考虑频率响应的虚拟同步发电机暂态同步策略
2024-01-18 01:52于晶荣王益硕孙文邱均成
电机与控制学报 2023年12期
于晶荣, 王益硕, 孙文, 邱均成
(1.中南大学 自动化学院,湖南 长沙 410083; 2.国网湖南省电力有限公司邵阳供电分公司,湖南 邵阳 422502)
0 引 言
近年来,并网逆变器作为分布式能源与电网之间的接口,被广泛地应用于电力系统[1]。但逆变器通常缺乏传统同步发电机(synchronous generator,SG)固有的惯量与阻尼特性,在面临传输线路故障等问题时,会表现出更为快速而复杂的暂态过程[2-3]。为了模拟SG的运行特性,同时为电网提供电压与频率支持,虚拟同步发电机(virtual synchronous generator,VSG)成为了极富前景的控制方法[4-5]。
VSG采用功率环与大电网同步,是典型的二阶系统,在改善频率动态响应的同时,也应兼顾功率的快速响应[6-7]。为了解决功频响应与参数设计之间的矛盾,常用的方法是降阶控制[8-9]与自适应惯性控制[10-13]。这些方法从小信号角度来分析优化VSG的动态过程与稳定性,充分利用了平衡点附近的线性化模型。
然而,在传输线路故障、电压暂降等大干扰的工况下,小信号方法不再适用,更应关注VSG与电网保持同步的能力[13-15]。这时,根据VSG受扰后是否存在稳定工作点,同步问题可分为两类。其中,由于II型暂态问题没有任何平衡点,需要配合故障清除才能避免失步问题[16-17]。I型暂态问题有2个平衡点,文献[18]指出,非惯性系统(如下垂控制或功率同步控制)在该暂态问题下的暂态响应一定能与电网保持同步。此外,文献[19]采用李雅普诺夫直接法,证明了随着阻尼系数的增加,系统的吸引域会扩大,其暂态稳定性也会改善。VSG则在非惯性系统的基础上加入积分环节,引入的虚拟惯量极大地提高了系统的频率稳定性,但由于缺乏阻尼,VSG将面临失稳的风险[20]。
目前,提高VSG暂态稳定性的方法有两大类,一是调节功率参考,二是修改控制器。
