
水下高重频激光测距系统设计与实现
2024-01-15 10:52丁元昊梁善永宗思光
激光与红外 2023年12期
丁元昊,梁善永,宗思光
(中国人民解放军91428部队,湖北 武汉 430033)
1 引 言
脉冲式水下激光测距作为一种新型探测技术,凭借其距离分辨率高、探测距离远、对光源相干性要求低等优点,可实现对水下复杂环境中弱小目标的侦察、探测、识别、定位。鉴于声呐探测只能探测大直径、聚集的水下目标,难以实现对离散的水下小目标的探测,利用该系统可以有效弥补声呐探测技术的不足,使测距精度更高、定位更精准,这也为舰艇的出海安全航行提供了一种新的思路。
水下微弱目标探测在水下无人平台避障及导航、水下障碍物定位搜索等军用和民用领域有着非常重要的地位和作用[1]。高重频水下激光测量系统可实现对水下小目标高精度探测,是实现海底地形地貌测绘、无人潜航器避障的基础。
水下渔网、三角锥等弱小目标的激光探测是在强水体混响背景下的弱目标检测,目标的激光回波强度与近程水体散射强度相当,导致检测系统的目标回波信噪比低。若减小激光能量,则远处目标信号减小很多甚至消失,若增大激光能量,近距水体散射会造成目标回波信号饱和。此时水下高重频激光测距系统需尽可能的屏蔽近距水体散射、增强微弱目标检测能力及微弱目标探测距离。
为实现对水下渔网、三角锥等弱小目标的高精度探测,设计了激光发射/接收非同轴、高精度的高重频水下激光测距软硬件系统。开展了水下不同距离、不同强度目标的激光测距探测实验,结果表明,高重频激光测距系统能够对水中小目标进行有效探测,探测精度为15 cm。作为一种快速精确的水下激光探测设备,该系统的设计和应用为水下这一复杂环境中探测微小目标提供了切实可行的新思路,在研究和勘探海洋复杂地质环境中应用前景广阔。
2 系统组成
2.1 系统整体设计
在水下激光探测系统中,为使得探测系统在保证高精度的前提下又能兼顾探测距离。应着重考虑接收系统,保证接收系统对水下的微弱光具有高灵敏度的实时探测能力。由于近处水体引起光的近场饱和,使接收系统无法收到远处回波信号的问题,拟定采取在近场水体强光散射抑制解决方案、光学盲区抑制方案、可变接收方案,以此来增大水下激光探测信号的动态范围。
系统采用激光发射系统、激光接收光学系统、激光回波APD接收处理系统构建了不同目标、不同水质条件下的水下高重频激光探测实验系统。脉冲发射子系统发射532 nm高重频的脉冲式蓝绿激光对水下不同距离处的目标进行探测[2-3];激光接收光学系统实现对目标激光回波的汇聚接收,激光回波APD接收处理系统通过将反射回波中的电信号转换成电信号,并及时进行放大处理以便得到示波器能够采集到的电信号数据。
当激光探测系统工作时,由激光器发射脉冲激光照射在物体上,与水中被探测物体发射碰撞产生漫反射,随即反射回波被接收系统接收。在接收处理子系统中芯片将接收到的光信号转换为电信号,通过放大电路以及相关放大器件的处理,将多级放大后电流信号进一步变为电压信号,图1为水下高重频激光测距探测总体设计图。

