改进VSG 的低压微电网无功功率均分控制策略*
2024-01-15 06:57王清璇薛亚辉
电气工程学报 2023年4期
王清璇 孙 宁 薛亚辉 李 斌
(1.焦作大学人工智能学院 焦作 454000;2.河南理工大学电气工程及其自动化学院 焦作 454003;3.焦作大学信息工程学院 焦作 454000)
1 引言
“双碳”战略目标下我国能源发展加速转型,新型电力系统由集中式发电逐步迈向分布式发电(Distributed generation,DG),微电网[1-4]作为分布式发电的组织形式之一,为可再生能源并网创造了可靠条件。由于微电网中的电力电子装置具有低惯性、弱阻尼等特点,电力系统逐渐呈现失稳、耦合的复杂特性,这将恶化电力系统的暂态特性与稳态特性,严重影响了微电网的安全稳定运行。虚拟同步发电机(Virtual synchronous generator,VSG)[5-7]通过模拟同步发电机的外特性为微电网提供了一定的阻尼和惯性,实现了分布式电源的友好并网。
孤岛运行时,VSG 可以独立地对电压电流与功率进行控制,同时采用多机并联来提高微电网的容量以及可靠性。但是由于中低压微电网线路阻抗的差异,各个逆变器输出功率与电压各不相同,这将导致功率无法均分以及系统环流增大。环流不仅会造成电力电子设备过热,而且影响电力电子设备的寿命与安全性,因此环流的抑制在微电网并联运行中显得尤为重要。
文献[8]提出虚拟电感的功率解耦控制策略,通过在电压电流环中加入虚拟电感来减小线路阻抗间的差异,实现输出功率的解耦,但是会产生较大的电压跌落问题。文献[9]提出虚拟负阻抗的功率解耦控制策略,该控制策略包括“虚拟负电阻”与“虚拟电抗”两部分。虚拟负电阻抵消了线路的阻性成分,虚拟电抗减小了线路阻抗间的差异,实现了功率的独立控制,满足下垂控制“即插即用”的特点,但是所提控制并未给出线路阻抗的测量方法。文献[10]提出改进虚拟阻抗的解耦控制策略,通过虚拟阻抗来实现逆变器输出阻抗呈现纯感性,实现了无功功率的均分控制以及减小了系统环流,同时利用无功功率的差值来动态调节虚拟阻抗改变量,在线路阻抗未知的情况下仍具有良好的解耦效果,但是也没有考虑加入虚拟阻抗带来的电压跌落问题。文献[11]提出动态虚拟阻抗解耦控制策略,首先利用虚拟阻抗解除并联模式下的功率耦合,其次改进了电压控制环路,通过加入电压补偿项提高了电压幅值,最后通过加入虚拟阻抗补偿项提高了无功功率的分配精度,较好地实现了所提控制策略的功率均分效果。