电力系统暂态失稳的根本原因是有功参考与输出的不平衡[15],因此调节功率参考是最直接的提高暂态稳定性的方法。文献[19]利用功角曲线对无功控制进行定性分析,表明无功下垂系数会恶化VSG的暂态稳定性,因此在故障期间提高无功或电压幅值参考可以补偿电压降,扩大暂态稳定裕度[21-22]。降低有功参考来减小加速面积、增大减速面积的方法同样有效[23]。文献[24]为使VSG始终存在平衡点,引入参考功角概念,本质上是通过调整有功参考实现功角跟踪。这些方法均在一定程度上减小了Ⅱ型暂态问题的发生概率,但不可避免地降低了VSG的功率输出能力,同时由于难以准确量化参考调节量,只能在趋势上预防VSG发生失步。
修改控制器参数或控制结构将进一步解决上述问题。传统VSG的暂态稳定性与动态响应之间存在矛盾,因此惯性与阻尼特性需要权衡设计[25]。文献[26-28]采用额外锁相环检测电网频率,并前馈到有功参考,在不影响控制器参数设计的情况下等效增大VSG的暂态阻尼。文献[29]前馈的是频率微分,可以等效增大暂态惯性。文献[30]基于SG同步电抗的不对称特性,设计了一种不对称虚拟暂态阻抗控制。文献[31-32]则提出加速阶段大惯量、减速阶段小惯量的交替惯量控制,使VSG在暂态期间有近似一阶的动态响应。与小扰动类似,控制器参数的自适应设计在提高VSG暂态稳定性方面具有良好的应用前景。
尽管两类方案在一定程度上能避免暂态失稳问题,但并不能彻底消除VSG的失步风险,更无法促进已失稳系统的暂态恢复。文献[33]利用频率偏差、功率偏差及其变化率等信号对VSG的正、负反馈区域进行判断,发现VSG一旦进入正反馈模式,就必然导致系统不稳定。为恢复稳定,该方法自适应地将控制器参数调节为负惯量与负阻尼,避免VSG的功角发散。但是,功率变化率作为功率的微分,会引入噪声干扰模式切换控制,从而容易造成正负反馈区间的误判。此外,该方法无法同时兼顾频率响应与暂态同步稳定性要求,即使系统最终能够恢复平衡,也要经历一个长期的动态过程,这对电力系统的安全运行是不利的。
为改进上述方法的不足之处,本文提出一种考虑频率响应特性的自适应暂态同步策略,确保VSG在失稳后能迅速回到稳定工作点。该策略采用功角与功率偏差来判断系统是否进入失稳区间,避免了功率微分的极性判定,消除了噪声的影响。设置了频率偏差与频率变化率(the rate of change of frequency,RoCoF)的阈值条件,根据频率极限自适应地调整惯量与阻尼参数,使VSG不仅满足暂态同步稳定性,而且实现快速频率响应。本策略能够根据电网规约要求自主调整频率阈值。此外,通过等面积定则验证了系统稳定性,最后在MATLAB/Simulink平台上搭建系统模型,验证了所提策略的可行性。
1 系统结构与暂态失稳问题
