海底小目标高分辨合成孔径声呐成像技术研究进展
2024-01-08 03:52:10任露露陈世平王朋张鹏飞周跃涛黄海宁
哈尔滨工程大学学报 2023年11期
任露露, 陈世平, 王朋, 张鹏飞, 周跃涛, 黄海宁
(1.中国科学院声学研究所, 北京 100190; 2.中国科学院大学, 北京 100049; 3.中国科学院 先进水下信息技术重点实验室, 北京 100190)
随着海洋技术和水声技术的发展,人类对海洋的认知需求和活动也日益增加,对水下目标的搜探能力要求也越来越高。声波是水下唯一可以远距离传播的能量形式,利用水声信号的海底目标高分辨成像技术已成为水下目标探测、海洋监测、海洋工程、海洋科学研究等方面必不可少的手段。不同于传统光学图像,成像声呐受限于声波波长、复杂的传播环境及目标在底质背景下的耦合散射特性,水声图像的成像质量、分辨率往往难以提高,因此海底小目标高分辨成像技术是解决水下小目标快速探测、精确识别的重要技术途径。
针对水下小目标高分辨探测的需求,水下小目标成像分辨率、效率等指标也逐渐向更高标准和更高水平的方向发展[1],兼顾水下小目标高分辨成像与搜探效率的成像技术成为了国内外研究的重点与热点内容。20世纪60年代,合成孔径声呐(synthetic aperture aonar, SAS)技术的相关研究由美国Raytheon公司的一份SAS可行性分析报告开启,其基本原理与合成孔径雷达类似,利用小孔径基阵的运动虚拟形成大孔径,利用多帧回波信号的相干叠加实现方位向高分辨成像[2],其高分辨成像的核心蕴含在运动中。与传统的实孔径声成像技术相比[3],合成孔径声呐的主要特点表现在:1)方位向为恒定线分辨率(方位向分辨率与距离无关),其理论值与基阵物理尺寸相关,可兼顾高分辨成像与高搜探效率;2)由于其方位向分辨率与频率无关,可实现低频声波的高分辨成像,解决掩埋目标探测的难题;3)其多帧回波信号的相干叠加处理,能够提升小目标(类点目标)的成像能力,适合用于漫散射背景下的点目标检测,如混响背景下的水雷探测;4)可结合低频声波的远距离传播性能,解决成像声呐作用距离近的困境,显著提升成像声呐的测绘效率。基于合成孔径声呐的上述优势,其已经在水下小目标探测、失事目标搜探、水下考古、水下矿物质调查、水下施工及检查等军用民用方面发挥着不可替代的作用,并在未来海上安全方面具有广阔的应用前景。
20世纪六七十年代提出合成孔径声呐技术用于水下目标高分辨成像探测时,面临的问题主要包括:1)复杂的水声信道(信道空时变化特性)是否能够满足孔径合成的相干性问题。水声信号传播受到信道调制,其相干性的变化是影响孔径合成的主要因素。经过科研人员对水声传播性能的深入研究,国内外科学家开展了一系列试验,验证了孔径合成的有效性[4-6];2)由于声波传播速度远小于电磁波传播速度,合成孔径声呐的测绘效率受到极大限制。在研究初期,测绘效率问题成为制约合成孔径声呐实用化的关键问题。经过数十年发展,合成孔径声呐已经成为小目标高分辨成像的最重要技术手段,其面临的主要问题也发生了转变。现阶段主要的问题包括:
1)高精度的成像能力。运动是合成孔径声呐的前提,但也给高分辨成像引入了误差,如何获取更高精度的成像能力,需要精确的运动误差估计与补偿技术;
2)高搜探效率能力。随着小目标搜探任务能力需求的提升,高搜探效率高分辨成像能力也成为了现阶段的突出问题,亟待解决;
3)复杂环境下的高分辨成像能力。随着合成孔径声呐技术的应用推广,在浅水、复杂底质、复杂背景环境下的高分辨成像技术也成为一项重要的研究课题,包括多途抑制、高海况下的自适应成像等问题。
针对合成孔径声呐面临的主要问题,本文对合成孔径声呐高分辨成像的基本原理、运动误差估计与补偿技术、高测绘效率成像技术、非稳定直航下的高分辨成像技术进行了介绍,分析并展望了未来海底小目标高分辨成像的主要发展趋势。
1 海底小目标高分辨成像基本原理
