星载观星相机系统设计及其硬件实现
2024-01-03 07:31:12徐冬冬付天骄杜丽敏朱俊青
红外技术 2023年12期
徐冬冬,付天骄,杜丽敏,朱俊青
星载观星相机系统设计及其硬件实现
徐冬冬1,付天骄2,杜丽敏1,朱俊青2
(1. 长春大学 电子信息工程学院,吉林 长春 130022;2. 中国科学院 长春光学精密机械与物理研究所,吉林 长春 130033)
为提升卫星定姿精度,采用NOIP1SN025KA型CMOS探测器设计了一款完整的观星相机。在辐照环境温度24℃、测试环境温度24℃、测试环境湿度37% RH的环境条件下利用60Co-γ辐射源进行了抗辐照实验。然后,设计了焦距为500mm、F数为4、视场角为2.4°的光学系统。电子学系统以FPGA作为核心控制器件,控制CMOS输出数字信号,并通过TLK2711将信号传回卫星数传系统。机械结构部分主要由主镜组件、次镜组件、校正镜组件、遮光罩、支腿等部分组成。采用计量筒(殷钢)支撑次镜的设计方案,保证主次镜间隔变化在温度变化工况下满足公差要求。反射镜组件设计有径向和轴向柔性,保证光学表面在力热环境下的面形精度。校正镜组件采用压圈切向压紧镜片的安装方式,对镜片的应力小,对中性好,耐冲击和振动,能够保持良好的结构稳定性。整机通过主镜背板与卫星连接。星载观星相机具备成像和传输星点的阈值和坐标信息两种工作模式。通过外场成像实验可知,该相机成像质量良好、移植性强、可靠性高。视场角范围内,可以拍摄到约10颗星,同时可以观测到9等星,可有效辅助星敏感器工作。
定姿精度;光学系统;FPGA;阈值
0 引言
星敏感器是一种姿态测量仪器,它以恒星作为姿态测量的参考源,可输出恒星在星敏感器坐标下的矢量方向,为航天器的姿态控制和天文导航提供高精度测量数据。具有高精度、高稳定性、自主性好等优点,广泛应用于导弹、战机、航空航天等领域。
目前空间光学卫星主要依靠卫星上的星敏感器进行定位,通常情况下,星敏感器为了快速进行在星表中的指向定位,其光学系统在设计时一般都是焦距较小,视场较大,这决定了其像元角分辨率较低。无论采用何种星图匹配的方法,其最终姿态定位误差都不会优于十分之一像元角分辨率[1-5]。随着近年来空间光学相机的分辨率大幅提升,对平台姿态控制精度提出了更高的要求,传统的星敏感器已经无法进一步提升定姿精度,故需要焦距更大、角分辨率更高的星载观星相机来配合星敏感器,由星敏感器完成粗定位,星载观星相机完成精定位,两者配合可将现有的姿态定位精度提升一个数量级。
1990年以前,星载观星相机先后使用析像管和电荷耦合器件(charge-coupled device,CCD)作为探测器件,相比于析像管,采用CCD作为探测器件具有巨大优势。与CCD相比,CMOS具有功耗低、成本低、集成度高、抗辐射能力强等明显的优势,尤其是随着CMOS APS(Active Pixel Sensor,有源像素传感器)技术的成熟,使星载观星相机可以存储整个导航星表,实现星图自主识别,CMOS已在诸多领域取代了CCD,成为理论研究与工程开发中的热点话题。
