无电解电容五相永磁同步电机驱动系统主动阻尼控制策略*
2024-01-15 06:57颜黎浩
电气工程学报 2023年4期
陈 前 陈 鑫 颜黎浩 史 浩, 韩 鑫
(1.江苏大学电气信息工程学院 镇江 212013;2.上海炫杏实业有限公司 上海 201108;3.华电煤业集团数智技术有限公司 北京 102400)
1 引言
矿用风机驱动系统是煤矿的核心,主要将矿采过程中产生的有害气体排出矿井,同时向下输入新鲜空气,其工作的稳定性和可靠性直接决定了井下矿采作业的安全性[1]。传统的矿用风机驱动系统采用大电解电容来稳定直流母线电压,但受煤矿环境影响,大电解电容易损坏,降低电机驱动器的使用寿命。然而,薄膜电容具有更高的稳定性和使用寿命,更适合工作于环境恶劣的煤矿中[2]。对于使用薄膜电容稳压的逆变器来驱动电机的系统,即为无电解电容电机驱动系统。
单相交流供电的无电解电容驱动器及其控制算法已经在小家电领域广泛应用[3-5],而三相交流供电输入的无电解电容驱动器的直流母线电压产生6 倍电网频率的波动,相较于单相交流供电来说更稳定,其控制技术也更加被看重,主要分为提高电机侧性能和驱动系统稳定运行。在电机侧性能方面,主要为无电解电容的弱磁控制以及过调制算法提高直流母线电压的利用率[6-7]。另一方面随着实际应用的需求,需要考虑电机驱动系统能够长时间保持稳定运行。电网侧电感和薄膜电容形成一个LC 谐振电路,由于LC 谐振,直流母线电压和电网侧电流的波动将会加剧。对于无电解电容电机驱动器的LC 谐振抑制研究,可分为基于硬件的解决方案和基于控制的解决方案。
文献[8-10]通过在无电解电容系统增加无源阻尼电路或者通过无源元件与薄膜电容并联来提高系统的稳定性,这些硬件解决方案的优点都可以有效地抑制LC 谐振。然而,额外的无源元件增加了整个驱动系统的复杂性、体积和成本。
文献[11]提出一种基于整流器电流六次谐波调节的电网电流控制方法来提高电网电流质量并降低母线电压波动。该方法根据电网电流与整流器电流的关系,通过调节整流器电流的六次谐波来控制电网电流以达到稳定运行的目的。但是此方法需要在电网侧增加额外电流传感器,增加了系统成本。文献[12]提出了一种主动阻尼方法,通过使用一个闭环源状态估计器来估计电网源电压和电流,并直接操纵输出电压命令,有效地抑制直流电路母线电压振荡。文献[13]仔细考虑LC 振荡周期和整流器连续导通时间,产生前馈补偿电压抑制谐振。