合成孔径技术应用于海底小目标高分辨成像搜探任务,可采用单基地、双基地或多基地结构,工作方式包括条带式、聚束式、下视三维成像等[7-15]。现阶段合成孔径声呐多采用单基地条带式成像模式,采用多频工作模式,能够对海底的沉底、悬浮以及掩埋物体实现高分辨成像。
1.1 成像场景
侧视合成孔径声呐工作方式的成像场景如图1所示。声呐沿着方位向运动,并且周期性的向斜下方发射声脉冲,声波经过目标、海底等物体散射后,由接收基阵接收回波信号。图1场景中,y轴为方位向,即声呐前进方向;x轴为地距向;z轴为垂向。依据声呐波束开角、目标距离可得到虚拟孔径长度。合成孔径声呐工作过程中,通常将三维坐标投影到二维平面,该平面称为斜距平面,由方位向和斜距向2个维度组成。在斜距平面内,随着声呐的运动,声呐与目标间的距离会不断变化,当距离最小时,表示为R0,该时刻也称之为零多普勒时刻。在垂向上,合成孔径声呐与地面之间的距离称为距底高度,表示为h。合成孔径处理分为距离向和方位向处理,通过二维信号处理形成高分辨图像。

图1 合成孔径声呐成像场景Fig.1 Imaging scene of SAS
1.2 距离向脉冲压缩
声呐系统中通过声脉冲信号对目标的距离进行测量,假设发射信号为CW信号,脉冲持续时间为Tr,依据脉冲测距原理,距离向分辨率可以表示为:
(1)
式中c表示声波传播的速度。显然,距离分辨率与CW信号脉冲时间长度成正比。为了提高距离分辨率,应尽可能使用短时间脉冲,但是发射脉冲时间过短会限制声呐作用距离。
为了在保证距离分辨率的情况下提高作用距离,合成孔径声呐采用线性调频(linear frequency modulation, LFM)信号,通过脉冲压缩解决分辨率与作用距离之间的矛盾。通过发射展宽脉冲提高信号的平均发射功率,进而提高信噪比。假设脉冲持续时间为Ts,合成孔径声呐发射信号的复数形式可表示为:
er(t)=wr(t)exp{jπKrt2}
(2)
式中:t为时间变量,s;Kr为线性调频率,Hz/s,wr(t)为信号的矩形包络:
(3)
脉冲压缩的本质是匹配滤波,可通过时域卷积或频域相乘的方式实现。滤波核函数为发射信号经过时间反褶的复共轭:
(4)
在大时间带宽积(time bandwidth product, TBP)条件下,匹配滤波后的输出信号近似为sinc函数,表示为:
eout(t)=er(t-t0)*h(t)≈Tsinc{KrT(t-t0)}
(5)
式中t0表示接收信号的延迟。输出信号的-3 dB带宽可表示为:
ρxt=1/(KrT)=1/B
(6)
式中:B表示发射信号的带宽;ρxt为时间量纲下的脉冲分辨率,乘以声速,可得距离分辨率为:
(7)
由此可见,距离分辨率仅与发射脉冲的带宽有关。保持脉冲时间宽度不变,信号调频率越大,则发射信号的带宽越大,距离分辨率越高。
1.3 方位向高分辨成像原理
采用实孔径技术进行目标成像时,方位向分辨率与基阵孔径以及声波波长有关,其成像分辨率表现为角度分辨率。基阵物理尺寸D与声波波长λ0共同决定了波束宽度,可用-3 dB波束宽度表示:
(8)
目标距离R0处的线分辨率为:
(9)
因此,实孔径成像若想获得高的方位向分辨率,必须提高工作频率,或增加基阵孔径。提高工作频率将导致作用距离下降,而过大的基阵孔径也难以在工程上实现。
合成孔径的思想是利用小孔径基阵沿某一固定方向的移动合成虚拟的大孔径,相当于形成了一个窄波束,然后利用复杂的成像算法完成孔径合成处理,从而实现高分辨率成像。如图2所示,对于目标P,其与声呐距离为R0,其合成孔径长度为声呐对目标P持续照射时间所经历的路径长度,可以表示为:
(10)

图2 合成孔径原理Fig.2 Principle of synthetic aperture
考虑声波的双程传播情况,合成孔径声呐方位向分辨率可以表示为:
(11)
因此,合成孔径声呐的方位向分辨率与声呐的工作频率和作用距离无关,仅与基阵的声学孔径相关。
1.4 多子阵成像技术
