
惯量阻尼自适应虚拟直流发电机控制策略
2024-01-19 08:17:00王正男张新慧彭克高震程梦竹
电测与仪表 2024年1期
王正男,张新慧,彭克,高震,程梦竹
(山东理工大学 电气与电子工程学院, 山东 淄博 255000)
0 引 言
随着能源短缺问题的日益严峻,新能源分布式发电技术成为国内外研究的热点,与此同时,适用于分布式电源大规模接入的直流微网的研究也受到了广泛的关注[1-2]。直流微网由储能系统、分布式电源与负载等部分构成,与交流微网相比,直流微网无需考虑频率、无功、相位等因素,供电质量更高。但在直流微网中,元件大多通过电力电子器件与母线相连接,致使直流微网成为了一个低惯性网络,严重时会危害直流微网的安全稳定运行。针对此问题,模仿应用于交流微网中的虚拟同步发电机(virtual synchronous generator,VSG)控制策略[3-5],文献[6]提出了能量路由器的概念,对交流变换器应用VSG控制策略,对直流变换器应用虚拟直流发电机(virtual DC generator,VDCG)控制策略,从而增强系统惯性。文献[7-9]分别提出了VDCG控制策略在直流微网中光伏电源侧、负荷侧与储能侧的应用方式。以上对于VDCG控制策略的研究侧重于不同变换器之间的应用,未考虑虚拟参数具有灵活调节的特性。文献[10]通过引入母线电压变化率,提出了一种惯量随电压变化率变化的自适应惯量阻尼控制策略,提升了其暂态性能;文献[11]采用了具有限幅能力的反正切函数,根据功率波动、电压幅值与电压变化率对惯量阻尼进行了分层控制,通过对不同情况设置不同调节系数进行自适应控制。目前已有自适应VDCG控制策略均采用在母线电压变化率前增加常系数调节量的控制方式,没有考虑过母线电压偏差对于系统惯性的需求,利用电压变化率的常数倍进行惯性调节也未能充分发挥出虚拟参数调节的灵活性。
文中通过分析惯量阻尼在控制中的作用、扰动时母线电压波动过程中系统运行状况变化以及对惯性的需求,提出了一种附加动态调节系数的惯量阻尼自适应控制策略,可以更加灵活地调节系统惯性,减小功率波动带来的影响。同时建立了应用该控制策略的直流微网小信号模型,利用阻抗比判据进行了小信号稳定性分析。最后利用PSCAD/EMTDC软件进行建模仿真,验证了所提控制策略的有效性。
1 虚拟直流发电机控制策略