为了进一步提高LC 谐振抑制效果,文献[14]考虑了直流电路电压采样延迟来补偿电压产生。文献[15-16]通过微分控制率来实现对无电解电容系统谐振的抑制,进而提高网侧电能质量。文献[17]通过引入直流电压谐波信号,将系统不稳定的负阻抗特性转化为稳定的正阻抗特性。文献[18]利用带增益的一阶高通滤波器从直流母线电压提取阻尼电压并注入电机中来抑制母线电压的振荡,但作用对象为异步电机。文献[19]考虑了逆变器到电机电流控制回路中有限带宽和开关频率的影响,并给出了直流环节电容器、开关频率的选择建议。文献[20]在此基础上引入直流母线电压的小信号分量重构系统特征方程的系数。通过对不同信号引入方法的比较,证实了比例法是最优解。从阻尼功率到电压分量的变化实现了对系统影响最小的信号注入。
以上关于直流母线电压谐振抑制的控制对象基本为三相电机,关于五相永磁同步电机无电解电容驱动系统的谐振控制策略较少。相同电压条件下五相电机的功率大于三相电机,随着电机负载功率增大,薄膜电容与线路电感形成的LC 谐振振荡更加明显[21]。因此,本文针对五相永磁同步电机无电解电容驱动系统提出直流母线电压LC 谐振抑制策略,通过对无电解电容系统和五相电机建模分析,并判断薄膜电容对驱动系统的稳定性影响,同时提出基于母线电压的主动阻尼控制,使用带通滤波器替换原先的高通滤波器对母线电压提取特定频率的阻尼电流来抑制谐振,且对该方法的谐振抑制机理进行理论分析,最后进行仿真验证控制算法的可行性。
2 无电解电容电机驱动器的建模
2.1 无电解电容永磁同步电机驱动系统特性分析
三相交流输入无电解电容电机驱动系统拓扑结构如图1a 所示,它由三相二极管整流器前端、线路阻抗、薄膜电容C和驱动永磁同步电机的五相逆变器组成。整流桥由六个二极管组成,每一刻只有两个二极管导通,同一桥上的两个二极管同时不导通。因此,电压源可以看作准直流电源vs,简化模型如图1b 所示,将逆变器和五相电机当作电流源(iinv)。Lg=2Lm和Rg=2Rm为输入电源等效串联阻抗。根据图1b的简化电路模型,电感电流ig和电容电压udc满足
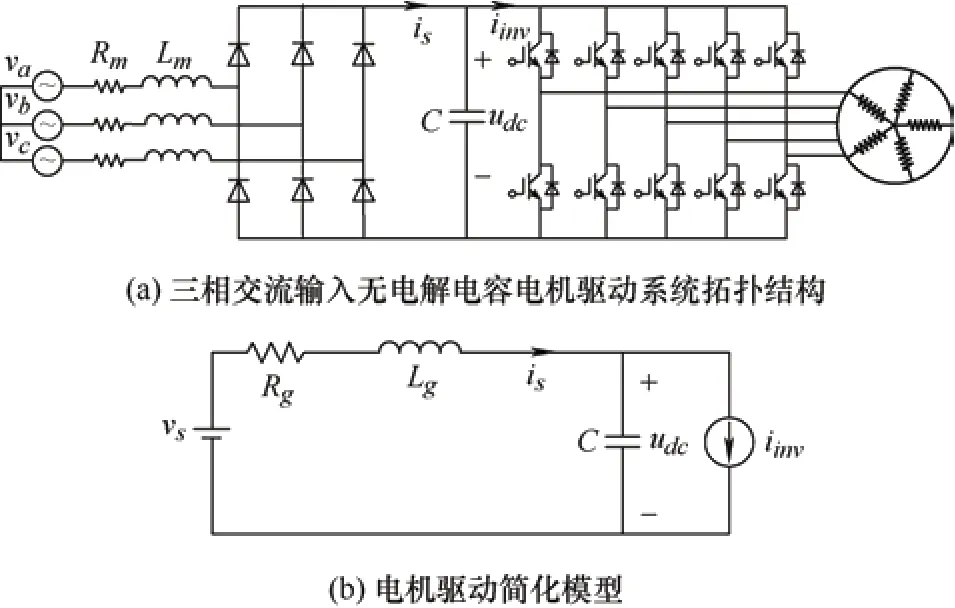
图1 无电解电容电机驱动系统拓扑结构图
式中,is和iinv分别为整流桥输出电流和逆变器输入电流。
由于将永磁同步电机和逆变器视为恒功率负载,逆变器输入电流iinv为