本文以CMOS探测器为研究对象,以空间应用为背景,设计了一款分辨率2k×2k的星载观星相机。首先对选用的CMOS图像传感器进行了抗辐照实验,然后简单介绍了相机的光学设计部分,其次重点介绍相机电子学设计部分,电子学设计采用现场可编程门阵列作为主控制器[6-7],严格控制信号的时序关系,最后在吉林空间目标观测基地进行了外场成像实验。通过实验可知,相机工作性能稳定,成像质量高,可观测的星数以及星等完全满足项目需求。
1 相机的光学设计
首先,对CMOS探测器进行抗辐照测试。拟选用NOIP1SN025KA型CMOS探测器,NOIP1SN025KA[8]是美国安森美半导体公司生产的2600万像素数字图像传感器,总像素为5120(H)×5120(V),像元尺寸4.5mm×4.5mm,量化位数10位,最高帧频可达80帧/s,工作温度-40℃~+85℃。
为确保相机在轨正常工作,对NOIP1SN025KA型CMOS探测器进行了抗辐照测试。为确保抗辐照测试的准确性,采用两片NOIP1SN025KA进行测试。在累积剂量点分别为:10krad(Si)、30krad(Si)、50krad(Si)、75krad(Si)时,利用图像平均灰度值方法对暗电流、噪声、响应度分别进行了测试。测试结果表明,选用的CMOS芯片满足项目对抗辐照的要求(辐照计量>15krad(Si)),满足空间任务需求。表1为部分辐照测试结果。
星载观星相机采用卡式系统,本文基于初级像差理论和光学设计方法,设计了一套适用于星载观星相机的光学系统。
光学系统首先需要确定以下参数指标:工作波长、焦距、F数、入瞳直径、光阑位置等,下面将根据本文的实际项目需求,确定本次设计的星载观星相机光学系统的有关光学参量。
根据选用的CMOS探测器的像面尺寸、像元尺寸以及应用需求,确定光学系统设计参数如表2所示。

表2 光学系统设计参数
根据光学系统设计参数以及优化处理,得到该相机光学系统结构布局如图1所示。由图1可知,该光学系统易于加工、结构合理、成像质量良好、满足设计要求。
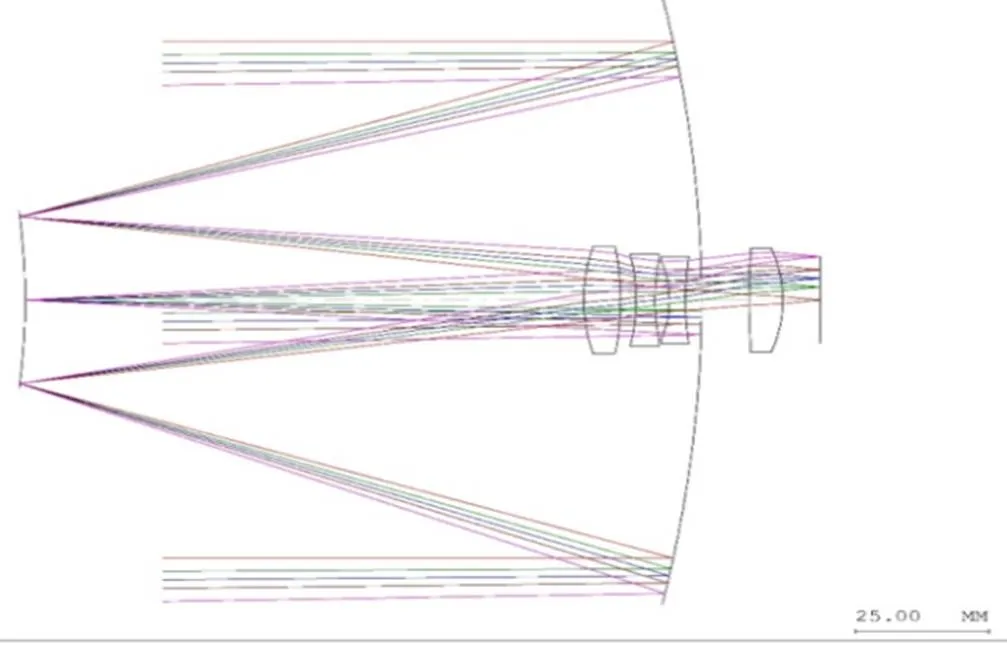
图1 星载观星相机光学系统结构布局
此外,光学系统的反射镜部分采用镀铝和保护膜,透镜部分采用了耐辐射玻璃,以上设计可以保证光学系统在轨工作时的抗辐照性能。
2 相机电子学设计
2.1 相机的硬件设计
相机成像系统的控制核心为赛灵思公司军用FPGA,型号为XQ4VSX55,控制CMOS输出数字视频信号;探测器选用美国安森美半导体公司的NOIP1SN025KA,输出符合要求的图像。系统结构如图2所示。
其中,电源模块主要由电源转换芯片组成,提供系统所需的电源;晶振模块为整个系统提供时钟;FLASH用于存储;TLK2711接口将图像数据发送给卫星数传分系统。
2.2 星载CMOS相机软件设计
只有将软件设计与硬件电路结合起来,才能保证CMOS相机正常工作,本软件主要完成以下功能:
