
装船设备空气噪声测量不确定度的评定
2024-01-19 03:08钱文孙成周兆逊开剑高欢
环境技术 2023年12期
钱文,孙成,周兆逊,开剑,高欢
(1.中国船舶集团有限公司第七二三研究所,扬州 225001;2.中国船舶工业电工电子设备环境与可靠性试验检测中心,扬州 225001)
引言
测量不确定度存在于一个完整的测量过程中,人员、机器、材料、方法模型、环境、抽样、数据审查、试样配置等环节都会产生测量不确定度。测量不确定度决定了测量结果的可用性,用于判断测量结果的可靠性程度,在合理评定前提下,测量不确定度越小,水平越高。
CNAS-CL01:2008 与RB/T214-2017 都对测量不确定度提出了相同的要求,不仅校准实验室,检测实验室也要识别检测过程中不确定度的贡献。CNASCL01-G003:2021 对测量不确定度的要求进行了细化,对校准实验室提出了应评定所有校准结果不确定度的要求,对检测实验室提出了应评定以数值表示测量结果的测量不确定度的要求,除此之外,校准和检测实验室还应在校准报告或检测报告中体现校准或检测结果的测量不确定度。测量结果不确定度的正确评定与应用能够减少实验室和客户对结果误判的风险,同时检测实验室报告测量不确定度还有以下优点:用于质量监控活动中两个测量结果的比较、方便客户判断测量结果是否适用、减少重复检测、评价测量方法便于改进、不需一一征求客户是否需要、用于客户评估测量不确定度。
装船设备空气噪声测量结果以数值表示,经常会出现测量结果与规范限值较为接近的情况,这时就要考虑测量结果的不确定度直接影响,要正确评定噪声测量结果的不确定度,然后根据实验室体系文件规定的判定规则,作出正确的接收与拒绝判决。
1 测量方法概述
1.1 测量依据
GJB 4058-2000、GJB 763.5A-2020。
1.2 测量仪器
传声器、前置放大器、动态信号测试分析系统,各系统连接方式详见图1。

图1 系统连接图
1.3 测量场地
室内或室外开阔场地,半消声室。
1.4 测量原理
将受试设备安装在除地面外无反射条件的场所,依据标准的要求在受试设备的测量表面上布置5 个测点,测量表面与基准体各对应面平行且距离d 取1 m,测点布置如图2 所示。受试设备根据试验大纲要求的额定工况运行,测量人员根据受试设备运行情况,调试测量系统,将信噪比调整到最佳位置。在测量系统无异常的情况下,操作测量分析设备,分别记录每个测点的背景噪声级和设备运转时的声压级。
