基于集成三端口的混合微网场景自适应功率协同控制策略
2023-12-30 03:17:44李占凯邴绍洋张福民檀世豪何国杰曹智勇
南方电网技术 2023年11期
李占凯,邴绍洋,张福民,檀世豪,何国杰,曹智勇
(1.河北省电磁场与电器可靠性重点实验室(河北工业大学),天津 300401;2.省部共建电工装备可靠性与智能化国家重点实验室(河北工业大学),天津 300401)
0 引言
随着传统化石能源的日渐枯竭与环境问题的日益严峻,对于清洁能源的需求不断凸显。风能、太阳能等分布式电源(distributed generations,DGs)得到广泛利用,而微电网作为一种有效消纳本地分布式电源的电网结构受到广泛关注。微网[1-2]作为一个整体既可以与大电网并网运行也可以在大电网发生故障时以离网状态独立运行,实现对网内负荷持续供电。根据母线供电电压的类型,微电网可分为3 类[3-5]:交流微电网、直流微电网与交直流混合微电网。
与传统单子网结构的微网相比,混合微网的网络拓扑更为复杂。互联接口变换器[6-7](interlinking converter,ILC)是混合微网在拓扑结构上明显区别于单子网结构微网的标志,其作为混合微网的关键设备起到子网间功率传递和必要时子网电压/频率支撑的作用[8-9]。特别在混合微网处于离网孤岛运行状态下时,互联接口变换器的作用尤为显著。
混合微网除了具有复杂拓扑结构外也需要合理的控制策略以维持其稳定安全运行。根据对通信依赖程度可将微网控制框架分为3 类:集中式[10-12]、分布式[13-15]、分散式[16-19]。基于中央通信的方法通过高带宽通信网络进行微网内海量信息交换可实现需求响应、减载和能量管理。然而,该方式存在单点故障问题和显著的计算负担。随着微网规模的扩大,计算复杂度呈指数增长,这很大程度上限制了系统规模并降低了系统可靠性。为避免集中式控制的缺点,克服集中式通信的弊端,提出了分布式通信方法,在此方式下代理间自主协作以实现全局控制目标。但信息共享需要紧密的邻近通信网络,因此通信延迟、丢包和故障等问题都降低了系统的可靠性与稳定性。
目前,对混合微网分散式控制方式的研究越来越多,该方式提供了一种无需通信链路即可实现复杂微电网的良好管理的解决方案。文献[16-17]针对混合微网提出了一种分散式自治功率共享策略。该策略利用交流母线频率与直流母线电压的偏差,通过将交流侧频率与直流侧电压分别归一化来实现网间功率互济。文献[19]提出了一种分散的多时间尺度的功率控制策略,可使互联子网在源荷波动下协调运行、相互支持。