式中,udc0和分别表示直流母线电压udc的平均分量和小信号分量。式(3)的线性化可以表示为
从式(4)可以看出,恒功率负载(Constant power load,CPL)为负阻抗特性。在式(4)线性化的逆变器电流下,结合式(1)、(2)可以得到驱动系统的小信号等效模型,驱动系统的特征多项式可以表示为
由式(5)可知驱动系统的稳定性判据为[19]
在式(6)中,由于Rg的值非常小,而的值非常大,因此可以满足式(6)中的第一个不等式。然而,由于所使用的薄膜电容数值较低,无法满足式(6)中的第二个不等式,同时由于线路中滤波电感Lg和薄膜电容C发生谐振导致直流母线电压振幅过大,驱动系统的稳定性降低。图2 为Lm=2 mH、C=15 μF时电机驱动系统的幅频特性和相频特性曲线。LC 谐振频率为

图2 无电解电容驱动系统的伯德图
2.2 五相永磁同步电机数学模型
从图1 的拓扑结构图可知本次控制对象为五相永磁同步电机。在d1-q1和d3-q3参考坐标系中,电压和电磁转矩方程可以表示为
式中,ud1、uq1、ud3、uq3为d1-q1和d3-q3轴坐标系中的电压;id1、iq1、id3、iq3为d1-q1和d3-q3轴坐标系中的电流;Ld1、Lq1为d1-q1坐标下的电感;Ll3为漏感;Rs为定子电阻;ϕf为永磁磁链;ωe为电角速度;p为电机极对数。
3 基于母线电压的主动阻尼控制策略
通过第2 节分析,由于薄膜电容数值太小且线路电感和薄膜电容发生的谐振导致电机驱动系统不稳定。为了使得电机驱动系统稳定运行,通过负反馈方法来改变电机驱动器的特征方程系数,来满足电机驱动系统稳定运行的条件[18]。
3.1 主动阻尼控制的方法理论
为了抑制线路电感和薄膜电容引起的母线电压谐振,稳定电机驱动系统,本文提出一种基于母线电压的主动阻尼控制方法。图3a 表示为了增加系统的阻尼,在薄膜电容之间并联虚拟电阻。由图3b可知,虚拟电阻产生的阻尼电流实际是流过逆变器侧且对电机不会造成额外损耗,因此通过将阻尼电流叠加在逆变器电流上实现谐振抑制效果。

图3 无电解电容电机驱动系统等效模型图
将阻尼电流添加到驱动系统的状态方程为
添加阻尼电流的无电解电容电机驱动系统的控制框图如图4 所示。阻尼电流由母线直流电压udc产生,通过系数k控制阻尼电流idamp从而影响直流母线电容电流ic,达到抑制直流母线电压谐振的效果。
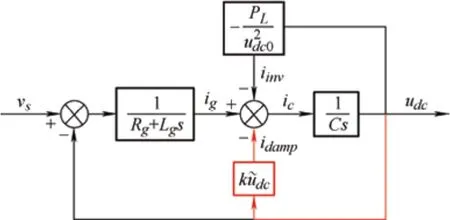