SAS接收的回波为二维信号,在距离和方位两个方向都要满足相应的采样要求。为了避免距离模糊,必须保证发射下一个脉冲前完成对回波的采样,脉冲重复频率(pulse repetition frequency,PRF)用Fα表示,应该满足:
Fα≥2Rmax/c
(12)
对于方位向采样来说,脉冲重复频率Fα应该满足:
Fα≤D/(2v)
(13)
综合考虑2个约束条件,脉冲重复频率Fα应该满足一下条件:
2Rmax/c≤Fα≤D/(2v)
(14)
SAS的测绘效率定义为单位时间SAS的成像面积,等于测绘带宽Rmax与平台云运动速度v的乘积:
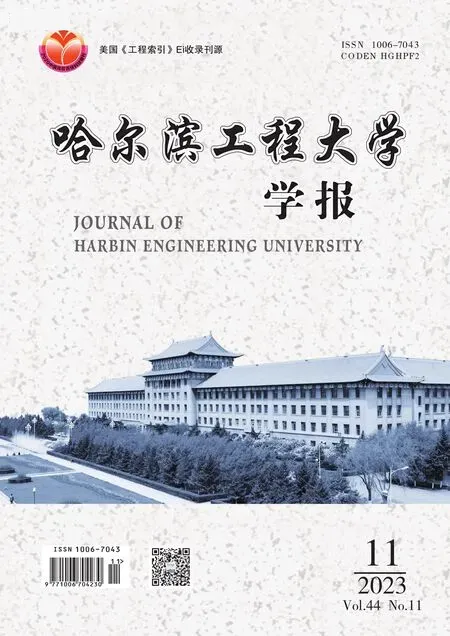
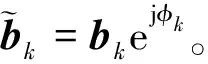
Rmaxv (15) 水中声波传播速度约为1 500 m/s,严重限制了SAS测绘效率,而多子阵技术是常见的提高测绘效率方案[16]。SAS系统一般采用单发射基阵多接收基阵的配置来提高测绘效率。如图3所示,使用N个接收子阵同时进行采样,可以将方位向采样率提高N倍,允许航速提高N倍,测绘效率提高N倍。多子阵技术可以有效的提高SAS的测绘效率,但是会带来空间采样率不均匀的问题,刘维等[17]针对空间非均匀采样进行了研究,采用不均匀分离快速傅里叶变换和不均匀快速傅里叶变换对ω-k算法进行改进,使其可以应用于多子阵合成孔径声呐的图像重建。 图3 多子阵合成孔径声呐Fig.3 Multiple receiver channels SAS 合成孔径声呐技术经过数十年发展,主要问题已变为成像精度、成像测绘效率、非直航下高分辨成像等问题。 为获取海底小目标高分辨声图,运动误差估计与补偿精度是十分重要的,合成孔径相干处理通常要求精确已知的平台轨迹,一个合成孔径内的轨迹误差超过波长的1/16~1/8就会造成成像质量的明显下降[18]。例如,对于中心频率为100 kHz的合成孔径声呐系统,其波长的1/8不高于2 mm。载体的运动、介质的不稳定、声速的变化、海底地形的剧烈变化,都会影响合成孔径声呐的成像质量。图4展示了中心频率100 kHz的合成孔径声呐对沉船的成像结果,沉船位于距离向80 m处,由于存在运动误差,原始声呐图像中仅仅可以分辨出沉船轮廓,经过运动补偿后,图像质量得到明显提高,可以观察到更多的结构细节。 图4 SAS对沉船成像结果运动补偿前后对比Fig.4 SAS imaging results of the wreck before and after motion compensation 合成孔径声呐运动误差估计和补偿方法主要包括基于原始回波数据的运动补偿方法、基于运动传感器的运动补偿方法以及基于声呐图像自聚焦的补偿方法。这3类方法各有特点,基于原始回波数据的运动补偿方法对于偏航角的估计精度较差,且要求声呐运动有相位中心的重叠,会限制载体航速,但其估计精度高;基于运动传感器的运动误差估计方法受导航设备的精度的限制;基于声呐图像的自聚焦算法通常用于消除较大运动误差补偿后的残留误差,其中以相位梯度自聚焦算法最为典型。这些技术在实际使用过程中并不严格区分,常常结合使用。运动误差指的是载体真实运动轨迹和理想运动轨迹之间的误差,以上3种方法分别利用原始回波、传感器以及声呐图像数据对误差相位进行估计,然后通过回波或者图像与误差相位因子进行相乘,将声呐回波或者声呐图像对齐到理想直线运动状态,实现对运动误差的补偿。 为了提高运动误差估计方法的稳定性和估计精度,国内外研究人员提出可采用多种信息源融合的方法进行联合运动误差估计。 2.1.1 基于回波数据的运动误差估计与补偿 在回波数据方面,研究主要集中于偏移相位中心(displaced phase center, DPC)算法及其改进算法。一方面是解决DPC算法误差估计适用于合成孔径声呐宽测绘带的问题,另一方面基于回波数据提升运动误差估计精度的问题。