一种水声组网定位一体化系统设计与实现
2024-01-08 09:01马伯乐卫红凯郑思远古海玲
数字海洋与水下攻防 2023年6期
马伯乐,卫红凯,郑思远,古海玲,童 峰
(1. 中国人民解放军 92150 部队,浙江 舟山 316000;2. 海军工程大学 电子工程学院,湖北 武汉 430033;3. 厦门大学 海洋与地球学院,福建 厦门 361002)
0 引言
由多个水下声学互通互联水声节点组成的水声网络可大大提高水下信息传输能力,得到了国内外相关研究单位的高度重视,并在多个涉海应用领域推进理论研究、技术实现及工程应用[1-2]。
对水声网络而言,获取网络节点位置可在多样化应用领域中扮演着十分重要的角色,例如在海洋测量、环境监测任务中,控制中心往往需要同时获得环境数据与测量、监测节点的位置信息。并且,它也是基于地理信息路由的基础,如基于矢量的转发(Vector-Based Forwarding,VBF)协议[3]就需要获取节点的位置信息,构建虚拟管道来进行网络数据包的转发;如基于扇形的目的预测路由(Sectorbased Routing with Destination Location Prediction,SBR-DLP)协议[4],需要获取源节点和目的节点位置信息,并依据运动模型划分扇形区域选择中继节点;以及定向泛洪路由(Directional Flooding- Based Routing,DFR)[5]、聚焦束路由(Focused Beam Routing protocol,FBR)[6]等协议和在这些协议基础上优化改进的一系列路由协议都需要依靠节点的位置信息来生成路由,支撑网络的运行。对于认知水声网络,节点位置、距离信息也是一项重要的认知信息,例如通过节点的距离信息可以优化节点的发射功率、调制模式、路由选择、拓扑结构等,提高网络的性能。
但是水声网络在布置时,节点往往没有任何关于位置的先验信息。虽然为网络节点配置GPS、北斗这类全球定位系统是最简单的解决方案,但是全球定位系统使用的射频信号在水下衰减很快,定位信息无法直接传递给水下节点。通常情况下,水下节点仍然需要使用水声定位方法确定自身位置。
水声定位是海洋开发、水下施工、科考、水下救援、水下无人平台等领域关键技术。利用参考点、定位点之间水声传播从水声接收信号获取信号强度、传播时间、波达方向等信息,并利用位置关系解算目标位置的水声定位技术得到了广泛的研究和应用[7]。典型的如基于测距的水声定位技术,多家国内外厂商推出了不同用途、不同参数的基于测距的水声定位设备[8-10]。
但是,传统的基于测距定位需要逐个节点进行数次应答测距,同时往往需要精确的时间同步,不仅仅需要较长的定位时间,而且对于多网络节点定位需要多次进行基于测距定位操作,效率低下。
基于到达时间差(Time Difference of Arrival,TDOA)的TDOA 定位方法利用目标声源信号到达不同水听器的时间差进行位置解算[11],无需应答,因而对网络而言,其定位过程中并不支持节点间水声数据交互。
考虑到水声网络中多个节点互联互通实际上具备了利用接收信号解算节点位置的条件,直接利用网络组网过程中不同网络节点间应答即可获得网络节点间距,从而可在网络通信的同时,在不付出额外开销、无需精确时间同步的前提下进行基于网络通信的节点定位[12]。
本文设计并实现了一种水声组网定位一体化(Underwater Acoustic Integrated Networking-Positioning,UAINP)系统,并对测距定位过程中的误差进行了分析和修正。最后,通过湖上试验对所设计的水声组网定位一体化方案进行了初步验证,实验结果表明了所提方案的有效性。
1 技术方案及系统设计
1.1 水声组网通信应答测距
根据上述分析,在水声网络组网–定位过程中,本文采用无需精准时间同步的应式测距方式,利用网络传输中的节点间交互进行网络节点应答测距,随后在测距基础完成节点定位。
在一对水声收发装置上实现水声通信与测距一体化功能有3 种实现方式:第1 种是以时分工作方式,在不同的时隙上分别发射水声通信调制信号和水声导航测距调制信号,在接收端分别对水声通信信号和水声导航测距信号进行接收处理,这样以时分方式分别进行水声通信和水声测距;第2 种是频分工作方式,即发射端的水声通信和水声测距定位信号采用不同的工作频率,这样在接收端通过频率滤波,可以同时处理和解调水声通信和水声测距信息;第3 种是将水声通信和水声应答测距信号通过共用同步头的方式一体化实现,在发射端发射经过特殊设计的水声信号,在接收端通过同步解调等信息处理,通过接收一组在同一频率上的水声信号,既完成水声测距,也可以解调得到水声网络通信数据。
但是由于方法 1 无法实现同时进行通信和测距导航,时效性受影响;方法2 需要占用较多的水声信号带宽;而方法3 在通信的同时,实现了测距定位,只需要选择恰当的同步头格式,不需要增加额外频率,因此本文系统采用第3 种方式实现水声测距与通信的一体化。系统使用的水声信号格式如图1 所示。

