
基于机器学习的智能垃圾分类系统设计分析
2023-12-31 00:00:00毛瑞坤罗晓萱郑欣
电脑迷 2023年16期
【摘" 要】 垃圾分类是目前我国环保工作的重要组成部分。我国作为人口大国,每日垃圾产生量非常庞大,而人工垃圾分类工作量大、难度大、效率低,难以满足目前我国垃圾分类的要求。基于此,文章提出一种基于机器学习的智能垃圾分类系统,该系统主控模块采用了STM32F103ZET6单片机,OpenMv4 H7摄像采集模块可以捕捉图片,根据BRISK特征提取算法检测垃圾图像,并通过语音模块播报识别信息,更好地服务于垃圾分类领域。
【关键词】 机器学习;垃圾分类;智能系统
我国作为人口大国,每年所产生的垃圾数量可达10亿吨以上,这些垃圾如果不能得到有效处理将会污染环境、威胁人们的身体健康。我国近年大力推动垃圾分类工作的实施,通过垃圾分类针对性处理生活垃圾,加强资源回收利用率。但从目前垃圾分类现状来看,依然存在一定的问题,传统垃圾主要由人工分类,具有工作流程烦琐、工作量大、效率低等问题。人工智能技术不断发展,也为垃圾分类工作提供了新的发展思路,但依然有可完善之处,如无法脱离网络使用、可靠性不足等。本研究提出基于机器学习的智能垃圾分类系统,通过图片检测、识别判定垃圾种类,旨在降低垃圾分类难度。
一、机器学习相关阐述
机器学习是一门多领域交叉的学科,包括统计学、概率学、逼近论、凸分析等多门学科。专业研究领域是通过计算机模拟人的思维或行动的一种学习行为,并在学习中不断提升或改善自身性能。算法的功能是通过求解最佳模型参数,在假设空间当中挑选出符合用户需求的模型。机器学习参数求解最终会转化为最优化问题,本研究所设计智能垃圾分类系统采用了BRISK算法。
BRISK算法是一种特征提取算法,也是一种二进制的特征描述算子,该算法具有良好的尺度不变性、旋转不变性、鲁棒性等优势,在图像配准应用中识别速度大于传统的FREAK、ORB等算法,特别是在模糊图像配准中表现更加出色。该算法利用FAST9-16进行特征点检测,想要解决尺度不变性,必须检测尺度空间的特征点,通过BRISK算法构建图像金字塔即可实现多尺度表达。
二、智能垃圾分类系统研究现状
随着移动设备终端不断发展以及机器学习方法的出现,机器学习已经逐渐被应用到各个领域。在智能垃圾分类中应用机器学习,实现自动化、智能化垃圾识别,提高了垃圾分类效率和精准度。一些学者通过收集垃圾信息并创建了垃圾图像数据集,算法选用了SVM、CNN识别垃圾,SVM算法和CNN算法的识别精准率分别为63%和22%,识别精度有待进一步提升,并且整个系统流程十分烦琐。为了简化流程,也有学者提出了智能废料分类系统,采用50层残差预训练卷积神经网络模型开采。为了提升模型预测性能,还有学者采用了RecycleNet模型,虽然该模型减少了垃圾参数量,但将垃圾识别精准度提升到了80%以上。如今,关于机器学习应用到垃圾分类中的研究有很多,也提出了多种设计模型和设计思路。但整体上将机器学习应用到垃圾分类上的研究依然不多,垃圾分类公开数据量较为局限。所以将机器学习与垃圾分类相融合,已经成为垃圾分类研究的重要趋势。
三、智能垃圾分类系统设计思路
本智能垃圾分类系统采用了物体识别技术,主要检测对象包括有害垃圾、可回收垃圾、厨余垃圾、其他垃圾。通过识别垃圾特征量,根据特征量参数判定垃圾的具体类型。本研究所设计的智能垃圾分类系统所采用的算法为BRISK算法。此外,该系统还采用了AGAST算法(角点检测算法),该算法作为FAST算法的优化改进算法,在图像计算中可以在平面上连续显示图像特征。因此在设计中可以构建尺度空间金字塔,通过AGAST算法检测角点,二次拟合连续尺度空间中测度相应函数值,抑制非极大值、提出非稳定极值点。通过抛物线拟合稳定极值参数,最终获取到连续尺度空间中定位精度的稳定极值点。
