多波段图像融合系统光轴平行性装调技术研究
2024-01-03 07:33:58陆庆华张春鹏皮冬明向柳静文洪青何新宇
红外技术 2023年12期
张 奇,陆庆华,郭 骞,张春鹏,皮冬明,向柳静,文洪青,何新宇
多波段图像融合系统光轴平行性装调技术研究
张 奇,陆庆华,郭 骞,张春鹏,皮冬明,向柳静,文洪青,何新宇
(云南北方光电仪器有限公司,云南 昆明 650032)
本文基于一种多波段图像融合系统,对系统光轴平行性装调技术进行研究。系统为五光轴平行系统,包括白光模块、微光模块、短波红外模块、长波红外模块、激光测距模块,通过计算得到精度最高的为微光模块,精度为32.09²,即平行性偏差小于32.09²不影响系统使用。装调时采用光轴中心与平行光管十字靶板中心对准的方法,得到的图像为最大图像尺寸的99.89%,对图像信息获取不产生影响。最后用搭建好的平台对系统进行实验验证,实验证明平行性最大偏差为9″,小于系统最大允许误差,所以得出结论该装调方法对类似产品的装调具有一定参考价值。
图像融合;光轴平行性;平行性偏差;中心对准
0 引言
针对现代战场复杂的战场环境及伪装手段日益升级,单一波段的侦察系统难以满足作战需要,所以需要一种多波段图像融合系统符合现代使用场景,多波段图像融合系统是一种多波段、多光轴系统。
现如今装调的多是两轴或三轴系统[1-2],模块数量不多,对协调各个模块的要求不高。多波段图像融合系统为五光轴平行系统,模块较多,需要在轻量化、小型化、功能强的前提下保证光轴平行性。基于这种现实状况,本文对多波段图像融合系统光轴平行装调技术进行了研究。