图4 无电解电容电机驱动系统控制框图
系统随k值变化的幅频曲线和相频曲线如图5所示。从幅频特性曲线可以看出,随着k的增大,系统的谐振峰值逐渐减小,因此,所提方法可以有效地抑制线路电感与薄膜电容之间的谐振。
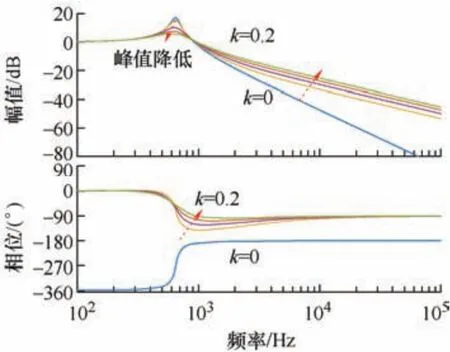
图5 当k 变化时驱动系统的伯德图
然而,在无电解电容的电机驱动系统中,调节流向逆变器的电流并不容易。通过将阻尼电流乘以直流母线电压等效为阻尼功率的Pdamp,如图6 所示。阻尼功率Pdamp可以通过电压指令代替逆变器电流指令来实现,这可以克服在无电解电容电机驱动系统中由相对低带宽的电流控制器所带来的延迟效应。

图6 阻尼功率Pdamp 等效模型图
3.2 阻尼电流idamp 的产生
通过在逆变器侧并联阻尼电流项来抑制母线电压谐振,该方法需要控制逆变器的输入电流,但在开关频率处含有谐波成分,且电机的直轴和交轴电流关系复杂,难以实现有效的控制。因此,将阻尼电流转化为阻尼功率Pdamp,忽略损耗,阻尼功率为
忽略逆变器损耗,可以将五相永磁同步电机功率视为逆变器功率,通过附加的电压命令来实现阻尼功率,可以准确有效地产生基于逆变器功率的阻尼功率,表示为
式中,Δuαβ、uαβ、iαβ分别为附加电压矢量、电机静止坐标系的电压矢量和电流矢量。
所提方法的总体控制框图如图7 所示。在传统五相永磁同步电机矢量控制(Field oriented control,FOC)的基础上增加主动阻尼控制算法来抑制母线电压谐振。阻尼电流idamp是由直流母线电压udc通过带通滤波器(Band pass filter,BPF)和比例系数k产生。同时,根据式(11)将阻尼电流idamp与母线电压udc相乘得到阻尼功率Pdamp,将其转化为电压指令Δuαβ添加到电机电压矢量uαβ上。然而,附加的电压矢量指令被视为对电机驱动系统的干扰。因此,式(12)中Δuαβ分布是一个重要的问题,应当考虑附加电压矢量对驱动系统的影响最小。

图7 基于无电解电容五相永磁同步电动机驱动系主动阻尼控制策略控制框图
由图8 可知,为了尽量减小附加电压矢量对电机运行的影响,选择与定子电流矢量iαβ方向相同的补偿电压矢量。电压指令矢量的最小幅值位于与电流矢量平行的方向,可以减小电压指令对驱动系统的影响。因此,主动阻尼控制算法的附加电压指令是基于由阻尼电流idamp转化的阻尼功率Pdamp生成的。