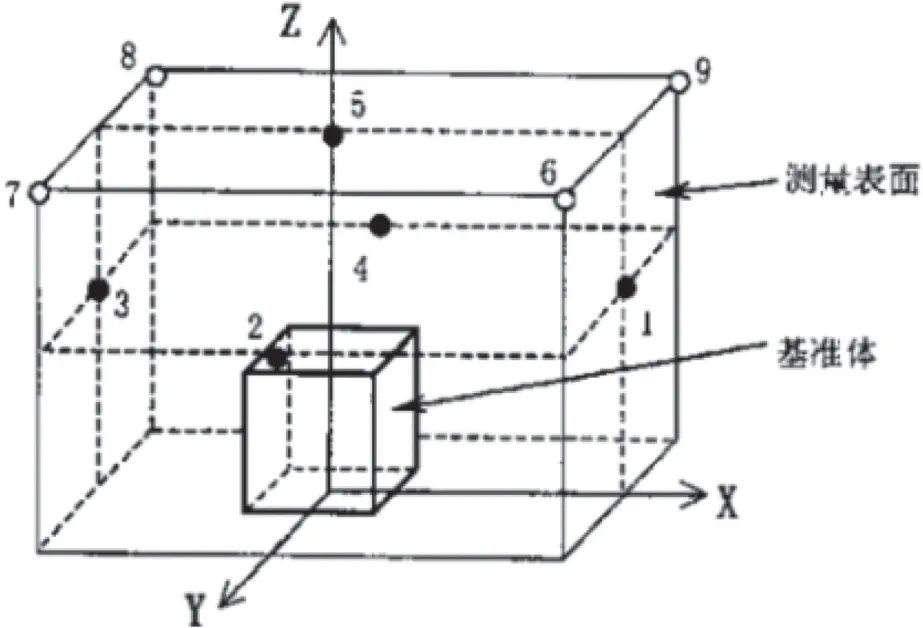
图2 测点布置图
标准中规定背景噪声的声级应比受试设备运转时的噪声级低10 dB 以上,若差值小于10 dB 时,应对背景噪声修正。所以单个测点的背景噪声级和设备运转噪声级差值小于10 dB 时,应修正测量值,经修正后的单点声压级即为输入量。修正值产生的误差为已知的系统误差,不参与不确定度的评定。
2 建立包括输入量在内的评定合成标准不确定的测量模型
受试设备空气噪声测量结果的数学公式为:
假设测点个数为5,单点噪声级修正值Lpi为输入量xi,受试设备表面平均声压级为输出量y,测量模型可以简化为:
式中:
x1~x5—测点1 ~测点5 经修正后的声压级,dB;
y—受试设备表面平均声压级,dB。
3 不确定度的主要来源和分析
标准不确定度分为A 类标准不确定度和B 类标准不确定度。A 类标准不确定度是指测量重复性或复现性引入的标准偏差;B 类标准不确定度是指校准结果、设备最大允差、仪器分辨力、数值修约、测量结果的重复性r或复性限R 带来的标准不确定度。
根据测量模型,可以看出A 类标准不确定度是对输入量重复测量产生的不确定度。通过系统连接图,可以分析出B 类标准不确定度为传声器频率响应误差、前置放大器频率响应误差和传输损失偏差、动态信号测试分析系统幅值示值误差和频率示值误差。
因此标准不确定度的主要来源有:
1)输入量xi重复测量产生的标准不确定度分量u1;
2)传声器频率响应误差产生的标准不确定度分量u2;
3)前置放大器频率响应误差产生的标准不确定度分量u3;
4)前置放大器传输损失偏差产生的标准不确定度分量u4;
5)动态信号测试分析系统幅值示值误差产生的不确定度分量u5;
6)动态信号测试分析系统频率示值误差产生的不确定度分量u6。
4 标准不确定度的评定方法
4.1 标准不确定度A 类评定
1)标准偏差法
对同一输入量xi作n 次测量,表征测量结果分散性的参数s 即为标准偏差,也就是测量结果的A 类标准不确定度,用贝塞尔公式计算:
式中:
s—标准偏差;
xi—第i 次独立观测值;
n—独立观测次数(n ≥10);
x —n 次独立观测值的算数平均值。
在实际应用时应注意贝塞尔公式只用于计算单次测量的标准偏差,此时对应的A 类标准不确定度uxi=s。如不确定度评定过程中,输入量xi以m 次测量的平均值作为测量结果的估计值时,平均值的标准偏差计算公式为:,此时由引入的A 类标准不确定的uxi=。
另外,还要注意,在运用贝塞尔公式计算标准偏差前,应使用莱茵达法剔除n 次测量数据中的离群值,这种方法也叫三倍标准偏差法。首先计算求得n 次测量数据的平均值与单次测量的标准偏差s,然后将n 次的测量数据分别与3 倍的标准偏差(3s)进行比较,如发现有大于3s 的测量值,则剔除,反之,则保留。三倍标准偏差法一般应用于n ≥10 大样本的测定。
2)合成样本标准偏差法
如果测量次数n 较少,为了提高不确定度评定结果的可靠性,就要用到合成样本标准偏差sp来表示A 类不确定度。合成样本标准差的概念为对输入量x 进行了n次测量,得到xi,其平均值为,标准偏差为s;如果有m 组这样的测量组合,每组的标准偏差即为sj,则可以计算合成样本标准偏差,计算公式如下:
但要注意的是,合成样本标准偏差sp只有在被测量值是同类型且较为稳定,m 组测量组合的标准偏差sj较为接近相差不大时,才能使用如果观察发现各测量组标准偏差sj中有相差较大的变量,使用sp前需要验证系统是否稳定,验证方法如下:
首先计算系统标准差(s)和(s)的估计值估(s),计算公式如下:
式中:
s —标准偏差的平均值;
m—测量组列数;
sj—第i 组测量标准偏差;
n—测量列的次数。
4.2 标准不确定度B 类评定
4.2.1 B 类不确定度评定流程
B 类不确定度主要来源于测量人员读数误偏差,仪器设备分辨率、灵敏度、稳定性、校准不确定度误差,标准物质纯度、稳定性误差,测量模型方法的准确程度,环境条件的影响,取样代表性不够,数值修约等等。B类评定的流程如图3 所示。
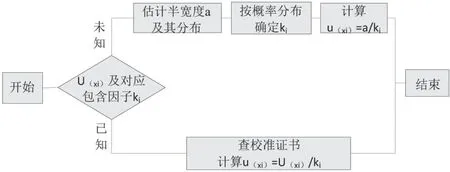
图3 B 类不确定度评定流程图
4.2.2 B 类不确定度常用的评定方法
1)校准结果带来的不确定度