AGAST算法在BRISK算法体系内运行,主要负责特征点检测,而特征描述方面借助自动以邻域采样模式,也就是在特征点周围40个像素块中构建同心圆,圆周上均匀分布采样点,每个圆周设置60个采样点。在实际计算中,需要在描述BIRSK特征前完成预旋转工作,也就是中心点旋转采样模板的旋转角度,短距采样点集中对比采样点强度,形成512bits值特征,对值特征进行特征匹配,得出整个图像运动估计值。过去很多垃圾分类系统设计都是采用ORB算法,但存在可靠性低、检测精度低等限制。而BRISK算法通过构建连续尺度空间、预旋转作业,保证了被描述对象的尺度、旋转的不变性,更加适用于高精度图像匹配,可极大地提升垃圾分类精度。
四、智能垃圾分类系统整体架构
(一)整体框架
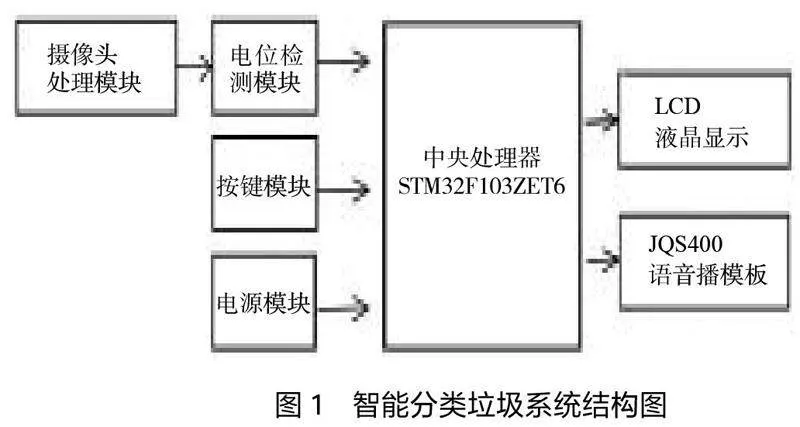
如图1所示,本系统主控模块采用了STM32F103ZET6单片机,OpenMv4 H7摄像采集模块可以捕捉图片,根据BRISK特征提取算法检测垃圾图像特征点,并将采集的垃圾图像特征与训练集对比分析,完善垃圾的整个检测过程,将检测结果上传给显示模块,通过文字显示垃圾具体种类,同时语音系统会播报垃圾信息。
(二)单片机选型
本垃圾分类系统选用了STM32F103ZET6单片机,其工作频率为72MHz。STM32F103ZET6单片机具有技术成熟、运算效率高、硬件配置高、外带接口总线等优势,特别是外部接口可以实现外部设备的连接和功能扩展,如连接FSMC驱动LCD,提升刷屏率。
(三)显示模块
本系统的显示模块采用了3.5寸TFTLCD,分别率为320*480。显示模块中的端口与MCU引脚对应连接,单片机通过数据传输、信息控制实现显示屏的信息显示与控制功能。MCU的PBO口连接BL并行串口,可以控制液晶屏背光亮度。单片机、显示屏共用复位信号电路,单片机的FSMC总线连接显示屏总线接口,从而提升显示屏的清晰度和刷新率。
(四)语音模块
语音模块采用了JQ8400,通过将语音模块与单片机连接(I/O通信系统),可根据图像检测结果输出语音播报信息。在语音模块中存入垃圾分类的MP3文件,包括有害垃圾、可回收垃圾、厨余垃圾、其他垃圾。JQ8400语音模块采用了SOC设计方案,集成度非常高,包含了16位MCU、音频解码的ADSP,通过硬解码方案提升播报音质和播报稳定性。本次设计中只在JQ8400语音模块中存入了4个MP3文件,因此暂时只应用到ONE LINE串口进行控制。
(五)图像采集模块
本系统采用了OpenMv4 H7摄像采集模块,搭载了STM32H743II ARM Corlex-M7处理器,其运行频率可达480MHz,RAM和Flash分别为1MB、2MB。I/O引脚采用标准化输出,均为3.3V。在获取图像方面,该摄像头同时具备图像采集、图像处理多种功能,借助Python脚本即可识别所采集图像的形状、颜色、特征等信息,从而实现追踪功能。
五、智能垃圾分类系统设计
(一)训练集
机器学习需要有大量的资源作为支撑,因此设计前期需要拍摄多张垃圾图片,采用特征提取法提取垃圾图像特征反复训练,整个训练过程类似于人们判断垃圾种类的过程,将垃圾与参照物对比分析判定其可信度。本研究所提出的智能垃圾分类系统中,采用了4个样本,包括易拉罐、干电池、大蒜、医用棉签,每个样本从不同角度拍摄100张照片进行训练。