本文首先介绍了孤岛运行模式下VSG 的控制结构,然后分析了功率耦合的原因,提出了改进VSG 的无功功率均分控制策略。通过建立功角与阻抗角的小信号模型,在虚拟阻抗的变化量上加入功角的补偿量,以功角的变化来动态调节虚拟阻抗的值,在线路阻抗未知的情况下也可以提高无功功率分配的精度。对于虚拟阻抗导致的电压跌落问题,通过在控制环路中加入电压补偿项来抬高输出电压幅值,改善了系统的电能质量。最后,通过建立闭环系统输出阻抗传递函数提高控制系统的稳定性与动态性能,在 Matlab/Simulink 中搭建了两台VSG 来验证所提控制策略的有效性与可行性。
2 VSG 基本原理
本文研究的VSG 主电路拓扑结构,是较为常见的三相桥式逆变电路,该逆变电路可以在孤岛与并网条件下切换。VSG 的主电路拓扑结构如图1 所示,Udc为直流电压源,Ua、Ub、Uc为桥臂侧输出电压,Lf为滤波电感,Cf为滤波电容,Uca、Ucb、Ucc为电容电压,ila、ilb、ilc为桥臂侧电感电流,ia、ib、ic为VSG 输出电流,Zline为线路阻抗,VSG 通过并网点(Point of common coupling,PCC)与电网相连,线路阻抗与本地负荷相连,打开PCC 点,VSG 工作在孤岛模式下[12-14]。
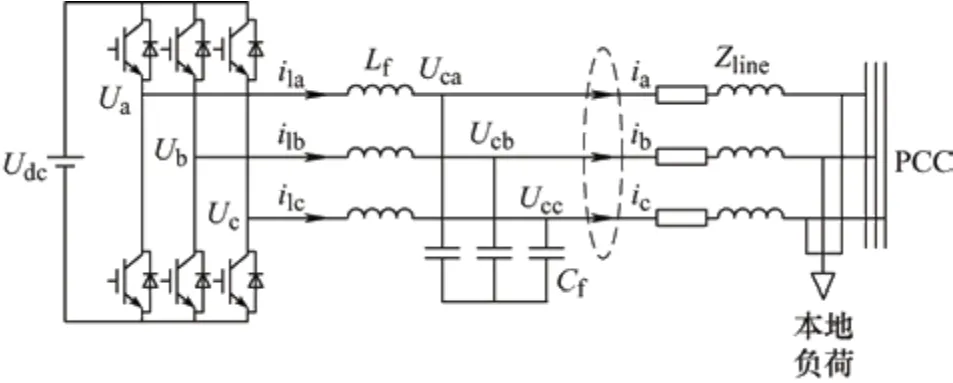
图1 VSG 的主电路拓扑结构
孤岛运行模式下VSG 的控制结构如图2 所示,主要包含有功控制环和无功控制环,有功功率控制环需要一定的阻尼和惯性,根据同步发电机转子电气方程可以得到VSG 的有功功率控制环的方程

图2 VSG 控制结构图
式中,J是虚拟转动惯量;ω是输出角频率;ωn是给定角频率;Pref是有功功率指令值;Pout是有功功率输出值;D是阻尼系数;δ是输出功角。同步发电机根据定子电气方程来实现端电压与输出无功功率的调节,孤岛模式下VSG 的无功功率控制环的方程为
式中,E为机端电压,Un为机端电压额定值,Qref为无功功率指令值,Qe为输出无功功率。
3 并联VSG 功率解耦
3.1 并联VSG 功率耦合原理
两台VSG 孤岛并联模式下的等效电路图如图3所示,VSG 的交流侧输出电压为Ei∠δi(i=1,2),公共耦合点母线电压为Upcc∠0,Zlinei=Ri+jXi为线路阻抗,Si=Pi+jQi为输入电网的复功率,i0i是VSG 输出电流,Zload是孤岛运行模式下的本地负荷。