如果校准证书中给出了仪器设备的扩展不确定度U,包含因子k,由此引入的标准不确定度为:
2)仪器设备的最大允差带来的不确定度
如仪器设备的最大允差为±Δ,半宽度为Δ,允差在区间(-Δ ∽+Δ)的概率是均匀的,服从矩形分布,则仪器设备的最大允差带来的标准不确定度为:
3)仪器设备的分辨力带来的不确定度
4)量值数值修约带来的不确定度
5)已知测量结果的重复性限r 和再现性限R
若检测标准中给出了测量结果的重复性限r,在相同的测量条件下,进行两次测量,两次测量的差值应符合重复性限r 的要求,即:
若检测标准中给出了测量结果的再现性限R,则单次测量带来的标准不确定度为:
n 次测量的平均值的标准不确定度为:
6)常用概率分布类型

表1 常用分布与包含因子k、uxi 的关系
a 为测量值概率分布区间半宽,在无法确定B 类来源的分布类型时,考虑从严估计,均可估计为均匀分布。
5 各分量标准不确定度的评定计算
5.1 输入量重复测量引入的标准不确定度分量u1
为了评定u1,对受试设备进行了10 次独立测量,得到了输入量xi1,xi2,…xi10,其平均值为,试验标准偏差为s。测点1 ~测点5 分别记录设备各测量面的声压级,由于各测量面噪声辐射指向性的差异,5 个测点之间无相关性,因此将10 次测量数据分为m 组(m=5)这样的测量组合,然后合成样品标准偏差。测量数据及计算结果如表2 所示。
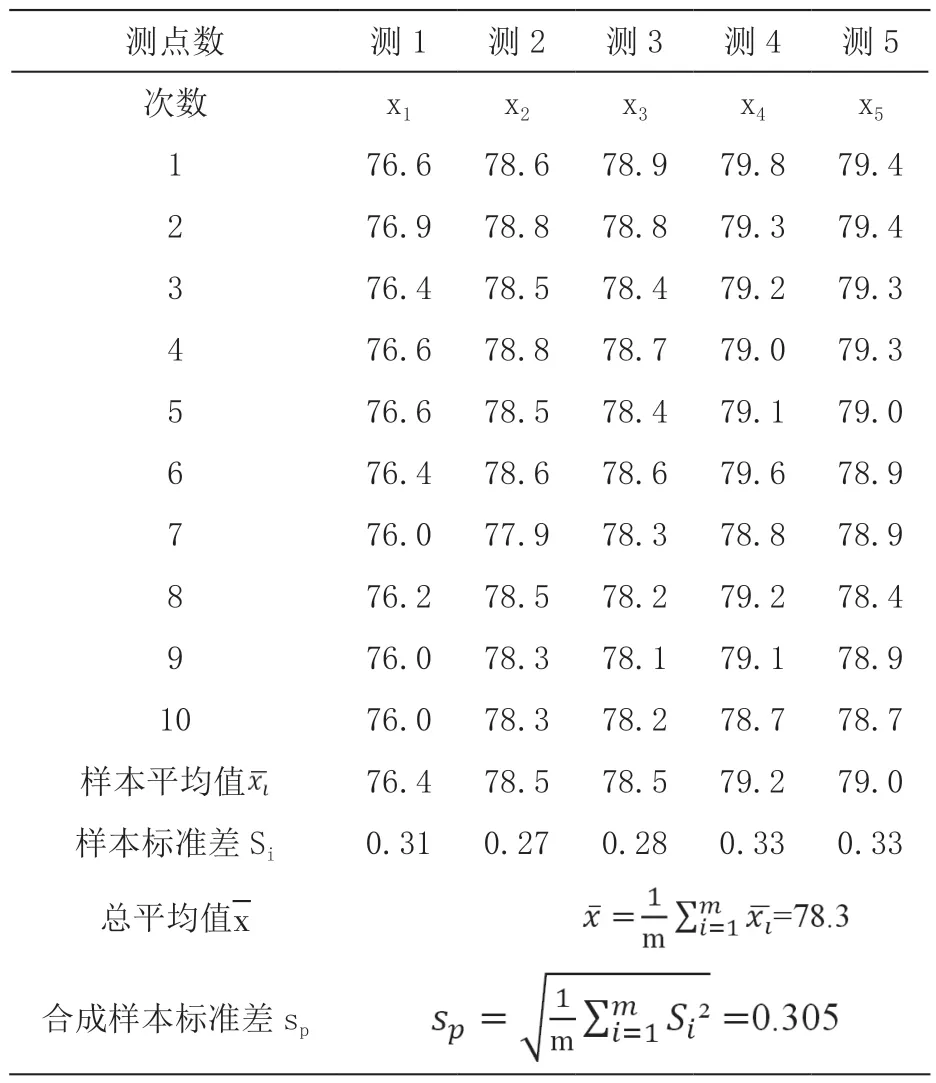
表2 受试设备测量重复性评定数据 单位dB
根据式(6)、(7)分别计算,(s)=0.028 3,估(s)=0.030 6,结果(s)<估(s),说明测量状态稳定,sp可以使用,则:
5.2 传声器频率响应误差引入的不确定度分量u2
查传声器校准证书,传声器扩展不确定度,见表3。
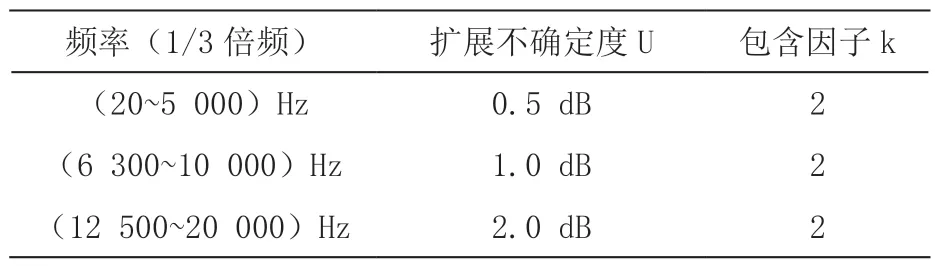
表3 传声器频率响应校准不确定度
由于校准使用的计量标准器具的不确定度是随频率变化的变量,根据量值溯源由上而下的要求,传声器频率响应误差校准带来的扩展不确定度也是随频率变化的变量,所以在计算传声器频率响应误差带来的标准不确定度时,也要分频段给出评定结果,见表4。