1.1 基于VSG的系统结构
VSG并网主电路拓扑如图1所示。图中:Vdc为直流侧电压;Cdc为直流侧电容。VSG交流侧的输出电压经滤波电感Lf与滤波电容Cf后连接至公共耦合点(point of common coupling,PCC),V与I为VSG输出电压与电流。Z1与Z2为两个并联的线路阻抗,Zg=Z1//Z2。Vg表示无穷大母线电压。
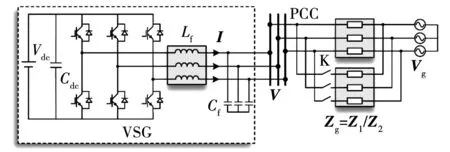
图1 VSG并网主电路拓扑Fig.1 VSG grid-connected main circuit topology
VSG的同步单元如图2所示。其中:Pref与P分别为有功功率的参考和实际输出;ω0为额定频率,稳态时等于电网频率ωg。
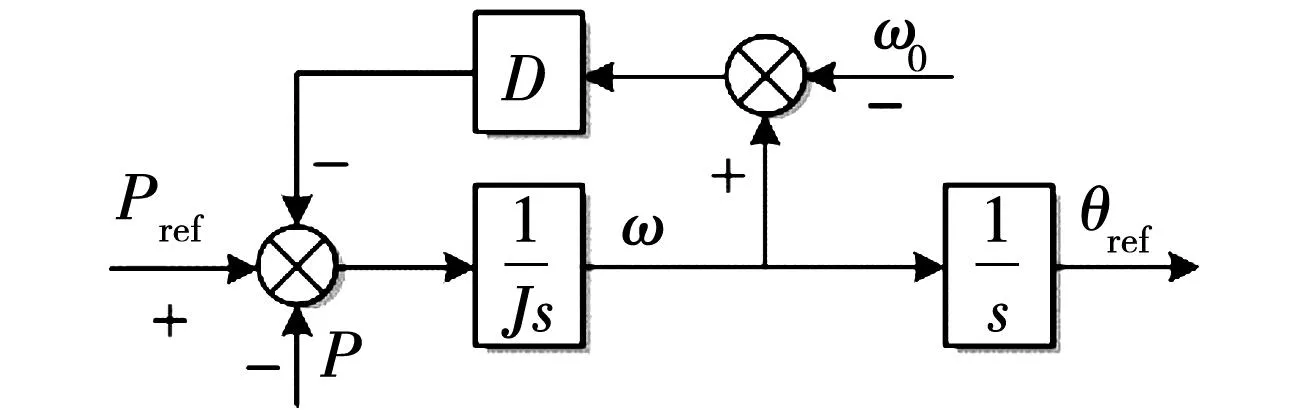
图2 VSG的同步单元Fig.2 Synchronization unit of VSG
有功控制可以模拟SG的调速器与惯量特性,即摆动方程为
Pref-P-D(ω-ω0)=Jsω。
(1)
式中:D为阻尼系数;J为虚拟惯量;ω为VSG的输出角频率;s为频域下的拉普拉斯算子。图2中θref是参考电压相位,表达式为
(2)
无功回路通常采用Q-V下垂控制,用于调节逆变器输出电压V,表达式为
V=kq(Qref-Q)+V0。
(3)
式中:kq为无功下垂系数;Qref与Q分别为无功功率的参考和实际输出;V0为系统标称电压。
系统的等效电路如图3所示。VSG被视为一个可控电压源,Zinv为电源内阻。线路阻抗通常呈高感性,可忽略线路电阻,即Zg≈jωLg=jXg。根据电路理论,VSG向电网输送的有功、无功功率分别为:
(4)
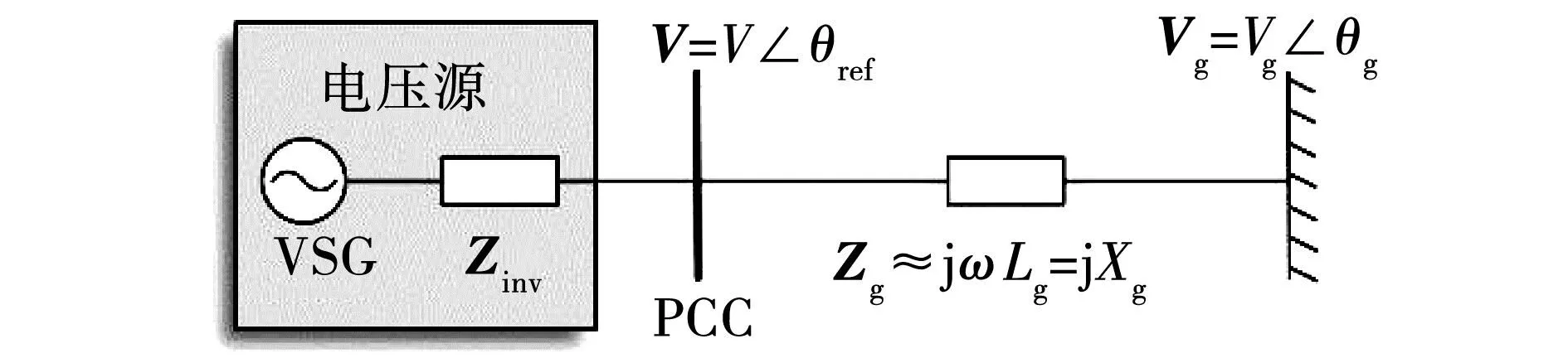
图3 系统等效电路Fig.3 System equivalent circuit
式中δ用于表示PCC电压与电网电压的相角偏差,被称为功角,它与VSG输出频率、电网频率之间的关系为
(5)
将式(4)代入式(3)中,可以求得PCC电压V与功角δ之间的关系为
(6)
联合式(4)与式(6),即可求得P关于δ的非线性关系。容易发现,P(δ)与无功回路的参数kq、V0、Qref的取值有关。