此外,为解决可再生能源的波动性、间歇性的问题,储能(energy storage system,ESS)作为一种有效手段被引入到混合微网中[16,20]。文献[21]提出了一种具有中央储能系统的交直流混合微网结构,根据此结构提出了一种中央储能和互联变流器之间的协调控制策略。文献[22]在考虑直流子网中恒功率负载的影响后,提出一种改进下垂控制。同时结合集中储能控制,实现孤岛运行的混合微网群的协调控制。文献[23]提出了一种AC/DC/DS 的混合微网结构,并设计了一套分散式控制策略,实现对混合微网的分层控制。
混合微网不同于常规单子网结构微网,存在网间功率耦合,任意子网内源荷大幅波动都会影响混合微网整体运行。为保障混合微网的平稳运行,对其进行合理功率控制就显得尤为重要。此外,微网并网运行时电压、频率由大电网支撑,控制相对简单,故本文重点研究离网状态下混合微网的功率控制。针对上述问题,本文设计了一种基于集成三端口的混合微网功率分散式协同控制策略,其包含3种底层控制策略,分别为子网内功率平衡策略、子网间功率互济策略与考虑储能荷电状态(state of charge,SOC)的改进下垂控制策略。此外,为应对微网不同运行状态下的功率需求,设计了一种微网运行场景自适应的功率分段控制策略。在该策略的调度下可实现上述3 种针对子网级控制策略的协调控制,保证微网的可靠稳定运行。
1 混合微电网拓扑结构及调制原理
1.1 交直流混合微电网拓扑结构
图1为传统三端口拓扑结构图。

图1 传统三端口拓扑结构图Fig.1 Traditional three-port topology structure
图2 为基于集成三端口拓扑的混合微网的拓扑结构图[25],该拓扑结构在一种传统三端口基础上进行模块化设计。与图1 相比,图2 每相桥臂的上中两个开关组成图1 中的双向AC/DC 换流器(bidirectional AC/DC converter,BADC)连接交流微网与储能公共母线。图2 中A 相桥臂的中、下两个开关作为图1 中的双向DC/DC 换流器(bidirectional DC/DC converter,BDDC)连接直流微网与储能公共母线。图2 中B、C 两相桥臂的中、下开关对应于图1 中的储能BDDC,负责对储能单元的控制。图2 共包含4 个端口,分别为一个交流端口和3 个直流端口。