VDCG控制策略是通过模拟直流发电机的机械方程与电气方程,使变换器具有与直流发电机相似外特性的控制策略。直流发电机与DC/DC变换器VDCG控制策略的对应关系如图1所示。
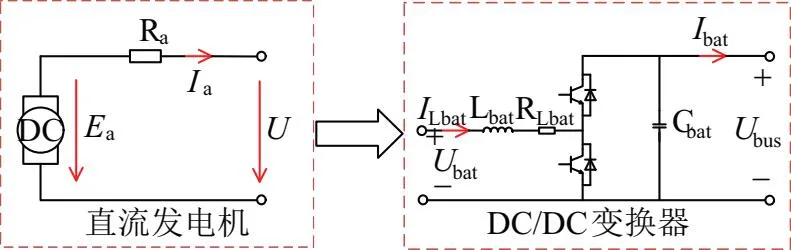
图1 VDCM模型
VDCG数学模型如下所示。
机械方程:
(1)
(2)
式中J为转动惯量;D为阻尼系数;Tm与Te分别为VDCG的机械转矩与电磁转矩;ω与ω0分别为VDCG的实际角速度与额定角速度;Pe为电磁功率。
电气方程:
Ea=U+IaRa
(3)
Ea=CTΦω
(4)
式中Ea为电枢电动势;U为机端电压;Ia为电枢电流;Ra为等效电枢电阻;CT与Φ分别为转矩系数与每极磁通。
在直流微网中,假设分布式电源输出功率为0,则储能系统所承担的功率即为负载所消耗的功率与维持母线电压偏差在允许范围内所补偿的功率之和。当直流微网中输入输出功率平衡时即可维持母线电压的稳定。此时储能系统所承担的功率即为VDCG控制策略中的机械功率Pm。
储能单元所承担功率为:
(5)
式中Pbat为储能单元所需承担的功率;Ibat为双向DC/DC变换器输出电流;Uref与Ubus分别为母线参考电压与实际母线电压;Uload与Iload分别为负载电压与负载电流。
根据式(1)~式(5),可得VDCG控制策略总体控制框图如图2所示。
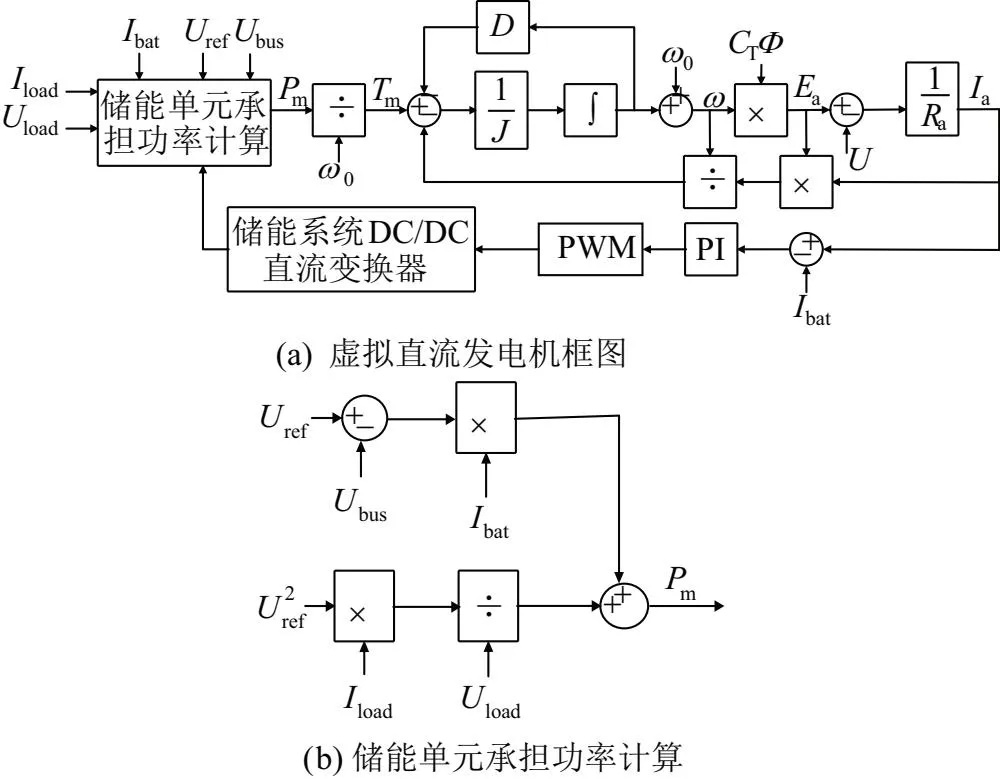
图2 虚拟直流发电机双向DC/DC变换器总体控制框图
VDCG控制策略输出的电枢电流Ia即为双向DC/DC变换器的参考输出电流。
2 惯量阻尼自适应控制策略
2.1 惯量阻尼参数分析
在直流微网中,储能系统可根据系统功率缺额改变自身的输出功率,以维持系统的功率平衡。VDCG控制策略对于双向DC/DC变换器的控制体现在当系统发生功率波动,出现机械功率与电磁功率间的不平衡功率时,利用控制策略平滑地调节储能系统的有功输出功率,从而为直流微网系统增加惯性,达到抑制直流母线电压突变的目的。
根据图2(a)可得虚拟机械转矩Tm至虚拟电动势Ea的传递函数如式(6)所示:
(6)
由式(1)~式(4)可推得:
(7)
式中Pm=Tmω0为机械功率;Un为输出电压额定值;CT、Φ、Ra、ω0均为常数。
由式(6)、式(7)可知,VDCG控制策略相当于引入了一阶惯性环节。当系统处于稳态时,电压变化率为0,电压稳定性取决于阻尼D,在输出电压不等于额定电压时提供与电压偏差值相关的阻尼转矩,抑制由功率变化引起的电压波动,起到减小电压偏差的作用;当系统处于暂态时,J与D均会起到稳定电压的作用,增大J可以在电压变化率相同时产生更多的惯性转矩,延缓系统的响应速度,抑制电压波动。
