基于多传感器模糊融合的火灾检测*
2024-01-03 10:59杨素珍
九江学院学报(自然科学版) 2023年4期
杨素珍
(1漳州职业技术学院智能制造学院 福建漳州 363000;2福建省特种装备安全与测控重点实验室 福建福州 350003)
火灾往往给人类带来了巨大的人员财产损失,为减少火灾危害,进行及时有效的早期火灾检测报警是关键。已有的火灾检测技术主要分为基于单一传感器信息的火灾检测和基于多传感器信息的火灾检测两大类[1]。Cheng C等人利用多种传感器分别获取火灾时温度、烟雾浓度、一氧化碳浓度信息,建立神经网络进行火灾检测[2];Luo R C等人提出一种改进自适应融合算法,融合气体、温度和紫外线等火灾物理特征进行火灾检测[3];Zervas E等人采用D-S证据理论融合3种传感器检测的火灾信息,推理判断火灾的发生概率[4];张鑫等人结合改进的主元分析法(PCA)、粗糙集(RS)理论、支持向量机(SVM)等3种方法对火灾探测系统在线和离线信息进行融合互补,提高火灾探测的可靠性和准确度[5];Zhang ZC等人根据Bayesian决策原理在火警预警系统中对火灾发生时烟雾、火焰和温度3个传感器信息进行融合[6];ROQUE G等人基于物联网技术,建立无线传感器网络,采集烟雾、气体和温度等火灾参量实现快速火灾探测[7];Baek J等人提出一种智能多传感器室内嵌入式实时火灾探测系统,该系统采用相似性匹配多信息融合方法,实现高精度的早期火灾检测[8];Sridhar P等人提出了一种基于高斯概率的阈值卷积神经网络(GTCNN)模型,融合温湿度、烟雾、红外火焰传感器信息和视频图像多特征信息实现高可靠的火灾检测[9]。可见,多传感器信息融合火灾检测方法是目前各国学者的主要研究方向,该方法重点是处理融合传感器获取的火灾信息,以得到准确的火灾检测结果。现有多传感器火灾检测方法融合的信息较少,降低了抗干扰能力,影响检测精度。同时现有多传感器融合算法大多过于复杂,不利于火灾的实时检测。有鉴于此,文章提出一种基于多传感器的火灾检测方法,基于模糊控制系统融合火焰红外信号、温度、烟雾浓度等3个火灾参量,有效提高了火灾检测的精度和鲁棒性。