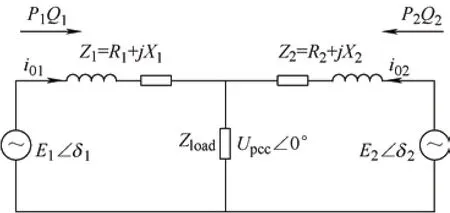
图3 两台VSG 并联等效电路图
可以得到两台并联VSG 的电流表达式如式(3)所示
继续展开式(3)可以得到
从式(4)可以看到,线路阻抗的差异会导致两台VSG 的电流不同,系统环流可以表示为
iH为系统环流的大小,通过加入虚拟阻抗设计系统输出阻抗为感性,减小线路阻抗间的差异,因此Z1=Z2=jX,通常认为δi很小,sinδi≈δi,cosδi≈1(i=1,2),忽略电阻的影响,可以得到
通过式(6)可以得到,系统中主要存在无功环流,并且随着电压幅值的差异而增大,考虑到实际情况,两台VSG 输出的电压幅值不可能完全相同,因此系统的环流也无法完全消除,只能限制在规定的范围之内。
根据并网等效电路,利用电力系统潮流计算公式可以得到VSG 输出的复功率,考虑线路呈阻感性时的复功率表达式如式(7)所示
式中,αi是线路的阻抗角,表达式为
通常认为δi很小,sinδi≈δi,cosδi≈1(i=1,2),忽略电阻的影响,可以得到
从式(9)可知,有功功率与输出相角成正比,无功功率与输出电压成正比,这与VSG 的调频调压特性一致,因此可以设计加入虚拟阻抗来减小线路阻抗间的差异,使得无功功率只受电压控制的影响,实现无功功率的独立控制。
3.2 改进虚拟阻抗的解耦控制策略
对式(7)采用小信号分析法,其表现形式为有功功率对功角与输出电压、无功功率对功角与输出电压求偏导的方式[15-16],可以得到
从式(10)可以得到
可以看出功角对于无功功率的耦合项是电压对于有功功率耦合项的Es倍,说明功角的变化对无功功率的影响要远远大于输出电压的变化对有功功率的影响,因此,下文在进行试验验证时,只考虑功角变化对无功功率的影响。
根据式(11)做出功角与电压变化时的三维立体图如图4 所示,图4 说明功角与阻抗角对耦合影响的内在关系。假设ES=Ug=220 V,功角稳定工作为3°时代表M1 平面,功角稳定工作为6°时代表M2平面,此时M1 面与M2 面的阻抗值都为Zline=0.64+j0.314 Ω,阻抗角α=26.565°,由此可知功角的增加可以加重功率耦合;同时当功角稳定工作为3°,阻抗值Zline=0.5+j0.5 Ω,阻抗角α=45°时,M3 面的功率耦合程度明显上升,说明低压输电线路阻抗角的增大会加重功率耦合的程度。经过以上分析,在考虑无功功率解耦时不得不考虑输电线路阻抗角与功角的影响。据此本文提出一种改进虚拟阻抗的无功功率均分控制策略,以功角的变化来动态调节虚拟阻抗的值,使其在线路阻抗未知的情况下仍然具有良好的功率均分效果。