1 装调原理
1.1 系统组成
多波段图像融合系统通过多波段成像组件,实现可见光、近红外、短波红外、长波红外的常用波段覆盖,系统具备反伪装侦察、昼/夜侦察、透烟雾侦察、透雨雾侦察的能力等。主要由白光模块、微光模块、短波红外模块、长波红外模块、激光测距模块组成,多波段图像融合系统的外形图如图1所示。
为保证光轴之间的平行性[3-4],将所有模块固定在前面板上,前面板布局如图2所示。

图1 多波段图像融合系统外形
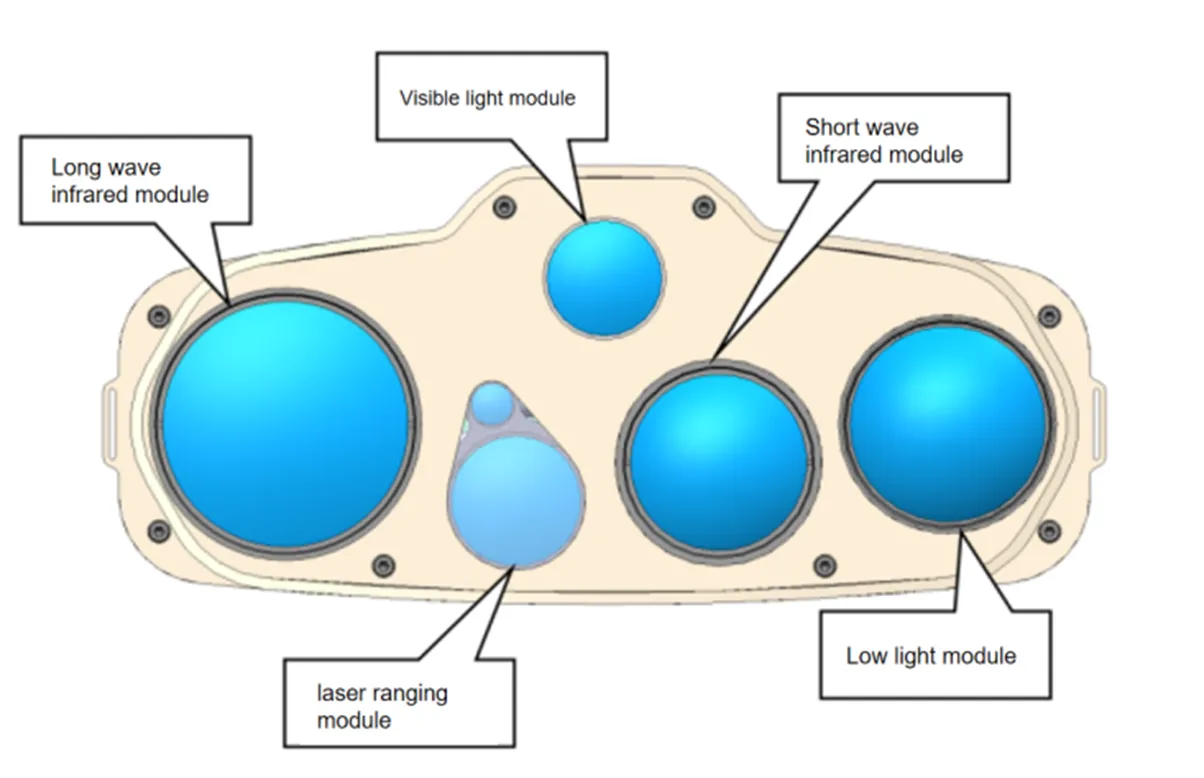
图2 前面板布局
1.2 装调精度
多波段融合系统由多个模块组成,装调时的精度要满足每个模块。
激光测距模块可以对7000m处2.3m×2.3m的目标进行测距,根据式(1)计算得到激光测距模块在7000m处最小可分辨角为:

白光模块、微光模块、短波红外模块、长波红外模块4个模块涉及到对图像进行拼接[5-7],在对图像进行拼接时,为不影响图像质量,一般要求为像素级对准,即对准误差小于一个像素,如表1所示,表中分别是4个模块镜头的焦距和选用探测器单个像元的尺寸。
通过式(2)、式(3)、式(4)、式(5)计算得到每个模块的精度,其中精度表示最小可分辨角。探测器单个像元为最小显示尺寸,通过镜头焦距即可计算出最小可分辨角。
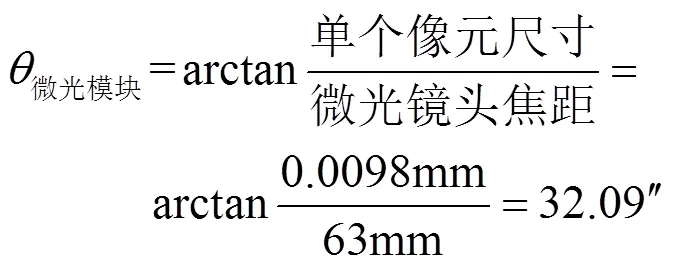