BADC 和BDDC 一起构成互联交流子网和直流子网的两级式互联变换器(interlinking converter,ILC)。储能BDDC 灵活控制储能单元的充放电。通过适当的控制策略可以使BADC 与BDDC、储能BDDC 共用每相桥臂的中间开关。与传统三端口相比,集成三端口提升了开关的利用率,节省了成本,实现了紧凑的模块化设计。

图2 集成三端口拓扑结构图Fig.2 Topology structure diagram of integrated three-port
图3为单相桥臂拓扑结构图。

图3 单相桥臂拓扑结构图Fig.3 Topology structure diagram of single-phase bridge arm
1.2 集成三端口调制原理
根据1.1 节图2 可知,集成三端口共包含3 个桥臂,每个桥臂各包含3 个开关。从1.1 节图3 可知,单相桥臂两个端口可以配置为直流或交流端口。本文中每相桥臂配有一个交流端口和一个直流端口,下面以一相桥臂为例说明集成三端口的调制原理。表1为每相桥臂上开关的动作逻辑。
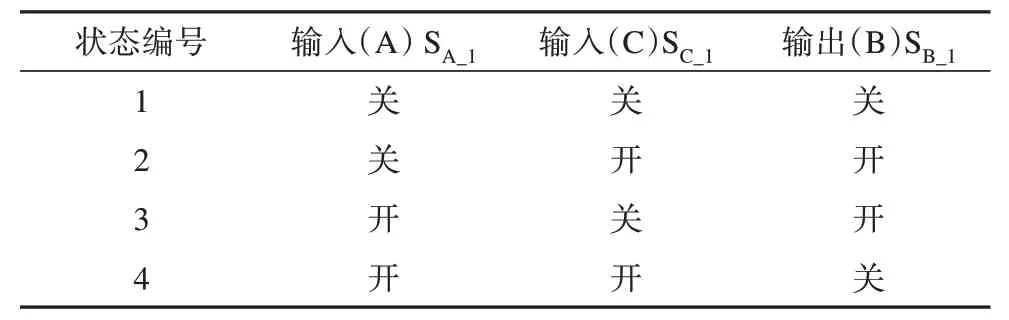
表1 异或门真值表Tab.1 XOR Gate truth table
根据表1,在切换过程中状态2、3 和4 可用,状态1 表示无效的状态,所有的开关都处于OFF 状态。在正常操作期间,其中两个开关处于ON状态。开关SA_1和SC_1决定了中间开关SB_1的工作状态,其数学公式可以表示为SB_1=SA_1异或SC_1。
2 交直流混合微网功率协同控制策略
2.1 子网下垂控制策略
微网中分布式电源可分为可调度型DGs和不可调度型DGs。其中可调度型DGs主要为可控的分布式电源,而如风机和光伏等会因天气等因素影响具有波动性、间歇性,则称为不可调度型DGs。关于微网中的不可调度型DGs的控制方法许多现有文献已做详细介绍,不是本文研究重点,本文主要研究微网内可调度型DGs的控制策略。
2.1.1 交流子网的功率分担控制
交流微网中的P-f下垂控制是通过模拟同步发电机的一次工频特性曲线设计以实现并联DGs间的功率共享。交流子网中第n台DGs 的下垂控制表达式为:
式中:f和Vac分别为交流微网中第n台DGs 输出有功的频率与交流输出电压;f*和分别为交流频率与电压额定值;fmax、fmin、Vmax、Vmin分别为频率与交流电压允许的最大值和最小值;an、cn分别为交流有功下垂特性曲线与交流无功功率下垂特性曲线的下垂系数;Pac_n、Qac_n分别为第n台DGs 的输出有功功率和无功功率;分别为第n台DGs 允许输出的最大有功功率与最大无功功率。交流微网中的所有源可以按其额定容量成比例分担功率。
2.1.2 直流子网的功率分担控制
直流子网中第m台DGs的下垂控制表达式为:
式中:V为直流子网中第m台DGs 输出电压;V*为输出电压额定值;Vmax、Vmin分别为输出电压允许的最大值和最小值;bm为直流下垂特性曲线的下垂系数;Pdc_m为第m台DGs 的输出有功功率;为第m台DGs允许的最大输出有功功率。
由于直流下垂控制固有的电压偏差以及线路阻抗的原因,下垂控制输出的电压值不可避免地会偏离母线电压额定值,因此需对下垂控制进行改进,改进后的下垂控制表达式为:
式中:V'=V*+ΔV为修正后的电压值;ΔV为电压补偿值,其表达式为:
式中:Kpv、Kiv分别为电压修正二次控制的比例和积分系数;Vdcbus为直流母线电压的实际值。直流微网中的所有源可以按其额定容量成比例分担功率。
通过上述交、直流子网网内针对微源设计的功率分担策略可实现子网内的“源-荷”功率协同控制。
2.2 网级功率协同控制策略
2.1节介绍了单个子网的功率控制策略。本小节将分析介绍子网级的功率协同控制策略。混合微网不同于单子网结构微网,子网间存在功率耦合作用,控制更为复杂,需要协调的功率控制策略来控制功率流,以提高混合微网的整体系统稳定性。
2.2.1 交直流子网间功率互济控制
当交流子网和直流子网容量近似且其中两个子网的负载情况不同导致子网的功率盈亏存在差距时,网间功率互济就应动作,将有功率盈余子网中的有功传输到功率缺额的子网中以避免单个子网发生崩溃。网间功率互济控制将采集到的交流母线频率值与直流母线电压值进行归一化,然后进行数值比较。若归一化后的值相等则说明子网内功率控制可以完成子网内的功率平衡,若归一化后差值不为0 则将其差值输入到PI 控制器以计算出重载微网所需的功率进行功率输送。
由于混合微网中子网的下垂控制参考系不同,为了方便比较需进行归一化。通过归一化,将两个子电网之间的负载差异与ILC 上输送的功率流联系起来。归一化值定义为:
式中:Nf和分别为交流频率和直流母线电压的标幺值;f为交流频率;Vdc为直流母线电压;fmax和Vmax分别为空载时交流频率和直流母线电压的最大值;fmin和Vmin分别为满载时交流频率和直流母线电压的最小值。