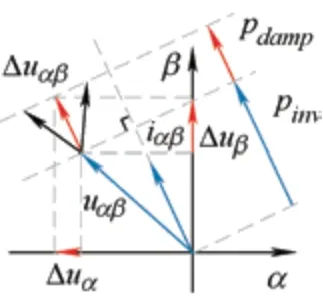
图8 附加电压指令产生
补偿电压矢量可以表示为
4 仿真结果分析
为验证本文提出的主动阻尼控制算法的有效性,在Simulink 上进行仿真验证,薄膜电容数值为15 μF,网侧电感为2 mH。驱动器和五相永磁同步电机的主要参数如表1 所示。

表1 驱动器和五相永磁同步电机主要参数
如图9 所示为电机在额定转速3 000 r/min,额定转矩27 N·m 的条件下,采用本文提出的主动阻尼控制策略和不采用控制策略的直流母线电压和网侧电流整体仿真波形前后对比图。未使用控制算法的仿真波形放大图及傅里叶分析结果如图10a 所示,可以看出线路电感与薄膜电容之间的谐振导致直流母线电压振幅过大达到665 V 且网侧电流明显畸变;采用不同k值的主动阻尼控制方法来抑制谐振,增强系统稳定性效果如图10b、10c 所示。由图10b 可知,使用k=0.1 主动阻尼控制后,直流母线电压的波动振幅从665 V 降到340 V,经傅里叶分析后直流母线电压谐振频率12 倍频(600 Hz)幅值从47.9 V 降至19.3 V,同时网侧电流THD 从77.49%降为45.60%,且7 次和11 次谐波分量均降低。随着k值增加,谐振抑制效果进一步增加。由图10c可知,系数k=0.2 主动阻尼控制后,母线电压波动幅度进一步从340 V 降至210 V,母线电压谐振频率幅值从19.3 V 降至7.7 V,母线电压THD 从50.24%降至16.09%。网侧电流THD 从45.60%降至33.76%。这意味随着调整k值系数,增加阻尼电流抑制谐振,与图5 分析得到随着系数k的改变谐振峰值得到抑制的结论相对应。
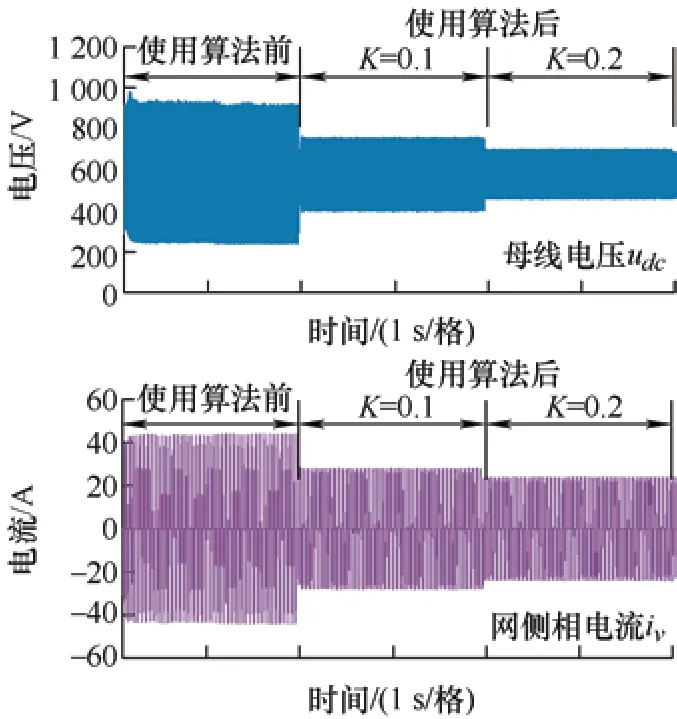
图9 母线电压udc 和网侧电流iv 整体对比图(3 000 r/min)
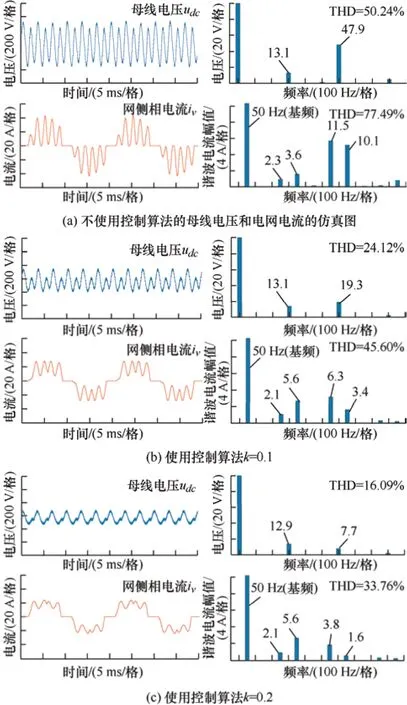
图10 直流母线电压、网侧电流和傅里叶分析波形图(3 000 r/min)
