
基于线性自抗扰控制的单相电力电子变压器整流级控制策略
2024-01-19 08:16:58宋平岗连加巍郑雅芝龙日起杨长榄
电测与仪表 2024年1期
宋平岗,连加巍,郑雅芝,龙日起,杨长榄
(华东交通大学 电气与自动化工程学院, 南昌 330000)
0 引 言
电力电子变压器(power electronic transformer,PET)作为一种将电力电子变流技术与高频变压技术结合起来的新型能量转换系统,近年来广泛应用于电力系统的课题研究中,发展潜力巨大。其不仅可以实现传统电力变压器电压转换和能量传输的功能,还具有体积小、无污染、电压稳定可调、高低侧故障隔离以及功率可控等优点[1]。级联H桥整流器(cascaded H-bridge rectifier,CHBR)作为PET的前级系统,调制算法简单、模块化、维护简单,在工业中已取得广泛应用[2-3]。
近年来,众多学者对于CHBR型整流器的控制算法进行了深入研究,文献[4]将滑模变结构控制策略应用到PET的整流级,但滑模自身固有的高频抖振问题是实际应用中的主要障碍。文献[5]采用了一种非线性PID控制方法,该方法虽然简单通用,但对非线性函数的选取要求高,当系统的工况发生改变时,系统很容易失去稳定性。文献[6]采用了一种准PR控制技术,虽然提高了系统稳定性,抑制了网侧电流谐波,但对系统中参数的设计精度要求高。
工程控制中的被控对象大都是非线性的,并且干扰和不确定性广泛存在于被控对象和控制系统中。传统PID控制动态响应慢,当受到外部的剧烈干扰后,波动大,抗扰能力差。而自抗扰控制(active disturbance rejection control, ADRC)作为一种非线性控制系统是文献[7]中提出的,其具有响应速度快,鲁棒性强、控制精度高等优点。其核心思想是将系统转换为简单的积分串联形式,从而把实际对象和标准型的差作为广义扰动(系统的内部扰动和外部扰动)通过估计而相消,极具创造性地解决了系统的不确定性问题[8]。ADRC包括三个核心组成部分:跟踪微分器(TD)、扩张状态观测器(ESO)、非线性误差反馈控制率(SEF)[9]。因其采用的非线性函数参数数目多,调节复杂,文献[10]中通过频率尺度的概念,提出了线性自抗扰控制器结构,利用带宽整定控制器参数,提供了易于实现简化的公式,进一步推动了ADRC控制理论的发展[11]。文献[12-13]对LADRC的稳定性进行了理论分析证明。
ADRC作为一种新型的非线性控制策略,已经在众多的领域中得到应用。文献[14]将ADRC应用到光伏并网逆变器中,提高了系统的动静态性能;文献[15]提出将ADRC应用到风力发电无功补偿当中,有效抑制了系统的低频震荡;文献[16]将LADRC应用到四旋翼无人机中,提高了系统的鲁棒性。
虽然ADRC控制策略在很多领域得到应用,但尚未有相关文献将ADRC控制应用到电力电子变压器中。因此,文章以电力电子变压器的前级系统单相CHBR为研究对象,在电压环采用LADRC控制策略,通过分析单相CHBR的数学模型对控制器进行设计。结合负载平衡,负载不平衡以及负载突变时的仿真波形与传统PI控制相对比。对比分析得出:采用LADRC控制器时,系统能够取得更好的控制效果。
1 单相级联H桥整流器拓扑
1.1 单相级联H桥整流器拓扑结构
以单相三级联H桥整流器为例,其拓扑结构如图1所示。开关管由带反并联二极管的全功率型半导体开关器件构成。直流侧采用电容储能,网侧电感用于滤除交流侧电流谐波成分。其中L和Rs为网侧电感和等效电阻;Ti1、Ti2、Ti3、Ti4(i= 1,2,3)为第i个H桥的开关器件;us为网侧电压;is为网侧电流;uab为交流侧输入电压;uC1、uC2、uC3为各H桥直流侧悬浮电容C1、C2、C3的电压;R1、R2、R3为各H桥等效电阻。
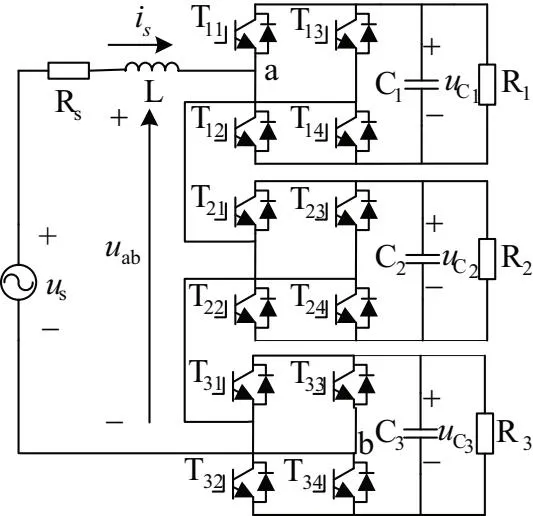
图1 单相三级联H桥整流器拓扑结构
1.2 单相级联H桥整流器数学模型
首先定义开关管的开关函数,定义第i个H桥的开关管工作状态为Si;Si一共有三种工作状态,分别为1、 0、-1。