为简化分析,本文着重探讨有功回路在暂态失稳问题中的作用,暂时忽略无功回路参数设计对P(δ)特性的影响,即认为VSG输出电压幅值总能支撑PCC电压。不再详细讨论无功功率控制环。
1.2 失稳问题描述
VSG的输出功率P与功角δ之间呈正弦关系,正弦曲线的幅值为3VVg/2Xg,但这种正弦的非线性特性会给电网同步带来一些问题。通常,电网扰动可表现为阻抗突变或PCC电压骤降,这将导致功角曲线的峰值突然减小。VSG受扰前后的I型暂态功角曲线如图4所示。
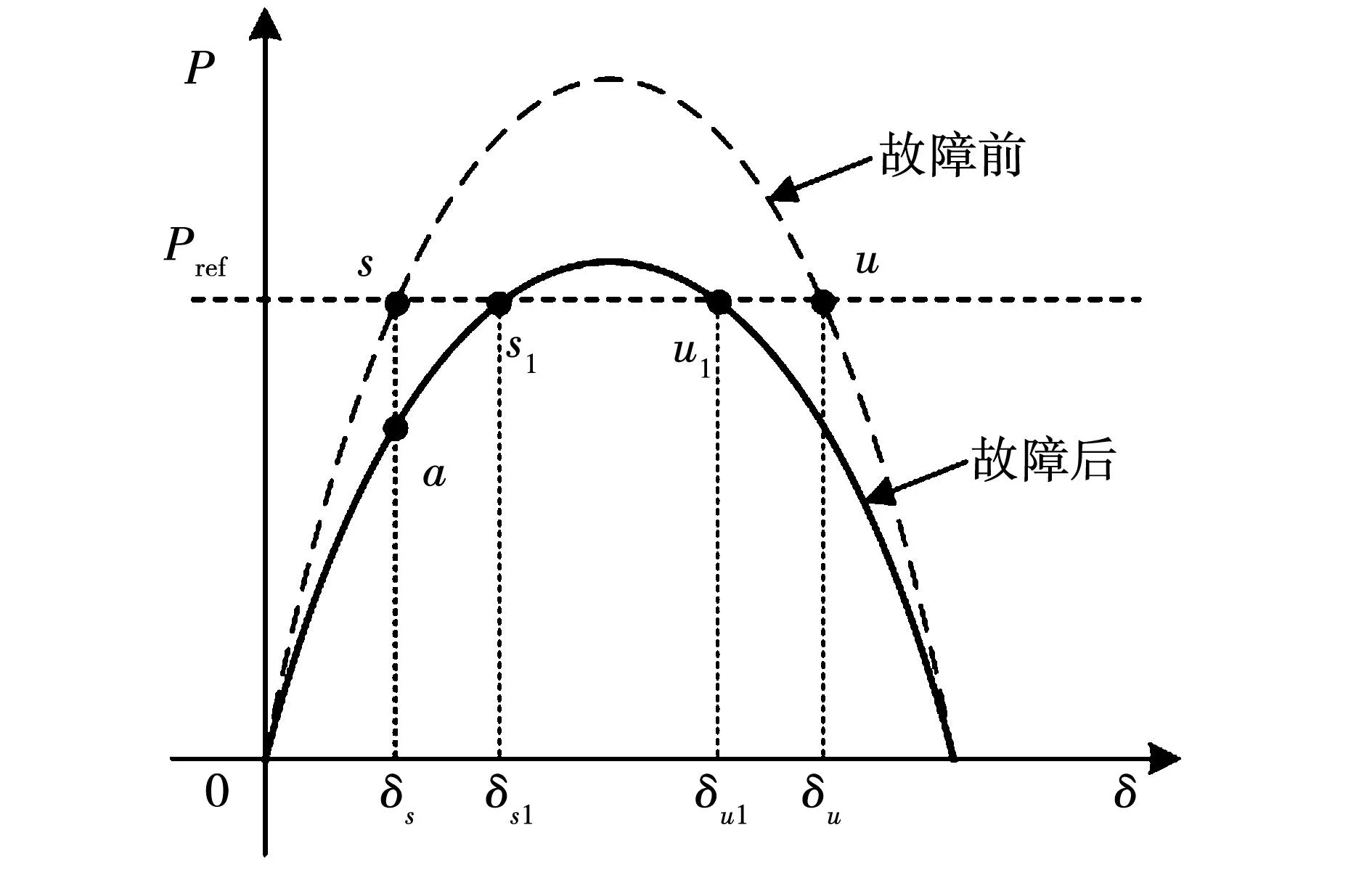
图4 Ⅰ型暂态问题的功角曲线Fig.4 Power angle curve of type-Ⅰ transient problem
扰动发生前,Pref与功角曲线交于2个平衡点,其中:s点为稳定平衡点(stable equilibrium point, SEP),u点为不稳定平衡点(unstable equilibrium point,UEP),VSG稳定运行于s点。扰动发生后,功角曲线仍与Pref有2个交点,SEP变为s1点,UEP变为u1点,由于δ无法突变,功角曲线的变化将导致VSG的输出功率发生跳变(由s点至a点)。
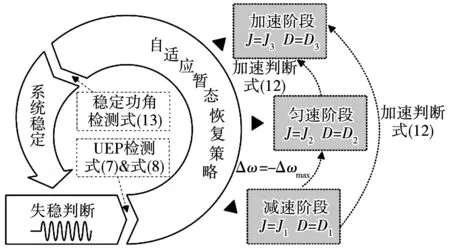
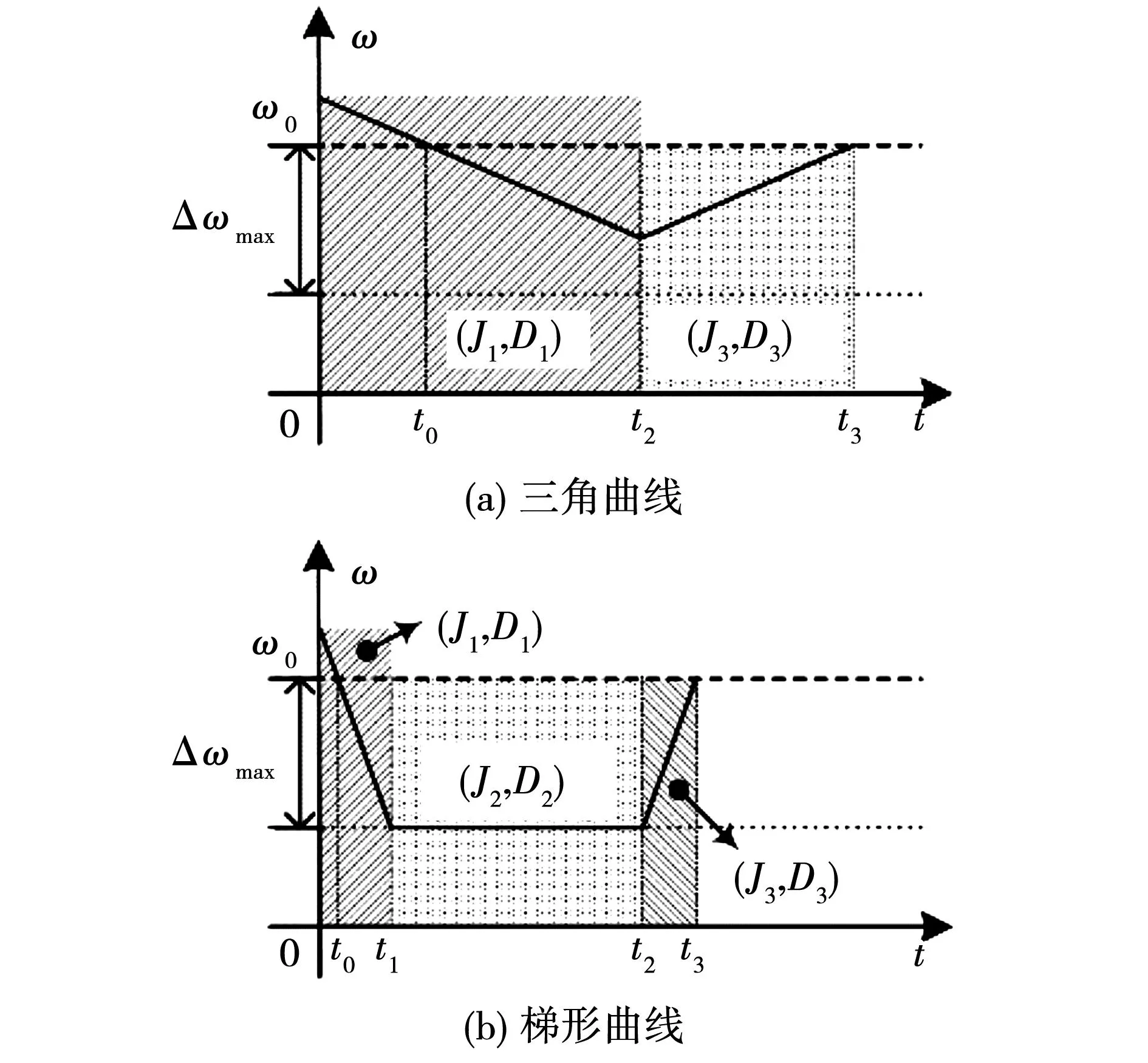
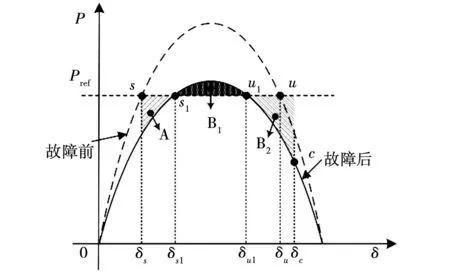
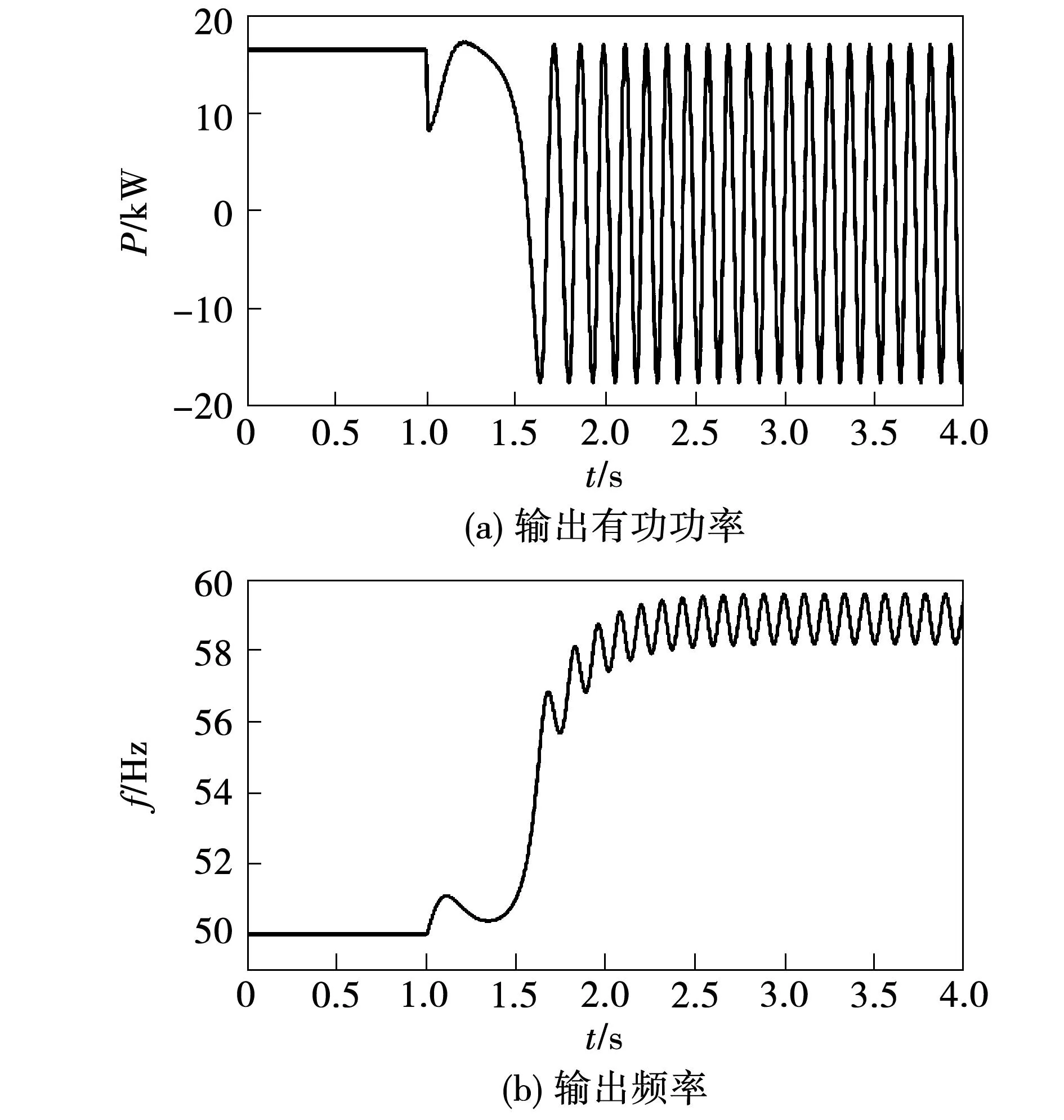
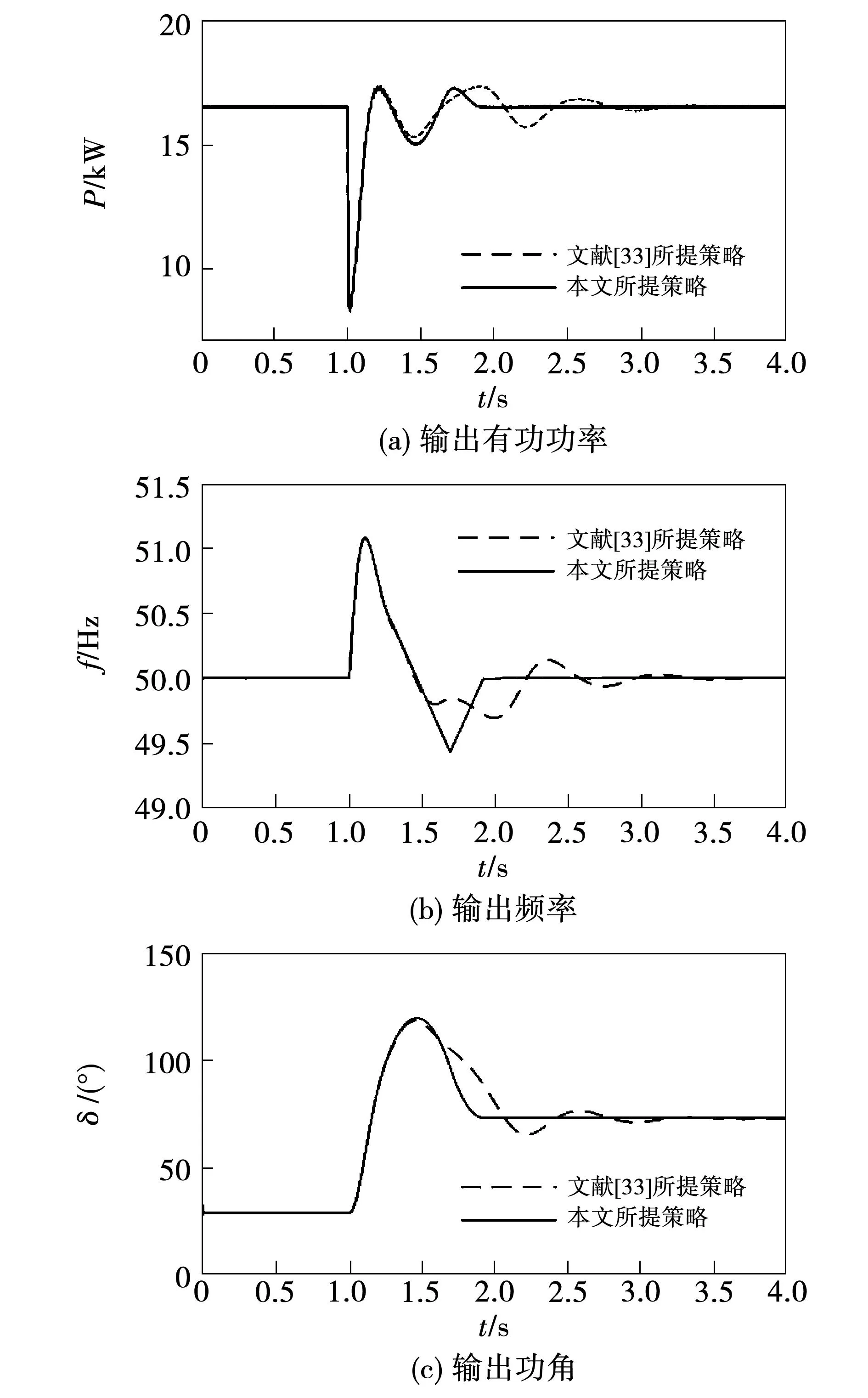
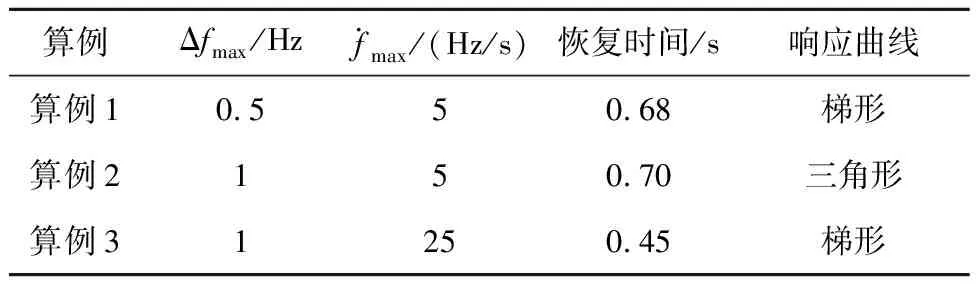
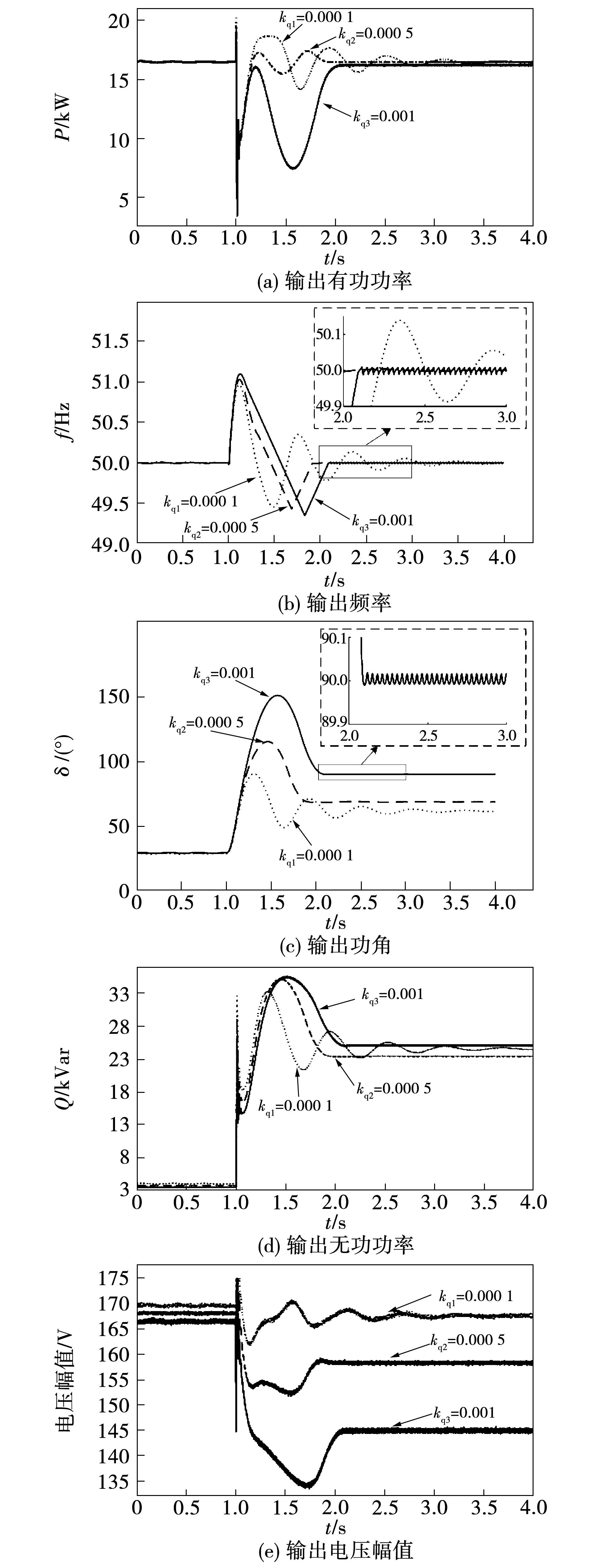
结合式(1)与式(5),当系统工作点从a点向s1点移动的过程中,Pref>P使得Jsω大于0,系统开始加速、功角变大,工作点向右移动;向右越过s1点后,Pref 相反地,如果工作点第一次右移至u1点时,频率仍大于ω0,系统会继续加速、右移并越过u1点,导致VSG的功角不断增大,很快与电网失去同步并引发振荡。 本文提出的自适应暂态同步策略的运行机制如图5所示。 