图1 信号帧格式Fig. 1 Structure of packet
基于水声网络通信的需求[2]和线性调频信号自相关性强的特点,采用线性调频信号作为同步信号,测距过程以同步信号为基准确定往返时间。
水声组网多址接入控制(Media Access Control,MAC)层采用基于握手协议,其握手的过程就是2个握手节点的应答过程,可以在这个过程中进行应答测距而不会增加额外开销。往返时间如下式所示
式中:t表示AB 节点间水声传输时间;T表示节点A 记录的测距时长,由于节点A 需要将CTS 解调完之后才能获得往返时间,因此T中包含着RTS和CTS 的发送时间,分别用tRTS和tCTS表示;te表示系统延迟,可以事先测算出; Δt为随机时间误差,一般大于0。最终获得的测量结果是的值。
1.2 基于测距的水声定位
水声组网定位一体化系统根据网络通信应答测距结果来进行定位,定位方法采用了三边测量法,即未知节点通过测量与已知坐标的锚节点之间的距离来确定节点位置[13]。
如图2 所示,A、B、C 3 个作为锚节点的网络节点坐标为(xa,ya),(xb,yb),(xc,yc),它们到待测节点D 的距离分别为da,db,dc
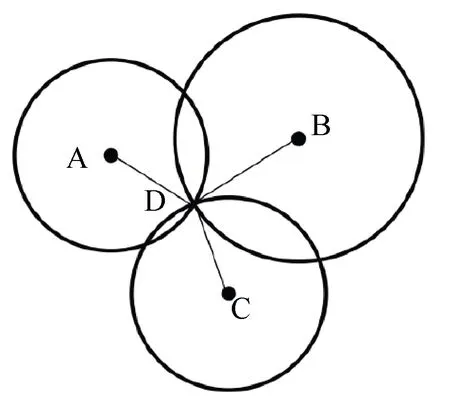
图2 三边定位原理Fig. 2 Illustration of trilateration positioning
根据上式,可以得到未知节点坐标:
1.3 声速误差补偿
基于水声组网通信的应答测距结果是根据水下声速和传播时间计算获得,因此水下声速的测量值与实际值差别将在测距结果中引入误差。
海水中的声速测量主要有2 种方法:利用声速剖面仪等外部仪器设备直接测量海水中的声速值,即直接测量法;另一种为根据经验声速模型来进行计算,即间接测量法。间接测量法利用海水的温度、盐度、压强计算海水某一区域的声速,将一定深度范围的声速视为一个固定值,实际海水的温、盐、压处处不相同,海水介质的分布不均匀,导致不同深度的声速值大小亦不同,一般对声速误差的修正采用平均声速法[13]。
当2 个通信节点距离较近且深度相近时,声线传播路径弯曲较小,即使用固定的声速值计算节点之间的距离也有较好的定位精度。节点间距离较大且深度相差较远时,声速变化较大,声线弯曲程度也会变得越大。对声线弯曲程度对定位精度造成的影响,当曲线曲率半径越小时,造成的误差值越大。为了提高定位精度,可采用声线修正的方法[14]。
由于声速、声线的校正方法作为水声定位技术的关键环节已得到广泛研究,而本文侧重从水声组网–定位一体化角度开展基于水声组网通信的定位研究,因此直接采用实测声速剖面中对应深度的声速进行简单声速校正,未进行声线校正。
1.4 应答测距误差补偿
对本文组网–定位一体化系统而言,考虑到基于组网通信的应答测距过程中,物理层水声通信为了保证实时性采用双缓存切换处理,即一个缓存采集数据,另一缓存处理数据,并进行循环切换。这就导致了在应答过程中,接收节点接收到的请求信号的实际结束时间与数据处理完成并触发应答的实际时间不一致,由此产生的时间误差将直接影响测距误差,如图3 所示。

图3 应答测距误差校正示意图Fig. 3 Illustration of response-ranging error correction
为了消除这种由于通信应答过程导致的测距误差,本文方案在应答信号中进行校正处理,具体校正过程为:1)发射节点发送请求信号;2)接收节点接收到请求信号,并计算出接收到的请求信号实际结束时刻与双缓冲工作模式下数据处理完成、判定该信号结束时刻之间的时间差;3)在应答信号中将此时间差作为校正信息,回送至发送节点进行反馈;4)发送节点收到应答信号后,获得校正信息,即可在应答测距处理中消除由此导致的误差。
同时,本文水声组网–定位一体化系统基于组网通信应答测距需要精确的应答时间计算,而从水声组网角度水声网络节点进行网络数据处理可能会占用时间导致延迟估计错误,因此系统在进行测距时对网络程序进行了时序控制,避免在测距进程中插入大量的网络数据处理程序。
2 湖试实验
本文基于AMLink 水声通信节点[15]构建了一个小规模水声组网定位一体化试验系统,该通信节点通信物理层主要参数如表1 所示。物理层水声通信采样率为75 kHz,信号中心频率为15.5 kHz,带宽2.3 kHz,采用直接序列扩频(Direct Sequence Spread Spectrum,DSSS)调制。信号帧结构由同步信号、保护间隔、信息段信息序列部分3 个部分组成。