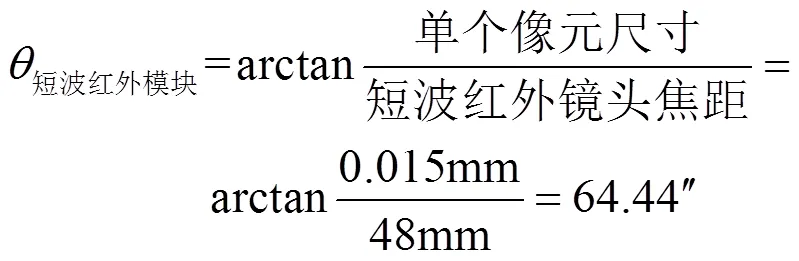
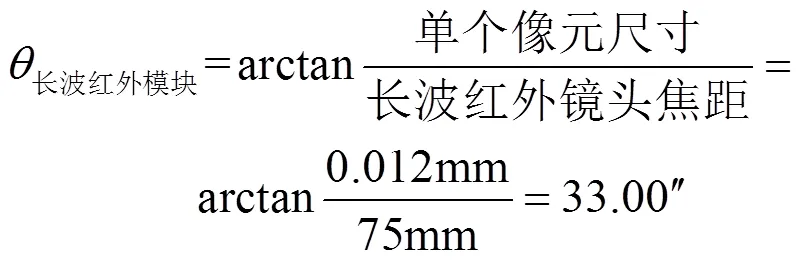
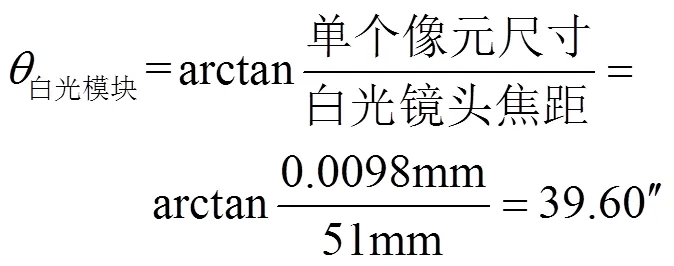

表1 模块参数
计算得到5个模块的精度,其中精度最高的是微光模块,即多波段图像融合系统应满足的装调精度为32.09″。
1.3 装调方法
因为系统涉及到图像融合,为保证得到的图像信息尽可能地保持一致,在设计伊始,针对各模块使用的探测器不同,即像元大小、像元尺寸各有不同,故保证各模块的视场近似一致,尽可能减少拼接后图像信息的损耗。由于像面尺寸不同,视场近似一致,故可以对得到的图像进行等比例缩放,缩放后的图像会更利于图像拼接,不会对图像信息产生影响。如表2为图像尺寸参数。
在拼接时,如果使用边缘拼接的方法,会导致各个模块的光轴发生偏移,所以在系统装调时采用光轴中心与平行光管十字靶板中心对准的方法[8-10],对边缘图像进行裁剪得到的图像信息越接近最大图像信息,则对获取的图像信息产生影响越小。
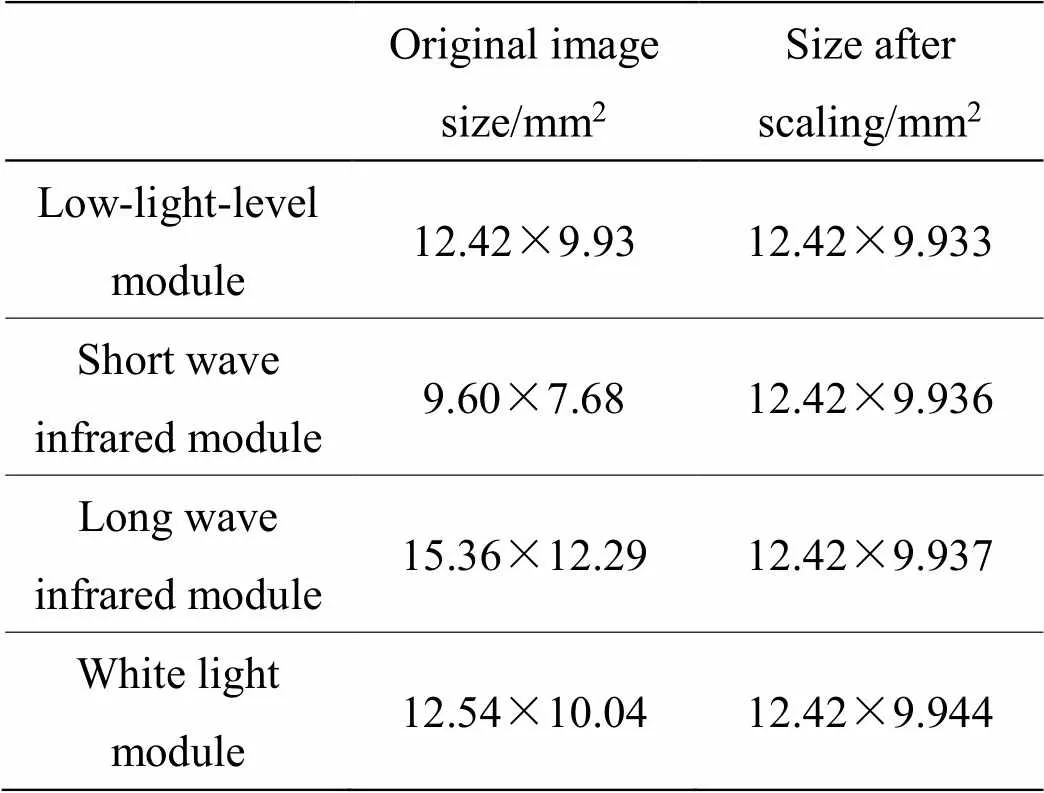
表2 图像尺寸参数
在装调过程中,需要将多波段图像融合系统与十字靶板对准,十字靶板的线宽为0.1mm,平行光管焦距为2000mm,则对准误差为:

得到的误差值远小于32.09″,不会对测量结果产生影响。
因微光模块精度最高,故使用微光模块得到的图像作为底图,可以计算得到图像利用率¶,计算公式如下:
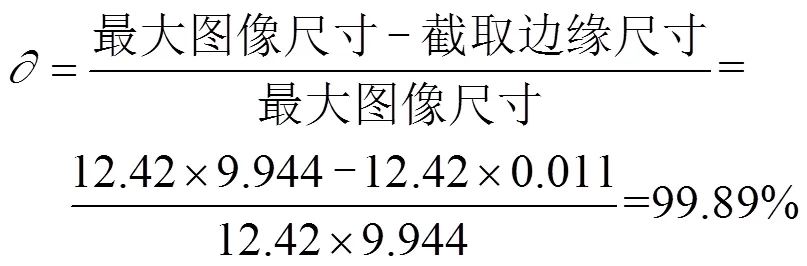
经过截取和拼接后,得到的图像为最大图像尺寸的99.89%,得到的图像面积与最大图像尺寸差距较小,对图像信息获取不产生影响。
1.4 测试方法
装调完成后对系统进行检测,判断系统是否符合使用要求。
将需要观察的十字靶板调整到观测位置,将待测系统放置于光学平台上,用待测系统的各个模块对十字靶板进行观察,首先将待测系统的十字中心对准十字靶板的刻度,然后转动转台,将待测系统的十字中心对准十字靶板中心,根据式(8)计算理论转动角度和测试得到转动角度的差值,差值即为待测系统的平行性偏差。其中理论值为平行光管中角度刻度值,测试值则为两轴转台转动角度显示值。若偏差值小于32.09″,则系统符合使用要求,反之则不符合。
偏差值=理论值-测试值(8)
2 平台搭建
多波段图像融合系统装调平台的主要功能是能够对系统各个模块光轴平行性进行装调。系统主要由平行光管、多波段图像融合系统,两轴转台组成。测试平台如图3所示。

图3 测试平台
2.1 平行光管
平行光管和靶板提供目标,可等效为观察无穷远目标。因装调时涉及到多个波段,为消除色差,选用反射式平行光管[11]。为校准各模块的光轴平行度,选用带有刻度的十字靶板,刻度包含1°~6°即可。在对各个模块进行观察时,将平行光管设置为常温即可,进而使各个模块都可以正常观察,在对激光测距模块进行观察时,将光敏纸与十字靶板中心重合进行校正。如图4为选用的平行光管。