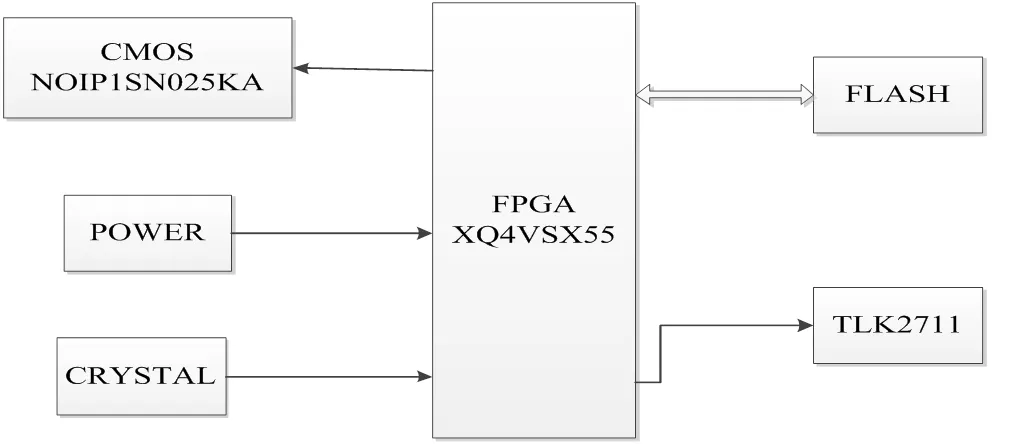
图2 电子学系统硬件结构
1) CMOS相机的控制和图像数据的采集,其中曝光时间、增益、帧频等可通过软件进行控制;
2) 通过感兴趣区域实现对地成像,成像尺寸2048(H)×2048(V),帧频20fps;
3) 观星,同时将高于阈值的点的灰度值和、坐标以帧格式传回,帧尺寸为2048(H)×2048(V),帧频20fps;
4)图像信息暂存以及图像传输。
系统在ISE 14.7开发环境下,使用Verilog编写时序程序,采用自顶向下的设计方法。本设计将整个系统划分为几个基本单元模块,并将子模块进行层层分解。在仿真和调试过程中先完成上层系统,再设计其中的子模块,可以及时发现问题并完善程序,有效地提高了设计效率。
NOIP1SN025KA的电源种类较多,包括参考电压源、像元电源、数字和模拟输入电源,电压值均为固定电压。为了保证星载观星相机的正常工作,星载观星相机CMOS各种电源有上下电顺序要求,上下电顺序间隔要求大于20ms,设计时间隔均设计为1ms。FPGA控制CMOS上下电顺序如图3所示。
CMOS探测器加电后,需要进行寄存器配置,配置接口协议遵照SPI协议,信号除了使能信号、时钟信号以外,还包括配置写入信号和配置读出信号,其配置时序如图4所示。
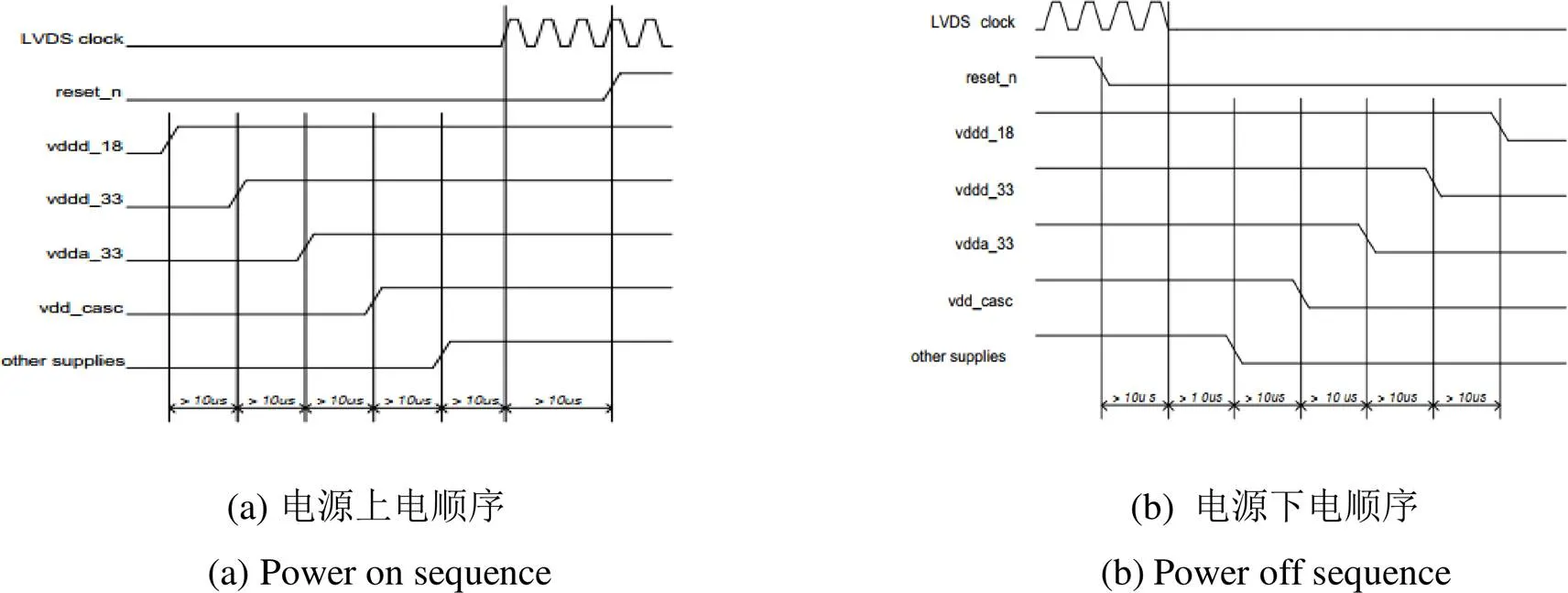
图3 电源上下电顺序
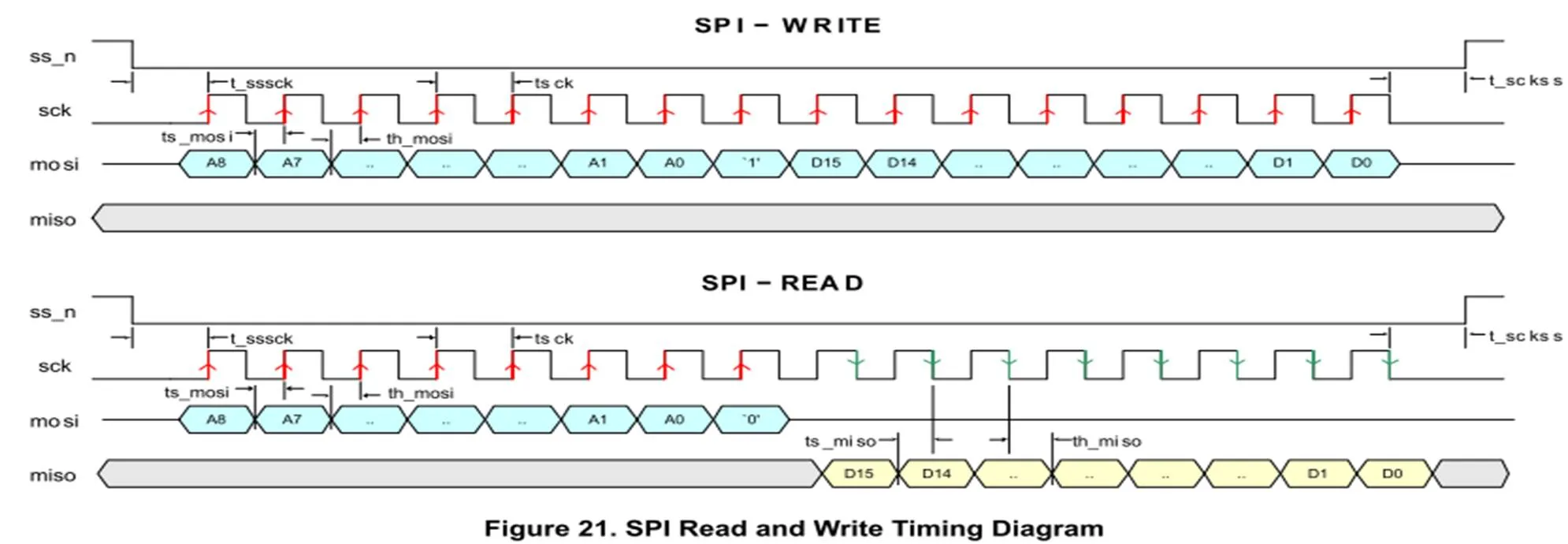
图4 NOIP1SN025KA配置时序
CMOS成像单元与相机控制器内部通讯接口采用LVDS串行异步通信方式。LVDS串行异步通信方式的数据位功能如下:1位起始位、8位数据位、1位奇校验位、1位终止位。多字节数据传送时,先传送最高字节数据,然后传送次高字节数据,最后传送最低字节数据。每次通讯低位在前、高位在后。通信速率为10Mbps。CMOS成像单元与卫星数传分系统的数据传输接口采用TLK2711(高速SerDes传输方式),数据传输速率范围为1.6~2.5Gbps,接口采用高速同轴线缆作为高速传输介质。
为验证程序的有效性以及正确性,对程序进行了仿真,仿真时钟为20MHz,仿真结果如图5所示。仿真波形与预期波形一致,设计的程序有效、合理,满足项目需求。
3 相机的结构设计
根据星载观星相机应用环境要求,在运载阶段存在冲击振动的工况,在轨运行存在重力释放和环境温度变化工况。因此,星载观星相机的光机结构必须有良好抗振动和冲击能力,能够耐受较宽的力热环境并保持成像质量,且需要尽量采用成熟工艺进行结构设计,以确保产品良好的工艺性,保证可靠性要求。
星载观星相机结构如图6所示,总高度555mm,直径185mm,总重量约6.00kg。采用计量筒(殷钢)支撑次镜的设计方案,保证主次镜间隔变化在温度变化工况下满足公差要求。反射镜组件设计有径向和轴向柔性,保证光学表面在力热环境下的面形精度。校正镜组件采用压圈切向压紧镜片的安装方式,对镜片的应力小,对中性好,耐冲击和振动,能够保持良好的结构稳定性。整机通过主镜背板与卫星连接。