图5 自适应暂态同步策略的运行机制Fig.5 Operational mechanism of adaptive transient synchronization strategy 根据1.2节分析,判断I型暂态问题是否失稳的重要条件是,系统运行工作点是否向右移动并越过UEP。此外,UEP对应的功角一定满足: (7) 工作点越过UEP后,有功功率也会低于参考,即 ΔP=Pref-P≥c1。 (8) 式中c1是根据系统稳态值整定的稍大于0的常数。因此,VSG失稳的边界条件为同时满足式(7)与式(8)。 系统越过UEP后会失稳的原因是VSG的ω不断增大。考虑到控制参数可调,改写式(1)为 (9) 式中Δω=ω-ω0。式(9)意味着修改J与D的取值即可决定dω/dt项的符号,系统加减速完全可控。 系统失稳时Δω>0,因此期望VSG能尽快减速,直到Δω=0,工作点才开始左移并逐渐稳定。同时,为了避免系统面临漫长的动态恢复过程,最理想的状态是ω以最快的速度减小,并在工作点逐渐恢复到SEP的过程中适时改变惯量与阻尼系数,变减速为加速。若控制得当,系统的功率与频率将在工作点第一次接近SEP时恰好同时平衡,VSG稳定。 在改变VSG的加减速状态时,要注意频率偏差与RoCoF不能过大,否则会对电力系统与负载的安全运行造成威胁。频率的边界条件应按照电网规约进行设计,表达式为: (10) 式中:Δωmax表示角频率偏差允许的最大值;k表示角频率变化率允许的最大值。 系统稳态运行时,虚拟惯量J0与阻尼系数D0保持恒定;失去稳定后,自适应调节控制参数,按照频率边界条件,使VSG的输出角频率按照图6中的理想响应曲线变化。 图6 输出频率的理想响应曲线Fig.6 Ideal response curve of output frequency 将失稳后的频率响应分为两个阶段。第一阶段是减速与匀速阶段,VSG以-k为斜率减小输出频率;但受Δωmax限制,当ω减小至ω0-Δωmax时应保持不变,在极限频率条件下使δ快速减小。随着工作点的左移,应适时开始加速,即进入第二阶段,VSG以k为斜率将ω增大至ω0。 根据图6与式(5)易知,频率响应曲线与ω=ω0围成的面积即为δ的稳态值与暂态最大值的偏差。在该面积与频率阈值的共同作用下,响应曲线存在三角曲线与梯形曲线2种类型。2种曲线的加速时刻t2可根据面积来计算:设t2时刻Δω=x,则加速持续时间为t3-t2=x/k,积分求得δ的偏移量为 (11) 由于δt3等于稳态功角δs1,则Δδ=δt3-δt2=δs1-δt2,加速时刻的判断条件为 2k(δ-δs1)-x2≤-c2。 (12) 式中c2为略大于0的常数。 为确保VSG能恰好在SEP稳定,应在合适的时刻退出同步策略,即 δ-δs1≤c3。 (13) 式中c3同为一个略大于0的常数。满足式(13)后,系统惯量与阻尼系数恢复为J0与D0。 自适应暂态同步策略中各阶段控制参数的设计介绍如下: 1)减速阶段。当系统同时满足式(7)与式(8)(失稳判断条件)时,期望VSG的ω以最大RoCoF减速,J1与D1应满足的条件为 (14) 令D1=0可以缩短暂态过程,则 (15) 2)匀速阶段。当ω减小到阈值时,期望RoCoF为0。此时Δω=-Δωmax,无论J2取何值,只要分子为0即可满足要求。为不失一般性,可令J2=J0。则 (16) 3)加速阶段。当满足式(12)(加速时刻判断条件)时,期望ω以最大RoCoF加速。仍令D3=0来缩短暂态,虚拟惯量J3应满足 (17) 按照上述策略设计每个阶段的虚拟惯量与阻尼系数,就能够实现VSG的快速频率恢复。 自适应暂态同步策略控制的等面积定则示意图如图7所示。 图7 等面积定则示意图Fig.7 Schematic diagram of the equal area criterion 为保守考虑系统的暂态稳定性,假设系统具有零阻尼。当系统恢复过程中的最大功角为δc时,ω=ω0。VSG从s点向c点运行过程中的控制策略为: (18) 根据等面积定则,计算该过程中的加速区域A的面积与减速区域B1、B2的面积,如果二者大小相等则说明系统一定会在c点实现频率平衡。首先,在式(18)第一个式子的左右两边同时乘以dδ/dt得 (19) 以此为基础可以计算加减速面积为: (20) 式中δc-δu1可按照图6中的曲线计算,即 (21) 由于频率平衡,dδs/dt=dδc/dt=0。因此易得 (22) 由此证明,本文所提策略能使VSG在大扰动情况下保持暂态同步稳定。 为了验证本文提出的自适应暂态同步策略的有效性,根据图1所示的VSG并网拓扑,在MATLAB/Simulink平台搭建仿真模型,并进行时域仿真。仿真模型参数如表1所示。 表1 仿真模型参数Table 1 Parameters of simulation model VSG输出电压含有大量谐波,需要滤波器将谐波滤除,滤波器的参数整定原则为谐振频率应远大于系统的基波频率,小于开关频率的0.1~0.2倍[34]。