本文重点研究不同子网间的功率协同控制方案,故将交流和直流子网中基于下垂控制的可调度型DGs组合为交、直流子网内的一个交流主电压源和一个直流主电压源。交、直流子网中组合下垂特性曲线分别为:
式中:A和B分别为交、直流子网中的组合下垂系数;u和v分别为交、直流子网中DG 的数量;分别为交、直流子网中所有DG注入交流母线和直流母线的净有功功率。
根据式(6)—(7)中归一化值的定义,每个子网中DG 的有功功率的归一化下垂特性可以分别从式(8)—(9)中推导出来。因此,子网中所有DG 的组合下垂特性曲线的归一化表达式为:
式中:Nf'和分别为综合下垂特性曲线下的交流频率归一化值和直流电压归一化值;m和n为中间变量。
基于归一化Nf'和值,将y轴上的量统一到一个坐标系下,将两个子网的负载差异与BADC 与BDDC 上传输的功率联系起来,以确保所有源之间的比例功率共享。
设定由储能公共母线流入子微网功率为正,则通过BADC与BDDC交换的基于PI控制的标幺化功率为:
式中:Pba、Pbd分别为从交流、直流子网通过BADC 和BDDC 流入储能公共母线的共享功率;Kp1、Ki1与Kp2、Ki2分别为相应PI 控制的比例和积分系数;为储能母线的标幺值;s为积分算子。
交、直流子网进行网间功率传输时有:
式中PT为交直流子网间传递的功率,设定由交流子网流向直流子网为正。
通过交直流子网的网间功率互济平抑网内“源-荷”协同控制难以解决的子网内功率波动,实现功率的双向流动,实现“网-网”功率协同控制,从而提高整个混合微网的可靠性。
2.2.2 储能子网功率控制
本节主要研究储能子网的控制策略,将分布于子网内部的储能单元组成储能子网以达到简化控制复杂度的目的,文中取储能放电时为功率正方向。储能的控制思路为当储能单元SOC不同时首先平衡不同存储的SOC,以避免过度使用某个储能单元。当所有储能单元的SOC平衡时,它们可根据其自身容量共享功率流。
第j个储能单元的基于SOC 的下垂控制的表达式为:
式中:j为第j个储能单元;为外环输出的内环参考电压,通过振幅限制元件将其钳制在正常范围[Vdsmin,Vdsmax]内;分别为下垂控制和储能荷电状态控制的输出;为额定储能母线电压,其允许的最大值和最小值分别为Vdsmax、Vdsmin;rε,j和rλ,j分别为下垂系数和增长系数;ids,j为滤波后的储能BDDC 输出电流;为蓄电池的荷电状态。
由库伦公式可知第j个储能单元荷电状态计算为:
下垂系数rε,j表达式为:
式中imax,j、imin,j分别为第j个储能所允许的最大输出电流和最小输出电流。
增长系数rλ,j表达式为:
从式(18)可以看出所有储能的增长系数都是相同的。通过式(15)可得,储能单元的输出电压同时由储能荷电状态和输出电流调节。
忽略线路电阻上的压降,各储能单元输出电压近似相等,可得出式(19)。
式中i、j分别为不同的存储单元。将内环视为“1”,即,结合式(15),可得:
根据式(20)可知,若储能单元间的SOC 不平衡,荷电状态高的储能单元可以增加放电功率或降低充电功率,而荷电状态低的储能单元可以降低放电功率或增加充电功率。最终,不同储能单元的SOC可以在稳态下平衡。
当所有储能单元的SOC平衡时结合式(18),可知不同储能单元的值相同。因此,基于储能单元SOC的改进下垂控制退化为常规下垂控制,即:
当控制策略退化为传统下垂控制后,储能单元间可以根据下垂系数rε,j共享功率。含3 种底层控制的整体控制策略控制框图如图4所示。

图4 整体控制策略框图Fig.4 Block diagram of the overall control strategy
2.3 混合微网场景自适应功率分段控制
混合微电网运行状态可划分为以下5种场景。
1)运行场景1:混合微网子网内部发电单元输出功率略微超出或低于子网内负荷需求,但对混合微网整体运行的影响是在可接受范围内。子网内部功率自治,此时设置动作死区,避免不必要的网间功率互济与储能子网的启用。
式中Pess,c和Pess,d分别为储能子网的充电功率与放电功率。
2)运行场景2:混合微网直流子网内部发电单元不足以满足子网内负荷需求,此时根据交流子网剩余容量情况,启用交直流子网间功率传递或启用储能以补足功率缺额。
式中:Pac,sub和Pac,load分别为交流子网内各分布式电源的总输出功率和子网内负载总需求功率;Pdc,sub和Pdc,load分别为直流子网内各分布式电源总输出功率和直流子网内负载总需求功率;α为网级功率协同控制策略的启用系数。
3)运行场景3:混合微网交流子网内部发电单元不足以满足子网内负荷需求,此时根据直流子网剩余容量情况,启用交直流子网间功率传递或启用储能以补足功率缺额。
4)运行场景4:交直流子网内部负荷都出现一定程度的功率缺额,则网间功率传输不动作,仅储能子网发出功率给子网实现混合微网功率平衡。
5)运行场景5:场景为混合微网内部子网均轻载,不仅可实现功率自足且有剩余功率,则储能动作剩余能量由储能子网吸收。