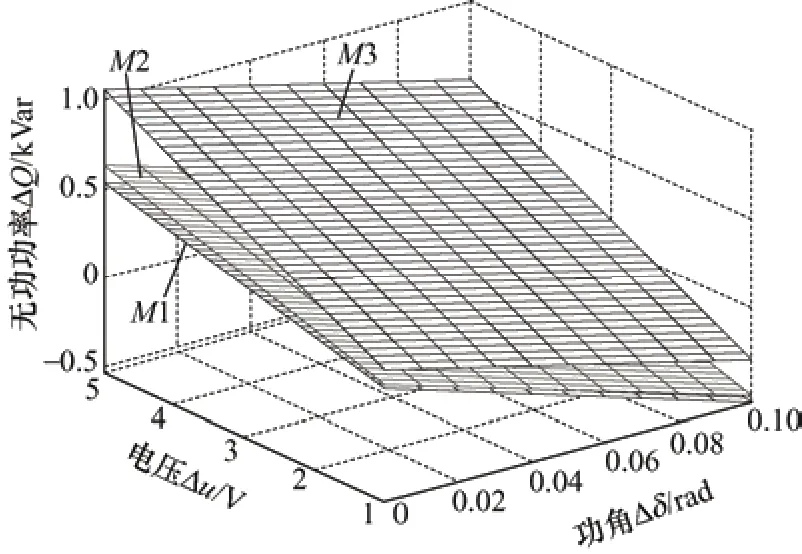
图4 功角与电压对无功功率的关系
由图4 可知,电压对于无功功率的调节属于正常的调节控制,功角与线路阻抗角会对功率分配产生影响。因此本文采用功角来补偿阻抗角的变化,阻抗角的变化量可以分为两部分,第一为阻抗角实际的变化量,第二为影响阻抗角的功角变化量[17-18]。只考虑无功功率的解耦,对式(7)中无功功率的功角δ与线路阻抗角α求偏导
式中,Esi为交流侧稳态时输出电压,αsi为稳态时阻抗角,根据前文得出的结论,功角的变化可以分为两个部分,记为
式中,∆δ*为功角的变化量,∆α*为阻抗角实际的变化量,根据解耦的要求,无功功率的变化量不受阻抗角与功角变化的影响,因此得到无功功率的变化量为零,把式(13)代入式(12)可知
根据式(14)可知
式中,Kco为与功角变化有关的常量值。根据线路阻抗的公式,建立线路阻抗的小信号模型,同时保持幅值恒定,即阻抗对电阻与电感求偏导
式中,Rsi和Xsi分别为电阻及感抗的基准值;∆Zlinei、∆R、∆X分别为阻抗、电阻及电感值的改变量。将式(15)代入式(16),可以得到抑制无功功率变化所需的功角改变量为
在实际的控制系统中,总的系统虚拟阻抗为Rv*和,通过改变Rv*和L*v的值可以匹配实际输电线路的值Rg和Lg,故式(17)中∆R和∆X值也就是虚拟阻抗的补偿量。
根据虚拟阻抗的设计可以得到
把式(17)代入式(18)可以得到
式中,ω表示系统角频率,根据微电网输出电压与电流以及输电线路阻抗的关系,可以得到系统的虚拟阻抗表达式,同时利用派克变换转化为dq轴上的表达式
根据上述的分析可知,通过在虚拟阻抗的基础上加入功角补偿项可以实现无功功率的均分,图5是加入改进后的虚拟阻抗解耦控制框图,通过加入虚拟负电阻与虚拟电感来实现解耦,虚拟负电阻用来消除线路的阻性成分,虚拟电抗减小线路阻抗间的差异,从而实现无功功率的解耦[19]。
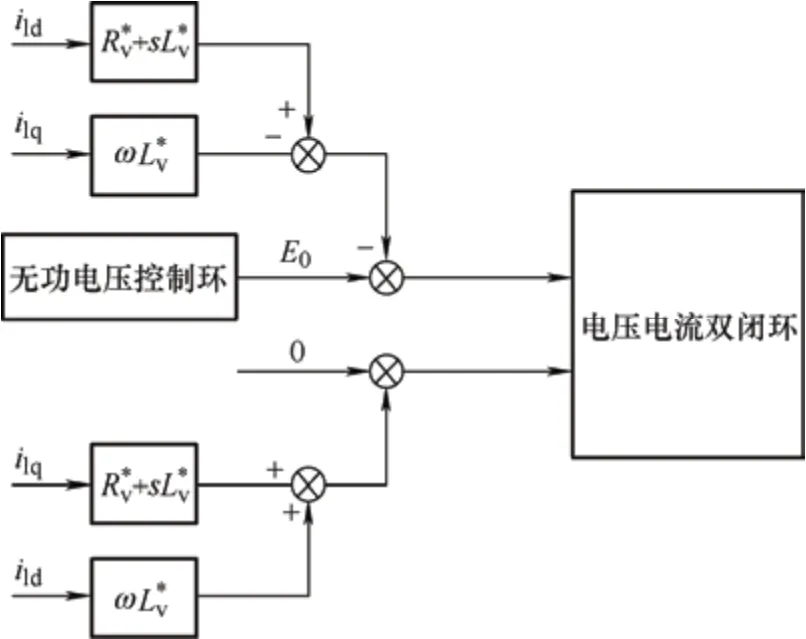