图1 水下高重频激光测距探测总体设计图
接收系统和物体之间的距离是通过发射脉冲的飞行时间来计算的,通过计时电路的计时功能开始对每个测量波束分析其回波信号。信息处理电路进行低通滤波和阈值比较,得到激光发射和回波信号之间的时间间隔t,通过距离值解算出发射光源到探测目标之间的距离R。其精度取决于:激光脉冲的上升沿、接收通道带宽、探测器信噪比和时间间隔精确度。
发射激光系统采用被动调Q技术532 nm、5 uJ脉冲激光器,波长为532 nm,激光器重频可调,最高重频5 kHz。
激光接收光学系统带有窄带滤波功能的光学聚焦系统,光学系统具有532 nm窄带透过功能,可有效滤除其他波段自然光的干扰。
激光回波APD接收处理系统选取对532 nm的峰值波长响应度较高的探测器,以便提高探测系统的探测距离、探测精度以及信噪比。光电探测器选用FIRST SENSOR公司的雪崩光电二极管(APD),在接收激光束时具有高增益、高灵敏度、实时性好的优点。同时系统采用跨阻放大器控制高灵敏度接收芯片的增益。
系统设计两块PCB,包括定子PCB和转子PCB,FPGA开发板和定子PCB之间的信号交互会经过一个电平转换电路,激光测距传感器的电源以及信号线会从定子PCB通过导电滑环连接到转子PCB,然后传给激光探测传感器。在定子驱动原理图的设计中,电机驱动部分包括光耦隔离电路、电机驱动电路、电源电路部分、FPGA接口电路和接收电路部分。其中通过电机驱动芯片来实现电机驱动电路的正常导通,通过迟滞比较器对接收器输出的信号进行整型[2-10]。最后,FPGA开发板和探测系统之间通过排线进行通信。图2为本次实验中脉冲激光接收系统的实物图,图3为脉冲激光处理系统内部结构图。

图2 脉冲激光处理系统实物图(正面)
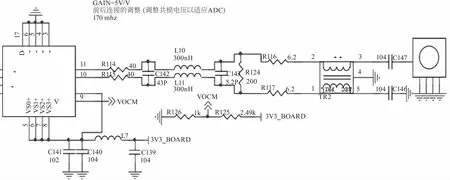
图3 脉冲激光处理系统的内部结构图
2.2 APD宽带高增益放大器的确定及设计
APD的输出为μA量级的微弱电流信号,对于它的电流-电压转换(I-V)采用高性能运放组成跨导放大器来实现,如图4所示。
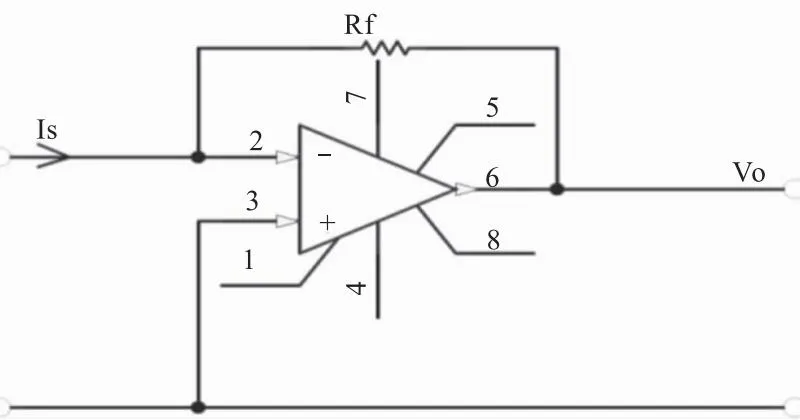
图4 跨阻放大器IRGTR(I-V)转化
该方法虽然对放大器件性能和工艺要求较高,容易产生自激效应,但凭借其低噪声、高灵敏度和宽带宽的性能,不会引入除系统以外的其他噪声,可以有效实现对水下低信噪比信号的接收。
高精度、低噪声、大带宽的跨导放大器的电路原理图如图5所示。

图5 宽带跨导放大器电路结构图
其中,稳压电阻和稳压电容在电路中用来减小由运算放大器输入偏置电流引起的直流和交流误差,同时起到保护电路的作用。
2.3 光电放大电路的设计与实现
在脉冲激光器的接收模块和放大器模块本实验装置采用了光电雪崩光电二极管。作为一种PN结型的光检测二极管,它具有高速、高互阻抗增益、低噪声的功能[10-11]。工作时加较大反向偏压达到雪崩倍增状态。通过光电探测器内部载流子的雪崩倍增效应来放大光信号以提高灵敏度。在光敏面接收532 nm波长过程中,为增大其探测距离,提高光敏面的增益比,采用滤波电路设计以及多级放大理论对其进行内部电路设计,光电放大电路的内部结构如图6所示。