1多传感器模糊融合系统原理
模糊系统是一种以模糊数学理论为基础的非线性智能推理系统,其提供了一种将基于专家知识的语言规则转化为精确数值解的方法,在解决具有多输入多输出、多参数、非线性的复杂系统的求解问题方面具有突出优势。基本模糊系统主要由模糊化接口、知识库、推理机、去模糊化接口等四个部分组成。在多传感器融合系统中,各传感器的测量对象往往各不相同,而由于传感器处于同一测量环境,所测量数据之间又有相互关联,因此难以建立精确的数学模型来实现多传感器融合应用。模糊系统不依赖应用对象的精确数学模型,同时结合了人的专家经验,具备更强的适应性和抗干扰能力,成为目前应用最多的多传感器融合方法之一。
对于一个多输入单输出的多传感器模糊融合系统,其组成结构如图1所示,其输入为多个传感器的测量数据。

图1 多传感器模糊融合系统组成结构
图1显示,模糊化接口是将输入的传感器测量数据转换为隶属度函数值;知识库提供输入模糊化和输出去模糊化所需的隶属度函数库,以及推理机所需的推理规则库,推理规则库需结合专家知识或操作人员经验制定,并使用人的推理语言进行表述,是决定模糊融合系统性能的关键部分;推理机根据输入模糊量和推理规则库,模拟人的决策过程进行推理决策,获得多传感器融合模糊输出值;去模糊化是基于输出隶属度函数将模糊输出值转换为实际应用所需的清晰化值。
2火灾检测多传感器模糊融合系统设计
燃烧是火灾最重要表现形式之一,其过程将伴随着各种物理和化学的变化。大多数的火灾检测就是检测环境中火灾燃烧而引起的特征量变化,常见的火灾特征参量包括紫外线、红外线、温度、烟雾、气体等。传统通过单一传感器采集的环境参量来判断火灾发生与否容易出现误判,通过模糊融合多传感器的多种信息,综合考虑不同空间和时间上的互补、冗余信息,可以大大提高火灾检测的准确性。文章火灾检测多传感器模糊融合系统的设计步骤如下:
(1)确定输入量与输出量。文章选取火焰红外信号F、温度T、烟雾浓度SC等3个火灾参量作为模糊融合系统的输入,并以火灾发生概率P作为模糊融合系统的输出。