星载观星相机的机械结构部分主要由主镜组件、次镜组件、校正镜组件、遮光罩、支腿等部分组成,通过综合考虑,主要选用了微晶玻璃、殷钢、TC4等材料,选用的材料及属性如表3所示。
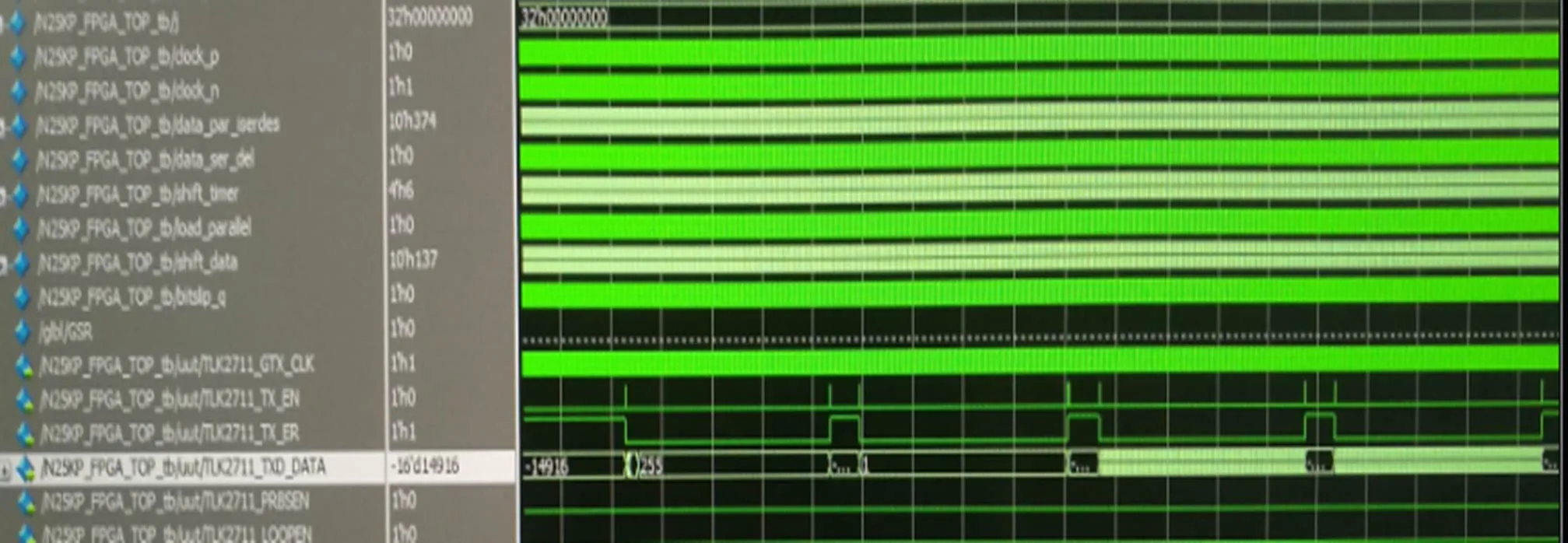
图5 顶层仿真波形
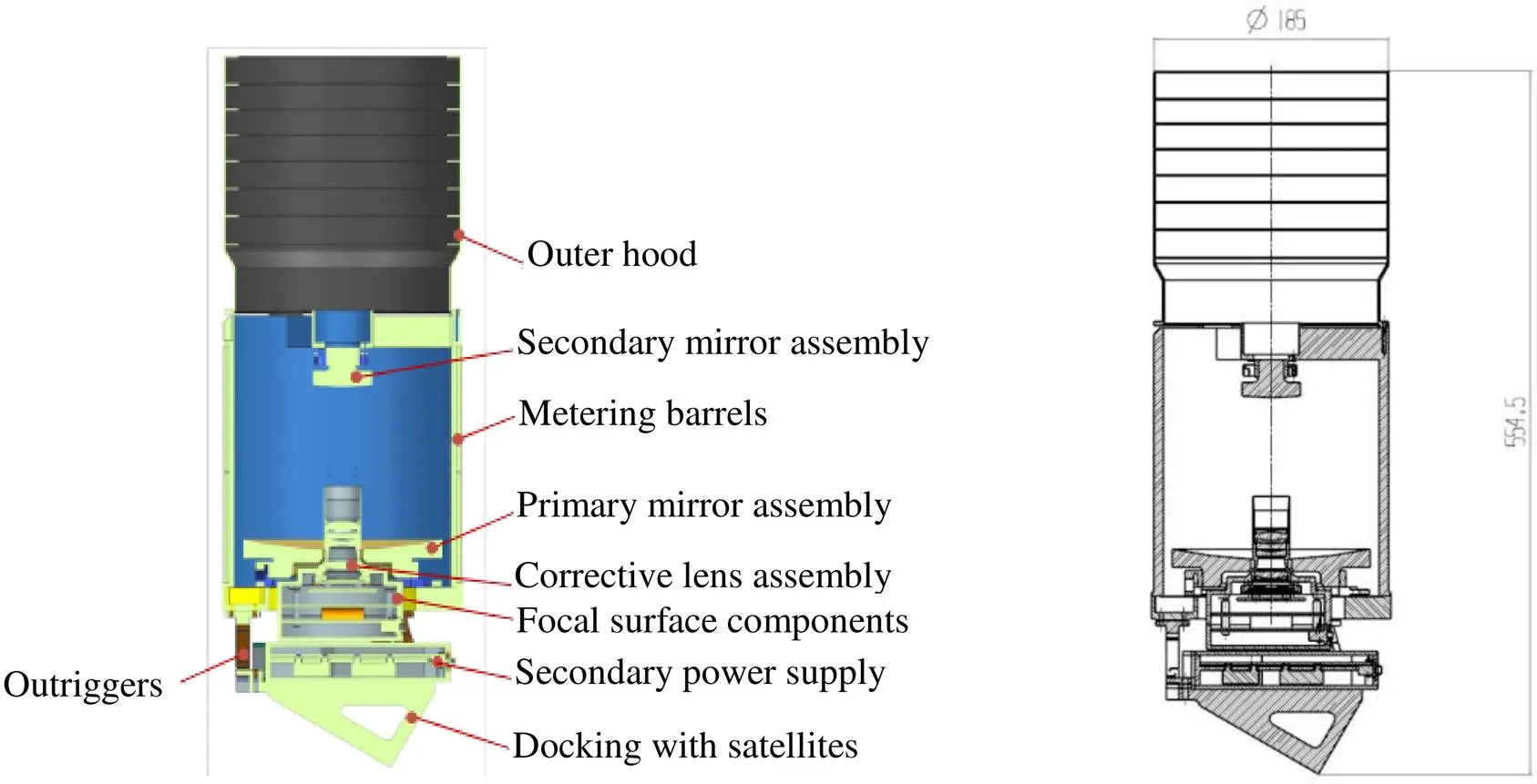
图6 星载观星相机结构尺寸

表3 相机组件材料及属性
主镜通过轻量化后,与主镜柔节通过光学粘接剂连接;主镜柔节与主镜背板通过螺钉连接,形成主镜组件,如图7所示。次镜通过轻量化后,与次镜柔节通过光学粘接剂连接;次镜柔节与次镜辐板通过螺钉连接,通过次镜调整垫调整,形成次镜组件,如图8所示。
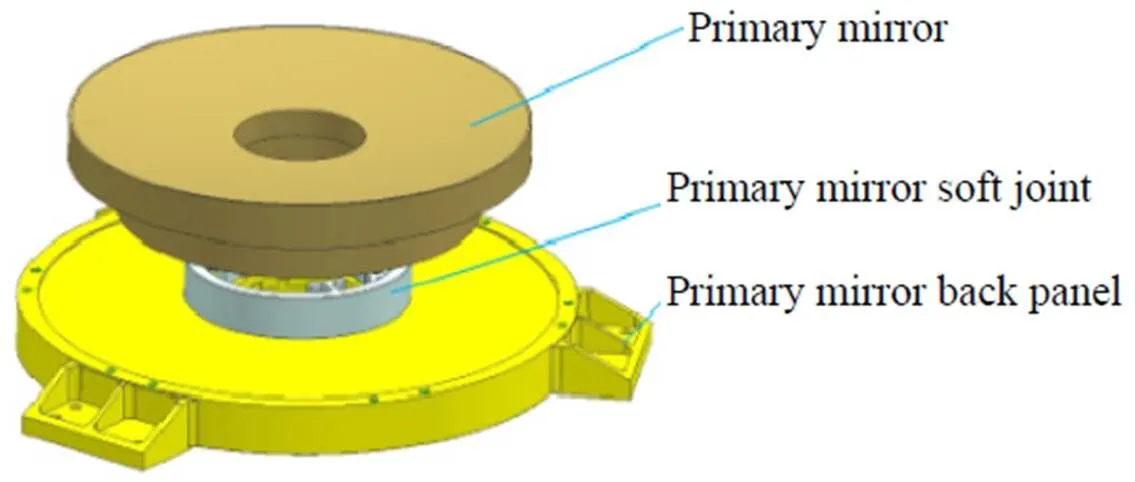
图7 主镜组件结构模型
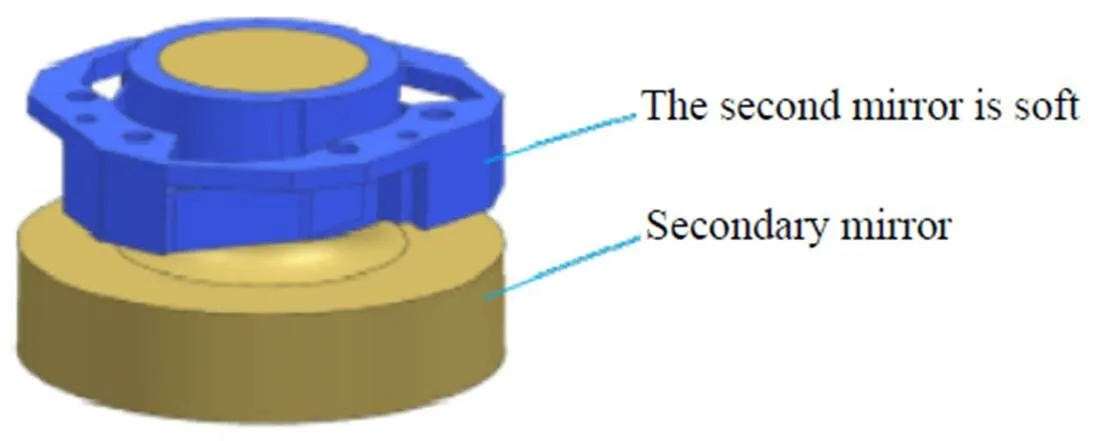
图8 次镜组件结构设计
本文对星载相机的机械结构进行了设计建模,在此基础上建立了相机的有限元模型,结构均采用实体单元建立,节点数量为123502,单元数量为82839,如图9所示;在方向以及方向施加了1个(1倍于地球表面重力加速度)的惯性载荷,进行了相机静力学特性分析,表4列出了主镜组件以及次镜组件的部分分析结果。
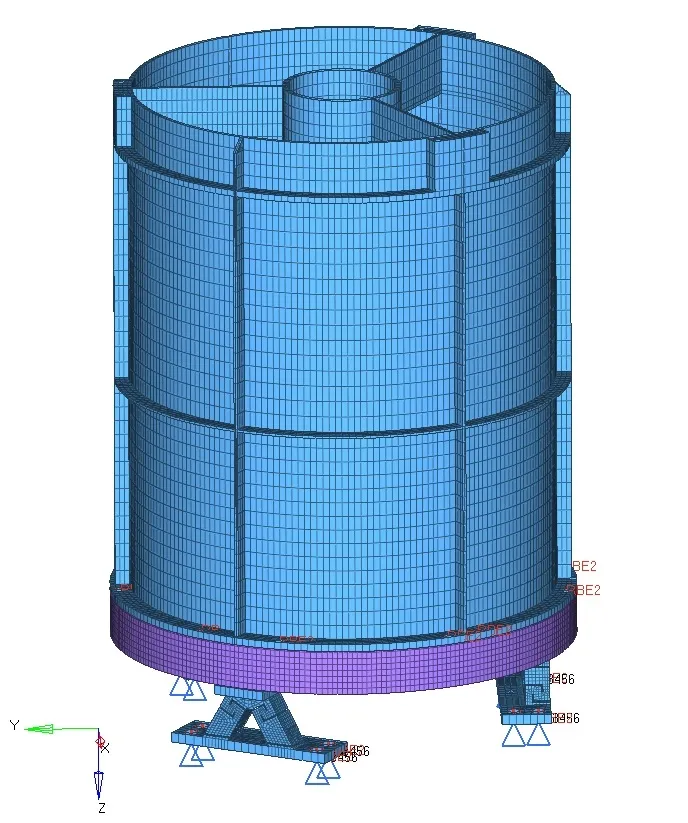
图9 相机结构有限元模型
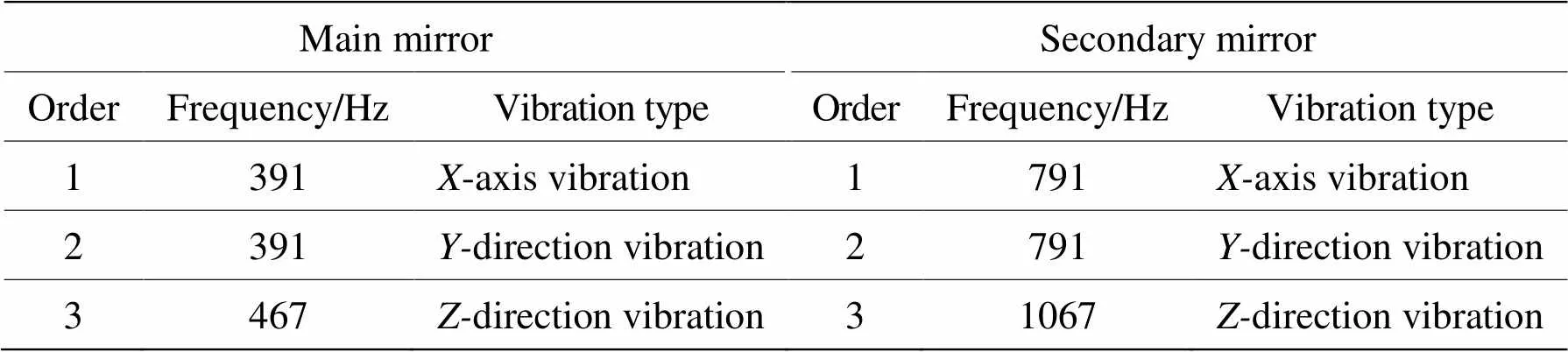
表4 主次镜组件模态分析结果
通过对各个组件以及对整机的分析,验证了设计的合理性和有限元模型的正确性,相机的结构设计满足项目在轨成像需求。
4 实验结果
为验证相机的拍摄效果,在吉林空间目标观测基地进行了外场成像实验。吉林空间目标观测基地实验星载观星相机参数:焦距150mm,F数为1,口径150mm,视场8.8°(圆形)、像元尺寸4.5mm。可通过等效计算验证本相机的性能,吉林基地的星载观星相机的口径面积为真实星载观星相机的0.66倍,即入射光的能量为66%,F数为真实星载观星相机的0.25倍,即艾里斑面积为真实星载观星相机的1/16。即实验用星载观星相机若想与星载观星相机在单位面积上的光照度相同,需要将积分时间缩短23.04倍,但是考虑实际光学系统所成像的最终星点的图像不可能为1×1,故可暂不考虑艾里斑过小带来的影响,即实验用的星载观星相机在考虑大气透射率为60%的情况下,积分时间可取为10.56ms。将本相机成像电路板和法兰安装在基地的150mm口径的镜头上,如图10所示。

图10 CMOS成像电路板安装在基地镜筒上