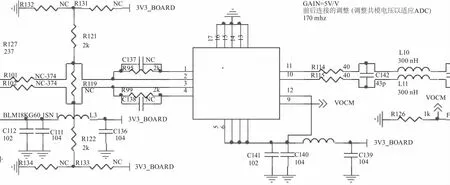
图6 光电放大电路的内部结构
3 系统软件设计
系统基于Keil软件对STM单片机进行C语言编程和算法设计,在水下高重频激光测量系统,激光硬件设计硬件基础上,实现整套系统协调工作。主要编制示波器通信代码、距离值解算核心代码、计算机点云显示代码。
将数据采集模块输出数据为极坐标,通过坐标转换模块将极坐标先转换为直角坐标,再转换为图像坐标,以方便后续图像叠加。若上板调试结果异常,还需在代码中添加调试信息,通过FPGA内置的逻辑分析工具把信号抓取出来进行分析,找到异常的代码进行修改。
4 实验及结果分析
为验证水下高重频激光测量系统水下弱小目标激光探测的可行性,开展了以下实验测试。
(1)探测精度实验。包括对被测物体距离的测量并求平均值以及误差分析,并与实际距离值进行对比;
(2)激光接收系统的功能验证和性能测试。包括测量水下接收到的不同距离和强度的激光波形,以及对接收的放大信号的采集和波形的分析。
利用激光测距传感器在空气中进行探测实验,首先为利用激光测距传感器在空气中进行探测实验。通过与实际距离值比对,进一步论证其水下探测的实际可行性。
下面以白色目标作为参照物利用该探测系统对空气中不同距离的目标(15 m,10 m,5 m)进行探测实验。将示波器导入的assic码数据进行归一化处理,并利用Matlab处理绘制出空气中不同距离处的脉冲激光接收的波形图,如图7所示。

图7 空气中不同距离处激光接收回波信号图
图7中第一个脉冲为激光器发射到15 m反射回来的激光,此时恰好被该探测系统的接收模块所接收。第二个脉冲即为激光器发射出的激光探测到位于接收模块前的10 m,5 m处的障碍物反射形成。通过测得相邻两个脉冲峰值之间的时间差,求得被测物体与激光器之间的距离。因为多次平均的效果可以降低噪声,所以用示波器对探测目标时采用平均模式观察具体波形。在采集示波器得到的png图像中,始终显示已以满屏为策略,来决定采样的多少。
下面利用实验室18 m水池,构建水下高重频激光测量系统实验平台。在实验室模拟的浑浊度近似相同的水下环境中,分别改变目标位置、接收增益。除了测量距离和接收增益这两个变量外,确保实验其他外部环境均相同,利用该探测系统对水中不同距离的目标进行探测实验。典型的目标激光探测回波如图8所示。

图8 距离玻璃窗口3.0 m处的水下接收波形图
图中第一个脉冲为激光器发射的激光参考信号。第二个脉冲为水下目标的激光回波。通过计算出两个脉冲峰值之间的时间差,进而求得被测物体与探测系统前玻璃透镜之间的距离,也即该接收系统与水下被探测目标之间的距离。