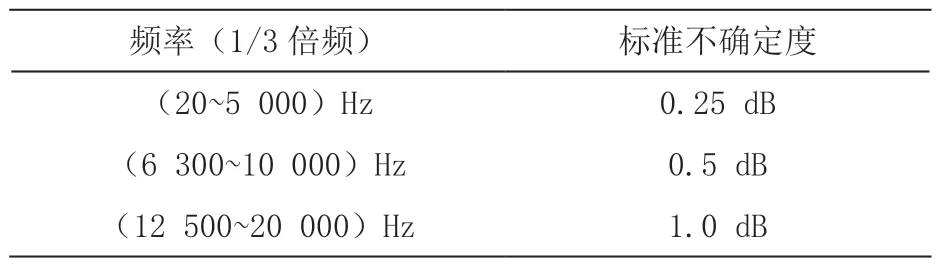
表4 传声器频率响应标准不确定度
5.3 前置放大器频率响应误差引入的不确定度分量u3
查校准证书,前置放大器频率响应示值误差校准的扩展不确定度U=0.2 dB,k=2,则前置放大器频率响应示值误差带来的标准不确定度为:
5.4 前置放大器传输损失偏差引入的不确定度分量u4
查校准证书,前置放大器传输损失偏差的扩展不确定度U=0.1 dB,k=2,则前置放大器传输损失偏差带来的标准不确定度为:
5.5 动态信号测试分析系统幅值示值误差引入的不确定度分量u5
动态信号测试分析系统频谱幅值示值误差为0.24 %,其概率分布服从均匀分布,则动态信号测试分析系统幅值示值误差带来的标准不确定度为:
5.6 动态信号测试分析系统频率示值误差引入的不确定度分量u6
动态信号测试分析系统频率示值误差为0.001 %,其概率分布服从均匀分布,则动态信号测试分析系统频率示值误差带来的标准不确定度为:
由于标准不确定度分量u6远远小于最大不确定度分量的十分之一,在合成标准不确定度中的贡献可以忽略,因此u6不参与合成标准不确定度的评定。
6 合成标准不确定度的评定
将上述参与合成标准不确定度评定的分量列于表5中。
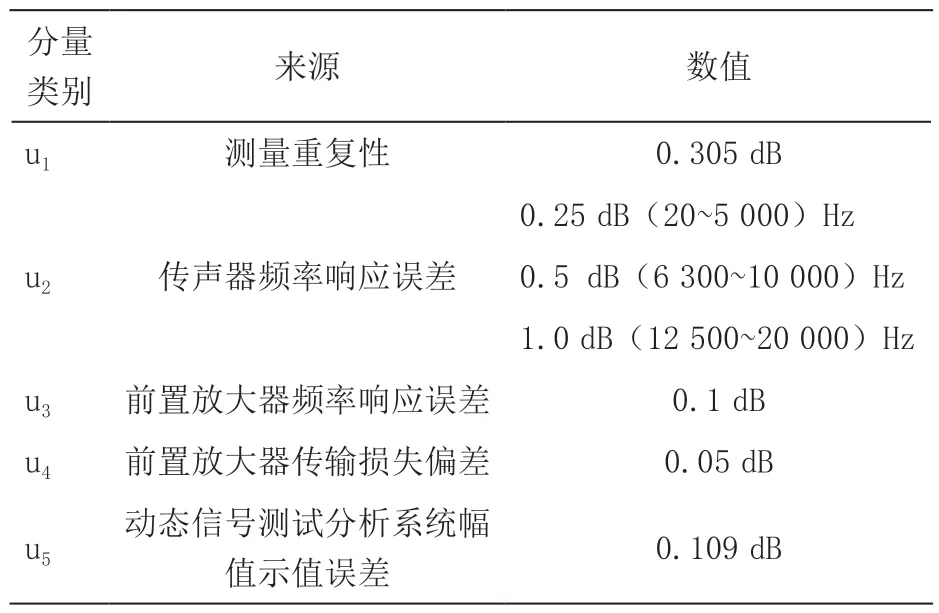
表5 标准不确定度分量表
由于输入量x1、x2、…x5是独立不相关的,输出量y与输入量xi之间的关系为对数和的数学模型,所以合成标准不确定度计算公式为:
计算结果如表6 所示。

表6 合成标准不确定度uc(y)评定结果
7 扩展不确定度的评定
扩展不确定度评定时需要考虑是否需要给出Up,无需给出Up时,包含因子k 一般取2~3,U=k×uc(y)。如果需要给出Up 或要了解不确定度的可靠程度时,且标准不确定度uc(y)近似正态分布,先计算有效自由度Ueff;再选取置信概率P(一般为0.95 或0.99),根据Ueff和P查分布临界值tp(u),得到包含因子kp= tp(u),最后计算Up= kp×uc(y)。
JJF 1059.1-2012 修订内容中弱化了给出有效自由度的要求,一般情况下,只需要给出测量结果的扩展不确定度U,并注明包含因子k 即可。