经过20余年发展,初步建立了基于回波的运动误差估计与补偿基本框架,提出了适用于大测绘带合成孔径声呐的运动误差估计与补偿方法,并基于多子带回波信号方法提升了运动误差估计鲁棒性,利用双侧回波实现了横荡误差与升沉误差的估计,为基于回波数据的运动误差估计与补偿的实际应用提供了技术支撑[19-26]。 假设多子阵合成孔径声呐沿方位向以vy的速度前进,如图5所示,前一帧时刻阵元的位置用虚线表示,后一帧时刻阵元的位置用实线表示。由于运动误差的影响,声呐在距离向产生了偏移,表示为ΔR。可以看出,等效相位中心[27]在前后两帧存在重叠,其中一对相位中心的波束均探测到包含有目标P的区域。假设水声信道时变性较小,声呐接收的回波是互平稳的过程。根据“波形不变”理论,该区域反射的两帧回波具有较大的相关性。 图5 DPC算法估计横荡误差Fig.5 DPC algorithm estimates the sway error 对目标P处的回波进行分析,假设声呐接收的回波信号为s(t),第k-1帧时刻第i个相位中心接收的回波表示为si,k-1(t),则: si,k-1(t)=s(t)+ωk-1(t) (16) 第k帧时刻第j个相位中心接收的回波信号为sj,k(t),则: (17) 式中ωk-1(t)、ωk(t)分别表示前后两帧信号的噪声,两者互不相关。受距离向横荡误差的影响,两帧回波之间存在时间差。假设声呐信号与噪声互不相关,回波为平稳过程,对si,k-1(t)与sj,k(t)做互相关运算,得到互相关函数为: (18) 式中Rs,s(τ)为信号s(t)的自相关函数。由此可见,互相关函数仅与横荡误差ΔR有关,通过计算互相关函数峰值与相关序列中心之间的间隔,可以估计出横荡误差ΔR。这就是DPC算法估计横荡误差的基本原理。采用基于回波数据的运动误差估计与补偿前后的小目标成像结果如图6所示,小目标为长度2 m,直径0.5 m的金属圆柱体,位于斜距50 m的位置。通过运动误差估计与补偿,小目标成像精度得到了有效改善。 图6 UUV-SAS千岛湖试验柱状目标补偿结果Fig.6 UUV-SAS Cylindrical target motion compensation results 2.1.2 融合多传感器和DPC的运动误差估计与补偿 DPC难以对偏航角误差进行高精度估计,运动传感器可以弥补这一不足。运动传感器选择惯性导航(inertial navigation system,INS)设备获取的姿态信息,目的是将DPC估计的方位向、距离向、垂向的速度与INS测量的方位向、距离向、垂向的加速度进行融合,图7给出了DPC与INS数据融合模型。首先对回波数据进行相关运算估计出声呐的方位向速度vy;然后结合INS输出的姿态角,对速度矢量分解,解算出声呐的距离向速度vx和垂向速度vz;接着将方位向、距离向、垂向三向速度连同载体坐标系下INS输出的方位向、距离向、垂向加速度ax、ay、az以及姿态角一并输入卡尔曼滤波器进行滤波;最后输出声呐速度估计值,同样包括了方位向、距离向和垂向3个方向的数据。 图7 DPC与INS数据融合模型Fig.7 DPC and INS data fusion model 通过信息融合对运动误差进行估计与补偿,运动误差补偿前后的成像结果如图8所示,可见通过两者融合能够有效的提升成像质量。 图8 基于多传感器与DPC运动误差补偿前后的成像结果Fig.8 Imaging results before and after motion error compensation based on multi-sensor and DPC 2.1.3 合成孔径声呐自聚焦算法 自聚焦是一类根据回波数据或图像数据对多源相位误差进行估计和补偿的方法。基于运动传感器的运动补偿方法受限于传感器的精度往往存在残余运动误差,可通过自聚焦技术进一步补偿。从运动误差建模的角度来看,自聚焦技术通常可分为2类:参数化方法和非参数化方法。参数化方法预先建立运动误差的参数化模型,利用求解算法估计模型的参数,进而估计运动误差。