图5 加入改进后的虚拟阻抗解耦控制框图
虚拟阻抗解耦控制策略可以减小系统环流[20],提高无功功率的分配精度,但是会导致电压降落,因此需要加入电压补偿项来提高输出电压的幅值。根据电力潮流计算得到线路阻抗压降图,如图6 所示。
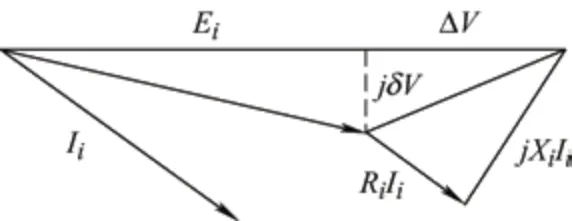
图6 线路阻抗压降图
根据图6 可知线路阻抗的压降,根据线路阻抗的值,忽略δV的变化,可以得到
在无功功率控制环中加入电压补偿项,改进后的无功功率控制环的公式为
因此可以得到改进后的无功功率环控制框图如图7 所示,在并入虚拟阻抗导致电压跌落时,改进的无功功率控制环可以提高电压的幅值。
4 稳定性分析
根据VSG 的主电路拓扑结构,可以得到基尔霍夫电压电流的的数学表达式,同时利用派克变换将三相abc坐标系下的交流量转换为两相dq坐标系下的直流量,得到dq坐标系下的状态方程为
式中,ild、ilq为电感电流在dq轴上的值;iod、ioq为逆变器输出电流在dq轴上的值;ed、eq为桥臂输出电压在dq轴上的值;uod、uoq为逆变器输出电压在dq轴上的值。
根据式(23)可以得到VSG 电压电流控制环路的等效框图,如图8 所示,电压电流控制环路中采用PI 调节器,同时调制增益为KPWM。
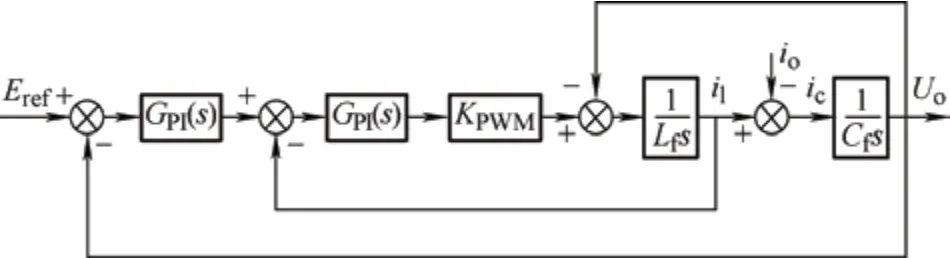
图8 电压电流双闭环等效控制框图
由图8 可以推出电压电流控制环路的输入输出等效传递函数,并且等效为戴维南等效模型
其中
式中,Gu(s)=Kup+sKui,Gi(s)=Kip+sKii,根据戴维南等效模型加入改进后的虚拟阻抗控制框图如图9所示。
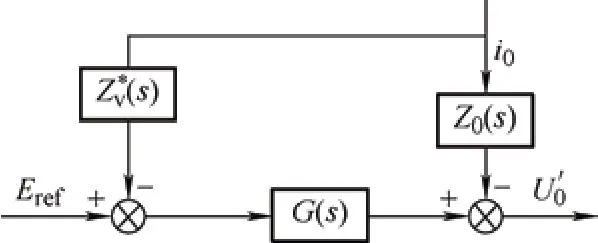
图9 改进虚拟阻抗的控制原理图
由图9 可得
式中,Z0′(s)是改进后的系统输出阻抗传递函数,可以得到仿真参数如下所示:耦合点电压与电网电压有效值ES=Ug=220 V;直流侧电源为Udc=750 V;LC 滤波器参数的值Lf=3 mH,Cf=10 μF;开关频率为fk=10 kHz;系统额定频率为fN=50 Hz;调制环节增益KPWM=Udc/2=375,电流控制环参数kip=20,kii=500;电压控制环参数kup=0.04,kui=53.33;并入虚拟电感的值Lv=6 mH,Rv=0.64 Ω;功角的变化量为∆δ=3.06 °。引入改进后的开环虚拟阻抗伯德图如图10 所示。