图4 平行光管
2.2 两轴转台
两轴转台由转台和角度显示器组成。转台可以在水平方向和俯仰方向上转动,转动的角度由左侧的角度显示器显示,精度达到了1″,符合测试需求,如图5为两轴转台。
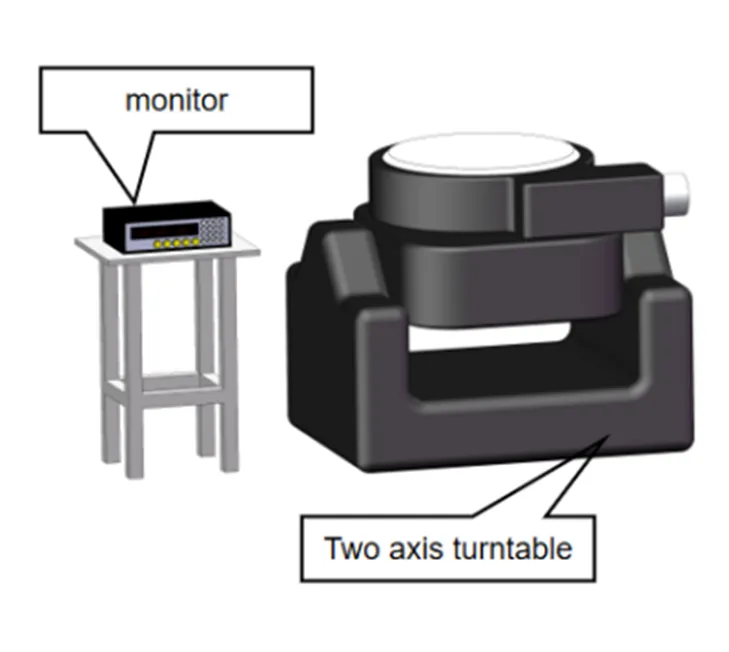
图5 两轴转台
3 实验验证
完成平台搭建和系统装调后,根据测试方法对系统进行试验,根据试验得到待测系统的平行性偏差[12-13],如表3~表7所示。
表3~表7分别表示的是对短波红外模块、激光测距模块、白光模块、长波红外模块、微光模块平行性偏差的结果。分别对1°~6°视场时的俯仰角和方位角进行测量,将测量结果与理论角度进行对比,计算得到偏差值,通过与最大允许偏差值32.09″进行对比,判断装调是否符合使用要求。
通过测试5个模块在1°~6°视场时平行性偏差值,计算得到系统平行性的最大偏差为9″,小于系统最大允许误差。
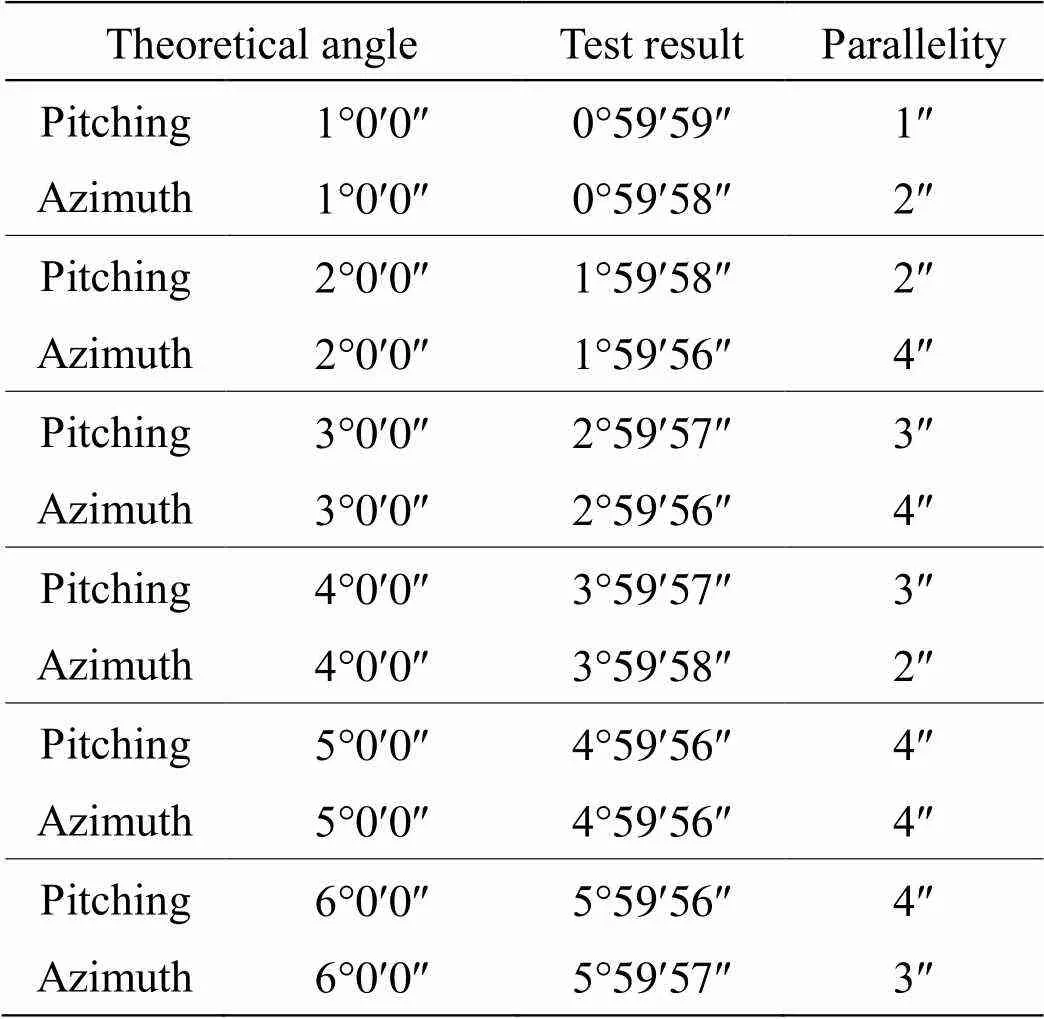
表3 待测系统的平行性偏差(短波红外模块)
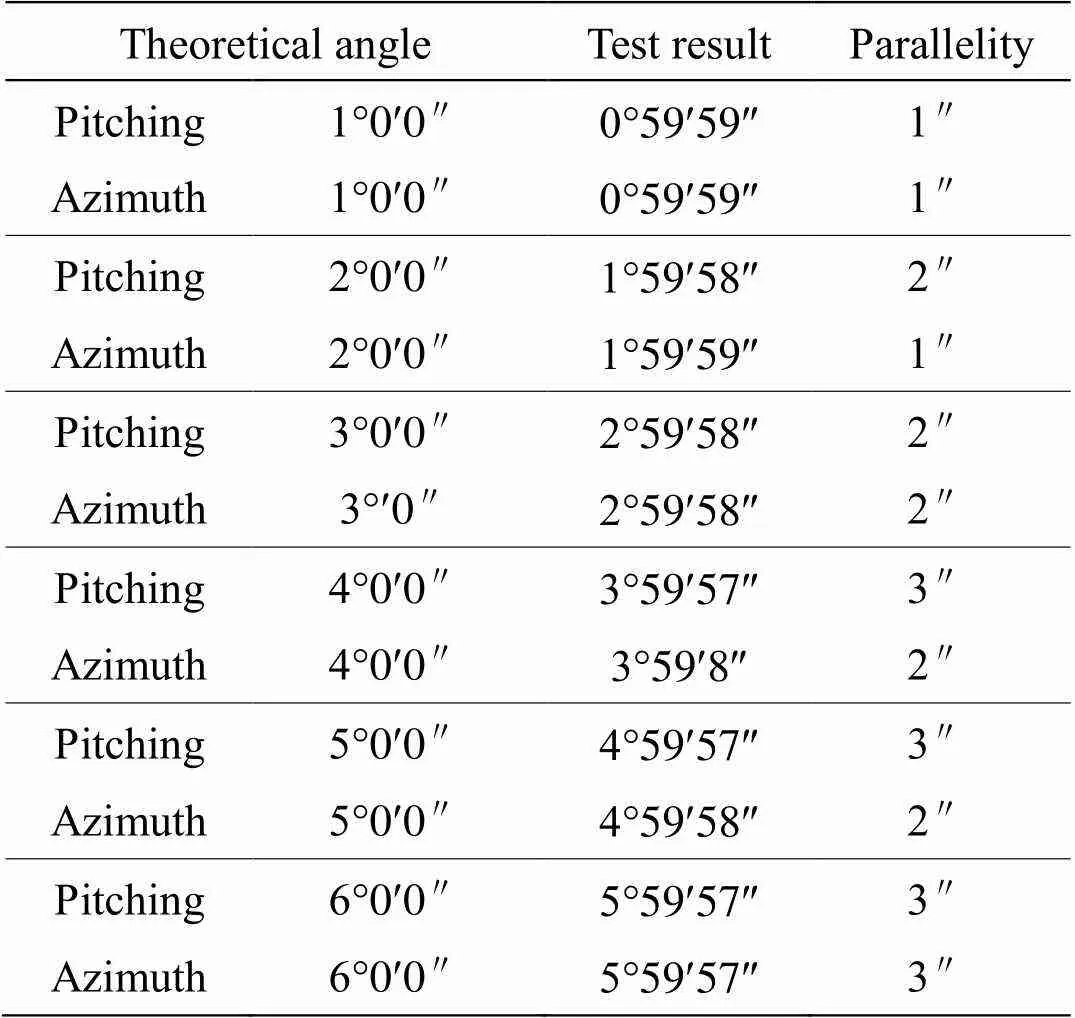
表4 待测系统的平行性偏差(激光测距模块)
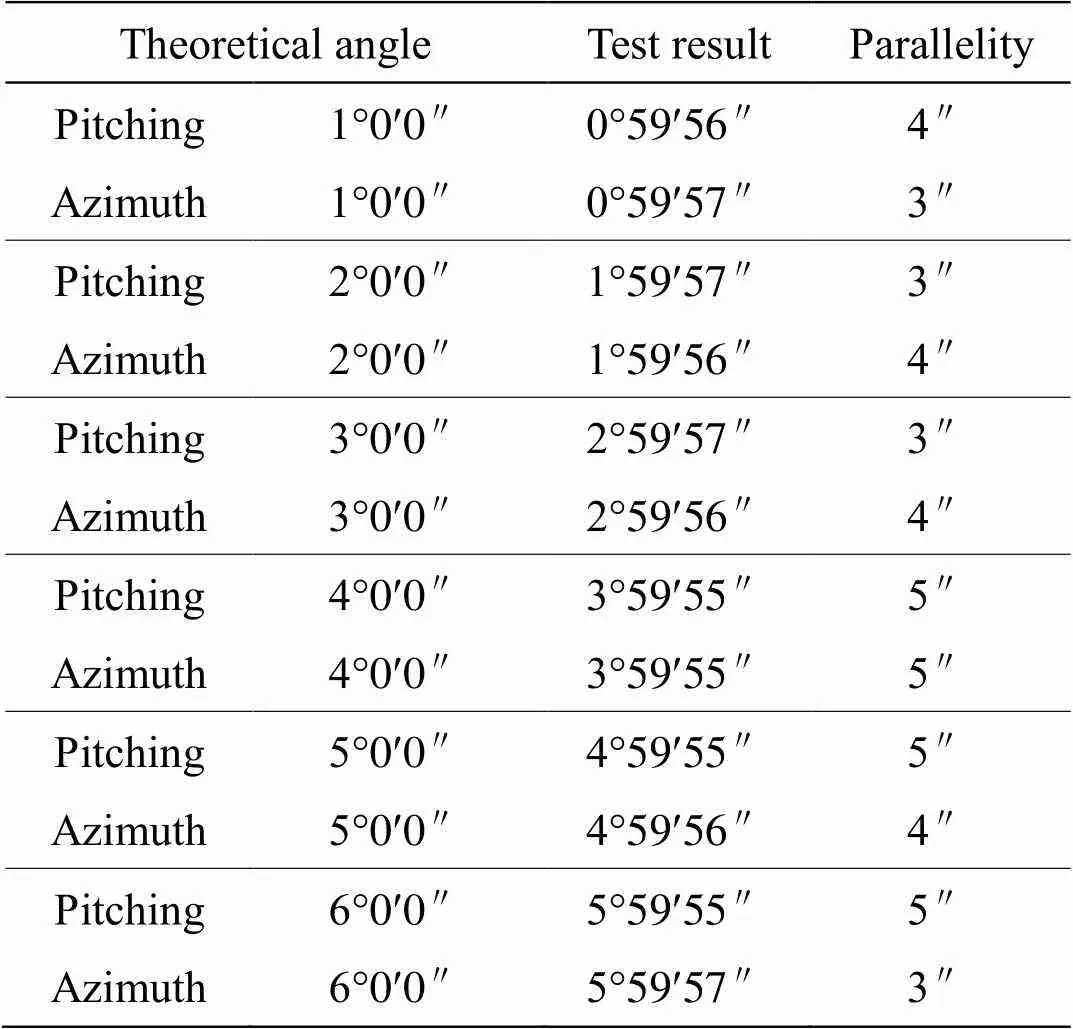
表5 待测系统的平行性偏差(白光模块)
4 结论