滤波电感Lf的选择应注意压降要小于额定电压的10%。 LC滤波器的参数选择会在一定程度上影响VSG的电压环动态。本文通过配置电压环的PI参数,使电压环的带宽远大于功率环带宽,因此在功率环中可以忽略该部分动态响应。电压电路环的参数设计不再赘述。 本文将暂态扰动分为两类,一是线路阻抗突变,二是电网电压骤降。以线路阻抗突变为例进行验证。 常系数控制的VSG在t=1 s时断开三相开关K,使Lg由4 mH增大为8 mH,仿真结果如图8所示。 图8 常系数控制的VSG仿真结果Fig.8 Simulation results of VSG with constant coefficient control 受到扰动后约0.4 s,本在减速的VSG开始加速,但此时Δω>0,说明系统很快越过了u1点,有功功率也在此刻骤然减小,甚至变为负值。使得VSG很快与电网失去同步,逆变器输出的有功功率与输出频率在失稳状态中大幅波动,功角逐渐发散。 表2 不同暂态同步策略的仿真结果对比 图9 不同暂态同步策略的VSG仿真结果Fig.9 Simulation results of VSG with different transient synchronization strategies 文献[33]所提策略在失稳区间内时,较大的负阻尼使VSG不能单调减速。VSG的工作点返回并越过UEP时,暂态策略恢复正惯量与正阻尼,导致动态恢复过程不受控制,系统波动的时间变长,在受扰后约2.5 s后才能稳定运行。 本文所提策略在判断系统失稳后,输出频率能按照边界条件减速,并在合适的位置开始加速,最短时间内实现系统稳定。VSG在受扰后约0.92 s恢复稳定。 仿真结果表明,2种策略在同一时刻判断系统失稳,与常系数控制策略相比,失稳时刻提前;常系数控制的VSG在越过UEP后仍能继续减速,得益于较大的阻尼系数。 表3 不同频率阈值的仿真结果对比 图10 不同频率阈值的VSG仿真结果Fig.10 Simulation results of VSG with different frequency thresholds 仿真结果验证了本文所提策略在I型暂态失稳问题中的优越性能:能准确、及时地判断VSG是否失稳;可根据输出信号状态自适应调节虚拟惯量与阻尼系数;最终明显改善了系统恢复稳定的动态特性。 