
番茄采摘柔性末端执行器设计
2024-01-11 03:01:22钟金鹏刘苏杭
黑龙江工业学院学报(综合版) 2023年10期
童 以,张 华,钟金鹏,吴 凡,刘苏杭
(安徽科技学院 机械工程学院,安徽 滁州 239000)
中国是世界上番茄栽培面积最大、生产总量最多的国家之一[1]。2021年中国番茄产量达6609万吨,较2020年增长1.4%。而番茄采摘是番茄从种植到收获过程中劳动强度最大的工作环节之一,设施大棚番茄的采摘工作基本上都依靠人工,采摘劳动强度高、成本高[2]。随着科技的不断发展,番茄采摘机器人逐渐成为替代人工完成采摘新的解决方案,番茄采摘机器人可以降低劳动强度、提高农业生产效率、降低生产成本、保证果蔬适时采摘。采摘机器人将成为未来智慧农业发展的重要方向之一,具有很大的发展空间和市场需求[3-4]。
国外在采摘机器人的研究方面起步较早,中国在进入21世纪后虽然奋起直追但仍然落后,目前国外在采摘机器人研究上已经取得了一定的成果,并逐步向商业化发展[5-6],国内迄今为止采摘机器人的发展仍停留在实验室阶段。
末端执行器作为采摘机器人与采摘果蔬直接接触的关键部件,直接影响采摘的成功率、采摘效率以及果蔬损伤率[7-8]。目前,传统的工业刚性末端执行器被应用于果蔬采摘中,刚性末端执行器在夹取果蔬时,或多或少会对果蔬造成损伤,采摘效果不理想。目前的研究热点是柔性末端执行器,它能够顺应果蔬的形状、大小夹取果实,具有较好的自适应能力,从而实现无损采摘[9-10]。
1 柔性末端执行器设计
1.1 结构设计及工作原理
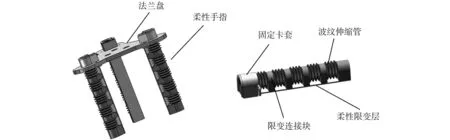
现今采摘末端执行器趋向柔性发展,但面临夹取损伤高、柔性化低以及制作成本高等问题[11]。针对以上问题设计了一款气动柔性三指末端执行器,3个柔性手指通过固定卡套安装在法兰盘上。每个柔性手指包括波纹伸缩管、柔性限变层、限变连接块3部分,如图1(a)所示。其中波纹伸缩管主要参数包括:波纹管单节长度L、波长、壁厚、气管内径d1、波纹管顶峰圆直径d2、波纹管单节波纹数n,如图1(b)所示。