(二)硬件连接
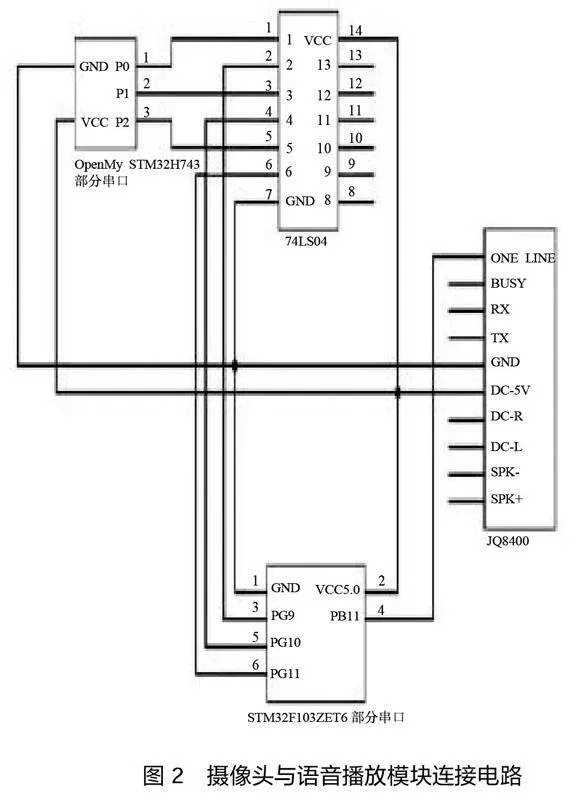
所选单片机上没有配备专门的摄像头通信接口,本系统采用独立的OpenMv4 H7摄像头,通过端口电位检测法进行物体识别。如图2所示,设计中采用了3个检测端口(P0、P1、P2),每个端口均配备4种电位组合来匹配4种垃圾(有害垃圾、可回收垃圾、厨余垃圾、其他垃圾)。使用编程软件(OpenMv)设置每个端口的垃圾识别信号,可回收垃圾电位信号输出为P0=1、P1=0、P2=0,有害垃圾电位信号输出为P0=0、P1=1、P2=0,厨余垃圾电位信号输出为P0=0、P1=1、P2=1,其他垃圾电位信号输出为P0=1、P1=1、P2=0。单片机采用的检测端口分别为PG0、PG1、PG2,在硬件设置过程中需要将端口一一对应连接。语音模块中,单片机PB信号由ONE LINE端口接收,设置过程中一一对应连接线路即可实现语音模块功能。
(三)功能实现
在硬件操作中,在指定位置安装摄像头,将所有设备接通电源,程序初始化后,摄像头即进入到垃圾检测状态。在采集垃圾信号、分析垃圾信号后,将垃圾框选出来进行提示,所识别的垃圾在处理系统中通过P0、P1、P2端口的电位组合,单片机通过PG0、PG1、PG3端口测定端口电位,通过电位信息组合即可呈现出相应的垃圾种类。如所检测的物体为大蒜,代表厨余垃圾,则电位信号输出为P0=0、P1=1、P2=1,电位检测完毕后唤醒语音模块,并播放P0=0、P1=1、P2=1所应对的“厨余垃圾”MP3文件,完成垃圾分类提醒。
(四)功能测试
本次设计的智能垃圾分类系统的核心功能是垃圾智能识别。在完成系统设计后使用易拉罐、干电池、大蒜、医用棉签4个样本进行检测,对这4个样本分别展开100次检测,其中干电池检测为“有害垃圾”98次、“可回收垃圾”1次、“其他垃圾”1次;大蒜检测为“有害垃圾”1次、“厨余垃圾”99次;易拉罐检测为“可回收垃圾”98次、“可回收垃圾”1次、“厨余垃圾”1次、“其他垃圾”1次;医用棉签检测为“有害垃圾”1次、“其他垃圾”98次、“厨余垃圾”1次。整体来看,本设计方案垃圾分类正确率可达98%以上,并且系统运行较为稳定、可靠性强,可以较好地完成垃圾分类工作。
六、结语
综上所述,本研究针对城市居民垃圾采用了机器学习设计智能垃圾分类系统,借助AGAST算法提取垃圾特征,实现了城市垃圾的智能分类。本设计系统操作便捷,适用于绝大部分人群使用。通过测试,对城市生活垃圾正确识别率达到98%以上,实现了可以在现实应用的垃圾分类功能。
参考文献:
[1] 潘丽,贾冕茜. 基于机器学习的智能垃圾分类系统设计[J]. 西昌学院学报:自然科学版,2022(02):36-37.
[2] 卫昱含,杨志锟,吴海伦,等. 基于互联网技术的智能垃圾分类系统的设计——以“趣分类”App为例[J]. 信息记录材料,2021(11):177-179.
[3] 江辉. 基于RFID的智能垃圾分类系统的设计与实施[J]. 安徽电子信息职业技术学院学报,2018,17(04):403-404.
[4] 张怀予. 基于物联网和图像识别的垃圾分类回收系统[A]//中国通信学会,中国电子学会. 物联网与无线通信论文集[C].2018:155-156.
[5] 范松,陈坤,朱峰,等. 智能垃圾分类回收系统的研究与设计[J]. 数码世界,2019(04):265-266.