(2)进行输入量的归一化处理。模糊融合系统的输入量在同一论域时才可以保证融合的准确性。由于不同参量使用的传感器规格各不相同,加上应用环境影响的差异,输入量一般具有不同的论域,因此需对传感器采集到的火灾参量进行归一化处理来保证不同输入量论域的统一性。
(3)对输入量和输出量进行模糊化。模糊化是将输入或输出变量的精确值转化为给定论域上的模糊子集。变量模糊化首先要确定变量不同状态的变化范围,即把相应论域划分为若干区间,进而确定模糊化等级。文章将输入量、输出量的模糊化等级划分如下:
①输入量:火焰红外信号F的不同状态划分为2级:有(y)、无(n);温度T的不同状态划分为3级:室温(rts)、略高于室温(rtm)、远高于室温(rtl);烟雾浓度SC的不同状态划分为3级:大(l)、中(m)、小(s)。
②输出量:火灾概率FP的不同状态划分为3级:可能(pm)、极有可能(pl)、一定会(pa)。
模糊化还需要建立变量的隶属度函数。设给定论域U和U到[0,1]的任一映射μA:U→[0,1],则μA确定U的一个模糊子集,μA为A的隶属度函数。由于高斯型隶属度函数更符合人们的期望,光滑性较好,故文章选用高斯型隶属度函数对温度、烟雾浓度进行模糊化,以及对火灾概率进行模糊化,而火焰红外信号只能判断火焰有无,故采用三角形隶属度函数对其进行模糊化。
高斯隶属度函数的表达式为:
(1)
式(1)中:x为归一化后的温度、烟雾等火灾参量值或火灾概率值,a决定函数曲线的宽度,c决定函数曲线的中心。
三角形隶属度函数的表达式为
(2)
式(2)中:e、h、g为正的常数。
文章取a=0.2,温度rts、rtm、rtl对应的c值分别取0、0.5和、1。烟雾浓度s、m、l对应的c值分别取0.2、0.5和0.2。e=h=g=0和e=h=g=1分别对应火焰红外信号的2个模糊化状态。输出概率pm、pl、pa对应的c值分别取0.1、0.7和1。温度、烟雾浓度、火焰红外信号和火灾概率对应的隶属度曲线分别如图2、图3、图4和图5所示。
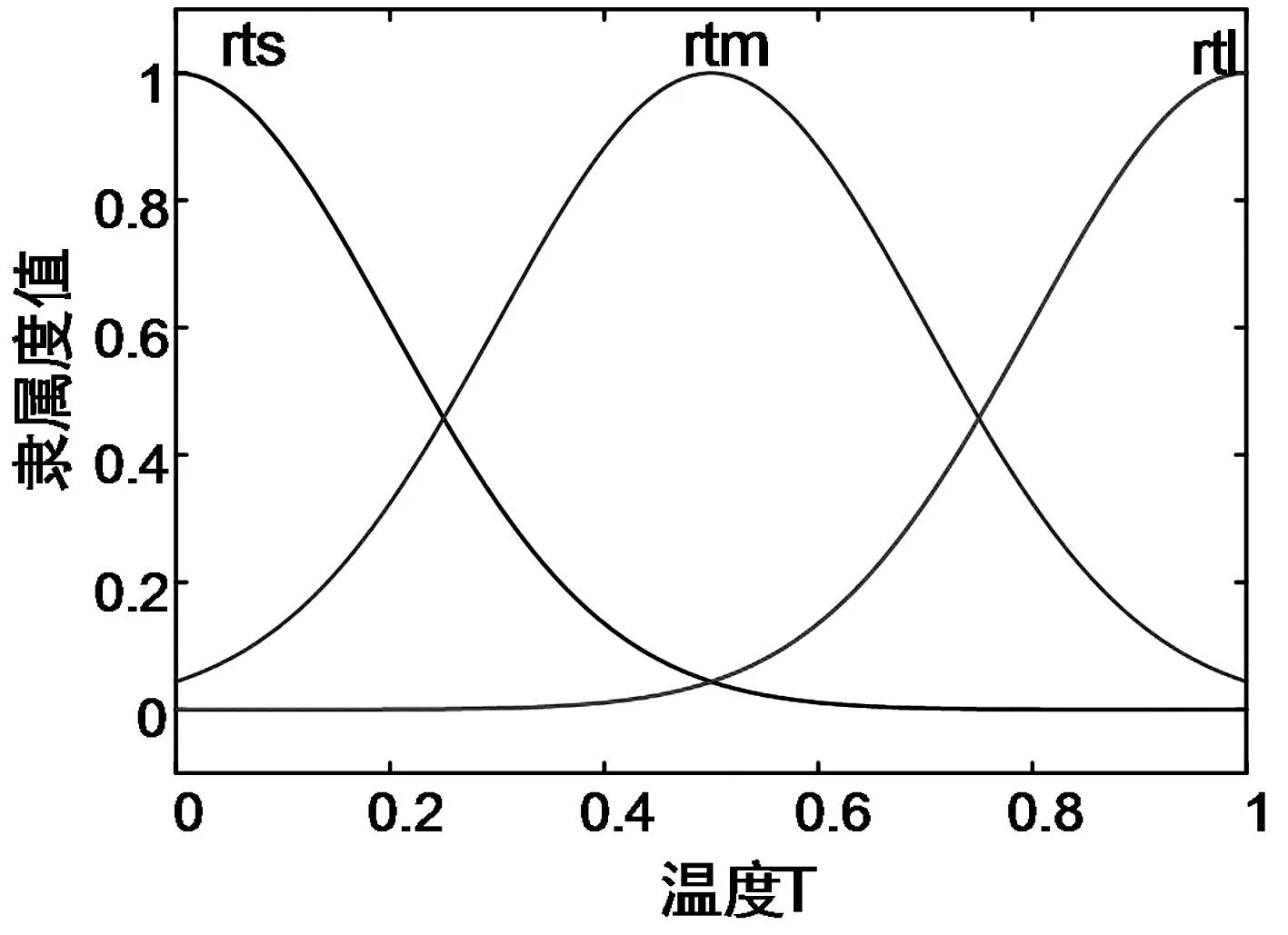
图2 温度的隶属度

图3 烟雾浓度的隶属度

图4 火焰红外信号的隶属度