综上所述,增大J与D均会增大系统的惯性,减慢母线电压恢复速度,给予系统更多的响应时间,从而在功率波动时起到抑制母线电压波动的作用。
2.2 受扰动时母线电压波动曲线分析
直流微网的稳定运行要求母线电压具备较强的鲁棒性,即:母线电压变化时,应减小其变化的速度和幅值;母线电压恢复时,应缩短其电压恢复时间,使母线电压的变化更加平滑。当直流微网功率波动时,母线电压随时间的变化曲线如图3所示。

图3 受扰动时母线电压波动曲线
扰动时,母线电压波动大致可分为①~④四个阶段。当处于第①阶段与第③阶段时,电压偏差ΔU=Ubus-Uref与电压变化率du/dt同号,电压偏差逐渐增大,为抑制电压变化,应增大系统惯性,减小电压波动幅度;当处于第②阶段与第④阶段时,电压偏差与电压变化率异号,电压偏差逐渐减小,为加快母线电压恢复速度,应减小系统惯性,缩短母线电压恢复时间。在不同电压波动阶段下系统的运行状态与对惯性的需求如表1所示。
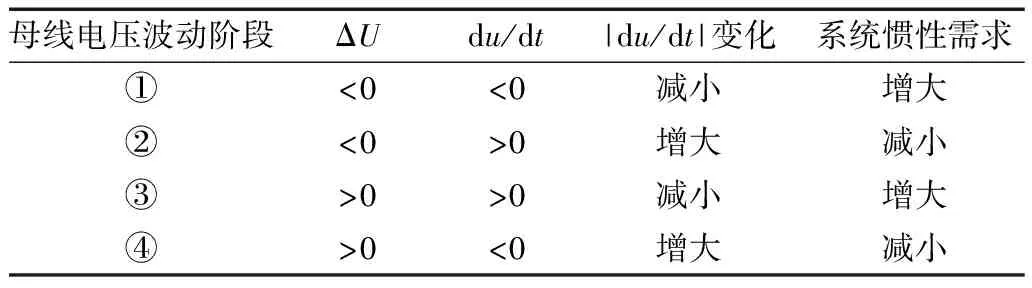
表1 不同母线电压波动阶段系统惯性需求
2.3 惯量阻尼自适应控制策略
根据J、D参数分析与表1所示不同电压波动阶段下系统的运行状态与对惯性的需求,提出了一种惯量阻尼自适应控制策略,其模型如下所示:
(8)
(9)
式中J0为稳态时的转动惯量;a为惯量调节系数;Ja为J附加动态调节部分;Ju为J附加电压调节部分;b为电压调节系数;D0为稳态时的阻尼系数;Δd为阻尼调节系数;Du为D附加电压调节部分;αJ、βJ、αd、βd分别为Ja与Du的底数系数与指数系数,αJ、αd取值应大于1;UdJ、UuJ与Udd分别为切换控制方式的电压偏差上下限阈值,可根据国家标准供电电压允许偏差规定进行选取。
如式(8)、式(9)所示,当|ΔU|小于UdJ或Udd时,为避免小干扰导致J、D频繁波动,维持J、D为稳定值。
对于J的自适应,因J与Ja取值都不应过大,故在引入电压变化率作为变量的方式上,采用具有限幅能力的反正切函数来构造方程。