评定本次测量结果的扩展不确定度,取包含因子k=2,则U=k×uc(y),分段计算结果如表7 。
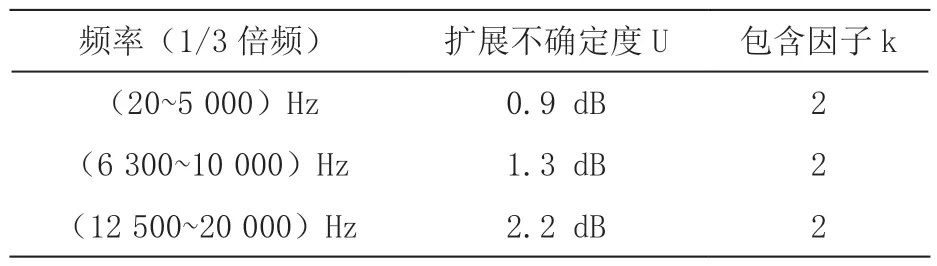
表7 扩展不确定度U 评定结果
8 结果报告
报告测量结果的扩展不确定度时,表示形式为:测量结果扩展不确定度(单位),包含因子k 为2,对应的置信水平p 近似为95 %。
根据扩展不确定度分段评定的结果,受试设备空气噪声测量不确定度分以下三种形式报告与表示:
1)若测量频率在(20~5 000)Hz 范围内,受试设备空气噪声=(78.4±0.9)dB,k=2;
2)若测量频率在(20~10000)Hz 范围内,受试设备空气噪声=(78.4±1.3)dB,k=2;
3)若测量频率在(20~200000)Hz 范围内,受试设备空气噪声=(78.4±2.2)dB,k=2。
9 总结
本文采用GUM 法评定了受试设备空气噪声测量结果的不确定度,是基于线性的测量模型或可以转换为线性模型、输入量概率分布可假设为对称分布、输出量概率分布可假设为对称分布或t 分布的三个前提下,若以上条件均不满足时,GUM 法就不适用了,宜采用蒙特卡洛法(MCM)来评定,MCM 法需要利用大量仿真数据特征值进行计算机编程,对评定人员的要求较高。
受试设备空气噪声测量不确定度评定后,实验室在作出与标准符合性声明时,是应用简单接受(风险共担)判定规则,或是应用考虑不确定度影响的判定规则,这些都需要在管理体系文件中以文件化的形式规定。必要时修改委托书、合同评审记录与报告模板,增加相应的判定规则方面的内容。
猜你喜欢
科学技术创新(2021年19期)2021-07-16
商品与质量(2020年38期)2020-11-06
中国保健营养(2019年1期)2019-10-21
消费导刊(2018年8期)2018-05-25
制造技术与机床(2017年8期)2017-11-27
科技创新与应用(2017年1期)2017-05-11
光学精密工程(2016年5期)2016-11-07
科技与创新(2016年10期)2016-05-28
电测与仪表(2015年7期)2015-04-09
测绘通报(2014年3期)2014-08-16