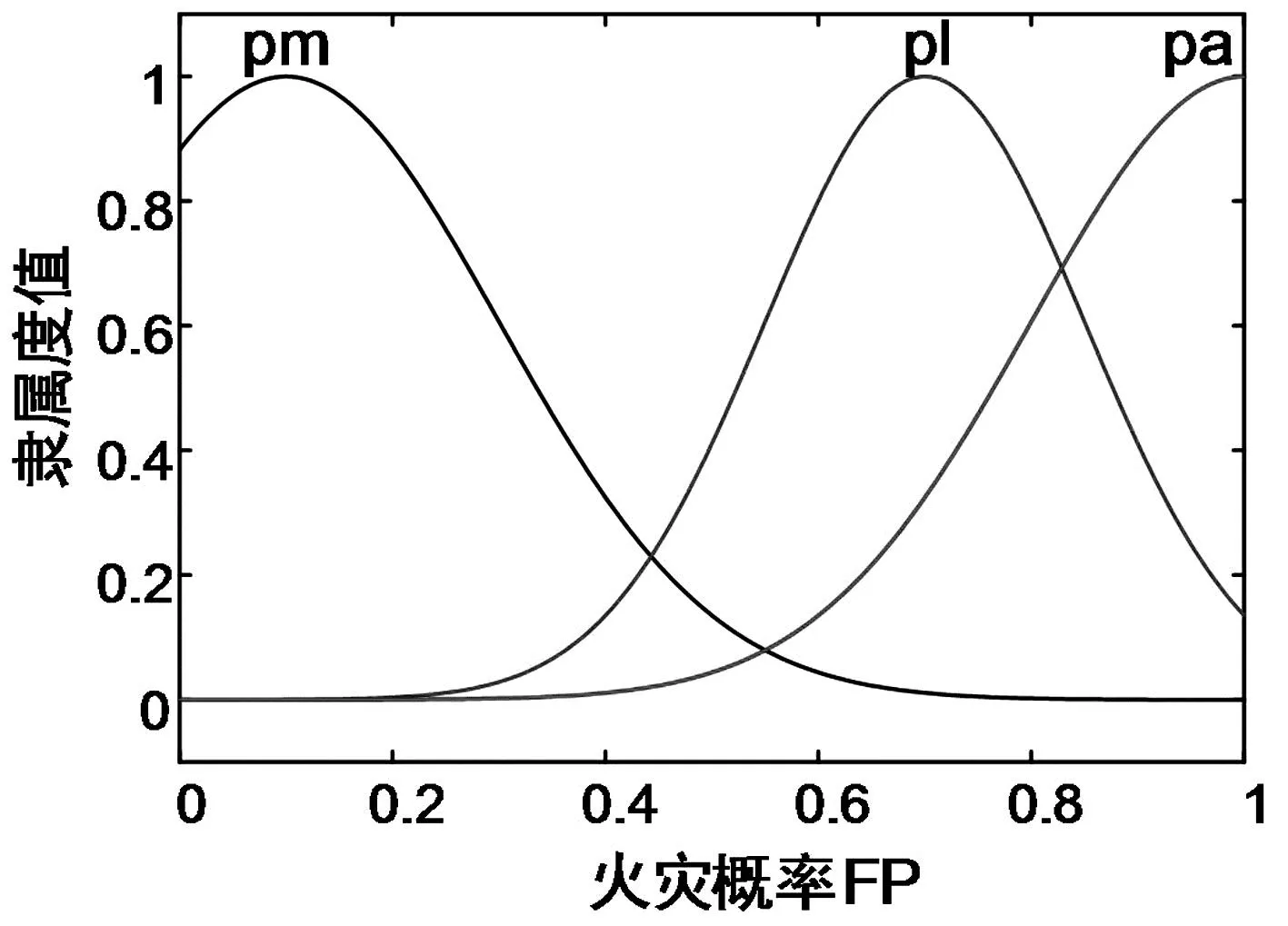
图5 火灾概率的隶属度
(4)建立模糊规则库。模糊规则库是模糊融合系统推理的依据。文章按照以下原则进行模糊推理规则设计:①将火灾参量优先级设定为:火焰信号>温度>烟雾浓度;②火灾参量的每一种输入状态都有一条规则与其对应;③当规则中出现火焰红外信号有无对推理结论没有影响的情况,将火焰红外信号有无两条规则合并为一条规则,减少规则复杂度,来提高规则库鲁棒性和运行效率。
文章推理规则描述采用“R:if A and B and C then D”的结构形式,其中A、B、C为不同论域上的模糊子集,R为根据人工经验制定的决策规则,D为输出模糊子集,文章模糊规则库的具体规则为:
R1:If (T is rtl)and (SC is l)and (F is y)then (FP is pa);
R2:If (T is rtl)and (SC is l)and (F is n)then (FP is pl);
R3:If (T is rtl)and (SC is m)and (F is y)then (FP is pa);
R4:If (T is rtl)and (SC is m)and (F is n)then (FP is pl);
R5:If (T is rtl)and (SC is s)and (F is y)then (FP is pl);
R6:If (T is rtl)and (SC is s)and (F is n)then (FP is pm);
R7:If (T is rtm)and (SC is l)and (F is y)then (FP is pa);
R8:If (T is rtm)and (SC is l)and (F is n)then (FP is pl);
R9:If (T is rtm)and (SC is m)then (FP is pl);
R10:If (T is rtm)and (SC is s)and (F is y)then (FP is pl);
R11:If (T is rtm)and (SC is s)and (F is n)then (FP is pm);