在系统设计上采用了非同轴的光学发射、接收系统,由于发射接收有几何盲区,在最远处会遵从理想状态下的规律。但在近处时,由于进场的问题限制住了探测系统的进场,使从水槽玻璃口处透射出来的光无法被接收,所以越近信号相反会越弱。因此在接收到的信号波形采集图中总会有一个最强的回波接收峰值。
在进行水下实验时,共测量了从1.5 m到11.0 m不等的各个位置的水下目标,存储数据共计22组。如图9所示,从图中可以发现,一开始近处波形较强,这是因为水体近处散射较强,所以导致出现该现象的发生;此后激光接收回波信号逐渐减弱,这是由于出现了光学接收视场的盲区,导致激光散射的回波没有被完全接收到,因此信号波形会出现下降的现象。在50 ns左右,发现激光散射回波又继续增强,这是因为随着距离的增加,导致发射视场与接收视场完全重合,峰值达到最强,正如图10所示。

图9 水下1.5 m到11.0 m不等的各个位置处接收回波信号图
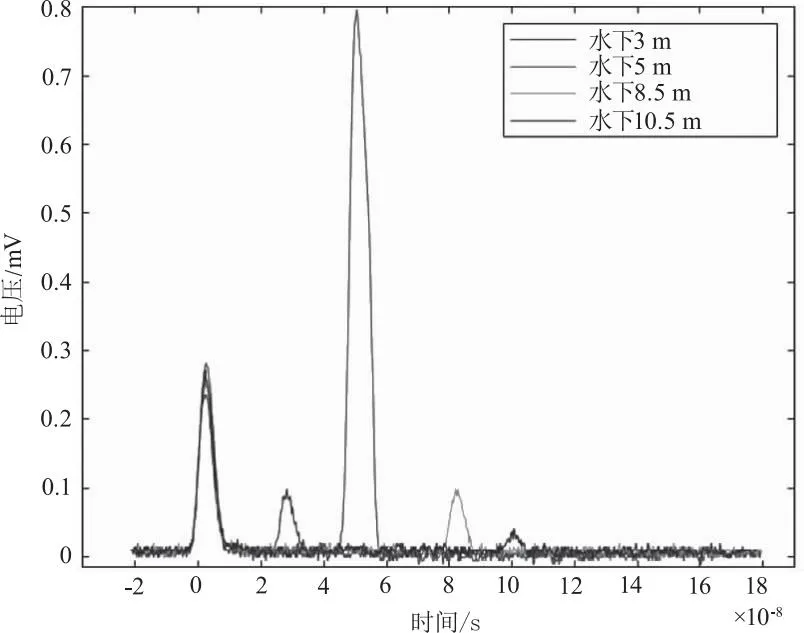
图10 水下3 m,5 m,8.5 m,10.5m距离处接收回波信号图
为验证激光测距数据的稳定性及精度,对多次测量的高重频激光测量得到的目标距离值进行统计,并与目标实际距离真值进行比较。统计分析水下激光测距性能,水下目标探测实验逐点对比结果如表1所示。
从表格中可以清晰地看出,采用激光高重频探测可实现对目标的高稳定性探测,探测精度误差在15 cm以内。分析水下激光测距的误差来源主要有以下两点。
(1)水下水分子颗粒成分较多,因此导致水体后向散射较大,水下噪声环境复杂。通过增加脉冲重复累积次数的方法来提高信噪比,以此减小水体的噪声干扰来提高探测性。
(2)实验器材本身存在着系统误差,通过更换聚焦效果更好的透镜或者接收效果更好的芯片使得可变增益进一步增大,以此来提高水下探测系统的分辨率和探测效果。
5 结 论
水下渔网、三角锥等弱小目标的激光探测是在强水体混响背景下的弱目标检测,目标的激光回波强度与近程水体散射强度相当,导致检测系统的目标回波信噪比低。设计了激光发射/接收非同轴、高精度的高重频水下激光测距软硬件系统。开展了水下不同距离、不同强度目标的激光测距探测实验,并针对水下不同距离目标批量距离值的回波信号进行分析,结果表明该系统有效解决了传统激光测距领域无法适应水下强水体散射的问题,可对近场水体强光散射以及光学盲区进行有效抑制,并实现了对水下弱小目标的高精度激光探测。
猜你喜欢
中学生数理化·八年级物理人教版(2023年11期)2023-12-26
数学物理学报(2022年3期)2022-05-25
民用飞机设计与研究(2019年4期)2019-05-21
成都信息工程大学学报(2018年4期)2019-01-23
电子制作(2018年23期)2018-12-26
测控技术(2018年6期)2018-11-25
传感器与微系统(2018年7期)2018-08-29
通信电源技术(2018年5期)2018-08-23
中成药(2017年12期)2018-01-19
制导与引信(2017年3期)2017-11-02
