收割机智能自动控制及液压两驱- 四驱切换装置的研究
2024-01-04 11:53崔宗霞
机械管理开发 2023年11期
崔宗霞
(山东省济南市长清区双泉镇人民政府, 山东 济南 250303)
1 项目概况
当前,GPS 卫星定位和自动导航驾驶技术在农业收割机中得到了广泛应用,有效提高了收割机工作效率、作业质量、土地利用率,节本增效效果显著。同时自动转向技术在农业收割机也得到了应用,具有以下优势:在能见度低时能够获得高可靠性及安全性;使割台宽度能够得到最大利用;可以很精确地描绘每片区域的产量,以便精准作业;降低了油耗;减少转弯时间;降低了驾驶员的压力使其能更加关注于收割作业上[1-2]。
为进一步实现农业收割机的无人驾驶智能化控制,设计了农业收割机自动控制新技术。国内农业收割机液压行驶系统主要采用两轮驱动形式或四轮驱动形式,两者无法进行自动切换,不太符合当前收割机的行驶和作业工况,无法将两驱和四驱的优势发挥出来,基于收割机节能性角度,设计了一种两驱- 四驱液压切换装置,能够解决传统收割机两驱、四驱不能切换的问题。
2 基于智能化自动控制新技术的设计
2.1 割台高度控制方式
利用传感器改装收割机割台液压升降装置,使安装在收割机割台上的传感器能够准确测得割台与行驶路面之间的距离,利用PLD 工作原理,编辑逻辑程序,对探测到的数据进行收集、分析、处理并发出指令给收割机割台液压升降系统,实现割台自动升降。当前收割机割台高度控制方式主要有以下三种模式:
模式一:恢复到预先设定的割台高度以收割切割后断杆较长的作物。如玉米、青储饲料等农作物,收割后的断杆较长,收割机进行收割作业时,需要将割台控制在一个较高的高度,而且不同的农作物需要的割台高度也不相同,因此预先设定在割台控制系统中。
模式二:保持切割后断杆在一个预先设定的长度,比如使用和地面接触的机械传感器。对于地面不是平面的田地,需要收割机的割台高度能够随着地面的起伏进行实时的高度控制。此时,需要在割台上安装机械传感器,检测地面到割台的高度。
模式三:保持割台一个预先设定的对地压力以收割倒伏的作物。由于大风、大雨等原因,农田实际存在农作物倒伏的情况。为了收割倒伏的农作物,需要割台紧贴地面作业,此时,割台与地面之间不是高度控制,而是贴合压力控制[3]。
2.2 山地地形自适应控制
在倾斜和起伏的山地地形上面,割台可以根据地形情况倾斜和升降,以适应变化的复杂地况作业,同时整机的悬挂系统可以保持整机平衡状态,以提高驾驶员的驾驶舒适性和脱粒及清选系统的作业效率,如图1 所示。

图1 山地地形自适应控制示意图
2.3 行驶作业速度自适应控制
采用静液压驱动拨禾轮,喂入速度可实现自动调整,根据收割机行走速度自动调节割台及喂入的速度,如田间作物密度变稀,收割机将加速,这时割台和喂入的速度将会自动调整,以匹配行走速度,如图2 所示。
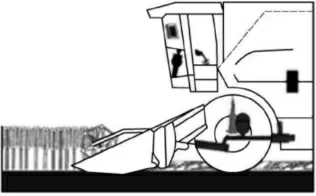
图2 行驶作业速度自适应控制
2.4 清选系统自动找平功能
在斜坡上收割时,减少谷物的损失及增加生产效率,和在平地上收割效果一样。整个清选系统(包括谷物盘、上筛、下筛、风机)能够自动调整水平以获得最佳的清选效果,不管是在平地,还是在换行转弯时(换行经过田便时),以及在斜坡上收割时,都能获得最佳效果。
3 收割机液压两驱-四驱切换系统的设计
3.1 收割机液压行驶系统两驱方案
收割机液压行驶系统两驱方案工作原理和特点如下:收割机两驱液压系统包括1 个液压泵和1 个液压马达,其中,液压泵与发动机连接,液压马达与前轮驱动桥连接,发动机输出的动力经过液压泵、液压马达、前桥到达2 个前轮,2 个前轮驱动收割机行走。后轮是转向轮,没有驱动功能。
前轮驱动系统的优点为结构简单、成本低、操纵方便。前轮驱动系统的缺点为驱动力不足,特别是在爬坡、通过泥宁路段、地面附着力较小时,收割机的通过性显著降低,影响作业速度和效率。
3.2 收割机液压行驶系统四驱方案