本文描述的装调方法主要是为了平衡各个模块之间的光轴平行性,根据像素级对准的要求计算可得到最大允许误差为32.09″,最后对装调好的系统进行测量,实验证明平行性最大偏差为9″,小于系统最大允许误差,所以得出结论该装调方法对类似产品的装调具有一定参考价值。

表6 待测系统的平行性偏差(长波红外模块)

表7 待测系统的平行性偏差(微光模块)
[1] 谢国兵, 李超良, 蔡锦浩, 等. 激光测距机光轴平行性测试方法[J]. 电子测试, 2020(19): 48-51.
XIE Guobing, LI Chaoliang, CAI Jinhao, et al. Test method for optical axis parallelism of laser rangefinder[J]., 2020(19): 48-51
[2] 贾文武, 刘培正, 唐自力, 等. 靶场适用的光电经纬仪光轴平行性检测[J]. 光学精密工程, 2020, 28(8): 1670-1677.
JIA Wenwu, LIU Peizheng, TANG Zili, et al. Detection of optical axis parallelism using photoelectric theodolites suitable for shooting ranges[J]., 2020, 28(8): 1670-1677
[3] 杨雪, 陈文红, 张玺, 等. 宽光谱光电系统多光轴平行性工程化测试方法研究[J]. 激光与红外, 2019, 49(8): 978-982.
YANG Xue, CHEN Wenhong, ZHANG Xi, et al. Research on engineering testing method for multi axis parallelism of wide spectral optoelectronic systems [J]., 2019, 49(8): 978-982
[4] 王瑶, 李岩, 付跃刚. 便携式可见光多光轴平行性校正系统[J]. 长春理工大学学报(自然科学版), 2019, 42(2): 65-68.
WANG Yao, LI Yan, FU Yuegang. Portable visible light multi axis parallelism correction system[J].(Natural Science Edition), 2019, 42(2): 65-68
[5] 赵玮, 昌明, 刘虎, 等. 空间旋转多光轴平行性校准技术[J]. 应用光学, 2018, 39(5): 627-632.
ZHAO Wei, CHANG Ming, LIU Hu, et al. Multi axis parallelism calibration technique for spatial rotation[J]., 2018, 39(5): 627-632.
[6] 徐丹慧, 唐霞辉, 方国明, 等. 基于干涉条纹的光轴平行性校准方法[J]. 光学学报, 2020, 40(17): 129-136.