非参数化方法无需假设运动误差的模型,直接从原始回波或图像中提取运动误差对应的相位误差或相位误差的梯度。已经开发了多种经典的自聚焦算法,如Map-drift算法[28]和相位梯度自聚焦算法(phase-gradient autofocus, PGA)[29]等。大多数自聚焦算法基于聚束模式成像,在应用于条带式SAS时需要进行改进,这限制了其应用。在条带式SAS中较为常用的是PGA算法及其改进算法。大多数自聚焦算法的另外一个限制是对线性平台运动的要求。复杂的水下环境使得SAS载体往往按照非线性轨迹运行,给经典的自聚焦算法带来了挑战。 随着处理平台算力的提升,时域成像算法逐渐受到关注。由于时域成像算法可适用于任意成像模式和任意轨迹的精确成像,因此基于时域成像算法的自聚焦方法可突破经典自聚焦算法的限制。基于反投影(back-projection, BP)成像算法的自聚焦方法的基本框架介绍如下。 (19) (20) 常用的图像质量度量指标包括图像熵、对比度和锐度等。图9给出了应用反投影自聚焦算法前后的SAS图像,声呐工作频率100 kHz,带宽20 kHz,对水下地貌的成像结果。 图9 反投影自聚焦算法补偿前后的成像结果Fig.9 Imaging results before and after compensation by the back projection autofocus algorithm 测绘效率问题是合成孔径声呐的经典问题,由于方位向的孔径合成处理,空间采样率受到奈奎斯特采样定理约束,严重制约了合成孔径声呐测绘效率的提升。针对这一经典问题,1.4节中的多子阵合成孔径声呐技术被提出,解决了合成孔径声呐的实用问题。如何进一步提升合成孔径声呐的测绘效率,已成为快速、高效探测海底小目标任务的迫切需求。比如当载体平台的航速在10 kn以上,搜探距离达到400 m,为满足方位向不出现欠采样,接收阵长将达到5 m,显然这样的设备的适装性很差,难以实现。 为了进一步提升合成孔径声呐的测绘效率,一方面可考虑采用多阵、多脉冲的方式实现效率的提升,增加方位向采样速率避免空间欠采样的出现;另一方面可以在方位向出现欠采样情况下,通过方位向模糊抑制技术实现图像重建,获取清晰成像结果。本节介绍采用多发多收(multiple-input multiple-output, MIMO)体制的合成孔径声呐研究成果,与常规合成孔径声呐相比,MIMO-SAS同时发射多个正交波形,利用多通道观测数据消除方位向模糊,从而实现远距离高效率探测,缺点是会带来硬件以及信号处理算法复杂度的提升。具体的研究问题框架如图10所示。 图10 多发多收合成孔径声呐基本问题Fig.10 MIMO-SAS basic problem 多发多收的成像体制主要包括离散频率编码技术、方位向波形编码技术等,这一技术体制在雷达领域已经有了实际应用。在合成孔径声呐中,该技术尚处于起步阶段,需要解决诸多关键技术,其中最为重要的是发射的正交编码序列作用到海底或水下目标后的回波信号的正交性保持。 声呐与雷达不同之处在于声呐信号受随机性扰动的影响很大,回波信号由于受到水体及散射目标的信号调制,往往会产生较大的畸变,会导致回波信号正交性的丧失。因此,需要从理论和试验上对离散频率编码的高分辨率成像新体制进行研究。 针对多发多收合成孔径成像新体制,通过对正交信号分离技术,获得多通道数据,联合多通道处理技术,实现高效高分辨声成像处理,具体以频分MIMO-SAS为例对技术途径及实现方法进行描述。发射阵T1、T2分别发射相互正交的波形S1、S2,二者占用不同的频谱范围。目标经过发射声波的照射,接收机R1,R2,…,RN会接收到2种发射信号的回波。回波信号分别通过不同的带通滤波器,分离出来自不同发射机的发射信号。经过匹配滤波正交解调后,在方位向进行重排,分别对应到等效单发射SAS的采样位置。