式中θ1和θ2分别为网间功率传输与储能子网动作的启用值。
通过引入启用系数α,可协调控制网间功率互济和储能子网的启动顺序,同时避免网级功率控制策略不必要的频繁启用。
为了准确识别以上各种微网运行场景,并实现微网运行场景变化时及时的场景切换过渡,本文提出了一种基于混合微网运行场景的功率自适应分段控制。该控制策略如表2 所示,首先将交流母线频率与直流母线电压允许范围的归一化值划分为3段,并划分两个不同的边界值|θ1|和|θ2|。其中|θ1|、|θ2|可根据实际工程需要取值,本文中|θ1|取0.2,|θ2|取0.6,0<|θ1|<|θ2|<1。通过该分段控制策略可协调控制前述3 种功率控制策略可应对微网不同运行场景下功率波动,以实现混合微网“源-网-荷-储”的功率协同控制,提高整体运行可靠性。该控制策略可避免不必要的网间功率输送与储能的频繁充放电。该上层控制框图如图4 所示,首先将交、直流功率特征量进行归一化处理,随后将功率特征量分别与边界值|θ1|和|θ2|作比较判断,根据交、直流功率特征量所属区间查表2,获得底层控制的启用信号。
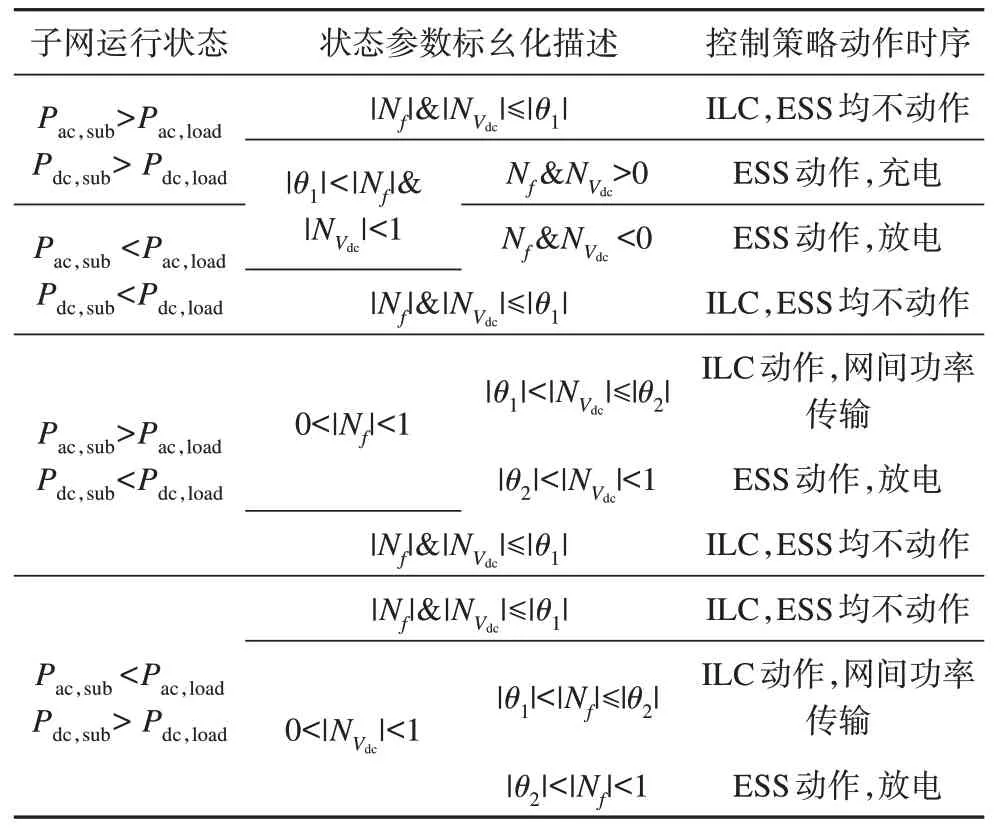
表2 交直流混合微网场景自适应功率分段控制策略Tab.2 Adaptive power segmentation control strategy of AC/DC hybrid microgrid scenarios
3 仿真分析
本文搭建了图4所示的MATLAB/Simulink 交直流混合微网模型,对交直流混合微网功率协同控制策略进行验证,仿真参数如表3所示。
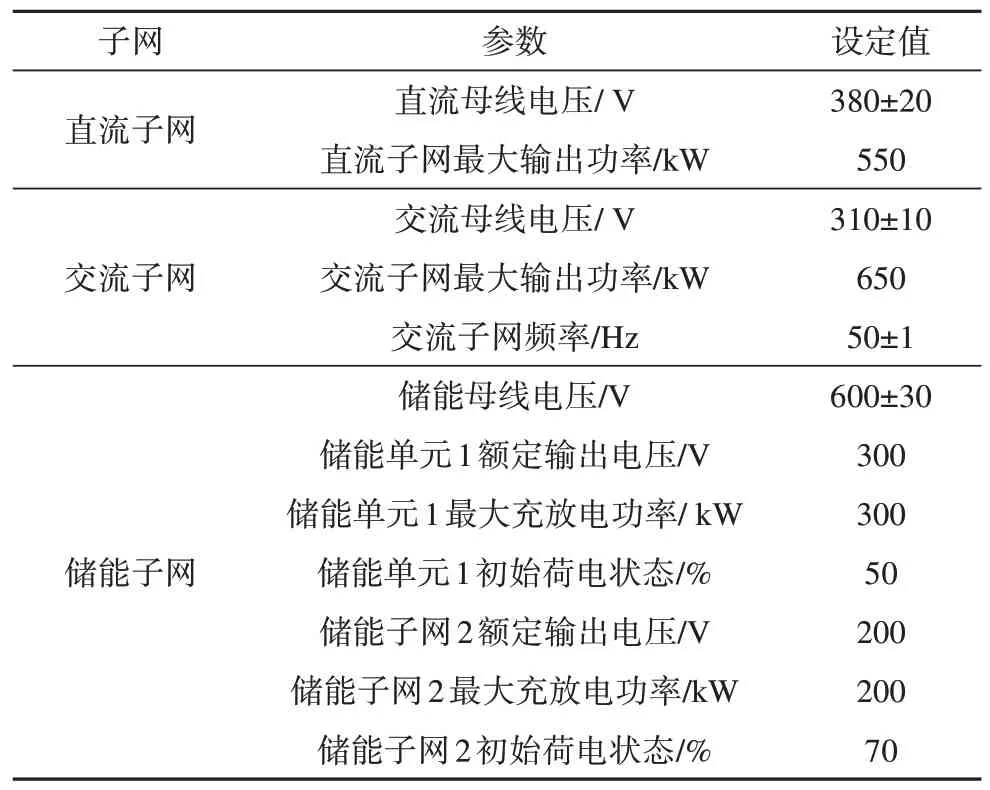
表3 混合微网仿真参数Tab.3 Simulation parameters of hybrid microgrid
根据上述系统本文设计了7 种工况来验证所提控制策略的有效性,仿真分析了子网由轻载状态到重载状态再回到轻载状态过程中分布式电源出力、网间功率输送与储能子网出力情况。其仿真波形如图5—6 所示。其中PBADC、PBDDC分别为交流子网传输功率和直流子网传输功率,PDS、PDS_n分别为储能子网总输出功率和储能单元输出功率。子网传输功率取由储能母线流入子网为正方向,储能单元设定功率输出为正方向。
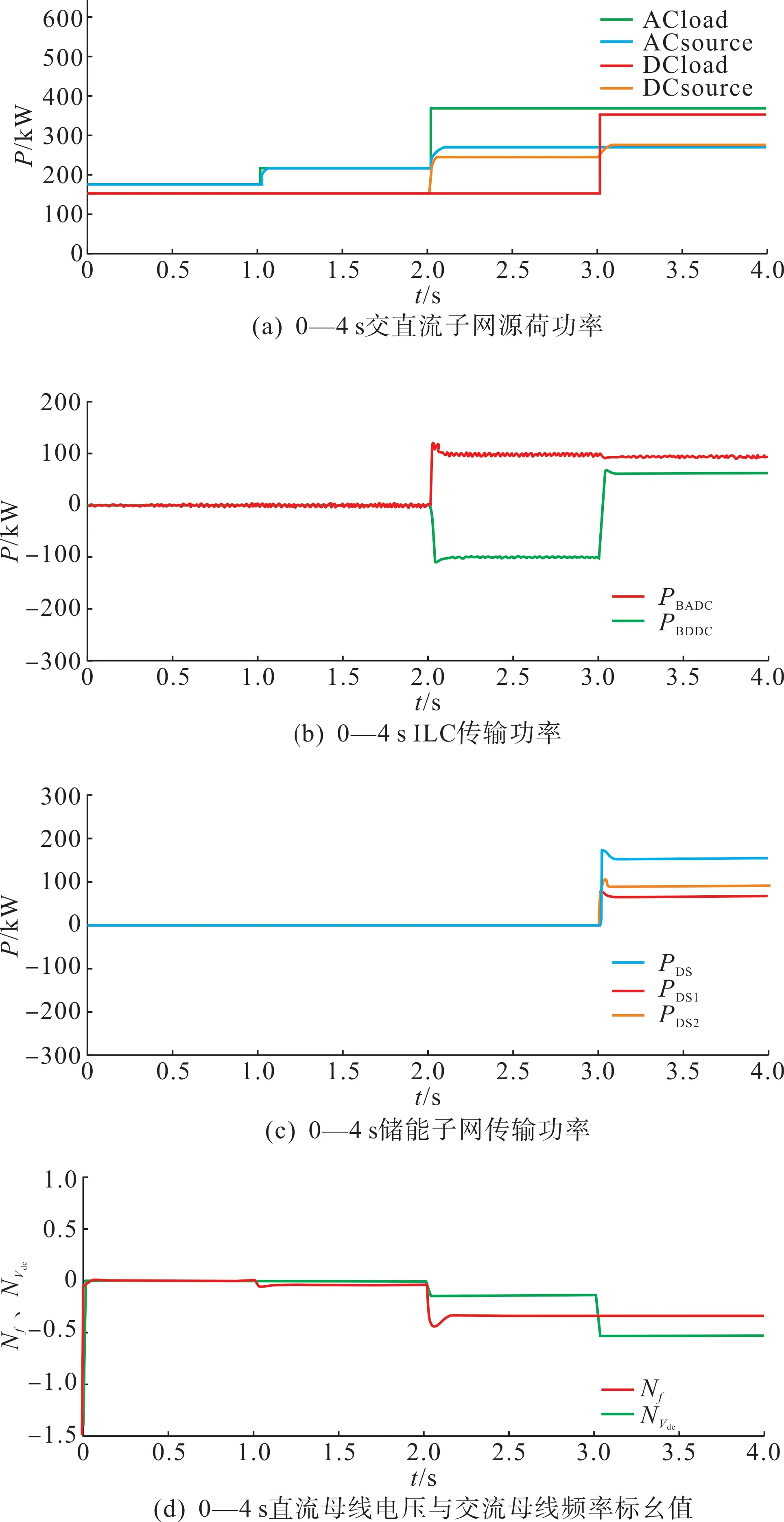