(1)
(2)
(3)
采用二阶广义积分(SOGI)构造网侧输入电压us,电流is的虚拟正交分量[17],再经由αβ/dq坐标变换后将式(3)转化为式(4)的形式。
(4)
2 LADRC工作原理
LADRC由线性扩张状态观测器(LESO),线性误差反馈控制率(LSEF)以及扰动补偿项组成。
2.1 线性扩张状态观测器(LESO)
考虑单输入单输出的一阶系统:
式中f为系统的总扰动;u为系统控制量;b为控制器增益;ω为内部扰动;d为外部扰动;x为系统的状态变量;y为系统的输出值,假设f可微,将系统扩展为一个新的状态变量。即:
(5)
其中x1=y,x2=f;由龙贝格提出的状态观测器理论,LESO状态方程如下:
(6)

(7)

参数l1,l2可以通过系数矩阵A的特征根求得:
|sE-A| =s2+l1s+l2= (s+ω0)2
(8)
2.2 线性误差反馈控制率(LSEF)
(9)
式中b0为b的估计值。
(10)
其中x*为系统的给定参考值,Kp为比例系数。
则系统的传递函数可以写为:
因此将Kp配置到控制器的极点,即Kp=ωc;其中ωc为控制器的带宽。
一阶系统的LADRC控制框图如图2所示。
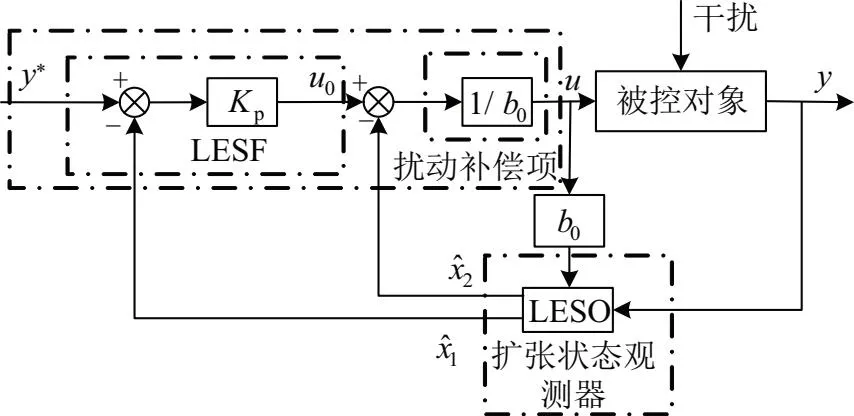
图2 一阶LADRC控制器框图
3 级联H桥整流器控制策略
3.1 LADRC控制器设计
由式(4)中的直流侧电压状态方程设计LADRC控制器。方程如下:
(11)
由式(11)可知单相级联H桥整流器为一阶被控对象,因此按照一阶LADRC进行控制器的设计。因此将式(11)改写为:
(12)
设状态变量x1=udc,x2=f,其中x2是扩展的状态变量。将式(12)按照式(5)的形式进行改写,形式如下:
(13)
则LESO的状态方程为:
(14)

控制率和LSEF按照式(9)、式(10)进行设计,此处不在过多描述。
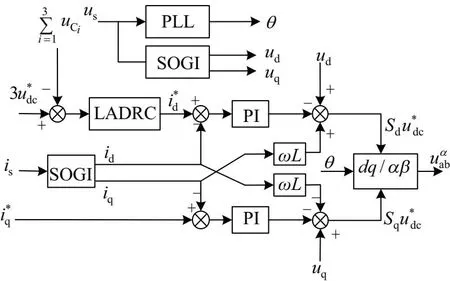
图3 dq轴电流解耦控制图
(15)
3.2 直流电容电压平衡控制
电力电子变压器中级联H桥整流级中各H桥直流侧悬浮电容电压的均衡是电力电子变压器安全稳定运行的前提;直流侧电压的不平衡很容易导致器件损坏,更严重地将造成整个系统的崩溃。因此制定相应的控制策略对级联H桥整流器至关重要。