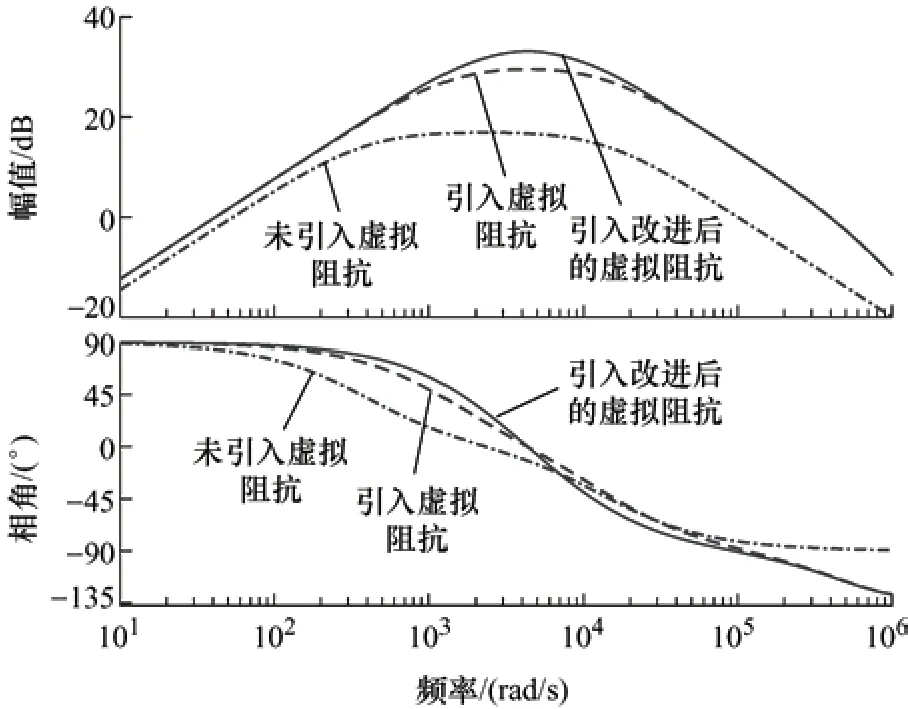
图10 系统开环输出阻抗伯德图
由图10 可以得到未加虚拟阻抗时系统的相角裕度约为90°,此时系统的稳定性较差,根据自动控制原理,相角裕度设计在30°<θ(pm)<70°时控制系统的稳定性最好,从图10 中可以看到引入虚拟阻抗与引入改进后的虚拟阻抗的相角裕度在65°左右,二者相差不大,说明引入改进后的虚拟阻抗并未对原来的控制系统稳定性产生较大影响,而相比于未引入虚拟阻抗时,两者的稳定性都有所提高。因此可以设计一个改进后的虚拟阻抗来实现无功功率的解耦[21]。
5 仿真结果分析
为了验证所提控制策略的有效性,在Matlab/Simulink 中搭建了两台VSG 并联运行,打开PCC 并网点,VSG 工作在孤岛模式下,其中部分参数在第4 节稳定性分析中可以得到,VSG 功率控制环关键参数如表1 所示,线路阻抗Zline1的虚拟电阻为Rv=0.64 Ω,线路阻抗 Zline2的虚拟电阻为Rv=0.5 Ω,两台VSG 的虚拟电感的值Lv=6 mH,相对于Q-δ的耦合,P-E的耦合可以忽略不计,本文主要研究无功功率的均分效果,所以只显示无功功率的波形。
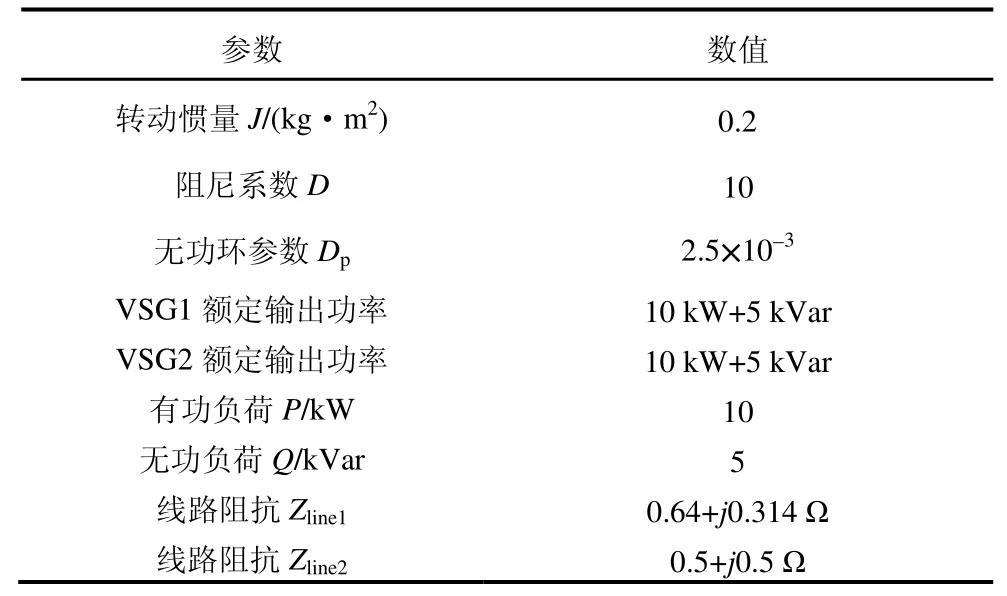
表1 VSG 仿真模型参数
两台传统VSG 并联时的输出无功功率波形图如图11 所示,仿真时间设置为1.5 s,0~0.5 s 时两台VSG 并联运行,同时带10 kW 的有功负荷和5 kVar 的无功负荷,0.5~1 s 时有功负荷增加10 kW,无功负荷增加5 kVar,1~1.5 s 时切除增加的负荷,两台VSG 恢复到最初的运行状态。从图11可以看到,在0~0.5 s 时和1~1.5 s 时由于线路阻抗的差异,无功功率不能达到额定值,VSG1 的无功功率偏差为(5 760-5 000)/5 000×100%=7.6%,VSG2 的无功功率偏差为(5 000-4 350)/5 000×100%=6.5%,说明了无功功率无法均分。0.5~1 s时,两台VSG 无功都增加5 kW,VSG1 的无功功率偏差为(10 900-10 000)/10 000×100%=9%,VSG2的无功功率偏差为(10 000-8 700)/10 000×100%=13%,由此可知在负荷并入的时候,VSG 无功功率耦合程度更加严重。