如图11 所示为电机在转速1 500 r/min,额定转矩27 N·m 的条件下,使用控制算法后的母线电压和网侧电流的整体波形。转速下降,电机功率下降,未使用控制算法时母线电压的波动幅值也相应下降。如图12 所示为使用不同k值时母线电压和网侧电流波形,由图12a~12c 可知,母线电压波动幅度从510 V 降至177 V,网侧电流THD 从93.98%降至41.58%,经傅里叶分析,控制算法对母线电压谐振频率幅值抑制到6.4 V,且对网侧电流的5、7、11、13 次谐波都有很好的抑制效果。由图9 及图11 可知对于不同转速,本文控制策略对母线电压谐振抑制都有很好的动态响应。

图11 母线电压udc 和网侧电流iv 整体对比图(1 500 r/min)
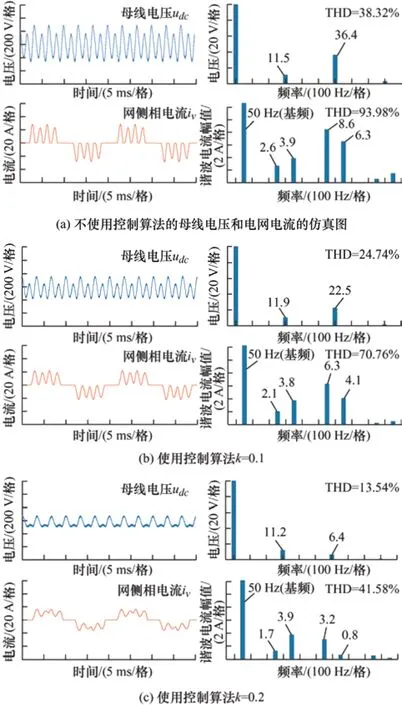
图12 直流母线电压、网侧电流和傅里叶分析波形图(1 500 r/min)
采用主动阻尼的控制策略对母线电压和网侧电流有很好的抑制作用,但附加的电压矢量对于电机侧产生扰动,如图13 所示为五相永磁同步电机电流使用控制算法前后对比。由图14 可知,电机电流THD 从5.3%略微增加到7.2%。
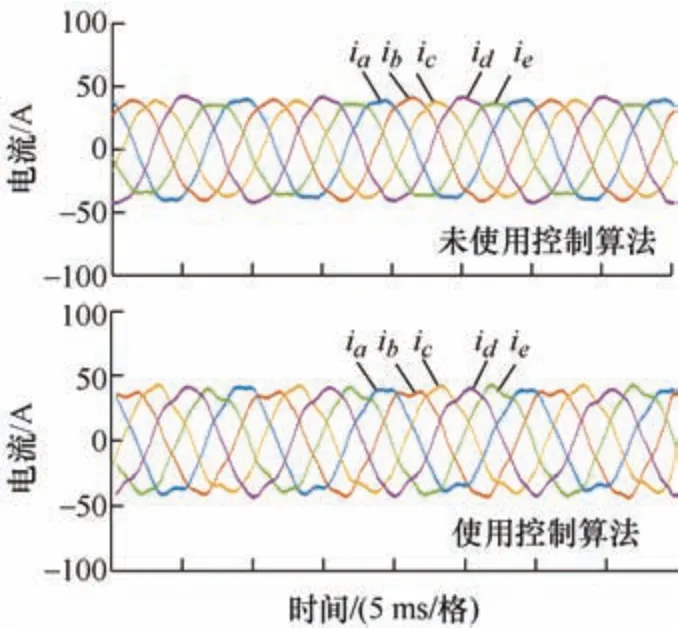
图13 五相永磁同步电机电流使用控制算法前后对比

图14 使用控制算法傅里叶分析前后对比图
5 结论
本文针对五相永磁同步电机的无电解电容驱动系统提出一种直流母线电压LC 谐振抑制策略,主要可得出如下结论。
(1) 针对控制对象为五相永磁同步电机时直流母线电压波动更大的现象,提出使用带通滤波器提取特定频率,避免了电流控制带宽对阻尼频率的影响,使得控制算法谐振抑制效果更好。
(2) 基于所提主动阻尼方法的五相永磁同步电机驱动系统的佰德图,可以随时获得最优参数并实现不同转速下的动态补偿,提高系统稳定性。
(3) 通过理论分析和仿真证明,该方法可以有效地抑制直流母线电压振荡,降低网侧电流THD,提高系统的综合性能。
猜你喜欢
湖南电力(2021年4期)2021-11-05
机电信息(2020年12期)2020-06-29
电源技术(2017年1期)2017-03-20
西南交通大学学报(2016年3期)2016-06-15
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年4期)2016-04-04
电测与仪表(2015年4期)2015-04-12
电测与仪表(2015年5期)2015-04-09
城市轨道交通研究(2015年3期)2015-02-27
自动化与仪表(2014年10期)2014-02-26