(a)
设计的气动柔性三指末端执行器结构简单,采用气压驱动使得在采摘作业中,夹爪可以产生自适应包裹,不仅减少了采摘夹取损伤,也因其自适应特性增加了采摘的通用性。
该结构是将3节相同长度的波纹伸缩管与柔性限变层组合,波纹伸缩管的气室在通入正气压后,每一节气室会伸长,在通入负气压后,每一节气室会收缩变短。柔性限变层的长度是固定不变的,在波纹伸缩管伸长或缩短过程中,会产生变形差,从而使得柔性手指能够产生正向伸长弯曲和反向收缩弯曲,即实现抓取和松放。
1.2 结构尺寸分析
番茄作为采摘对象,需测量番茄的几何尺寸为末端执行器的设计尺寸提供参考。本研究以皖杂18号番茄作为采摘对象,随机选取成熟期番茄,用游标卡尺测量番茄的横径ht和纵径hv,如图2所示,再计算出他们的均值,样品重量使用电子秤进行测量,番茄的几何尺寸测量方法与结果统计如表1所示。

表1 番茄几何参数
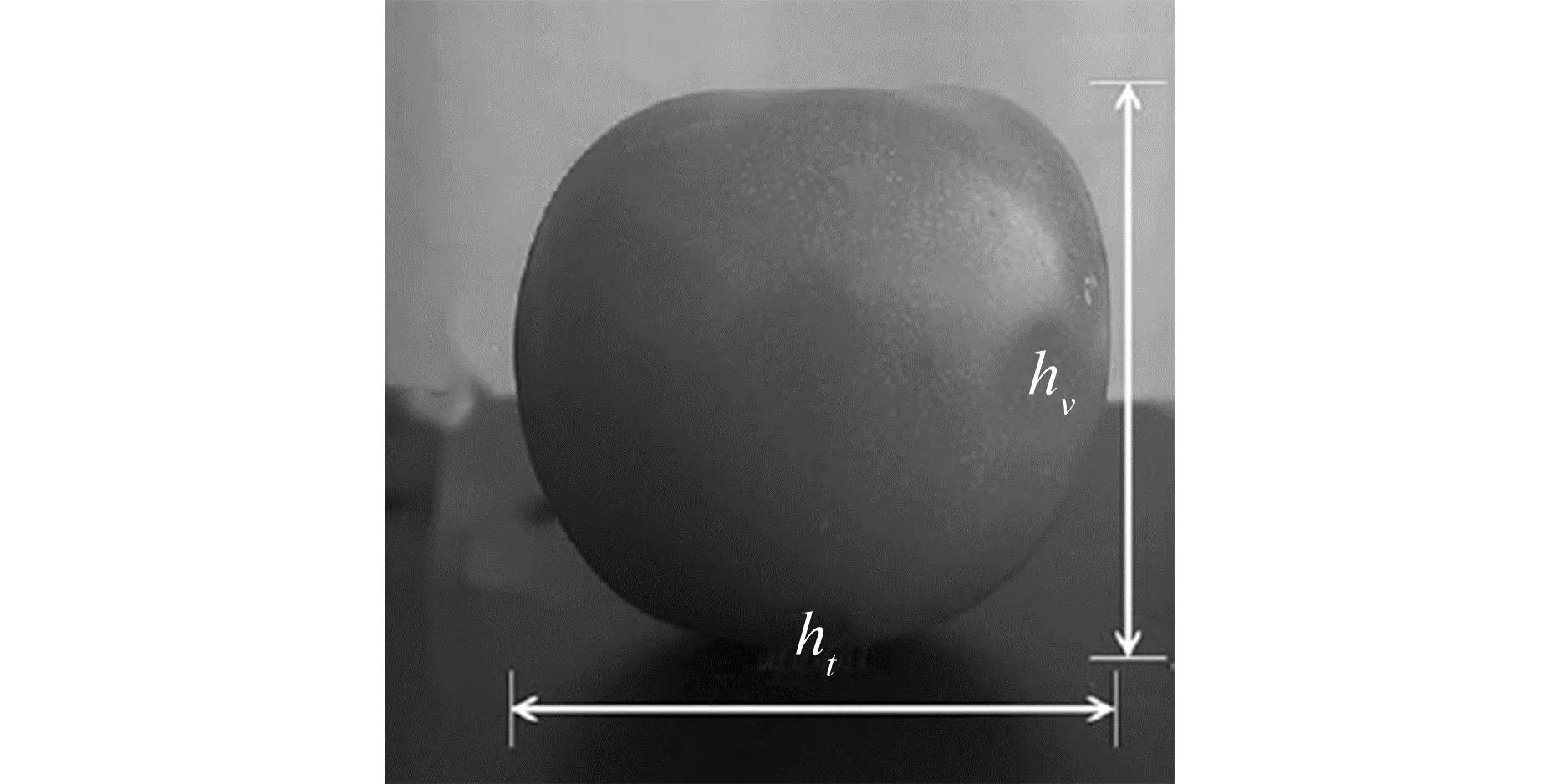
图2 番茄几何尺寸测量
球度表示物体实际形状与球体的接近程度,因此,通过公式(1)计算番茄的几何平均直径d(mm),通过公式(2)计算果实的球度(%),以此表示番茄果实的形状特征。
d=(L×H)1/2
(1)
式(1)中:
d—几何平均直径,mm;
L—番茄横向平均宽度,mm;
H—番茄纵向平均高度,mm。
(2)
式(2)中:
Sρ—球度,%;

dc—物体最大直径,近似为宽度和高度中相对大的值,mm。
通过计算,番茄的平均球度约为92.3%,因此可以将番茄近似为球体,基于以上数据,末端执行器设计要能实现夹持50~80mm的球体。
以番茄最大直径(φ)80mm为例分析手指尺寸,如图3所示,手指最小长度L应大于以80mm为直径圆的1/4圆弧,为满足使用要求,则柔性手指长度近似不小于62mm。同时在采摘小型果蔬时,3根手指在弯曲包裹过程中不能因手指过宽而相互干扰,造成抓取失败。故手指宽度不能过大,以番茄最小直径50mm为例,则手指宽度不能大于外切正三角形边长,为满足使用要求,则柔性手指宽度近似不大于86mm。