收割机液压行驶系统四驱方案工作原理和特点如下:针对收割机两驱液压系统的不足,有厂家开发了四驱液压系统,四驱液压系统包括1 个液压泵和3个液压马达。液压泵与发动机连接,1 个液压马达与前轮驱动桥连接,另外2 个液压马达分别与2 个后轮连接。发动机的动力经过液压泵、3 个液压马达分别传输到2 个前轮和2 个后轮,实现了四轮驱动[4-5]。
四轮驱动液压系统的优点是驱动力充足,在爬坡、泥宁路段等工况下,车辆的通过性仍然很强。四轮驱动系统的缺点是能量消耗大。无论路面时好时坏,车辆都采用四轮驱动,能量消耗大,经济性差。
收割机在工作时,分为作业工况和行驶工况。在收割机行驶时,一般路面条件较好,行驶速度较高,此时,适合采用两驱液压系统来驱动,达到节能的目标;在收割机进行收割作业时,如果地面条件较好,可以采用两驱系统,如果地面出现上坡、泥宁等情况,则需要四轮驱动系统。
收割机工况特点对行驶系统的要求:两驱系统适合收割机的行驶工况,四驱系统适合收割机的作业工况,因此,理想的收割机驱动系统要能够在两驱和四驱之间进行切换。当收割机处于行驶工况时,行驶系统切换到两驱模式,以实现较高的行驶速度和节能效果;当收割机处于作业工况时,行驶系统切换到四驱模式,以实现较高的牵引力和通过性能。
根据以上对收割机工况系统的分析,最理想的收割机液压行驶驱动系统是两驱、四驱可切换的系统,根据工况的需要进行切换,达到节能的目标。针对收割机工况特点对其行驶系统的要求,提出了一种两驱-四驱液压切换装置,能够解决传统收割机两驱、四驱不能切换的问题。
3.3 一种两驱- 四驱液压切换装置
针对上述问题,设计了收割机液压行驶系统一种两驱- 四驱液压切换装置,切换原理如图3 所示。
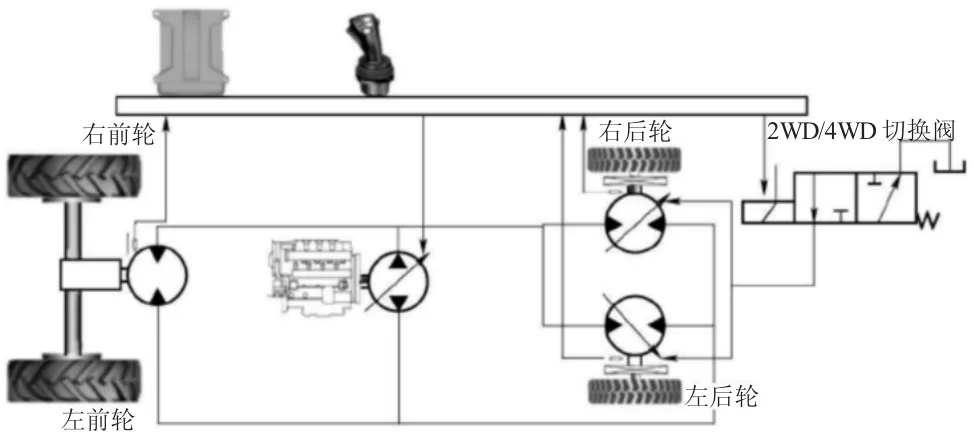
图3 收割机液压行驶系统两驱- 四驱液压切换原理图
本方案的工作原理和特点如下:本系统的四驱液压系统包括1 个液压泵、3 个液压马达、1 个切换阀、CAN 总线、控制器和控制手柄。液压泵与发动机连接,1 个液压马达与前轮驱动桥连接,另外2 个液压马达分别与2 个后轮连接。发动机的动力经过液压泵、3 个液压马达分别传输到2 个前轮和2 个后轮,实现了四轮驱动。CAN 总线与液压泵控制模块、马达转速传感器、控制器、控制手柄、液压切换阀电磁铁连接。液压切换阀与2 个后轮驱动液压马达连接。
系统工作时,控制器采集马达转速传感器的信号和控制手柄的信号,并对液压泵排量、液压切换阀进行控制。常态下,液压系统工作在两驱状态,即2 个后轮驱动液压马达排量处在零位,不工作。只有前轮驱动液压马达工作。当控制器通过马达转速传感器检测到车速较低时,通过控制切换阀电磁铁控制切换阀工作,把2 个后驱动液压马达激活(把马达排量从零位推到工作位),从而实现了从两驱模式切换到四驱模式。反之,当控制器检测到液压马达的转速回复到正常范围时,通过控制切换阀电磁铁控制切换阀回复原位,2 个后轮驱动液压马达的排量回到零位,车辆又回复到两驱模式。
两驱- 四驱切换的液压驱动系统,更符合收割机的行驶和作业工况的要求,可以兼具传统车辆液压系统两驱和四驱的优点,节能性更好。
4 结语
以农业收割机为研究对象,对其无人驾驶智能自动控制技术及行驶的节能性进行改造设计。对农业收割机无人驾驶智能自动控制技术从割台高度控制方式、山地地形自适应控制、行驶作业速度自适应控制、清选系统自动找平功能四方面进行设计,为农业收割机的智能化设计提供参考。基于收割机节能性角度,设计了一种两驱- 四驱液压切换装置,能够解决传统收割机两驱、四驱不能切换的问题,更符合收割机的行驶和作业工况的要求,为农业收割机的节能降耗设计提供参考。
猜你喜欢
汽车维护与修理(2022年5期)2022-09-06
现代制造技术与装备(2021年9期)2021-04-03
中国石油石化(2021年8期)2021-03-30
小学生学习指导·爆笑校园(2019年6期)2019-09-10
今日农业(2019年11期)2019-08-15
通信电源技术(2018年5期)2018-08-23
创新作文(3-4年级)(2016年5期)2017-05-16
新农业(2016年19期)2016-08-16
红蜻蜓·低年级(2015年11期)2016-02-02
汽车文摘(2015年3期)2015-12-11