大型民航客机油门装置驱动控制设计*
2024-01-02 11:23:52杨家兴陈永琴苏三买
电子机械工程 2023年6期
杨家兴,陈永琴,苏三买,李 仪
(1.西安电子科技大学机电工程学院,陕西 西安 710071;2.西北工业大学动力与能源学院,陕西西安 710072)
引 言
现代大型民航客机上,油门装置是油门控制系统的重要操纵装置,用于发动机推力控制。油门装置是一套可同时实现手动操作和自动操作(在油门伺服电机驱动下使油门杆转动)的机械电子装置。
飞机自动飞行时,飞行控制系统将飞机所需的推力转换为油门杆角度指令并产生一个油门驱动信号以驱动油门装置的伺服电机,从而使油门装置带动油门杆转动相应的角度。
为了将油门杆转动时的物理角度变化转换为发动机电子控制器(Electronic Engine Control,EEC)可接收的电信号,在油门装置中设置有油门角度解算器。该解算器通常为与油门杆通过连杆连接的旋转可变差动变压器(Rotary Variable Differential Transformer,RVDT)型角度传感器,其将油门杆物理角度转换为一个表征角位移的解算器角度电信号,并通过硬件接口直接传送到EEC用于发动机推力控制。
随着技术的发展,先进大型民航客机实现的自动飞行功能也越来越多,例如飞行过程中的姿态保持、高度保持、高度层改变、垂直导航、水平导航、航向/航迹保持等,而对油门的良好控制是这些的基础[1]。
飞行控制系统发出油门角度控制指令后,油门装置是否实现实际油门旋转角度与指令角度的一致性,直接影响飞机飞行控制品质。在油门控制系统设计中,非常重要的技术要求是保证油门杆角度的快速与准确控制[2]。
油门控制系统在大型民航客机上应用广泛,国内外相关理论研究文献较多,主要为基于油门的飞行控制研究。文献[3]对某喷气式商用飞机的油门装置进行了系统化建模和仿真分析。文献[4]设计了一种自动油门控制系统的模糊比例积分微分(Proportional Integral Derivative, PID)控制器。文献[5]分析了飞机自动油门的工作模式以及控制律算法。文献[6]介绍了某型民用飞机的自动油门控制系统的组成、原理和工作模式。文献[7]应用双冗余技术和故障检测算法设计了油门控制系统。文献[8]针对民用飞机控制律优化设计,提出了一种适用于控制律设计和飞行员在环评估飞行品质的试验方案。文献[9]研究了飞机自动推力系统的基本原理、与其他系统之间的关联以及自动油门工作基本原理和逻辑设计。文献[10]进行了油门台设计。
在飞行控制系统中,油门控制类似于飞行姿态控制的升降舵与方向舵控制,属于发动机控制的执行机构。从自动控制原理的角度来看,飞机对发动机推力的控制属于控制外环,而作为发动机推力控制中介的油门角度控制属于控制内环。现有研究文献多为基于自动油门的推力控制,也即上述的外环控制,而对油门装置中油门角度本身的驱动控制研究较少。