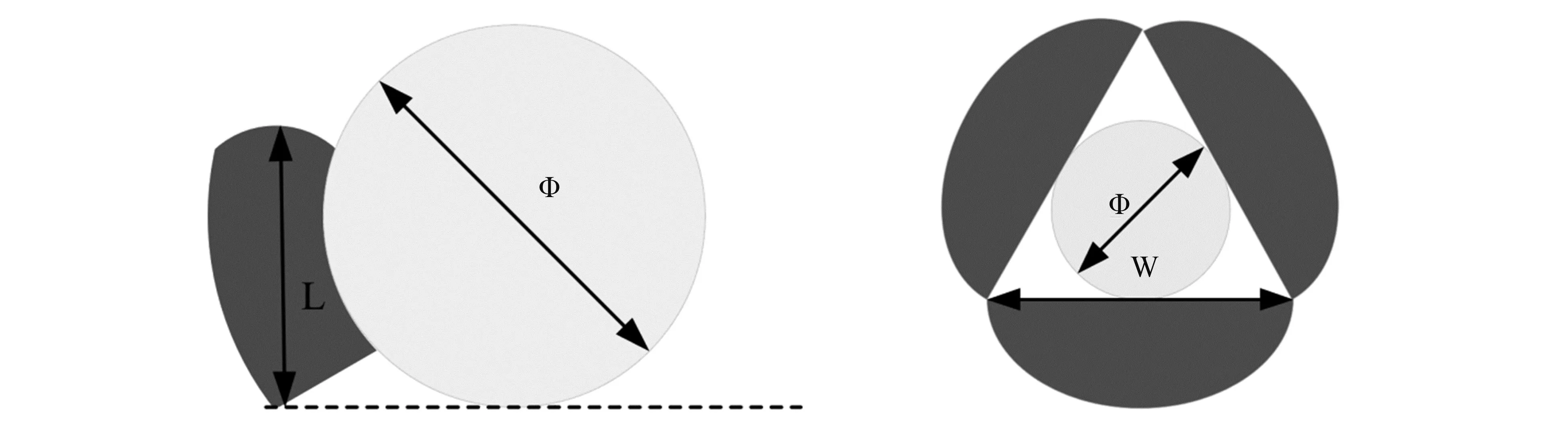
图3 手指尺寸分析
基于以上分析,柔性手指尺寸设计为:波纹管单节长度L=12mm、波长b=3mm、壁厚h=1mm、气管内径d1=3mm、波纹管顶峰圆直径d2=18mm、波纹管单节波纹数n=4,手指总长108mm,指宽20mm。
2 柔性末端执行器运动学模型
2.1 运动学建模分析
软体机器人或软体结构末端执行器多采用弹性材料,对它的建模和运动分析较为困难[12]。针对这一问题,研究者们提出了不少适用于软体结构的建模方法,分段恒定曲率方法是目前使用的最为广泛的一种建模方法[13]。
分段恒定曲率运动学模型可以用于描述软体致动器末端位姿的运动。它能够将机器人的运动学分解成为相互独立的两个映射,如图4所示。一个是从软体致动器的空间q,变换成描述恒定曲率的圆弧参数的配置空间,关联机器人的自身结构。另一个映射则是从这个配置空间转换成任务空间,由描述沿着主干的位置和方向的一个空间曲线构成[14]。

图4 恒定曲率运动学三个空间及其映射
从致动器空间q到描述圆弧参数(k,θ,l)的配置空间的特定映射f1是特定的,每个不同的致动器,都以不同的方式影响着圆弧参数。相比之下,由圆弧参数(k,θ,l)到沿着主干的姿态x的映射f2是独立于机器人的,与机器人自身区别开来,所以它适用于符合分段恒定曲率假设的所有机器人设计[14]。
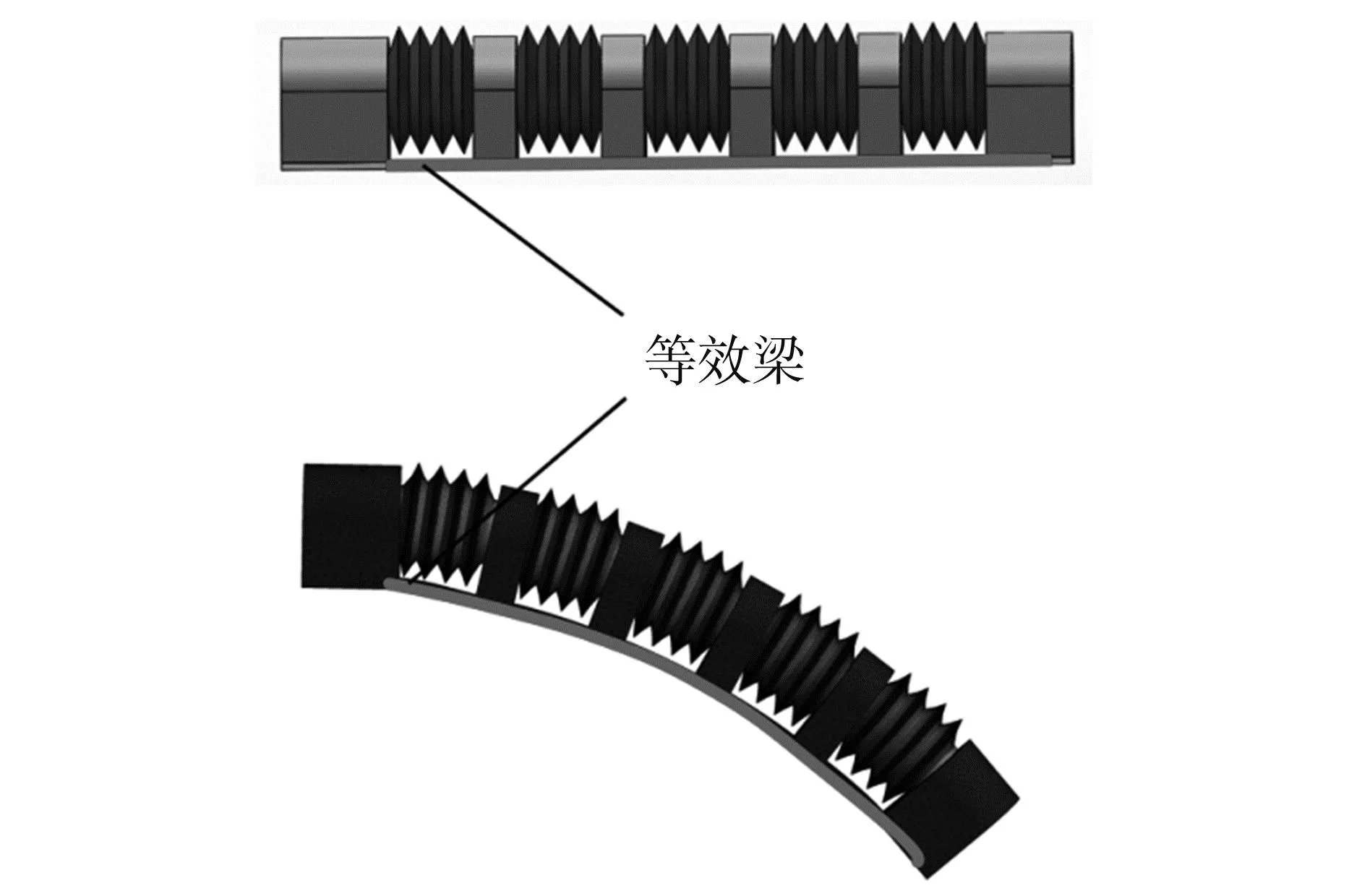
本文设计的气动柔性末端执行器包含多个组成部分,在对柔性手指各部分的运动状态进行分析时,计算复杂,难以准确的进行描述。所需要的计算量会比较大,过于复杂。所以需要对结构模型进行简化,在分段恒定曲率的模型中常用的一种简化方法是基于“欧拉-伯努利梁力学”的简化方法,它是将梁的运动学描述等效为沿梁施加恒定力矩后偏转的圆弧。柔性手指依靠波纹伸缩管的伸长和缩短带动柔性限变层弯曲,在采摘过程中,与果蔬贴合的部分也是柔性限变层,所以不必准确描述波纹伸缩管每节波纹的位置及姿态,而柔性限变层长度固定。故可以将柔性手指简化为分段恒定曲率梁模型,将柔性手指整体等效成长度恒定的梁模型,即参数l固定。