图11 不同无功下垂系数的VSG仿真结果Fig.11 Simulation results of VSG with different reactive power droop coefficients 仿真结果的数据对比如表4所示。当kq=0.001时,VSG的输出频率没有减速趋势,直接进入失稳状态,说明系统发生了II型暂态问题,此时输出频率在50 Hz附近小幅振荡,功角在90°附近振荡(见图11(b)与图11(c)的缩略图)。 表4 不同无功下垂系数的仿真结果对比 在同样电网电压骤降情况下,随着无功下垂系数kq的增大,稳态功角也增大,PCC电压却减小。结合式(4)可知,VSG输出的最大有功峰值也将减小,严重影响系统的稳定性。 针对VSG的I型暂态失稳问题,本文提出一种考虑频率响应的自适应暂态同步策略。该策略改进了失稳判断条件,避免采用功率微分项作为判断信号;可设置不同的频率阈值,并自适应地调整虚拟惯量与阻尼系数,实现不同的VSG暂态同步过程;提高了失稳VSG的暂态恢复速度,且频率阈值越大,响应速度越快,其动态过程可分为三角曲线与梯形曲线2种类型。 最后,通过仿真实验结果验证了无功控制策略不会影响本文所提策略的有效性;同时可以收敛II型暂态问题中VSG,避免系统大幅振荡。 但本文未考虑II型暂态问题时VSG的应对策略,尤其是故障切除后系统快速稳定的策略;此外,本文所提方法对线路阻抗检测、电网电压检测方法要求较高,需要进一步探索检测方案。2 自适应暂态同步策略
3 控制参数设计与稳定性分析
3.1 虚拟惯量与阻尼系数设计
3.2 基于等面积定则的稳定性分析
4 仿真结果与分析

4.1 常系数控制的VSG仿真
4.2 不同暂态同步策略的仿真结果对比


4.3 不同频率阈值的仿真结果对比


4.4 无功控制参数对暂态同步策略的影响


5 结 论
猜你喜欢
电力自动化设备(2022年8期)2022-08-09
现代电力(2022年2期)2022-05-23
大电机技术(2021年5期)2021-11-04
能源工程(2019年6期)2019-12-02
电子制作(2018年14期)2018-08-21
中国惯性技术学报(2018年1期)2018-05-10
电子测试(2017年12期)2017-12-18
重庆理工大学学报(自然科学)(2017年5期)2017-06-29
电子测试(2017年23期)2017-04-04
中北大学学报(自然科学版)(2015年6期)2015-12-02