近年来,我国设计的大型客机的油门装置采用国外成套产品,关于油门装置的驱动控制设计及理论研究开展得不多,制约了设计能力及自主知识产权的提升。基于上述背景,本文开展了油门装置的结构分析,并进行了油门装置驱动控制设计与仿真研究。
1 油门装置结构分析
油门装置是飞机自动油门系统与发动机控制系统的中介装置,位于飞机驾驶舱的中央操作台。以B737飞机为例,油门装置在驾驶舱的位置如图1所示,其中的油门杆(包括正推力杆和反推力杆)实物如图2所示。整个油门装置实物如图3所示。

图1 油门装置在驾驶舱操纵台上的位置

图3 油门装置实物
现代大型客机通常安装两台或以上的发动机,为了实现双发同步控制并同时实现驾驶员手动推动油门杆和自动飞行时对油门驱动,图3所示的油门装置在结构上包含两套相同的传动装置,主要包括推力连杆、油门伺服电机、摩擦离合器和油门角度解算器,其工作原理如图4所示。
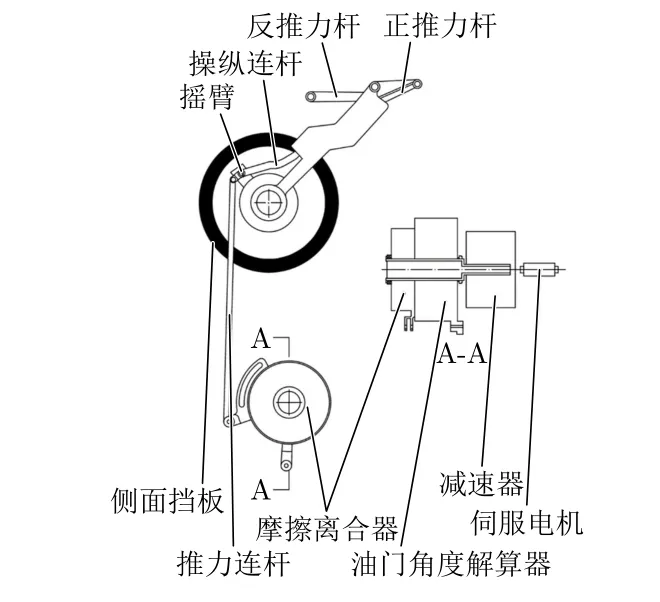
图4 油门装置工作原理图
伺服电机与减速器连接,减速器的输出连接油门角度解算器和摩擦离合器,然后通过位于离合器外壳的耳柄以铰链方式与推力连杆连接,实现与油门杆(正、反推力杆)联动。
在自动飞行模式下,飞行控制系统根据飞机推力需求产生油门杆角度指令并发送给伺服电机,驱动油门杆转动到目标角度。在手动模式下,摩擦离合器切断油门伺服电机的控制输入,油门杆在手动推动下带动油门角度解算器旋转。
2 油门装置驱动控制设计
油门伺服电机是油门装置的动力源,决定了油门杆的旋转速度和角度。对油门装置的驱动控制的核心是飞机自动飞行模式下对该伺服电机的控制。
大型客机油门装置伺服电机通常使用三相直流无刷(Brushless Direct Current, BLDC)电机[11],结构上主要包括定子、转子和位置传感器。BLDC电机通过位置传感器实时检测转子的位置,再根据此位置给定子绕组的不同相输入对应的电流,使定子产生方向均匀变化的旋转磁场。该旋转磁场与转子上永磁体的磁场相互作用产生与定子旋转磁场相同的电磁转矩输出,从而驱动电机旋转。
BLDC电机最常用的控制方法是矢量控制技术,其基本思想是:通过坐标变换和转子磁场定向,将电机定子电流矢量分解成直轴励磁电流分量id和交轴转矩电流分量iq两个分量,二者相互垂直正交,互不影响,以此实现BLDC电机的解耦控制。BLDC电机通过控制id来控制励磁大小,通过控制iq来控制转矩大小,从而获得与直流电机类似的控制性能[12]。针对油门装置高精度、低负载的要求,采用id为0的控制方法来控制电机。通过霍尔装置检测相电流,进行电机内部的电流闭环控制;通过磁编码器检测电机角速度,进行电机速度闭环控制;通过RVDT检测油门杆角度,进行电机位置闭环控制。基于该方法的油门装置驱动控制回路原理如图5所示。驱动及控制硬件的核心采用TMS320系列数字信号处理器,硬件原理框图如图6所示。