2.2 柔性手指的末端位姿表示
目前常用的机器人运动学建模方法是D-H法,它可与分段恒定曲率方法的参数建立直接的关系,采用分段恒定曲率的框架,软体机器人运动学建模与自身的结构设计无关,配置空间和任务空间之间的映射可以使用分段恒定曲率方法和D-H法实现,用此方法,即可得到柔性手指的末端中心位姿[14]。
柔性手指在波纹伸缩管加载气压下的弯曲状态如图5(a)所示,将它等效为长度不变的梁模型,整根梁可以划分为无数个曲率恒定的微小弧段,每个微小的弧段都可以采用圆弧参数(k,θ,l)进行描述。在微小弧段上建立如图5(b)所示的坐标系:在顶部中心点建立坐标系{xi-1,yi-1,zi-1},原点为Oi-1,在底部中心点建立坐标系{xi,yi,zi},原点为Oi。Oi-1Oi对应的圆弧弧长为li,轴线zi-1和zi与圆弧相切,点Oi-1和Oi为切点,坐标轴xi-1和xi分别指向点Oi-1和Oi与腔体中心的连线方向,φi为圆弧线所在平面与轴xi-1的夹角,ρi为圆弧的曲率半径,θi即为这一微小弧段的弯曲角度。
(a)
通过对圆弧所在截面的几何关系可计算出两坐标原点Oi-1和Oi之间的距离,圆弧截面如图6所示,计算得出Oi-1和Oi之间的距离为:

图6 圆弧所在截面集合关系
(3)
要实现从坐标原点Oi-1到Oi的变换,需经过一系列的旋转与平移完成,具体步骤如图7所示。
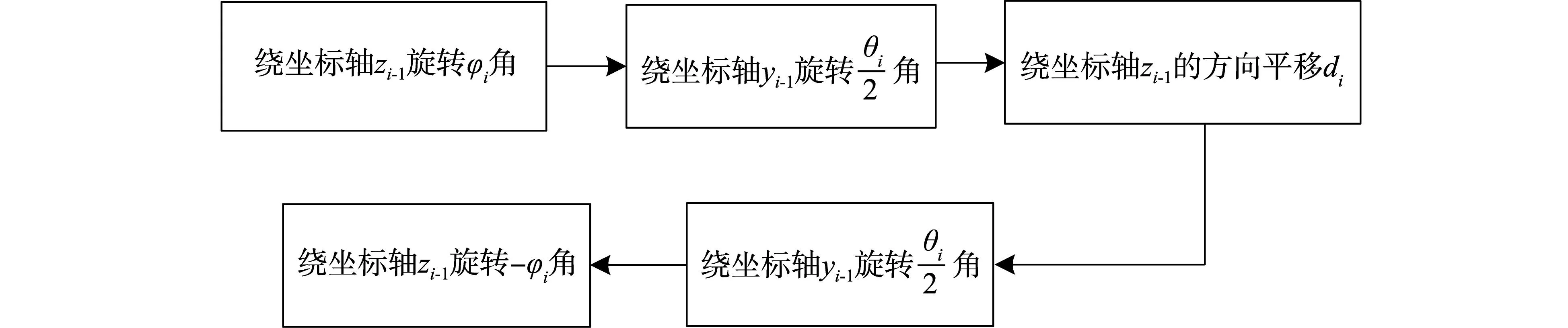
图7 原点坐标变换步骤
依据上述变换步骤,可以建立描述柔性手指第i段圆弧坐标变换的D-H参数表,如表2所示。

表2 第i段圆弧D-H参数表
坐标变换矩阵i-1Ti可以用5个基本变换矩阵表示为:
(4)
其中R(.)表示旋转矩阵,T(.)表示平移矩阵。
基本变换矩阵分别如式(5)-式(9)所示。
(5)
(6)
(7)
