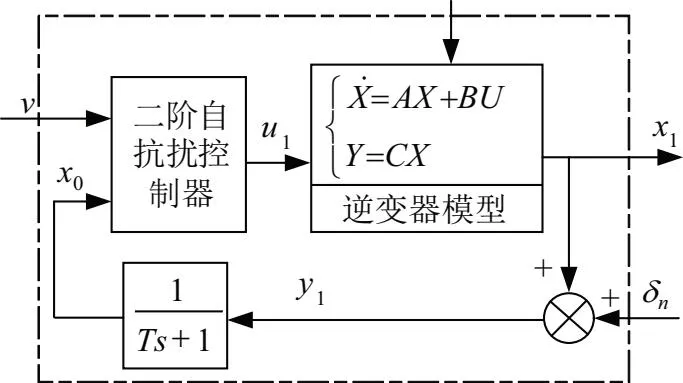
图5 ADRC系统结构框图
(13)
式中G1(s)、G2(s)、G3(s)分别为:
G1(s) = (s2+kds+kp)(s3+β1s2+β2s+β3)
G2(s) = (β1kp+β2kd+β3)s2+(β2kp+β3kd)s+β3kp
G3(s) = [s2+(β1+kd)s+β1kd+β2+kp]s
令Gf(s) =Ts+1,由式(5)、式(13)可得控制系统的响应:
(14)
其中,GfG3s2+G2项为系统特征多项式。根据式(14),反馈通道滤波环节的时间常数T对系统的抗干扰、跟踪和抑制观测噪声的性能全部造成影响。
3 考虑母线电压滤波的改进自抗扰控制器
3.1 考虑母线电压滤波的改进线性ESO
为消除滤波环节对系统性能的影响,设计四阶LESO对系统(3)进行状态观测,数学模型如式(15)所示,图6为四阶LESO结构框图。
(15)
式中z0、z1、z2、z3分别为状态变量x0、x1、x2及总扰动x3的估计值;四阶LESO对反馈x0的观测误差为e0;β0、β1、β2和β3为观测器误差增益。

图6 四阶LESO结构框图
由式(15)可得z1、z2、z3的传递函数:
(16)
在式(16)中,(Gf+β0)s3+β1s2+β2s+β3是LESO的特征方程多项式。根据式(10)、式(11)可简化为:
(17)
式中G1(s)、G2(s)、G3(s)分别为:
G1(s) = (s2+kds+kp)[(Gf+β0)s3+β1s2+β2s+β3]
G2(s) = (β1kp+β2kd+β3)s2+(β2kp+β3kd)s+β3b3kp
G3(s) = [(Gf+β0)(s2+kds+kp)+β1(kd+s)+β2]s
由式(5)、式(17)可得系统输出:
(18)


根据式(18)可得,反馈通道中滤波器环节的时间常数T对系统的抗扰、跟踪和抑制观测噪声的性能均不会造成影响。
3.2 改进型系统的性能分析
3.2.1 跟踪性能分析
根据输入信号是否具有一阶及二阶导数,可将系统给定信号分为以连续的正弦信号输入和非连续的阶跃信号输入。
正弦信号作为被控对象输入,其微分为余弦量,可通过前馈项消除跟踪输入的固有误差。由式(18)可知,被控系统可无静差跟踪输入。