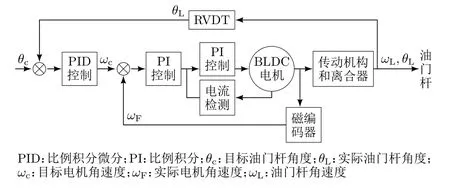
图5 油门装置驱动控制回路原理图

图6 油门装置驱动及控制硬件原理框图
3 油门装置的数学模型
油门装置在结构上包括BLDC电机和传动机构,建立油门装置的数学模型是进行油门角度闭环控制设计的基础。
3.1 BLDC电机数学模型
为便于分析,做如下假设:不考虑定子齿槽的影响,不考虑摩擦,定子三相绕组分布均匀且完全对称。则BLDC电机三相电压方程为:
式中:下标A,B,C表示三相;u为相电压;R为相电阻;i为相电流;L为绕组自感;M为绕组互感;t为时间;e为相感应电动势;UN为三相绕组中心点电压。
电机的电磁转矩可以表示为:
式中:p为电机极对数;ω为电机电气角速度。电机的拖动方程为:
式中:TL为负载转矩;J为转子转动惯量。
BLDC电机的相感应电动势波形为梯形时,采用三相对称、互差120°的方波供电,稳态下电机的电磁转矩可以表示为:
式中:E为相感应电动势幅值;I为相电流幅值;Ψm为最大磁链。选定电机型号,则Ψm为常数,电机的输出电磁转矩与I成正比。
3.2 油门角度解算器及传动机构数学模型
油门装置需将油门杆旋转的物理角度转换为EEC可接收的电信号,通常采用RVDT型角度传感器来实现,也称为油门角度解算器,其工作原理如图7所示,内部含有两个次级线圈和一个可旋转的初级线圈。EEC为初级线圈提供励磁电压,当初级线圈在油门杆带动下转动时,两个次级线圈因磁场的变化产生不同的感应电压V1和V2并输入到EEC,每组电压值都对应不同的旋转角度,从而实现油门杆物理角度向解算器角度电信号的转换。
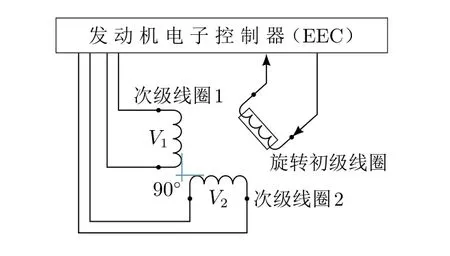
图7 油门角度解算器工作原理
在油门装置中,为了提高油门伺服电机的角度控制精度,伺服电机与解算器之间设置有齿轮及蜗轮蜗杆传动系统,其传动原理如图8所示。结合图4可知,油门角度解算器输出的角度与油门杆转动的角度并不相同,但传动机构确定,因此油门杆角度或油门伺服电机旋转角度与解算器输出角度满足确定的代数关系。

图8 油门电机到角度解算器的传动关系
根据机械传动关系(图4与图8),经推导可得油门杆角度θ1与解算器输出角度θ2近似为线性关系:
式中,k1为传动机构传动比。伺服电机旋转角度θ3与θ2的关系为:
式中:i1为直齿轮减速比;i2为蜗轮蜗杆减速比。
4 油门装置角度闭环系统设计与仿真
考虑油门杆到伺服电机的传动关系,综合式(3)到式(6),得到油门杆的速度响应传递函数:
式中,s为拉普拉斯算子。