R12:If (T is rts)and (SC is l)and (F is y)then (FP is pl);
R13:If (T is rts)and (SC is l)and (F is n)then (FP is pm);
R14:If (T is rts)and (SC is m)and (F is y)then (FP is pl);
R15:If (T is rts)and (SC is m)and (F is n)then (FP is pm);
R16:If (T is rts)and (SC is s)then (FP is pm)。
对于推理机的输出模糊值,文章采用“与”逻辑,选择较小数作为去模糊化的隶属度值。
(5)去模糊化。模糊融合系统通过去模糊化处理可获得用于判断火灾发生与否的火灾概率值。文章采用加权平均法对输出模糊子集进行去模糊化,该方法的表达式为:
(3)
式(3)中:η0为去模糊化后的输出值,pi为输出模糊子集的元素,μ(i)为元素对应的隶属度值。
3实验
搭建如图6所示的火灾检测系统对文章多传感器融合火灾检测算法进行实验验证。该系统硬件包含火灾检测传感器、数据采集器和上位机等,数据采集器以单片机为控制核心,分别使用红外火焰检测传感器、MQ-2传感器、DS18B20数字温度传感器对火灾时的火焰信号、烟雾浓度、温度等火灾参量进行采集。红外火焰检测传感器可检测火焰的红外波段,检测结果以IO数字量输出给数据采集器。MQ-2传感器可检测空气中烟雾的浓度,量程范围为10000ppm以内,通过SPI总线与数据采集器进行数据交互。DS18B20数字温度传感器的测量范围为-55℃~+125℃,通过单线总线与数据采集器进行数据交互。数据采集器采集的数据再通过485总线发送至上位机,在Matlab软件环境下构建上位机程序,多传感器模糊融合火灾检测算法运行于上位机,最终得到火灾概率。
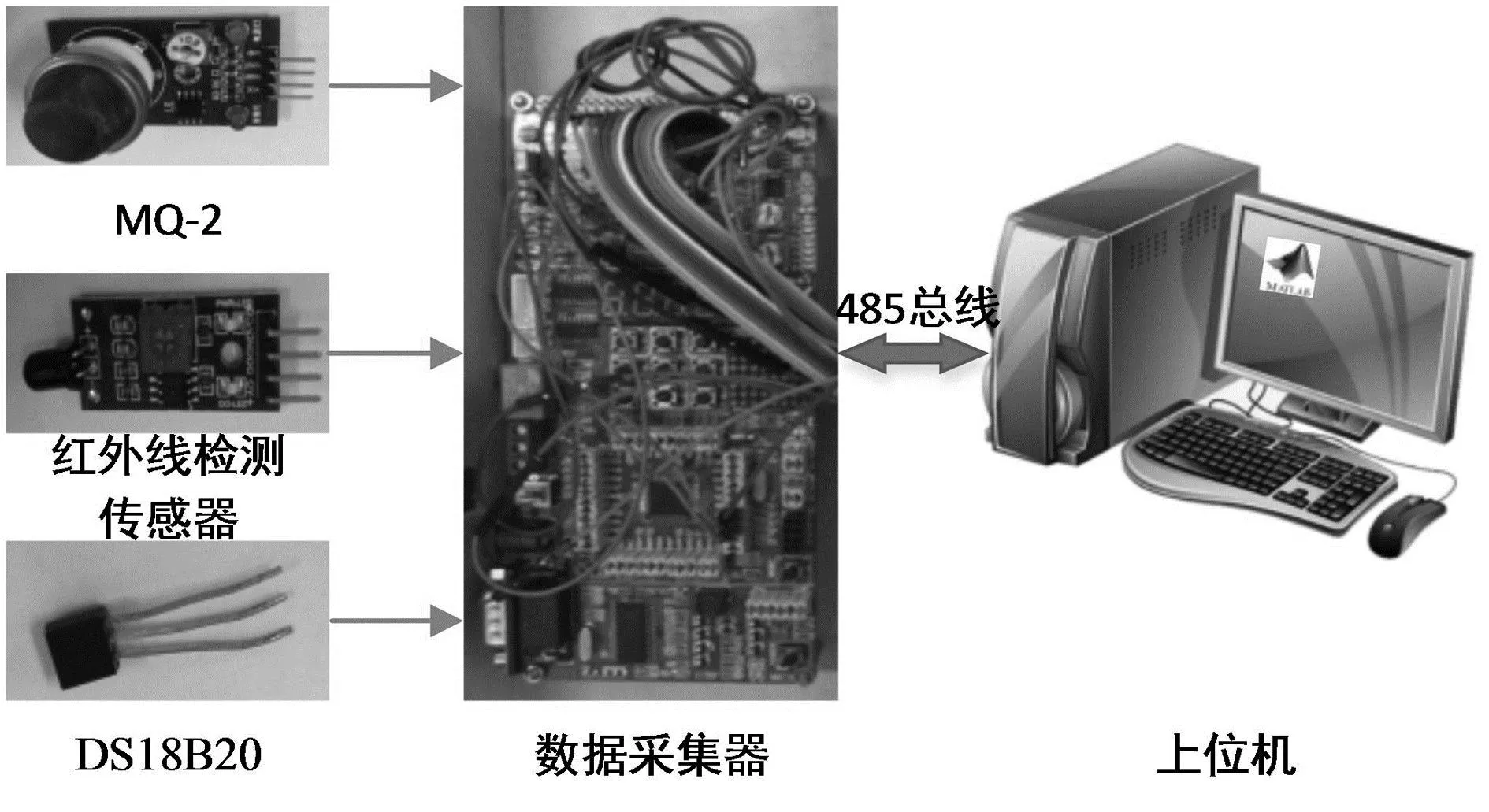
图6 火灾检测系统