当阶跃信号为被控系统输入时,其微分为脉冲响应,在实际应用系统中,可忽略前馈项信号的影响,此时在输入v(s)下的传递函数为:
(19)
3.2.2 系统的抗扰性分析
由式(19)知系统在扰动信号x3(s)作用下传递函数为:
(20)
当ω0= 50,kp= 20,kd= 10,T分别取0 ms、0.1 ms,1 ms时,图7所示为式(20)的频域特性曲线。由仿真图可知,滤波器时间常数的变化不影响系统的抗干扰性能,但略差于无滤波系统。

图7 系统抗总扰动的频域特性曲线
3.2.3 测量噪声抑制的特性分析
由式(18)得,在反馈环节中的观测噪声作用下,控制器输出的传递函数如式(21)所示,系统输出的传递函数如式(22)所示。
(21)
(22)
当ω0=50,kp=20,kd=10惯性时间常数T分别取0 ms、0.1 ms,1 ms时,图8为式(21)和式(22)的Bode图。
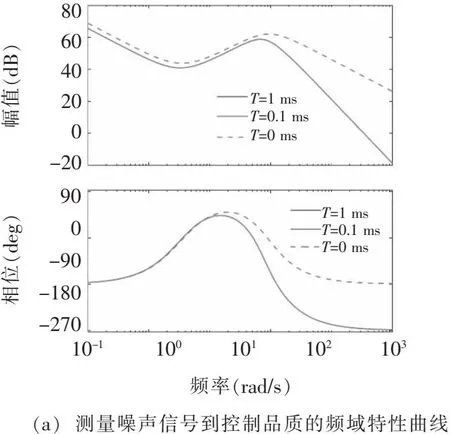
图8 改进ADRC系统的测量噪声抑制特性
由图8可知,改进型系统在Tf=0.1 ms和Tf=1 ms时具有相同的抑制测量噪声性能,与Tf=0 ms时相较有明显改善。
由以上仿真论证可得,在改进ADRC系统中,系统的性能与T无关,比较母线电压无滤波时,抗扰性能略有下降,但抑制观测噪声性能较好。改进型系统具有较强的滤波性能,因此可适当提升改进型LESO的带宽,抑制高频噪声性能微下降,但抗扰性能更佳。
3.2.4 系统的稳定性能分析
图9为结合实际系统的LADRC控制结构图。

图9 结合实际系统的LADRC控制结构图
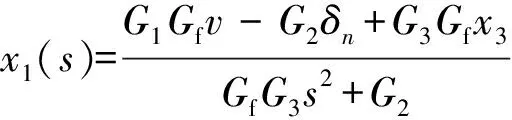
根据图9可知直流母线电压传递函数为:
(23)
式中v、y分别为直流母线电压的参考值和系统的输出;x3为系统的扰动,Gv、Gf分别为在输入和扰动下的传递函数。
参考输入的闭环传递函数,根据式(23)和式(18)中G3(s)得;
(24)

a0~a6均大于0,根据李纳德-戚帕特稳定性的充要条件是奇数的Hurwitz行列式是正的:
由数值计算可知,控制器带宽和观测器带宽的变化不影响改进后的LADRC系统在一定范围内的稳定性。