(8)
(9)
带入公式(4)中,得到坐标变换矩阵为:
(10)
由坐标变换矩阵的关系,得到由n段圆弧组成的柔性手指的末端坐标变换矩阵如式(11)所示。
(11)
由公式(11)可以得到柔性手指的末端位置和末端姿态,柔性手指的末端坐标(x,y,z)可以表示为:
(x,y,z)=(px,py,pz)
(12)
柔性手指的末端姿态用欧拉角表示为:
(13)
针对柔性手指建立的运动学模型,可以进一步推算出柔性手指指尖在不同压力时的位置坐标及空间姿态,但模型复杂,计算量较大,采用仿真分析的方法可以更加便捷直观的得到压力与柔性手指运动的关系,故拟采用仿真方法进行进一步分析。
3 柔性手指仿真分析
3.1 柔性手指波纹管伸缩性能仿真
对本研究中设计的柔性手指波纹伸缩管使用ANSYS进行有限元仿真,验证设计的波纹伸缩管的伸缩变形能力,确保柔性手指具有良好的弯曲能力。
使用SOLIDWORKS建立三维模型后导入ANSYS进行有限元仿真,材料模型采用Mooney-Rivlin超弹性模型进行描述,模型参数设置为C10=0.2897,C01=0.0599。网格划分后,波纹伸缩管的进气端端面设为固定支撑,往腔体内表面分别加载正负气压载荷,并忽略重力的影响,计算完成后得到如图8所示的伸缩变形图。气压载荷以10KPa为增量,分别计算-20~120KPa的波纹伸缩管的变形情况,得到如图9所示的波纹伸缩管变形量与输入气压之间的关系图。
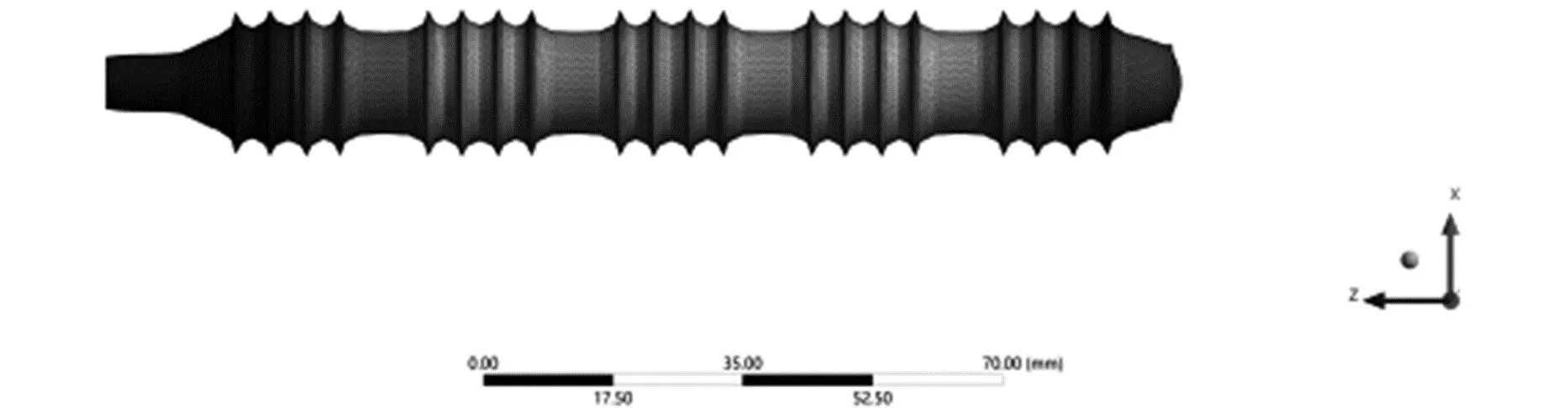
(a)正气压
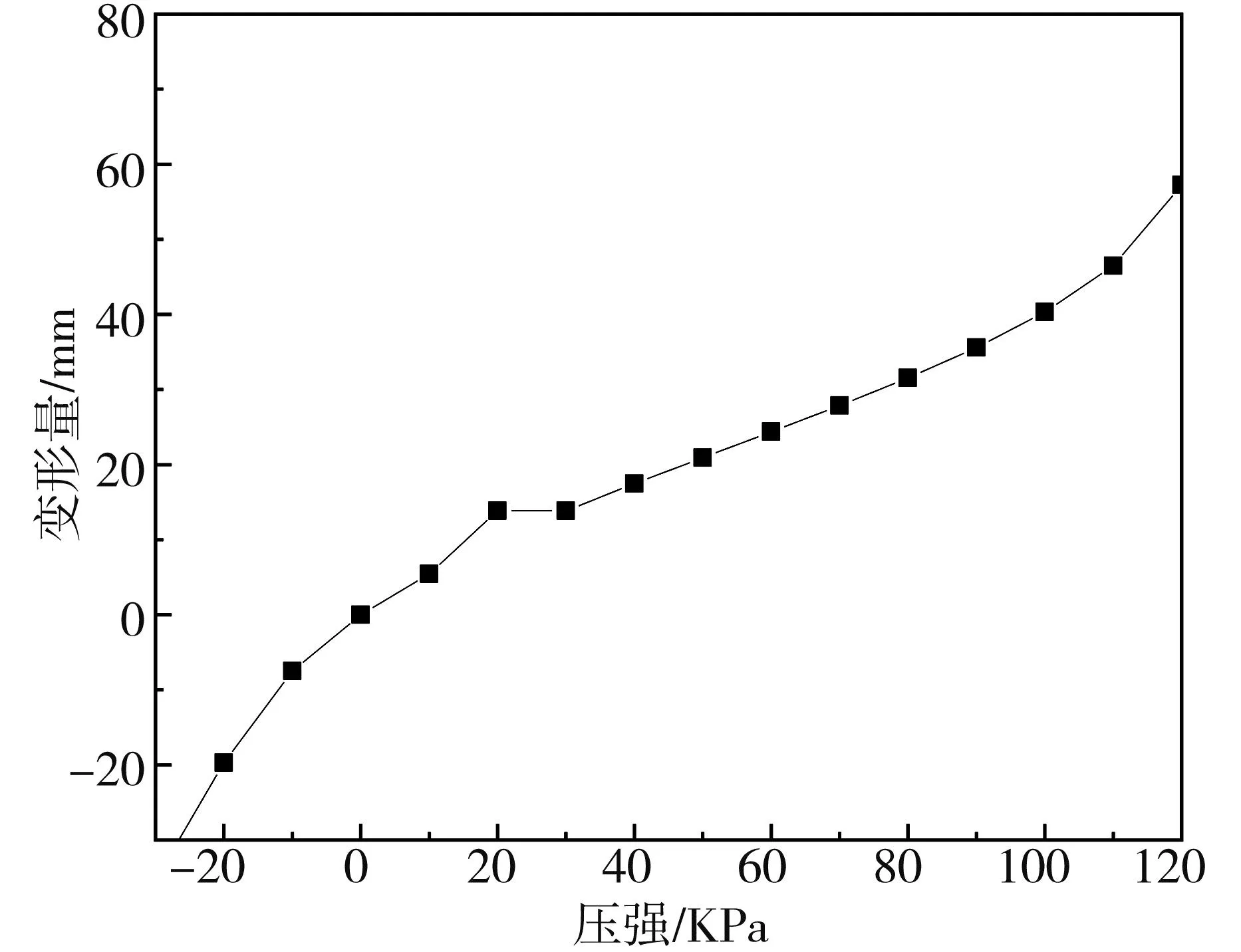
图9 波纹伸缩管变形量与输入气压关系图
由图9可以得出,设计的柔性手指波纹伸缩管伸缩变形能力较好。通入正气压时,气压越大伸长量越大,在120KPa的正气压时,波纹伸缩管伸长了57.26mm;在往腔体内通入负气压时,负气压越大收缩量越大,因为本研究中设计的柔性手指本只需要完成小幅度的松开动作,不需要波纹伸缩管有太大的收缩量,故只需分析到-20KPa的负气压,在-20KPa的负气压时,波纹伸缩管收缩了19.71mm。