通过调用Matlab串行通信库函数实现与数据采集器的485总线实时通信交互,使用Matlab模糊控制工具箱设计文章模糊融合系统,并生成FIS文件,如图7所示。上位机通过调用FIS文件实现多传感器模糊融合计算。
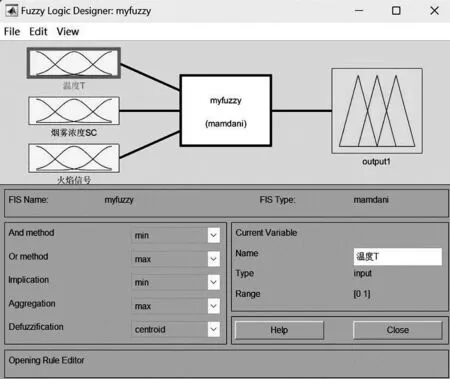
(a)输入输出模糊化配置
该实验在室内环境下进行,如图8所示。在固定点点燃面积约为500cm2的火堆,燃烧物为普通A4打印纸,进行火灾检测实验。

图8 火灾检测实验环境
上位机对火灾代表性阶段的数据进行采集和记录,数据如表1所示。由表1可以看出,受室内环境和火堆大小限制,温度和火焰信号变化较为明显,而烟雾浓度变化不大。上位机对采集数据进行归一化,然后按照文章算法进行火灾检测多传感器模糊融合,当火灾概率大于0.5时,则判别为发生火灾,检测结果如表2所示。

表1 火灾代表性阶段的数据

表2 火灾检测结果
由表2可以看出,发生火灾与未发生火灾的火灾概率差异明显,容易确定发生火灾的火灾概率阈值,而在室内环境烟雾浓度不明显的情况下,文章算法仍能够进行准确的火灾检测,有效避免使用单一传感器信息时出现的误判,提高了火灾检测的准确性。
4结语
文章提出的基于多传感器模糊融合的火灾检测方法,选取3个火灾发生时的典型参量:红外火焰信号、温度、烟雾浓度,仅使用16条推理规则,通过融合多传感器信息提高了火灾检测的实时性和鲁棒性。构建了火灾检测系统对算法进行实验验证,实验结果表明文章算法可以实现准确火灾检测,具备实际应用价值。
猜你喜欢
厦门大学学报(自然科学版)(2022年4期)2022-07-15
音乐天地(音乐创作版)(2022年1期)2022-04-26
小学阅读指南·低年级版(2021年3期)2021-03-19
学苑创造·A版(2021年2期)2021-03-11
现代装饰(2020年7期)2020-07-27
运筹与管理(2019年10期)2019-12-17
华人时刊(2019年13期)2019-11-26
动漫星空(兴趣百科)(2019年5期)2019-05-11
当代陕西(2017年12期)2018-01-19
学与玩(2017年6期)2017-02-16