4 仿真与实验
4.1 改进系统的控制性能分析
为验证改进线性自抗扰控制器的有效性,在MATLAB/Simulink中搭建了1.5 MW永磁同步风力发电机模型。PMSG和控制器参数如表2、表3所示。
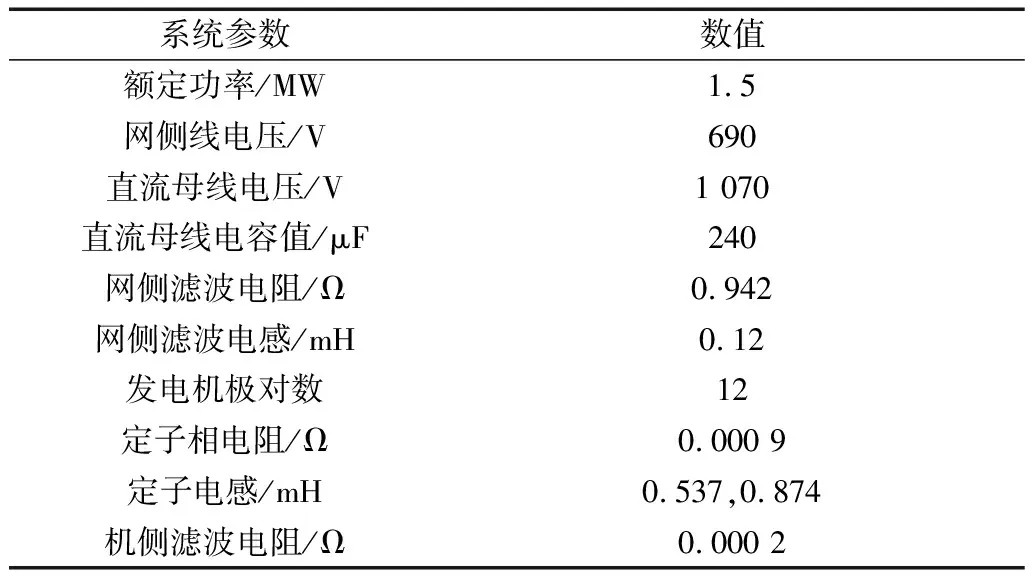
表2 风电系统模型参数
LADRC参数控制器带宽,观测器带宽,二者可分别调参。
1)根据被控系统模型(5),控制增益bo可确定;
2)选取ωc,ωo初值,保持ωc不变,逐步增大ωo到噪声作用超过系统要求;
3)逐渐增大ωc,当噪声致使系统输出波动时下调ωo,然后逐渐上调ωc,依次循环调节,直到满足控制要求。
自抗扰控制器参数如表3所示。
设置ω0= 700,Tf分别为0 ms、0.1 ms和1 ms,图10为传统系统与改进系统直流侧母线电压的阶跃响应曲线。
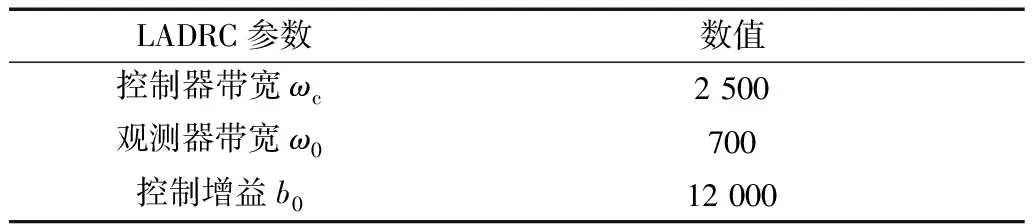
表3 控制器参数
对比图10(a)、图10(c)可知,传统系统中随着母线电压滤波时间常数的增加,系统抑制噪声的性能提升,阶跃响应会产生振荡。对比图10(c)、图10(d)可以看出,阶跃响应几乎一致,即无电压滤波时改进控制器不影响系统性能。综合仿真可知,传统系统的母线电压波动范围较大,改进系统具有较好的响应曲线,消除了由母线电压滤波造成的影响,且使控制量超调减小。
4.2 改进系统的抗干扰分析
为了验证改进后系统的抗干扰性能,以电网三相对称故障为例,对扰动下的母线电压进行了仿真。
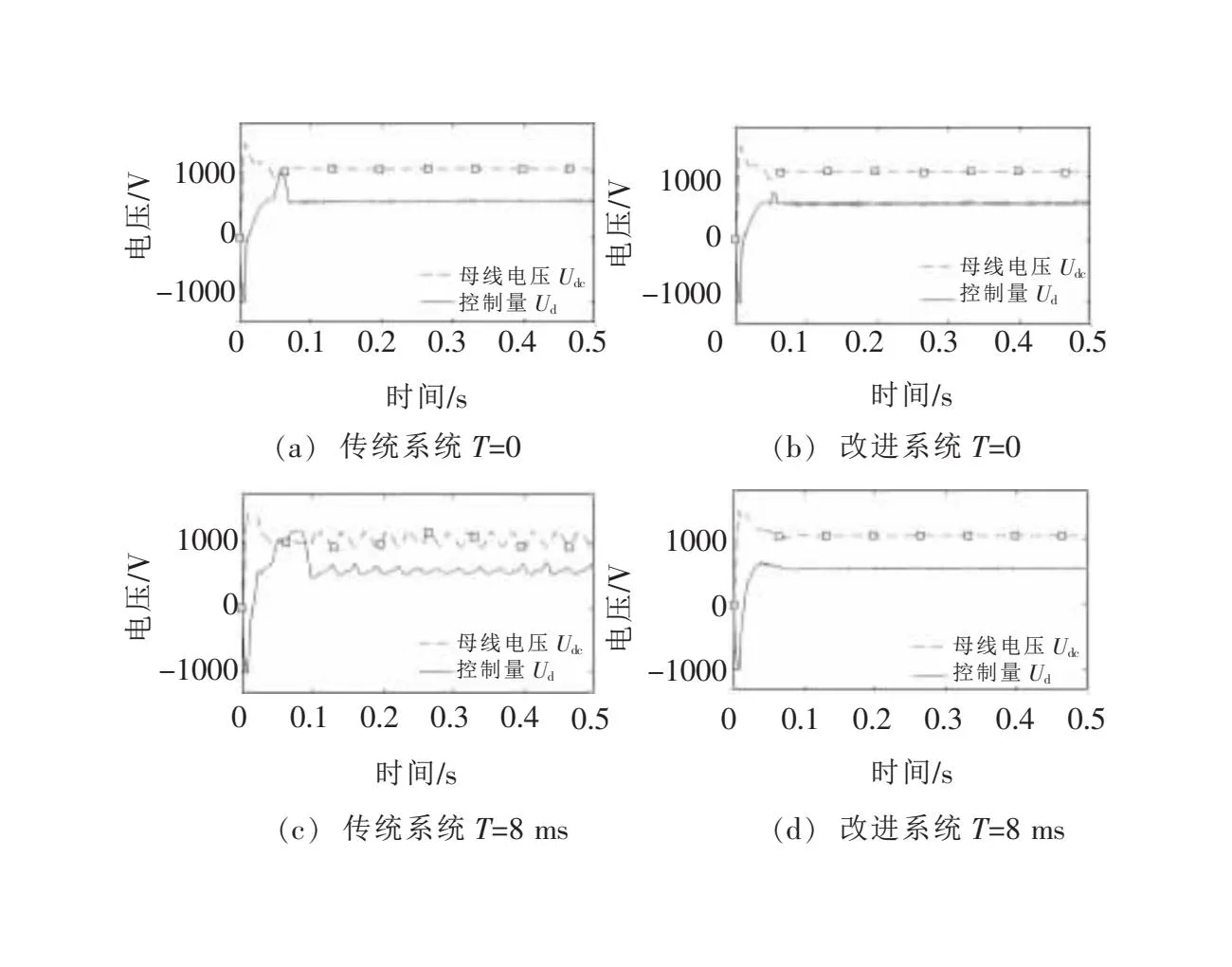
图10 传统系统与改进系统的母线电压波形对比
图11(a)为电机甩载工况下直流母线电压波形,说明了在有功功率大范围波动时,自抗扰控制下的变流器系统较传统PI控制,在抗干扰性能方面有较大提升;图11(b)、图11(c)描述了并网点电压在t=0.3 s时跌落至0.8 p.u与骤升至1.3 p.u的直流侧母线电压的对比波形,在t=0.5 s时故障清除。从图11可知,改进后的系统在并网点电压降和恢复的动态过程中抗扰性稍差,这也验证了在图7的理论分析,可通过增加观测器带宽提升系统的抗低频干扰性能。