3.2 柔性手指弯曲性能仿真
波纹伸缩管伸缩变形性能已经得到验证,继续对柔性手指进行整体的弯曲性能仿真验证。使用SOLIDWORKS建立装配体模型后导入ANSYS进行有限元仿真,波纹伸缩管材料模型与前文设置一致,柔性限变层、限变连接块材料均为江苏革方新材料公式的硅橡胶材料,材料模型采用Yeoh模型描述,模型参数设置为C10=0.98,C20=0.37;设置接触为绑定;网格划分后,波纹伸缩管的进气端端面和底部限变连接块的底面设为固定支撑,往腔体内表面分别加载正负气压载荷,并忽略重力的影响,计算完成后得到如图10所示的弯曲变形图。气压载荷以10KPa为增量,分别计算-40~120KPa的柔性手指弯曲变形情况,得到如图11所示的柔性手指弯曲综合变形量与不同气压之间的关系图。
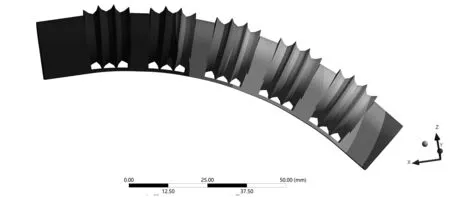
(a)正气压
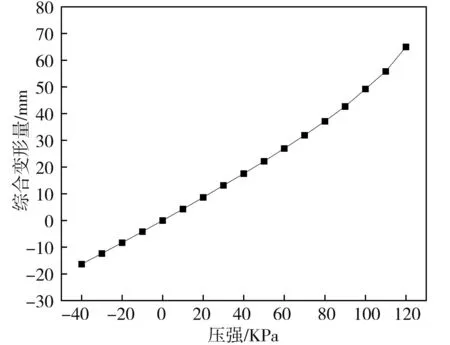
图11 柔性手指弯曲综合变形量与输入气压关系图
由图11可以得出,设计的柔性手指具有良好的弯曲变形能力。正气压越大手指正向弯曲综合变形量越大,负气压越大手指反向弯曲综合变形量越大。
图11显示的是不同压强下的手指综合弯曲变形情况不能直接显示手指的弯曲角度,弯曲角度需根据仿真结果及弯曲综合变形量进行测算,具体测量方法如图12所示。以柔性手指根部到顶端的连线与水平线的夹角θ为柔性手指的弯曲角度则:

图12 弯曲角度测量方法
(14)
式(11)中,s为柔性手指长度,x,y分别为手指末端弯曲后在以手指底部端点为原点的三维坐标系上的x,y方向的位移,位移量可根据ANSYS仿真结果进行定向测算得出;通过计算得出不同压强下的柔性手指弯曲角度,并根据结果进行非线性拟合,如图13所示。
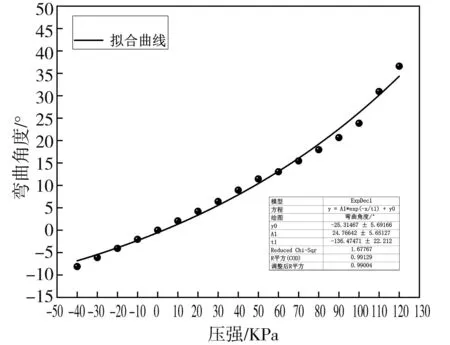
图13 不同压强下的柔性手指弯曲角度
经过非线性拟合后得到拟合方程如式(15)所示。