实验用的相机对天空的指向相对大地是固定的,但由于地球自转的关系,望远镜对天区的指向是一直在变化的,需要在现场对所指向的天区进行确认。经过现场确认(用激光笔指向天空,让光束落在相机的视场中心,再经过手机星图软件现场比对),视场的中心大致在北斗七星中天枢与天璇连线的延长线上,如图11所示。
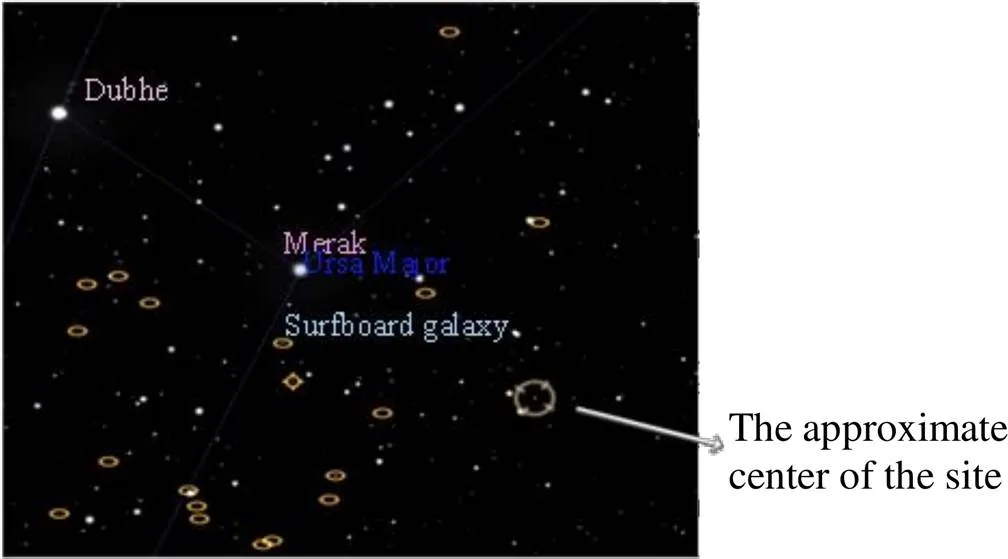
图11 拍摄星空的大致位置
图12给出了视场中最亮的几颗星,灰度值达到了饱和,星等为6.3~6.6等星(人眼看不见),以这些星为参考,给出视场中能看到的最暗的星。
视场中刚好能看到的星为8.8等星,其灰度值为6/255。在处理星图的时候,二值化的阈值选择了16/1023,因为很多本底噪声的码值已经到了这个阈值。刚好看不见的星为8.9等星,如图13所示。考虑到在实验时积分时间取值时参考的大气透射率为60%,而视场中心方向的高度角很低,与地平线的夹角小于30°,大气的厚度较厚,故可认为星载观星相机按照现有的参数设计可以在太空中观测到9等星。
若利用阈值法进行压缩,传输灰度值需要16bit,传输图像中对应的横纵坐标需要32bit,因此,相应的传输信息量提高了3倍。传输的最大数据率是2k×2k(20fps),故在5k×5k(40fps)的视场中,超过阈值的像元占比不能高于2.67%。
对外场实验的实验数据进行统计整理,该拍摄天区共有133颗恒星(6.3~8.8等),视场范围8.8°,对应星载观星相机2.4°视场范围相当于可以拍摄到10颗星。
利用阈值法对星图进行处理和统计,将阈值取为16/1023时,其超过阈值的像素数为134389个,约占像元总数(5120×5120)的0.512%。在该阈值下,虽然有噪声的影响,但是远小于2.67%,故完全可以将所有大于阈值的像元全部传输下来。
从图14中可见,星载观星相机指向不同天区时,能观测到的星数主要集中在5~15颗范围内,最大可观测星数为96颗,所占像元数约为10000个,相比噪声所占的像元数(130000个)仍然很低,大于阈值的像元数为0.5%左右,因此,可通过传输系统进行传输。
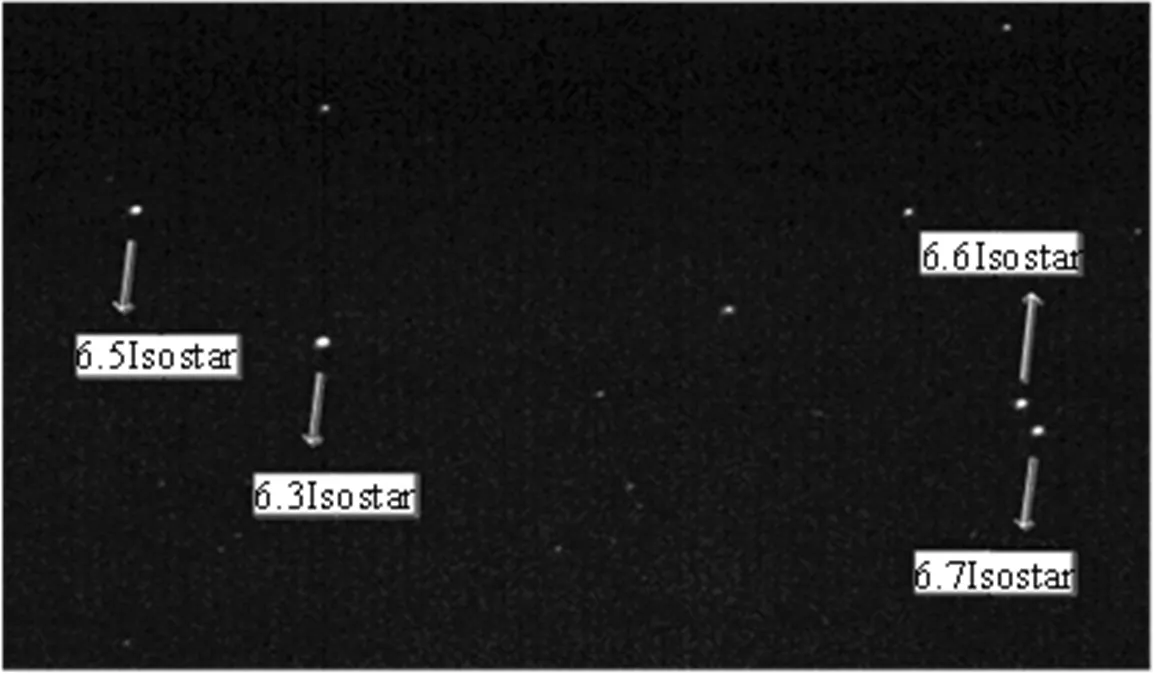
图12 视场中最亮的几颗星
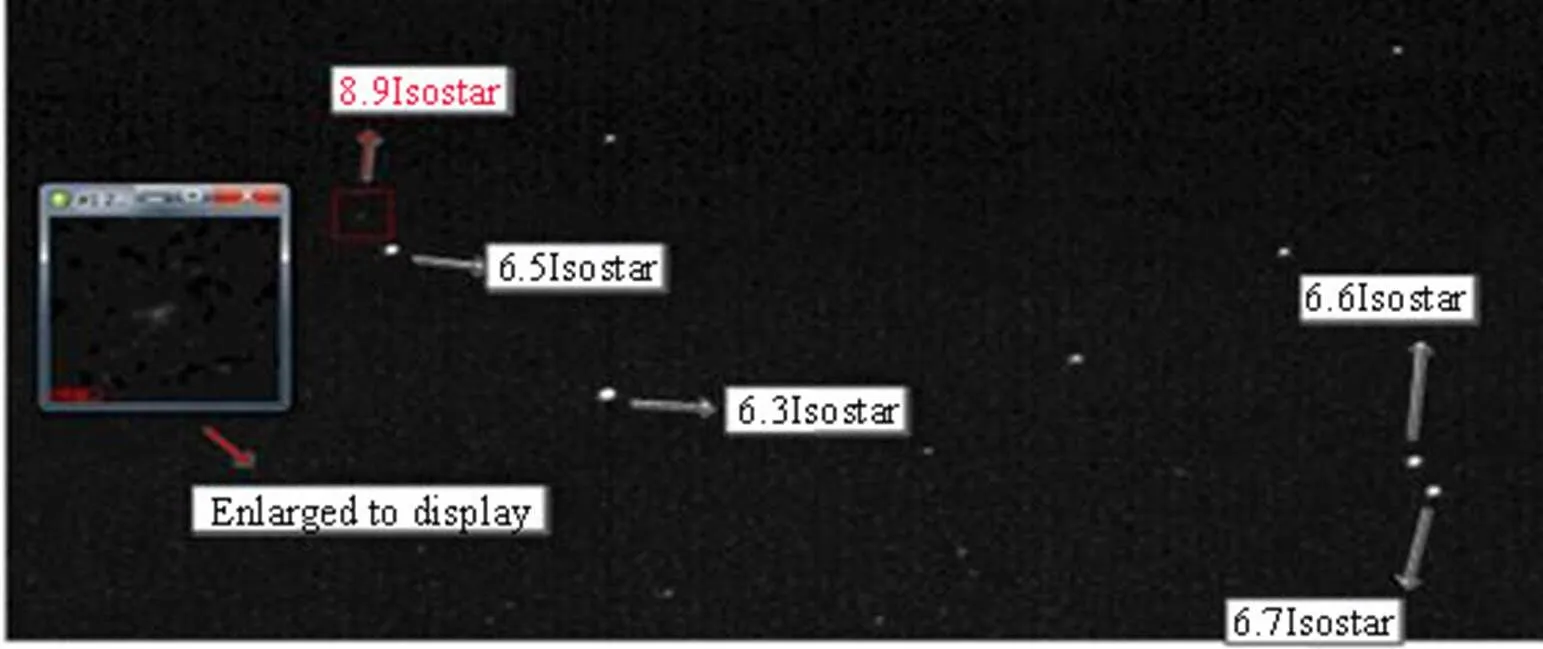
图13 视场中与噪声灰度值相同的8.9等星
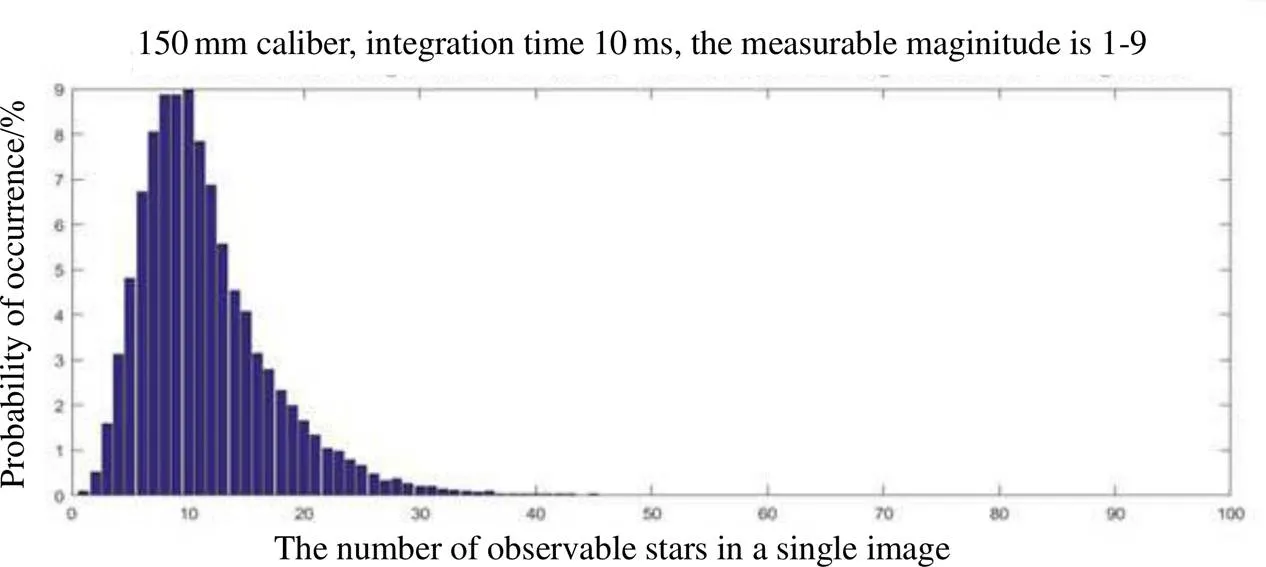
图14 星空不同位置观星数量的概率分布
5 总结
笔者以现场可编程门阵列作为核心控制器件,使用NOIP1SN025KA型CMOS探测器,以航天应用为背景,设计并实现了一款功能完整的观星相机。采用易于加工、结构合理的光学系统;光机结构具有良好抗振动和冲击能力,能够耐受较宽的力热环境并保持成像质量;兼顾电磁兼容的同时,采用低功耗器件。实验结果表明,相机成像质量良好、移植性强、可靠性高。视场角范围内,可以拍摄到约10颗星,同时可以观测到9等星,满足项目需求。未来与传统星敏感器匹配使用,可有效地提升相机定姿精度。