表1 水声网络物理层相关参数Table 1 Parameters of acoustic communication system
为了验证本文水声组网定位一体化试验系统的性能,在某水库进行了小规模组网定位一体化实验。试验水域网络节点设置及实测水域声速梯度分别如图4(a)、4(b)所示。试验水声组网定位一体化系统的网络多址采用MACA 多址方案[2],通过RTS-CTS-DATA 握手交互实现网络节点之间的互联互通,网络路由采用固定路由方式。

图4 试验水域地图及声速剖面Fig. 4 Map of trial area and sound velocity profile
试验水声网络拓扑结构如图5 所示,其中节点D 搭载于小艇上为待定位节点,节点A、B、C 为定位基准点,其位置信息已知。在组网–定位一体化试验中,全过程进行各节点组网通信,并以一体化方式同时进行组网通讯应答测距。节点D 轮流与基准点进行通信,基准点在回复节点D 的时候,携带基准点之间的距离信息。这样,在完成与所有基准点通信之后,节点D 可以获得DA、DB、DC 之间距离以及基准点的位置信息,即可基于通信组网过程利用三边定位法解算自身节点位置。

图5 网络拓扑Fig. 5 Topology of experimental network
基准点A、B、C 放置于趸船上,所有节点入水深度约为3 m。利用卷尺直接测出网络节点入水位置之间距离,作为标准值,与网络测距结果进行对比。网络节点距离标准值如表2 所示。

表2 网络节点间距Table 2 Distances between network nodes
3 实验结果与分析
组网–定位一体化实验中,网络运行结果如表3 所示,从水声网络整体发送接收情况来看,由于小规模试验网络的范围小,网络运行正常,在网络运行过程中累计传输230 个数据包,无丢包情况发生,物理层水声通信误码率为0。

表3 水声网络运行情况Table 3 Behavior of underwater acoustic network
水声组网通信应答测距误差如图6 所示,从图6 中可以看出,测距结果较为稳定,测距误差均小于5%。
实验中网络定位情况如图8 所示,网络运行过程中的定位误差如图7 所示。从图7 可以看出,随着网络的运行,基于组网–定位一体化的网络节点定位误差逐渐稳定在0.6 m。初步湖试试验结果表明,本文小规模水声组网定位一体化试验系统具备无需精确时间同步下的组网、定位功能。

图7 实验过程定位情况Fig. 7 Positioning behavior during experiment

图8 实验过程定位误差Fig. 8 Positioning error during experiment
4 结束语
本文介绍了一种水声网络中组网定位一体化方案。首先给出了水声组网定位一体化技术方案中通信组网应答测距、定位、设计及误差补偿方法设计,并基于技术方案构建了小规模水声组网定位一体化实验系统,最后通过湖试实验初步验证了所提水声网络中组网定位一体化方案的有效性。湖试实验实验表明,相对于TDOA 等常规分布式定位系统,本文所提方案具备了在进行网络通信的条件下实现一定精度网络节点定位的功能。
也需指出,本文湖试实验侧重验证组网定位一体化基本功能的实现,系统规模、网络范围小,获取的结果比较初步。特别是,由于网络多节点测试距离较近,声线弯曲现象不明显,在此种情况下获得的测量误差无法直接应用于中等距离或远距离下的定位误差评估。
考虑到本文采用的AMLink 扩频水声通信节点在6 km 范围内应答测距相对误差为3%[16],在相对测距误差量级上与本文试验大致相当,为中等距离或远距离条件下定位性能评估提供了参考。下一步计划进一步以更大范围、更多节点、不同水域海域开展所提技术方案实验验证[17-18],同时评估水文环境因素对系统工作的影响,并完善声速、声线校正措施对定位性能的影响,减小典型不确定因素对系统性能评估本身引入的影响。
猜你喜欢
科学(2020年3期)2020-01-06
电子制作(2017年7期)2017-06-05
电子制作(2017年22期)2017-02-02
电子制作(2017年19期)2017-02-02
中学生数理化·八年级物理人教版(2016年7期)2016-12-24
系统工程与电子技术(2016年7期)2016-08-21
航空学报(2015年4期)2015-05-07
航空学报(2015年4期)2015-05-07
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
太空探索(2014年1期)2014-07-10