在图5所示的油门装置驱动控制回路中,采用油门角度解算器和磁编码器的输出分别作为电机闭环控制的反馈位移和速度信号,由电机内部的电流环和外部的速度环、位置环构成三闭环控制系统,按照式(7)模型,采用PID控制方法在Simulink下设计控制器,如图9所示。
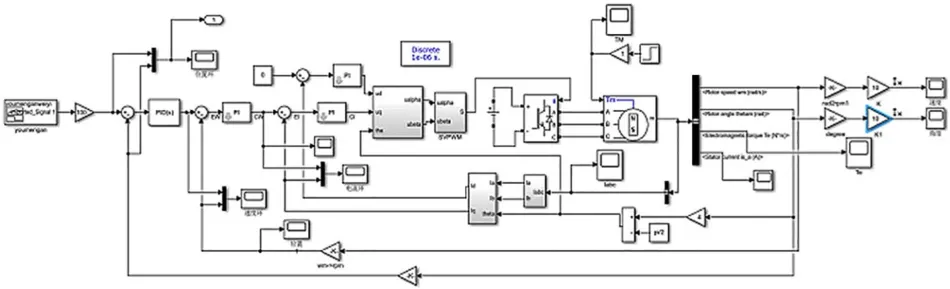
图9 油门装置驱动控制Simulink模型
在图9所示模型中,参考波音737手册[13],以图10曲线所示的角度信号作为油门装置位置的期望变化曲线,并以此作为输入进行油门装置驱动控制仿真。

图10 油门杆目标角度
设置仿真时间为2 s,在0.5 s时开始对该系统施加3 N·m负载,位置环和速度环的目标值与反馈值对比曲线见图11和图12。
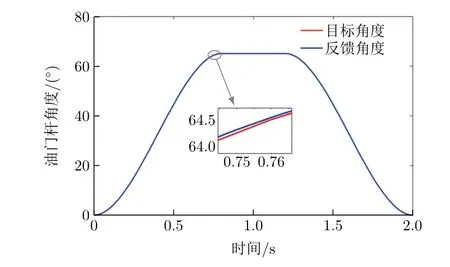
图11 位置环对比曲线
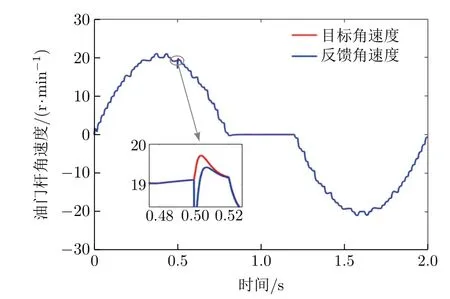
图12 速度环对比曲线
由图11和图12可知,位置环和速度环的跟踪性能良好,实现了油门杆位置的准确控制。在0.5 s时受到3 N·m负载,速度环中速度信号出现了略微波动,但随后很快就回复到正常值,说明该系统有较好的鲁棒性。
为了分析该控制系统的响应速度,以阶跃信号为输入对系统进行仿真分析,将仿真时间改为1 s,油门杆角度响应如图13所示。该控制系统的响应时间为0.01 s,响应快速。
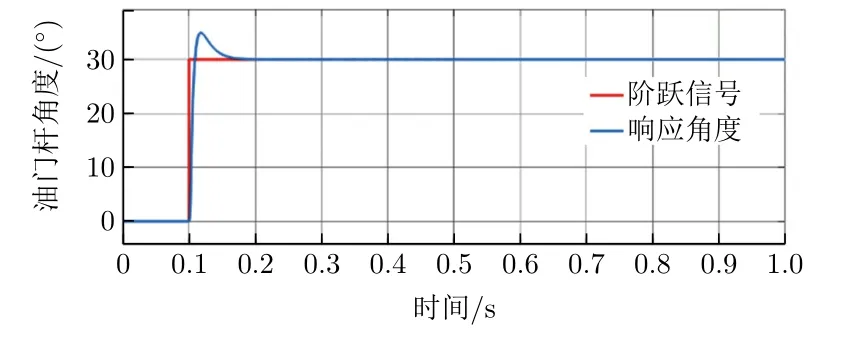
图13 油门杆阶跃信号角度响应
5 结束语
通过对油门装置的分析,开展油门装置驱动控制设计。以油门杆目标角度为闭环控制的期望输入,进行油门角度控制仿真,得到以下结论:
1)油门装置在结构上包括油门伺服电机、传动机构和油门角度解算器。
2)采用三闭环控制方法设计的油门角度控制器具有良好的控制性能,能够较好地对位置和速度信号进行跟踪,且响应速度快。
本文对油门装置驱动控制系统的分析与设计方法可为大型客机自动油门系统设计提供参考。
猜你喜欢
北京航空航天大学学报(2022年5期)2022-06-06 09:27:18
微特电机(2020年11期)2020-12-30 19:42:32
岷峨诗稿(2020年4期)2020-11-18 23:54:01
测控技术(2018年1期)2018-11-25 09:43:30
电子制作(2018年17期)2018-09-28 01:57:00
电子制作(2018年11期)2018-08-04 03:25:58
通信电源技术(2018年3期)2018-06-26 06:33:36
工业设计(2016年6期)2016-04-17 06:42:53
电测与仪表(2015年3期)2015-04-09 11:37:38
发明与创新·小学生(2013年8期)2013-04-29 00:44:03