[1] 何家维. 高精度全天时星敏感器关键技术研究[D]. 北京: 中国科学院大学, 2013.
HE Jiawei. Study on the Key Technologies for High-accuracy and All-time Star Sensor[D]. Beijing: University of Chinese Academy of Sciences, 2013.
[2] 王军. 高动态星敏感器关键技术研究[D]. 北京: 中国科学院大学, 2019.
WANG Jun. Research on Key Technologies of High Dynamic Star Sensor[D]. Beijing: University of Chinese Academy of Sciences, 2019.
[3] 罗丽燕. 基于星敏感器的星点提取与星图识别方法研究[D]. 西安: 西安电子科技大学, 2015.
LUO Liyan. Research on Star Point Extraction and Star Map Recognition Methods Based on Star Sensors[D]. Xi'an: Xi'an University of Electronic Science and Technology, 2015.
[4] 段宇恒, 管亮. 基于精密星敏感器的航天器高精度姿态测量标定方法[J]. 计算机测量与控制, 2019, 27(11): 1-5.
DUAN Yuheng, GUAN Liang. A high-precision attitude measurement calibration method for spacecraft based on precision star sensors[J]., 2019, 27(11): 1-5
[5] WANG W, WEI X, LI J, et al. Optical parameters optimization for all-time star sensor[J]., 2019, 19(13): 1-17.
[6] Moshe B. High resolution large format tile-scan camera: design, calibration, and extended depth of field[C]//2010, 2010, 5585: 5585095.
[7] 黄辉, 周进. 基于现场可编程门阵列的CCD相机自动调光[J]. 光学精密工程, 2014, 22(2): 426-433.
HUANG Hui, ZHOU Jin. Automatic dimming of CCD camera based on field programmable gate array[J]., 2014, 22(2): 426-433.