XU Danhui, TANG Xiahui, FANG Guoming, et al. A calibration method for optical axis parallelism based on interference fringes[J]., 2020, 40(17): 129-136
[7] ZOU Huihui, WU Hongbing, ZHOU Lujun. A testing method of optical axes parallelism of shipboard photoelectrical theodolite[J].(China), 2016, 9684: 96841V-96841V-5.
[8] 谢国兵, 薛永刚, 晁格平, 等. 基于LABVIEW的多光轴平行性测试方法[J]. 应用光学, 2018, 39(6): 856-861.
XIE Guobing, XUE Yonggang, CHAO Geping, et al. Multi axis parallelism testing method based on LABVIEW[J]., 2018, 39(6): 856-861.
[9] 应家驹, 陈玉丹, 武东生, 等. 双目光轴平行性检校仪检测精度分析[J].激光与红外, 2018, 48(6): 750-755.
YING Jiaju, CHEN Yudan, WU Dongsheng, et al. Analysis of testing accuracy of binocular optical axis parallelism calibration instrument[J]., 2018, 48(6): 750-755.
[10] 崔启胤. 大间距光轴平行性检测方法研究[D]. 长春: 长春理工大学, 2018.
CUI Qiyin. Research on the Detection Method of Large Distance Optical Axis Parallelism[D]. Changchun: Changchun University of Technology, 2018.
[11] 王志强. 350mm口径离轴反射式平行光管的设计[D]. 长春: 长春理工大学, 2020.
WANG Zhiqiang. Design of 350mm Off-axis Reflective Collimator[D]. Changchun: Changchun University of Technology, 2020.
[12] YING Jiaju, CHEN Yudan, LIU Jie, et al. Design and realization of photoelectric instrument binocular optical axis parallelism calibration system[C]//on, 2016: 10155: 101550X.
[13] 黄富瑜, 李刚, 史云胜, 等. 多光谱多光轴平行性检测方案设计与误差分析[J]. 光电工程, 2019, 46(2): 12-20.
HUANG Fuyu, LI Gang, SHI Yunsheng, et al. Design and error analysis of multi spectral and multi axis parallelism detection scheme[J]., 2019, 46(2): 12-20.
Research on Optical Axis Parallelism Adjustment Technology for Multi band Image Fusion System
ZHANG Qi,LU Qinghua,GUO Qian,ZHANG Chunpeng,PI Dongming,XIANG Liujing,WEN Hongqing,HE Xinyu
(Yunnan North Optical&Electron Instrument Co., Ltd., Kunming 650032, China)
This article is based on a multiband image fusion system and studies the alignment technology of the parallelism of the optical axis of the system. The five-axis parallel system includes a white light module, low light level module, short wave infrared module, long wave infrared module, and laser ranging module. The lowest light level module with the highest accuracy was 32.09. A parallelism deviation of less than 32.09 does not impact the system's usability. During installation and adjustment, the optical axis was aligned with the center of the collimator cross-target plate. This alignment produced an image size that is 99.89% of the maximum possible, which does not hinder the acquisition of image information. Finally, the system is verified experimentally using the developed platform. Experiments proved that the maximum deviation of the parallelism was nine, which is less than the maximum allowable error of the system. Therefore, this assembly and adjustment method had a certain reference value for the assembly and adjustment of similar products.
image fusion, parallelism of optical axis, parallelism deviation, center alignment
TH74
A
1001-8891(2023)12-1294-05
2023-07-26;
2023-08-08.
张奇(1996-),男,吉林省长春市人,硕士,工程师,主要研究方向为光学设计。E-mail:1021154748@qq.com。
陆庆华(1981-),男,壮族,广西省百色市人,学士,高级工程师,主要研究方向为体设计。E-mail:99711694@qq.com。
猜你喜欢
科学技术与工程(2023年22期)2023-08-23 07:17:58
中国交通信息化(2022年12期)2022-02-11 12:05:14
机电工程技术(2021年6期)2021-07-25 15:46:54
摄影之友(2020年12期)2020-12-23 09:39:39
水利科技与经济(2016年8期)2016-04-22 03:41:48
设备管理与维修(2016年5期)2016-03-16 02:20:44
重庆建筑(2015年12期)2015-11-19 07:32:48
电测与仪表(2015年8期)2015-04-09 11:50:12
西南军医(2015年1期)2015-01-22 09:08:39
山西建筑(2014年36期)2014-08-08 02:13:37