图4 电容电压平衡控制图
4 仿真结果分析
为验证LADRC控制策略的有效性,通过Matlab/Simulink仿真软件搭建单相三级联H桥整流器仿真模型。系统仿真参数如表1所示。
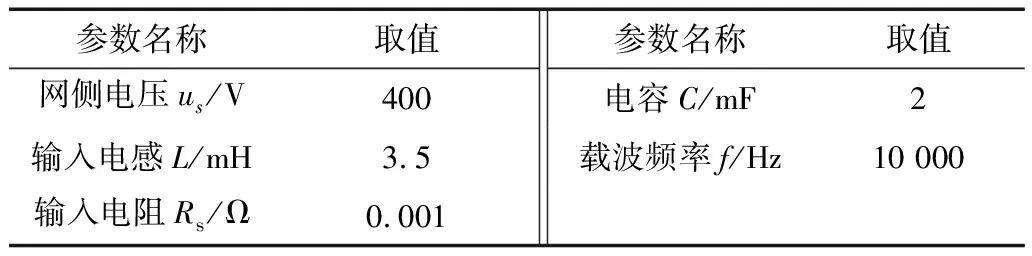
表1 三级联H桥整流器系统参数

图5为LADRC控制下系统稳态运行时网侧电流电压波形。可以看出,在该控制策略下系统网侧电流电压波形能保持同相位,即系统可以实现单位功率因数运行。图6为电压环采用LADRC控制时的网侧电流的傅里叶分析图,THD值为4.58%;图7为采用传统PI控制时网侧电流的傅里叶分析图,THD值为6.13%。经过对比可知,采用LADRC控制时,系统的THD减小1.55%,具有更好的谐波特性。
为验证LADRC的优越性,分别对直流侧负载平衡时、负载不平衡时、负载突变时的仿真结果进行分析。
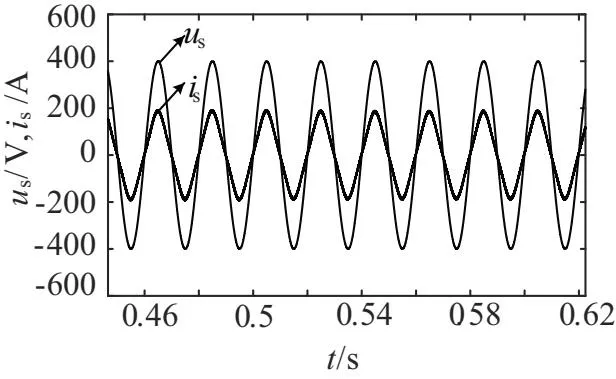
图5 稳态时网侧电流电压波形图

图6 LADRC控制时网侧电流傅里叶分析图
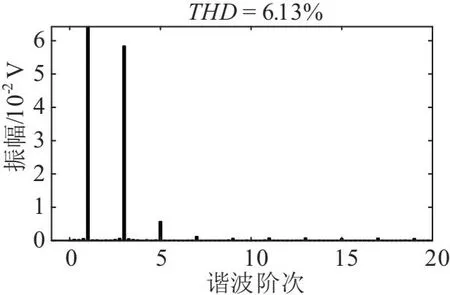
图7 PI控制时网侧电流傅里叶分析图
图8为三个H桥直流侧负载R1、R2、R3都为100 Ω时采用LADRC控制和PI控制时电容电压波形图。可知采用LADRC控制时电容电压在0.2 s时快速无超调地达到给定值。采用PI控制时电容电压在0.8 s时达到给定值。由此可以得出,采用LADRC控制时系统达到稳态的响应时间优于PI控制。