(15)
式(15)中,θ—手指弯曲角度;p—压强。
4 样机制作与验证
4.1 样机制作及试验测试
通过采购硅橡胶材料制作柔性零部件和3D打印机打印非柔性零部件进行样机制作,最终的样机实物如图14所示。
制作出末端执行器的实物之后,在试验测试平台上对柔性手指能进行测试,如图15为试验测试平台,主要包括电源、微型气泵、Arduino开发板、气压传感器、柔性手指、固定支架、参考板、PC。用固定支架固定柔性手指的进气端,电源通电后,将微型气泵的旋钮旋转调节气压大小,气压大小通过传感器检测后在PC上的程序串口监视器显示。
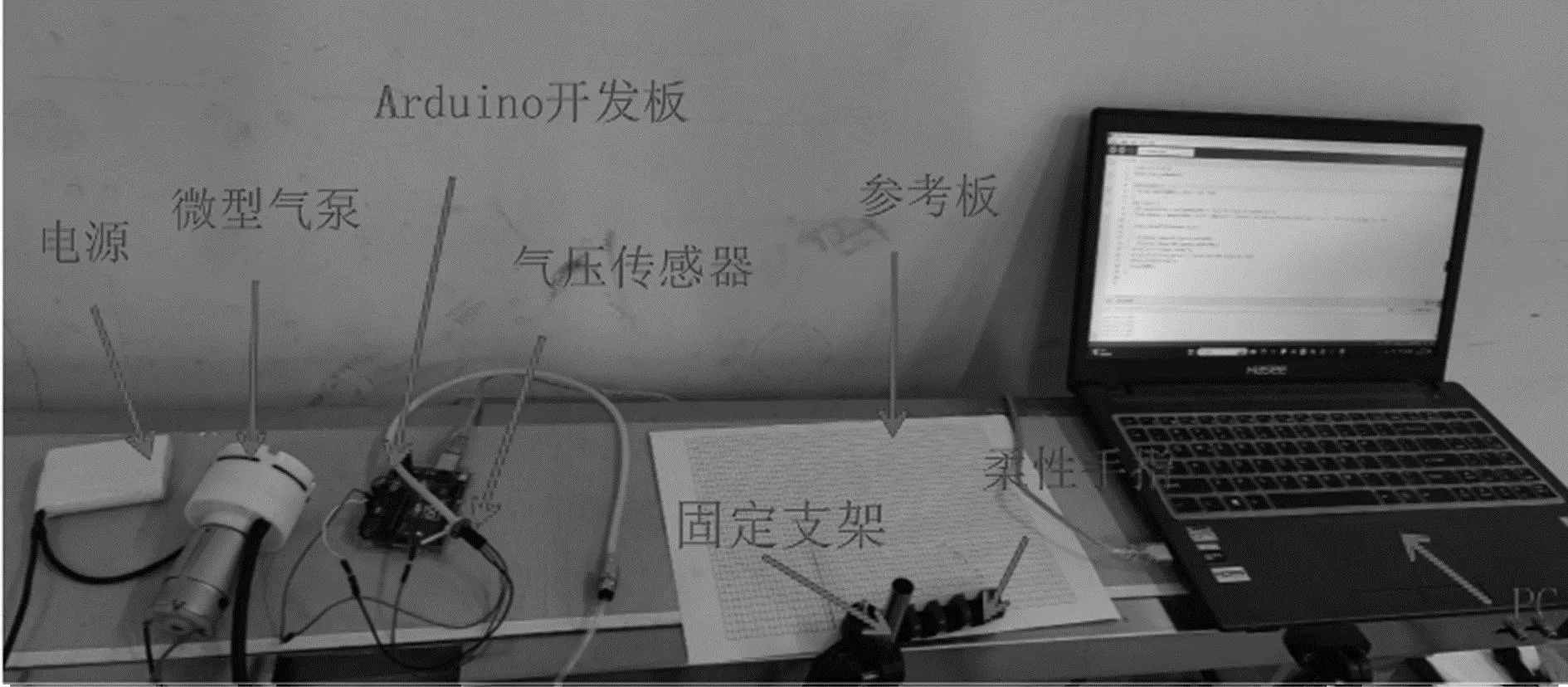
图15 试验测试平台
试验通过在柔性手指气室腔体内通入0KPa至120KPa的驱动气压,每次测试都在参考板上标记指尖端点位置,测得柔性手指不同驱动气压时的弯曲变形情况,如图16所示。然后将试验数据连同有限元仿真数据绘制成点线图,如图17所示,其中柔性手指的弯曲角度测量方法与图12所示一致。
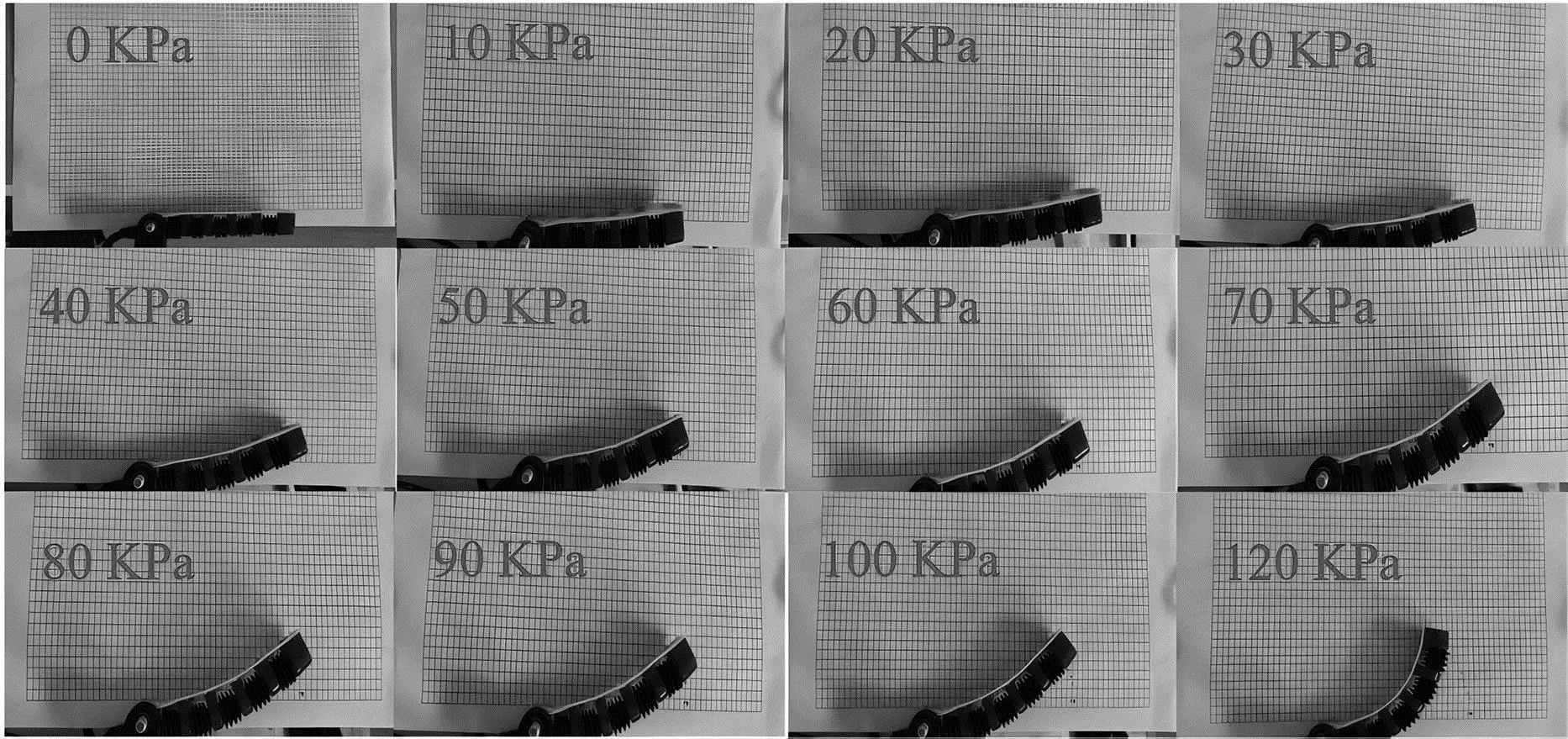
图16 柔性手指不同驱动气压时的弯曲变形
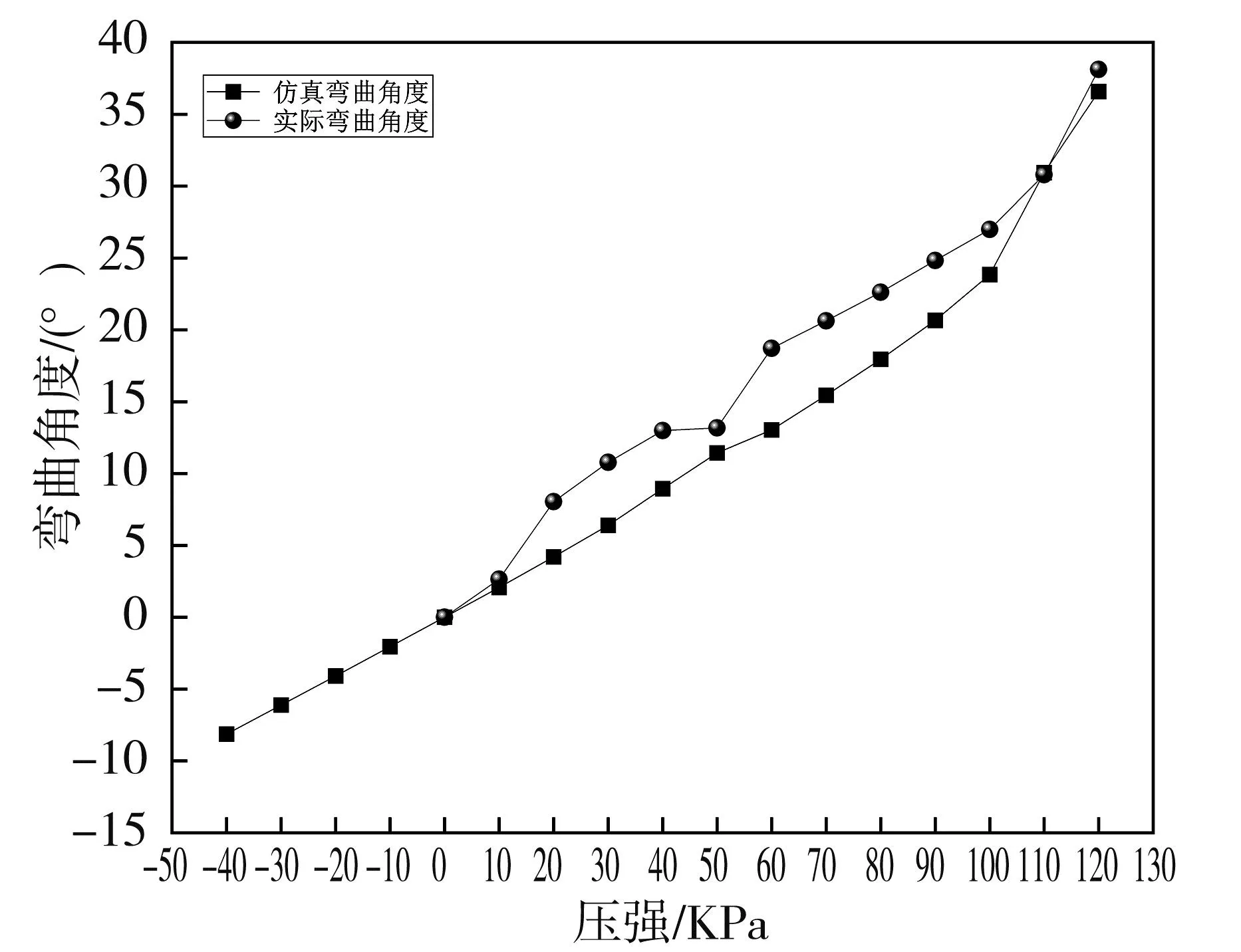
图17 柔性手指弯曲变形仿真与实际试验结果对比
试验结果表明,柔性手指在加载气压下实现了弯曲运动,弯曲角度随着输入气压的增大也逐渐增加,但弯曲角度与输入气压的关系与仿真结果有出入。造成这种偏差的原因可能有:
(1)柔性手指的各部分连接处有摩擦,仿真中简化忽略了摩擦力的影响;
(2)仿真中的材料模型是在理想的情况下设置的材料参数,实际试验中的材料模型与仿真中的模型参数存在偏差;
(3)实际试验时,手指尖端会有抖动现象,测量结果存在偏差。
4.2 样机抓取试验及强度验证
进行番茄抓取试验验证末端执行器强度,选取大小形状不一的番茄进行抓取试验,如图18(a)所示。抓取试验采用手持末端执行器的方式,末端执行加压后依次抓取不同番茄,如图18(b)所示。