图11 传统VSG 并联输出无功功率图
两台引入虚拟阻抗后的VSG 输出无功功率波形图如图12 所示,从图12 可以得到,0.5~1 s 时,VSG1 的无功功率偏差为(10 000-9 800)/10 000×100%=2%,VSG2 的无功功率偏差为(10 000-9 500)/10 000×100%=5%,引入虚拟阻抗之后,两台VSG在0~0.5 s 时和1~1.5 s 时输出无功功率差值减小,基本达到了功率均分的效果。仿真证明在VSG 并联中,虚拟阻抗具有良好的解耦效果,并且在图12 中VSG 功率响应速度更快,达到稳态值的效果更好,说明了改进后的VSG 控制策略比传统的VSG 稳定性更好,但是基于虚拟阻抗的解耦控制策略只能实现近似解耦,无功功率之间仍然存在一定的差值。
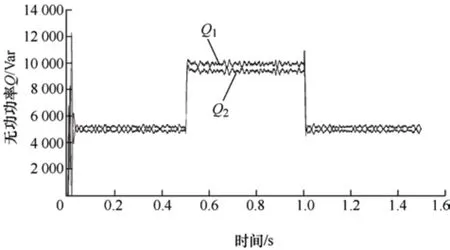
图12 加入虚拟阻抗后的VSG 并联输出无功功率图
加入虚拟阻抗前后系统的电流对比图如图13所示,i0i(i=1,2)是两台VSG 并联电流,iH是VSG并联系统环流,图13a 是传统VSG 并联系统电流图,i01的幅值为15.1 A,i02的幅值为11.1 A,系统环流iH的幅值为3 A,图13b 是加入虚拟阻抗之后的VSG电流图,i01的幅值为14.8 A,i02的幅值为11.5 A,系统环流iH的幅值为2 A,从图13 可以得到,传统VSG 在0.1~0.2 s 时系统环流更大,经过虚拟阻抗解耦之后,两条线路的电流差变小,系统环流得到了抑制,说明虚拟阻抗有抑制环流的效果。
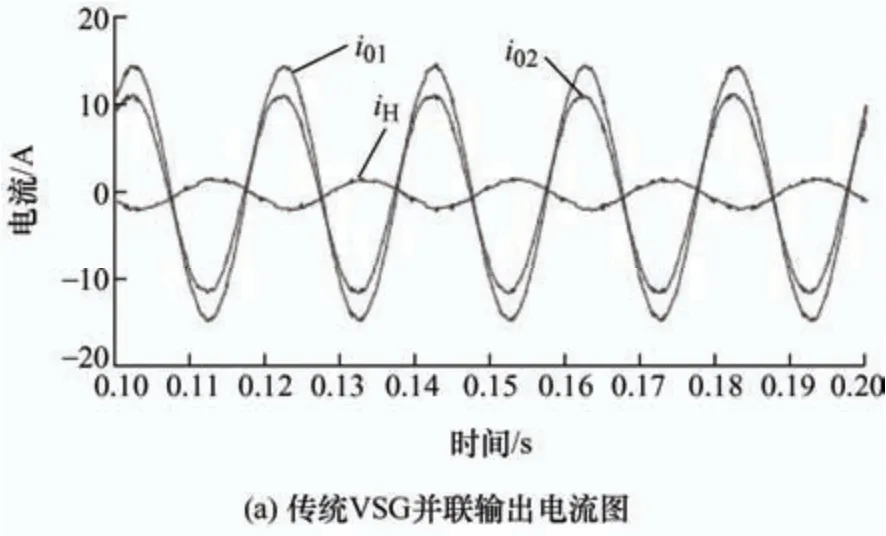
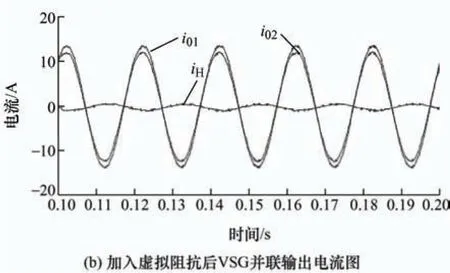
图13 VSG 并联输出电流对比图
图14 是加入电压补偿前后的电压幅值波形图,U1是加入电压补偿后的电压幅值波形图,U2是未加入电压补偿的电压幅值波形图,在0~0.5 s 和1.0~1.5 s 时U1的幅值为308 V,U2的幅值为306 V,0.5~1.0 s 时,U1的幅值为306 V,U2的幅值为304 V,根据式(21)进行电压补偿,经过电压补偿项后电压的变化在规定的范围内,满足并网要求。
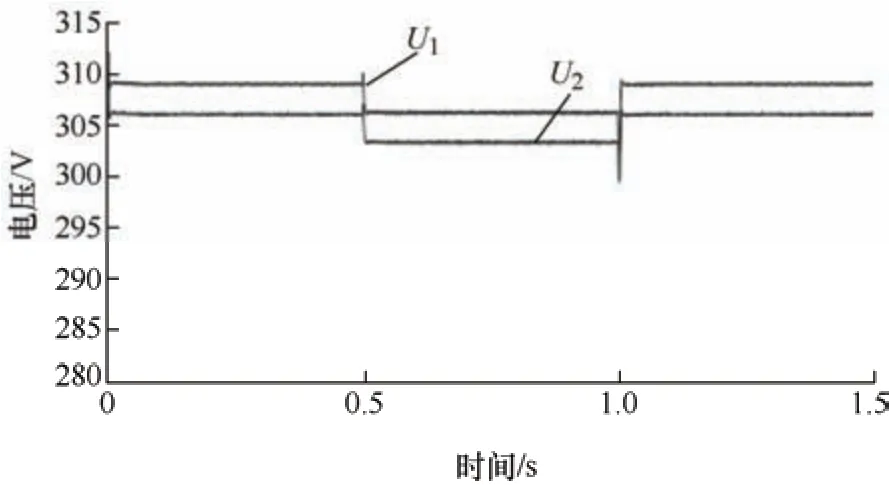