图8 负载平衡时两种控制策略对比图
图9和图10分别为直流侧负载不平衡时LADRC控制以及PI控制时电容电压仿真波形图。各H桥直流侧负载参数为:R1=100 Ω、R2=110 Ω、R3=115 Ω。可以看出采用LADRC控制策略时各直流侧电容电压能够在0.25 s内快速达到平衡并跟踪给定电压值。采用PI控制时各电容电压在0.5 s左右达到平衡,在0.7 s左右才能达到跟踪给定值。通过对比可知负载不平衡时采用LADRC控制策略系统的响应速度更快,抗扰动能力更强。
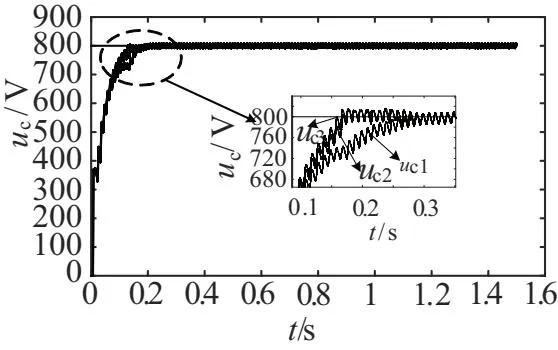
图9 LADRC控制负载不平衡电容电压波形图
图11和图12为直流侧负载在1 s时发生突变时采用LADRC控制和PI控制各H桥电容电压波形图。各单元模块负载在100 Ω的基础上突变值为R1= 120 Ω、R2=180 Ω、R3= 220 Ω,从图中可知采用LADRC控制策略当负载突变时,各直流侧电容电压能够在1.2 s恢复平衡,突变后的电压幅值和相位波动很小。采用PI控制时各电容电压在1.42 s秒左右才恢复平衡,突变后的电压相位和幅值波动较大。通过对比可知负载突变时采用LADRC控制策略系统的扰动能力更强,性能更优越。
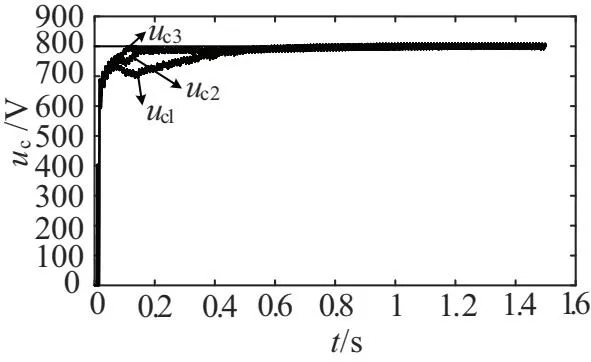
图10 PI控制负载不平衡电容电压波形图
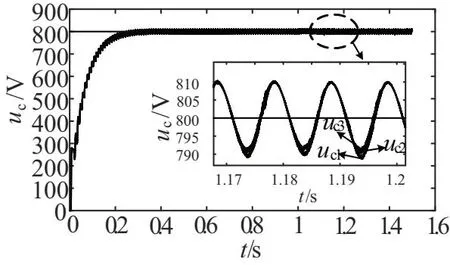
图11 LADRC控制负载突变电容电压波形图
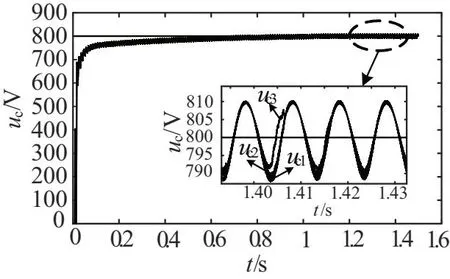
图12 PI控制负载突变电容电压波形图
5 结束语
文章通过建立分析电力电子变压器整流级的拓扑结构和数学模型,提出了一种基于线性自抗扰控制的电压环控制策略,并与传统PI控制策略相对比。对比仿真得出如下结论:
1) 采用LADRC控制的电力电子变压器整流级系统网侧电流具有更小的THD值;
2)该控制策略在负载平衡运行状态下,能够快速达到平衡并跟踪系统给定值,响应速度更快;
3)在负载不平衡和突变时具有良好的抗扰动能力,能够使电力电子变压器更高效、更稳定地运行。
猜你喜欢
电器与能效管理技术(2024年12期)2024-01-02 00:00:00
中学生数理化·八年级物理人教版(2021年9期)2021-11-20 06:00:28
攀枝花学院学报(2021年5期)2021-10-19 02:52:58
科学家(2021年24期)2021-04-25 17:55:12
大学物理(2021年2期)2021-01-25 03:26:18
通信电源技术(2016年4期)2016-04-04 02:57:16
通信电源技术(2016年4期)2016-04-04 02:57:12
电源技术(2015年1期)2015-08-22 11:16:26
电测与仪表(2015年11期)2015-04-09 11:46:34
电测与仪表(2015年12期)2015-04-09 11:44:44