(a)番茄样本
试验结果表明,末端执行器可以实现对番茄的自适应包裹,具备柔性抓取的能力,末端执行器整体强度满足抓取过程的强度要求。
5 结论与展望
设计的番茄采摘柔性末端执行器,通过正、负压驱动波纹伸缩管带动柔性限变层弯曲,实现番茄的自适应抓取。参考分段恒定曲率的方法,将柔性手指等效成长度不变的梁模型,建立了柔性手指的运动学模型。使用ANSYS软件对波纹伸缩管及柔性手指进行有限元仿真分析,得到不同气压强度下的波纹伸缩管伸长量及柔性手指弯曲角度之间的关系,正气压越大波纹管伸长量越大,手指正向弯曲变形量越大;负气压越大波纹管收缩量越大,手指反向弯曲变形量越大,并得出弯曲角度与气压之间的非线性拟合方程。最后制作了样机,搭建了试验测试平台对柔性手指的实际弯曲情况,进行了样机抓取番茄试验,结果表明,柔性手指可以达到预期的设计目标,但手指实际弯曲情况与仿真情况存在偏差并分析了偏差原因,末端执行器可以实现对番茄的自适应包裹,具备柔性抓取的能力,末端执行器整体强度满足抓取过程的强度要求。
本研究只在结构设计及实物验证部分做了工作,未针对末端执行器的整体采摘部分进行研究,下一步将进行结构设计的优化并依托样机进行实际采摘方面的具体研究。
猜你喜欢
建材发展导向(2022年4期)2022-03-16 06:11:48
北京航空航天大学学报(2021年6期)2021-07-20 07:23:52
阅读(低年级)(2021年10期)2021-03-08 01:26:37
科学技术创新(2020年6期)2020-04-18 06:17:46
测控技术(2018年12期)2018-11-25 09:37:50
制造技术与机床(2017年9期)2017-11-27 02:13:45
学与玩(2017年5期)2017-02-16 07:06:26
自动化学报(2016年8期)2016-04-16 03:38:51
自动化学报(2016年5期)2016-04-16 03:38:49
机械工程师(2015年10期)2015-02-02 01:13:57