将回波信号分离后,在方位向排列,分别进行相位误差补偿和相干叠加,即可模拟等效单发射波束系统的回波相位历程,之后便可以采用常规成像算法对目标进行成像处理。频分MIMO-SAS成像示意图如图11所示。 图11 频分MIMO-SAS成像示意Fig.11 Frequency division MIMO-SAS imaging diagram 实际使用时,频分MIMO-SAS通常配置成接收阵为等间隔分布的线阵,发射阵分为2组分别放置在接收阵的前后两端。工作时,每个发射阵发射的信号不同,头一帧发射信号与下一帧发射信号的组成顺序按照基阵的移动,每帧交替变化。合成成像算法流程如图12所示。 图12 频域合成成像算法处理流程Fig.12 Frequency domain synthetic imaging algorithm processing diagram 图13为双发射合成孔径声呐的湖上试验结果,声呐距底高度约55 m,测绘宽度为250 m,基阵长度1.5 m,2个高频发射基阵发射信号带宽相同为15 kHz,中心频率分别为90 kHz和110 kHz,2个低频发射基阵发射信号带宽相同为4 kHz,中心频率分别为9 kHz和15 kHz。实验过程中航速6 kn,对于同样基阵长度的单发射合成孔径声呐其最大航速为5 kn。人工小目标和地貌的成像结果清晰,表明双发多收体制技术可实现海底小目标的远距离高效率探测。 在浅水环境下,载体平台运动轨迹受水面海浪影响严重,难以保持直线航行。2.1节介绍的运动误差估计与补偿技术仅仅适用于载平台运动轨迹为近似直航或者分段直航的情况,其本质上是直线航迹的成像算法。在载体平台非直航的情况下,会由于成像模型失配导致无法聚焦,而且对于偏航角误差无法进行有效补偿。因此,面向非直航情况下的海底小目标高分辨成像问题也备受关注,除了传统的正侧视合成孔径声呐,还发展出如圆迹合成孔径声呐、多角度合成孔径声呐、斜视合成孔径声呐以及层析声呐等[30-34]。 传统的合成孔径技术要求载体做匀速直线运动,以保证孔径合成的有效性。SAS成像算法可以分为频域成像算法和时域成像算法。时域成像算法如后向投影(back-projection,BP)算法是一种精确的成像算法,可以实现任意轨迹的完美聚焦,但是巨大的计算量限制了其应用。很多学者对时域算法的快速计算进行了研究,快速后向投影(fast back-projection,FBP)算法[35]和快速分解后向投影(fast factorized back projection,FFBP)算法[36]成功的将时域算法的计算量降低至可以和频域算法相比的量级。但是,快速后向投影和快速分解后向投影成像算法由于需要进行插值通常意味着近似和成像质量的降低。文献[37]讨论了成像质量和计算量之间的权衡,同时FBP与FFBP算法中的运动补偿算法研究较少。 结合FBP成像算法的思路,提出非直航情况下的快速成像算法。首先基于多子阵合成孔径技术进行单帧的极坐标成像,其单帧极坐标成像结果是精确的不受运动误差影响的,再将不同帧得到的极坐标图像进行相干叠加,便可实现高分辨成像。具体方法为:首先将单帧的多通道回波数据进行波束形成得到极坐标子孔径图像;再依据载体空间位置以及发射波束朝向,将子孔径极坐标图像插值到地平面笛卡尔成像网格;通过子孔径图像的相干叠加,最终实现高分辨率成像。图14给出了非直航下的高分辨成像处理示意图。阴影部分为发射波束照射的海底区域,建立以发射阵为原点的极坐标系。利用极坐标下的距离关系,可以快速的实现单帧声呐图像的极坐标聚焦,用Ik(r,θ)表示第k帧的子孔径极坐标图像,由于实孔径成像具有方位向角度分辨率低的特点,极坐标成像的计算量远小于笛卡尔坐标系成像的计算量。接着使用插值方法将极坐标图像Ik(r,θ)插值到笛卡尔成像网格中得到Ik(xp,yp)。 I(xp,yp)=∏[I1(xp,yp),…,Ik(xp,yp),…, IK(xp,yp)] (21) 最后在笛卡尔成像网格中将不同帧的声呐图像进行相干叠加,随着孔径增大,声呐图像的分辨率也逐渐增加,最终得到全孔径的高分辨率声呐图像I(xp,yp)。 