图12为向母线电压的观测信号中施加白噪声扰动后系统的响应曲线,其中白噪声模块功率值设置为0.5,采样时间为10 ms,对比图12可知,传统系统中随着滤波时间常数的增加,系统输出不稳定。由图12(a)~图12(d)可以看出,改进系统在母线电压滤波时可消除惯性时间常数的影响,同时提升抑制观测噪声的能力。
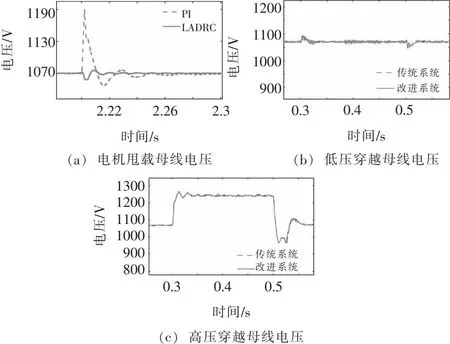
图11 高低压穿越时系统抗扰性能对比
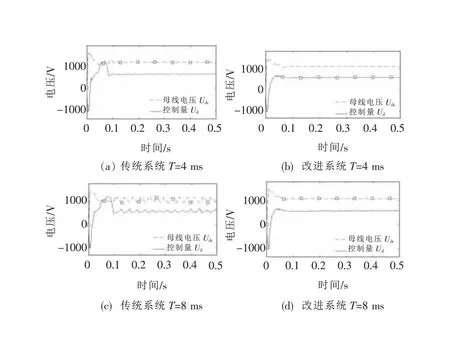
图12 施加观测扰动时母线电压响应曲线
5 结束语
在永磁同步风力发电系统中,传统的直流侧母线电压外环二阶自抗扰控制在设计时未考虑母线电压滤波结构的影响,这将导致直流侧产生低频纹波。文章通过改进三阶LESO,电压值经滤波后扩张成新状态变量,使自抗扰控制器中的反馈信号真实反映系统输出,消除增加滤波环节导致的幅值及相位变化的影响,从而提升系统性能。
通过扩张一个新的状态变量,将传统观测器改造为四阶LESO,使其具有更好的滤波特性。基于四阶LESO的改进系统有效降低了系统噪声,且不再受滤波时间常数T影响。当LESO带宽一定时,传统系统的抗扰性能稍优于改进系统,但改进系统抑制测量噪声的性能明显提升,因此可适当增大LESO带宽,降低部分抑制噪声性能以获取较强抗扰性能。
猜你喜欢
电气电子教学学报(2023年5期)2023-11-13 08:43:16
电子产品世界(2023年12期)2023-03-20 10:16:37
湖南大学学报·自然科学版(2021年1期)2021-02-21 08:39:40
铁道科学与工程学报(2015年5期)2015-12-24 12:12:08
深空探测学报(2015年3期)2015-12-07 11:15:06
安徽师范大学学报(自然科学版)(2015年3期)2015-04-25 02:40:12
电测与仪表(2015年4期)2015-04-12 00:43:06
电测与仪表(2015年19期)2015-04-09 11:32:56
电测与仪表(2015年5期)2015-04-09 11:30:46
电测与仪表(2014年11期)2014-04-04 09:21:36