Design and Hardware Implementation of Spaceborne Stargazing Camera System
XU Dongdong1,FU Tianjiao2,DU Limin1,ZHU Junqing2
(1.,,130022,;2.,,,130033,)
A complete star-viewing camera was designed using a NOIP1SN025KA CMOS detector to improve the accuracy of attitude satellites. The anti-irradiation experiment was conducted using 60Co-gradiation source under the environmental conditions of 24℃ irradiation temperature, 24℃ test temperature, and 37% RH test humidity. Subsequently, an optical system with a focal length of 500mm, an F-number of 4, and a field of view of 2.4°are designed. The electronic system uses an FPGA as the core control device to control the CMOS output digital signal and transmits the signal back to the satellite data transmission system through TLK2711. The mechanical structure was mainly composed of a main mirror component, secondary mirror component, correction mirror component, baffle, and leg. The design scheme of the measuring cylinder (invar) supporting the secondary mirror was adopted to ensure that the interval change of the primary and secondary mirrors satisfied the tolerance requirements under the condition of temperature change. The mirror assembly was designed with radial and axial flexibility to ensure accuracy of the shape of the optical surface in the thermal environment. In the correction mirror assembly using pressure ring tangential pressing lens installation, the lens stress is small, good to neutral, impact, and vibration resistance, and can maintain good structural stability. The machine is connected to a satellite through the main mirror backplane. A star camera has two working modes: imaging and transmission of the threshold and coordinate information of the star point. Field imaging experiments showed that the camera exhibited good imaging quality, portability, and reliability. Approximately ten stars can be captured in the field of view, approximately 10 stars can be captured,and nine stars can be observed, which can effectively assist the star sensor.
attitude accuracy, optical system, FPGA, threshold
TP73
A
1001-8891(2023)12-1286-08
2022-05-27;
2022-10-10.
徐冬冬(1987-),讲师,研究方向:光电成像与图像压缩。E-mail: 1069292478@qq.com。
国家自然科学基金项目(11803036)。
猜你喜欢
应用光学(2023年3期)2023-06-05 09:21:56
光学精密工程(2022年23期)2023-01-06 14:59:22
天天爱科学(2018年10期)2018-10-26 07:36:40
天天爱科学(2018年4期)2018-09-10 23:13:04
天天爱科学(2018年3期)2018-09-10 00:23:56
航天返回与遥感(2018年2期)2018-05-17 09:43:32
天天爱科学(2017年10期)2017-10-13 07:53:13
光学精密工程(2016年11期)2016-12-19 02:30:19
光学精密工程(2016年5期)2016-11-07 09:06:06
激光与红外(2014年8期)2014-03-20 08:50:22