1)当UdJ≤|ΔU|≤UuJ时,认为母线电压处于理想范围内,此时增大系统惯性主要用于抑制母线电压的突变。引入Ja可以提高惯量调节的灵活性,减小αJ并增大βJ可以在电压变化率较小时平缓增大惯量,减小对系统响应速度的影响,在电压变化率较大时迅速增大惯量,抑制电压变化趋势,反之则可使惯量更平稳地变化。当电压变化率趋近于0时,Ja趋近于1。
2)当|ΔU|>UuJ时,认为母线电压已经超出理想范围,但随着电压偏差增大,电压变化率逐渐减小,系统惯性下降,会导致电压偏差进一步增大。为避免电压超出允许范围,引入Ju,使J自适应可以根据电压偏差动态调节,补偿系统因电压变化率减小而缺失的惯性,阻碍电压的变化。当电压偏差趋近于0时,Ju趋近于1。
对于D的自适应,根据分析可知,随着D的增大,相同功率扰动引起的电压偏差会减小,故当|ΔU|≥Udd时,引入Du作为Δd的修正量,可以在提高阻尼调节灵活性的同时,随着电压偏差变化动态调节D的大小,发挥D减小电压偏差的作用。当电压偏差趋近于0时,Du趋近于1。
3 小信号稳定性分析
为验证应用惯量阻尼自适应VDCG控制下系统运行的稳定性以及惯量阻尼对于系统稳定运行的影响,建立附加储能单元与负载的直流微网系统的小信号模型,并对其进行小信号稳定性分析。
如图1所示双向DC/DC变换器,设其占空比为d,建立双向DC/DC变换器状态空间方程,如下所示:
(10)
式中Lbat与RLbat分别为变换器的电感与电感寄生电阻;Cbat为变换器的输出电容;iLbat与ibat分别为流过电感的电流与变换器的输出电流;ubat与ubus分别为变换器输入电压与输出电压。
根据式(10)可推导得出双向DC/DC变换器小信号动态特性,如式(11)所示:
(11)
式中Gduo为变换器占空比与输出电压之间的传递函数;Giil为变换器输出电流与电感电流的传递函数;Zboo为变换器开环输出阻抗。
根据图2可推导出输出电流到电枢电动势的传递函数和电枢电动势到电枢电流的传递函数分别如式(12)和式(13)所示:
(12)
(13)
储能变换器小信号模型如图4所示。

图4 储能变换器小信号模型
根据式(11)~式(13)与图4可得控制策略下双向DC/DC变换器的闭环输出阻抗,如下所示:
(14)
式中Gid=kp+ki/s,为电流环传递函数;kp、ki分别为比例增益系数与积分时间常数。
假设负荷通过串联电感与并联电容与母线直接相连,则负荷输入阻抗为:
(15)
式中Lload与Cload分别为滤波电感与滤波电容。
微源输出阻抗即为储能系统双向DC/DC变换器的闭环输出阻抗Zboc。