图14 加入电压补偿前后的电压幅值波形图
图15 是加入改进虚拟阻抗后的VSG 并联输出无功功率图,在0~0.5 s 与1~1.5 s 时输出无功功率接近5 000 Var,在0.5~1 s 时输出无功功率接近10 000 Var,可以看到经过功角补偿后的虚拟阻抗解耦控制策略基本实现了功率均分的效果,说明了该控制策略的有效性。

图15 加入改进虚拟阻抗后的VSG 并联输出无功功率图
图16 是加入改进虚拟阻抗之后的VSG 并联电流图,i01的幅值为13.8 A,i02的幅值为12.5 A,系统环流iH的幅值为0.7 A,从图16 可以得到,经过改进后的虚拟阻抗可以再次抑制系统环流,说明了加入功角补偿项的有效性。
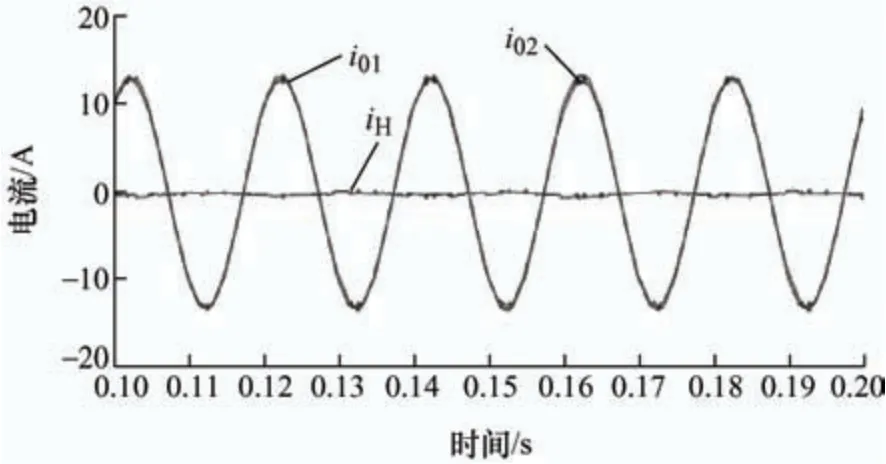
图16 加入改进虚拟阻抗后的VSG 并联输出电流图
6 结论
本文针对VSG 在中低压微电网中存在的耦合现象展开研究,分析了无功功率耦合的原因,在此基础上设计了一种改进VSG 的无功功率均分控制策略,解除了VSG 并联过程中的功率耦合现象,并且在Matlab/Simulink 中验证了所提控制策略的有效性和可行性,最后得出以下结论。
(1) VSG 并联运行时,线路阻抗角与功角的差异将会导致无功功率分配不均以及系统环流。
(2) 所提控制策略通过在虚拟阻抗改变量中加入功角补偿项,提高了无功功率分配的精度,实现了对环流的抑制,同时加入电压补偿项提高电压幅值,解决了电压跌落的问题。
(3) 所提控制策略提高了输出无功功率分配负荷的精度,避免了系统环流的增大,因此对于构建新型电力系统提高稳定性以及抗干扰性具有一定的积极作用。
猜你喜欢
电力自动化设备(2022年8期)2022-08-09
粮食问题研究(2022年2期)2022-04-25
中学生数理化·中考版(2021年10期)2021-11-22
能源工程(2019年6期)2019-12-02
数学物理学报(2018年2期)2018-05-14
电子测试(2017年12期)2017-12-18
中国环境监察(2016年7期)2016-10-23
儿童故事画报·智力大王(2016年6期)2016-09-14
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年5期)2016-03-22