通过子孔径处理,能够实现复杂运动条件下的稳定高分辨成像。图15为典型非直航情况的运动轨迹,声呐工作中心频率为100 kHz,带宽20 kHz,设备拥有16个接收通道,脉冲重复时间为0.3 s,声呐运动轨迹采用多普勒计程仪以及角度传感器积分得到。图16给出了传统频域处理方法和子孔径处理方法的成像结果对比。 图15 声呐运行轨迹Fig.15 Sonar trajectory 图16 ω-k算法与快速后向投影成像算法结果Fig.16 ω-k and FBP imaging results 通过对比非直线航迹下的合成孔径声呐原始瀑布图和快速后向投影成像算法结果,可以看出转弯处,原始瀑布图由于模型失配,导致图像无法聚焦。而快速后向投影成像算法依旧可以实现图像的聚焦,可以清晰的对地貌和目标进行恢复。 海底小目标高分辨成像技术是解决水下固定目标搜探的最重要的技术手段。常规合成孔径声呐相关技术已趋于成熟,系列化的合成孔径声呐产品已进入军民市场,为海底小目标高分辨成像提供了有力保障。随着技术的深入与应用的推广,对海底小目标高分辨成像能力也提出了更高的要求,主要发展趋势包括: 向更高分辨、更稳定高清晰图像获取方向发展。为了满足海底多种形态小目标探测的需求,成像分辨率、成像清晰度是实现高准确率目标识别的前提,需要解决误差估计精度与快速补偿技术,满足成像能力的需求。 向更高测绘效率发展。合成孔径技术的出现,对于海底小目标的搜探效能有了显著提升,由于其恒定的方位向成像分辨率,对海底小目标有效作用距离得到了极大提升,但随着高航速等任务场景的出现,满足更高测绘效率的高分辨成像技术也成为了备受关注的发展方向。 向着多角度多维度立体观测发展。条带式合成孔径声呐可以获得环境和目标在斜距平面内的后向散射强度投影,相同距离不同高度的散射点在声呐图像中重叠在一起,丢失了高度信息。如果可以获取目标与环境的多角度和多维度信息,对于提高目标的识别准确率有非常大的帮助,需要对下视三维合成孔径声呐与干涉合成孔径声呐以及圆迹合成孔径声呐等新体制合成孔径声呐进行研究。 向多平台、多任务场景的海底小目标高分辨成像技术发展。随着水下平台技术成熟度的提升,多种类型水下平台的任务样式也趋于多样化,为满足多样化任务的海底小目标高分辨成像需求,需要解决多种复杂场景下、运动轨迹多样化下的高分辨成像问题。 海底小目标高分辨成像技术是进行海底目标探查、失事目标搜救、海底工程检查以及水下考古等任务的有效手段。本文结合现阶段合成孔径声呐研究现状与发展趋势,给出了海底小目标探查技术的几点重要的研究进展,介绍了高精度运动误差估计与补偿技术实现高分辨成像、高测绘效率高分辨成像以及适用于任意轨迹下的高分辨成像等方面的研究成果,在此基础上展望了未来海底小目标高分辨成像技术的发展方向。
2 海底小目标技术发展现状
2.1 运动误差估计与补偿技术




2.2 高测绘效率成像技术



2.3 非稳定直航下的高分辨成像技术


3 展望
4 结束语
猜你喜欢
中学生数理化·八年级物理人教版(2022年9期)2022-10-24 07:03:52
幼儿园(2021年12期)2021-11-06 05:10:20
潍坊学院学报(2021年2期)2021-07-22 07:59:24
海洋信息技术与应用(2020年3期)2020-08-24 07:25:10
小学科学(学生版)(2019年10期)2019-11-16 08:55:14
电脑知识与技术(2019年13期)2019-07-08 02:23:41
中国修辞(2016年0期)2016-03-20 05:54:32
幼儿100(2016年28期)2016-02-28 21:26:17
火控雷达技术(2016年2期)2016-02-06 02:29:00
浙江大学学报(工学版)(2015年1期)2015-03-01 01:17:23