根据一种改进的阻抗比判据[12]可知,只要微源与负荷阻抗比Zboc/Zdoc的Nyquist曲线不进入禁止区即可保证系统小信号的稳定性。小信号模型的仿真参数如表2所示。
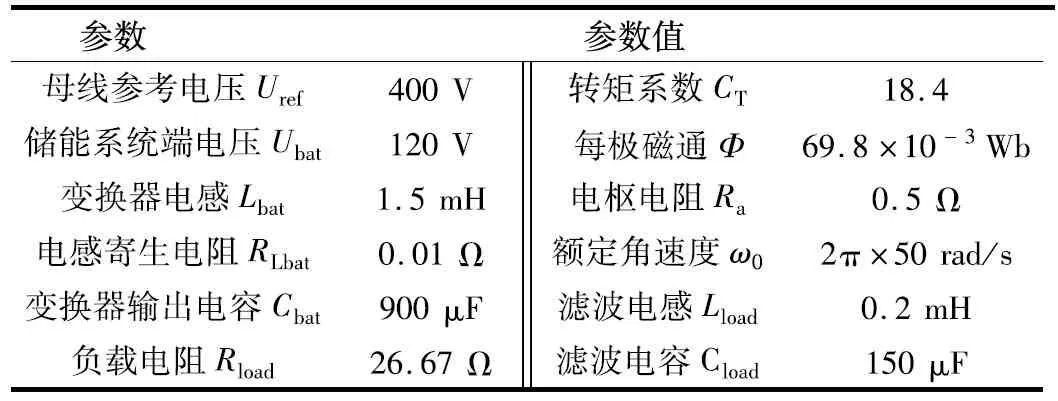
表2 小信号模型仿真参数
根据改进的阻抗比判据与仿真参数,可得到J、D的Nyquist曲线如图5所示。
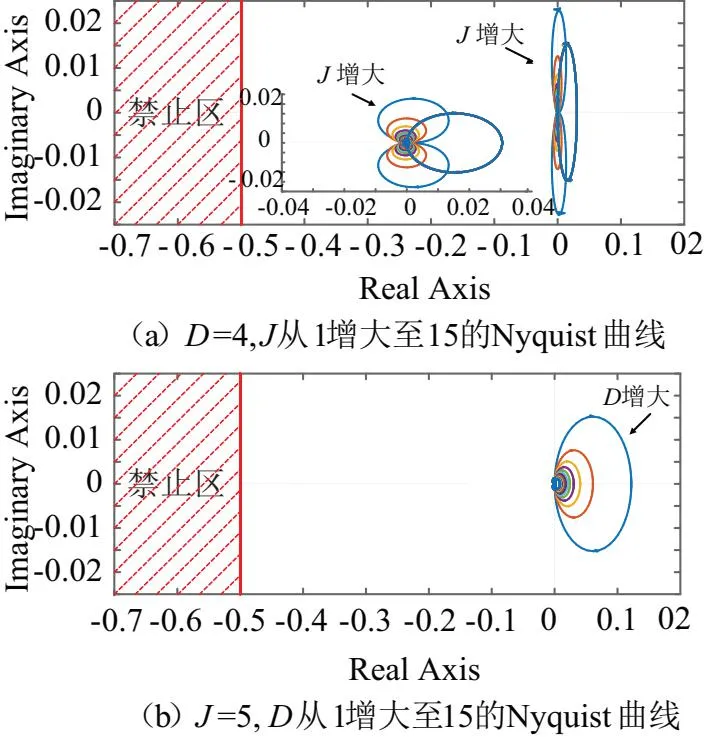
图5 微网阻抗比Nyquist曲线图
如图5(a)所示,当D值恒定,逐步增大J时,Nyquist曲线图左侧部分向内收敛,右侧部分几乎没有变化,可见增大J能够使得Nyquist曲线逐步远离禁止区,提高系统的稳定性。如图5(b)所示,当J值恒定,逐步增大D时,Nyquist曲线左侧部分几乎不变,右侧部分向内收敛,Nyquist曲线图并没有明显远离禁止区,可见增大D对于提高系统稳定性的影响不大。由图5可知,无论调整J或者D,Nyquist曲线图始终保持在禁止区外,说明在该取值下系统在稳态工作点附近能够保证直流微网小信号稳定。
4 仿真结果与分析
为验证惯量阻尼自适应VDCG控制策略的有效性,在PSCAD/EMTDC仿真软件中进行仿真验证,仿真参数如表2所示。选取J0= 5,a= 1.2,αJ= 2,βJ= 2.5,b=30,D0= 4,Δd= 1.5,αd= 1.2,βd= 0.5。
图6所示为负载消耗功率,相同功率变化下惯量阻尼自适应VDCG控制策略与恒压控制对母线电压调节能力的对比如图7所示。
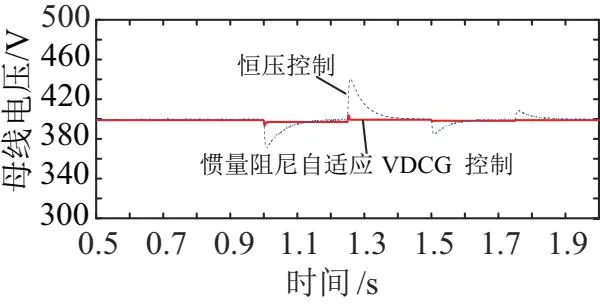
图7 母线电压波形
由图7可知,在惯量阻尼自适应VDCG控制下母线电压跌落幅度与电压恢复时间均优于恒压控制,表明该控制策略使系统获得了惯性与阻尼,可以抑制负荷突变引起的母线电压波动,维持微网稳定运行。
图8为同在图6所示功率扰动下,惯量阻尼自适应控制、J自适应控制、D自适应控制、传统惯量阻尼恒定控制以及分别计及Ja、Ju、Du的电压调节效果对比图。

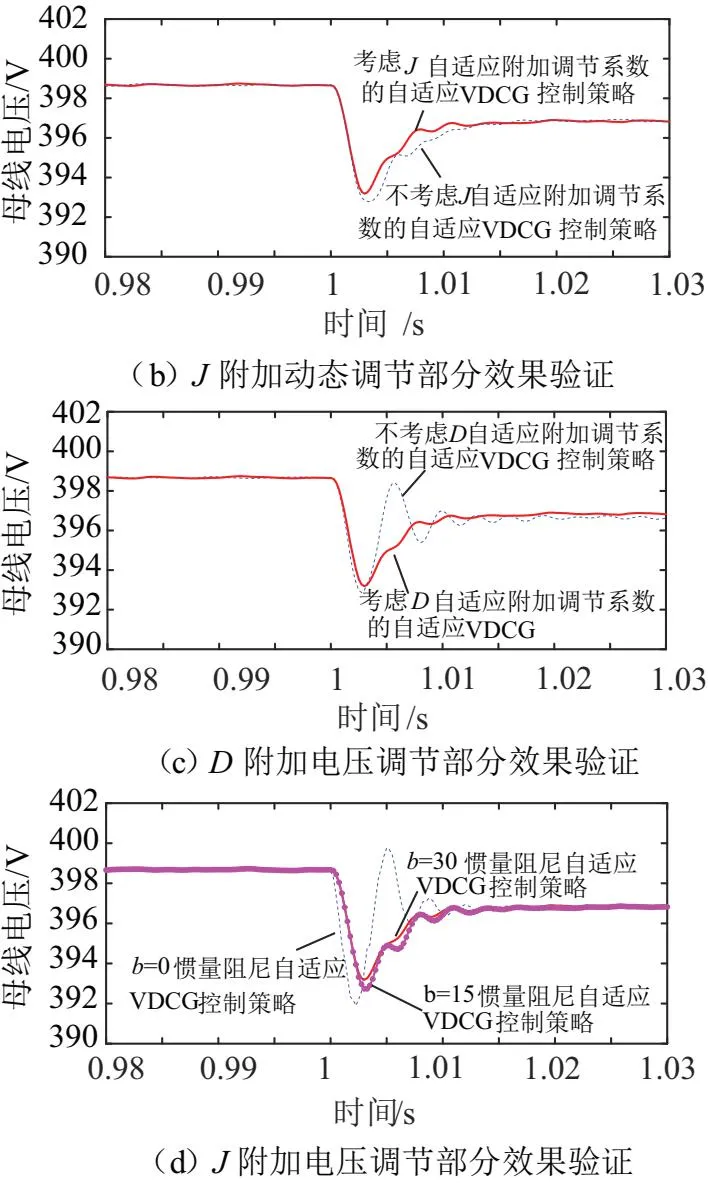
图8 各控制方式电压调节效果对比
由图8(a)可知:
1)J自适应控制延缓了系统的响应速度,减少了电压波动的次数与电压波动幅度。说明J自适应控制可增大系统惯性,起到抑制母线电压突变的作用。
2)相比J自适应控制,D自适应控制虽然不能减少电压波动次数,但可进一步减小电压波动幅度,缩短电压恢复时间。说明D自适应控制在同功率扰动下可减小电压偏差,对系统惯性的影响小于J自适应控制。
3)相比于其他三种控制方式,惯量阻尼自适应控制可使电压更加平缓地达到新的稳态,几乎没有出现波动。说明惯量阻尼自适应控制能更好地根据系统运行状态调节系统惯性,电压调节效果更好。
由图8(b)可知:考虑Ja可减小电压跌落,提高电压恢复速度。说明考虑Ja电压调节效果更好。由图8(c)可知:考虑Du可减小电压波动幅度,使电压的变化更加平缓。说明考虑Du可根据电压偏差动态调节系统阻尼,减小电压波动。由图8(d)可知:随着电压调节系数b的增大,电压跌落幅度减小。说明考虑Ju可以在电压偏差增大时提高系统惯性,补偿电压变化率减小带来的惯性损失,抑制电压进一步下降。
综上所述,相比传统的恒定惯量阻尼控制,文中所提惯量阻尼自适应控制在同功率波动下具有更好的电压调节效果,验证了所提控制策略的有效性。
5 结束语
通过分析电压波动各阶段对于系统惯性的需求及转动惯量J与阻尼系数D在虚拟直流发电机控制策略中的作用,文中提出了一种附加动态调节系数的惯量阻尼自适应控制策略,可以更好地反应系统运行状态,提高控制的灵活性,减小功率波动对电压的影响。同时建立了系统小信号模型,利用阻抗比判据分析了惯量阻尼对系统稳定性的影响。最后,利用PSCAD/EMTDC仿真软件,对惯量阻尼自适应控制等多种控制方式进行仿真对比与分析,仿真结果验证了所提惯量阻尼自适应控制策略的优越性。
猜你喜欢
现代电力(2022年2期)2022-05-23 12:46:16
电子测试(2018年15期)2018-09-26 06:01:04
中国惯性技术学报(2018年1期)2018-05-10 16:24:00
重庆理工大学学报(自然科学)(2017年5期)2017-06-29 12:01:58
通信电源技术(2016年6期)2016-04-20 06:21:15
自动化学报(2016年8期)2016-04-16 03:38:51
西北工业大学学报(2015年1期)2016-01-19 03:29:56
中北大学学报(自然科学版)(2015年6期)2015-12-02 07:01:48
哈尔滨师范大学自然科学学报(2015年6期)2015-04-23 08:20:35
电测与仪表(2015年16期)2015-04-12 00:44:34