图5 0—4 s混合微网仿真结果Fig.5 Simulation results of 0—4 s hybrid microgrid
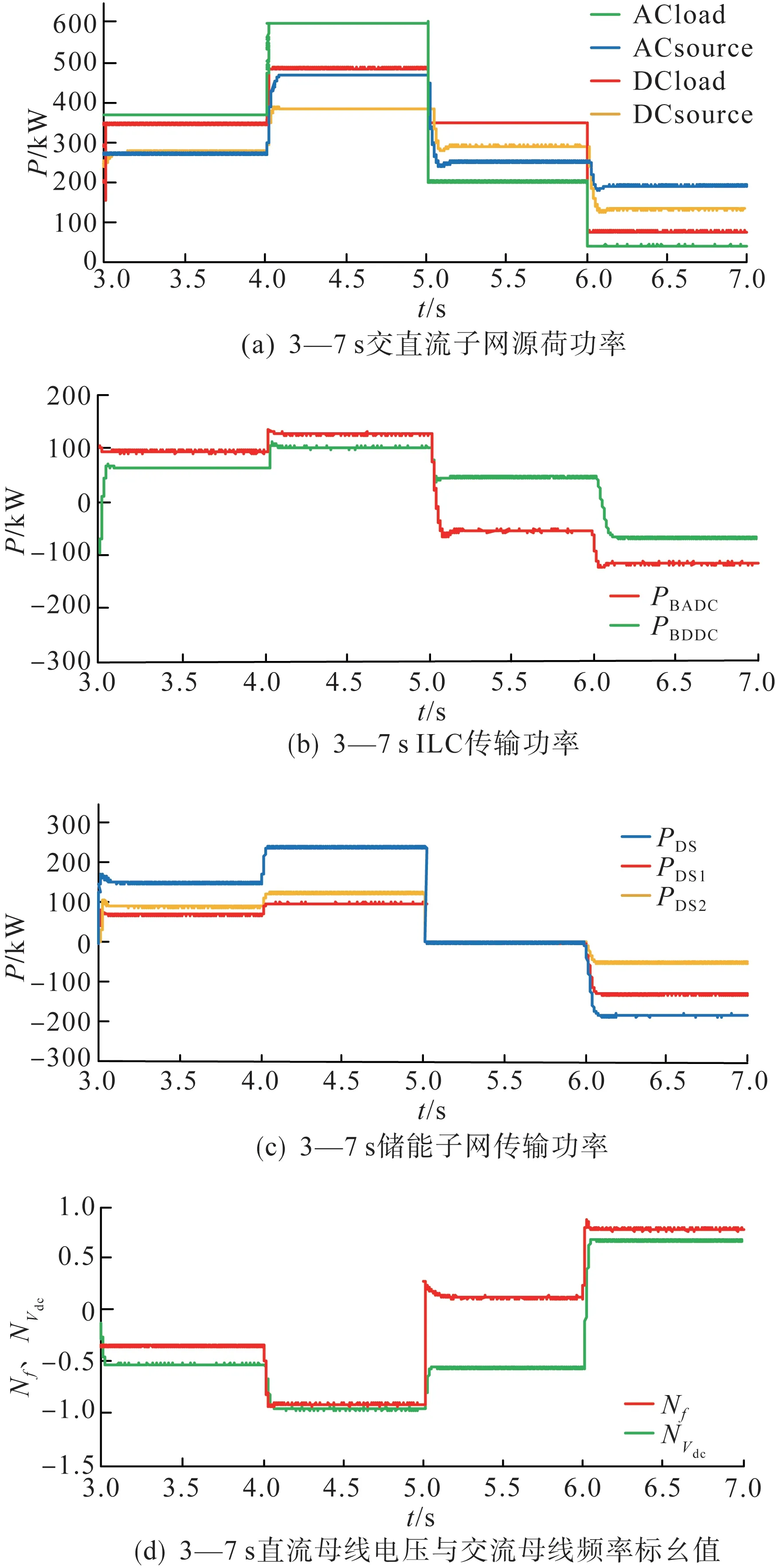
图6 3—7 s混合微网仿真结果Fig.6 Simulation results of 3—7 s hybrid microgrid
工况1:初始时刻t=0 s 时,交流子网与直流子网初始负载分别设定为180 kW 和150 kW。此时Nf与分别为0.05 和0.02。根据表2 判断条件可知,网间功率传输与储能子网均不动作,子网间不存在任何功率交互。仅由交直流子网内的分布式电源提供负载所需功率。此时交流微源总输出功率为182 kW,直流微源总输出功率为151 kW。
工况2:在t=1 s 时,交流负载由180 kW 增加到220 kW,直流负载保持不变。此时Nf由0.05 变为-0.07,因直流负载不变,故仍维持为0.02。此时|Nf|与均小于|θ1|,由表2 判断得交直流子网仍可维持功率自治,子网内负载仍仅由子网内微源提供所需功率。此时交流微源总输出功率为223 kW,直流微源总输出功率保持不变。
工况3:在t=2 s 时,交流负载由220 kW 增加到370 kW,直流负载仍保持不变。此时Nf由-0.07变为-0.35,在突加负载时维持不变。由于小于|θ1|但|Nf|大于|θ1|且小于|θ2|,根据表2 故交直流子网间传输功率进行功率互济。此时交流微源总输出功率为272 kW,直流微源总输出功率为253 kW,直流子网向交流子网通过BADC 与BDDC 传输功率约为100 kW,稳态后变为-0.13。
工况4:在t=3 s 时,直流子网负载由150 kW增加到350 kW,交流子网负载保持不变。此时由-0.13变为-0.57,Nf保持不变。此时与|Nf|均大于|θ1|且和Nf均小于0。由表2得,交直流子网间不进行网间功率传输,储能子网动作输出功率。此时交流微源总输出功率为275 kW,直流微源总输出功率为284 kW,储能子网总输出功率为161 kW,BADC 与BDDC 分别传输95 kW 和66 kW 的功率。储能单元1 输出功率为70 kW,储能单元2输出功率为90 kW。储能单元的输出功率不同于其额定放电功率之比,这主要是因为储能单元1 的初始荷电状态比储能单元2 的初始荷电状态低所导致的。储能单元2 的输出功率比储能单元1 高也证明了所提出的结合荷电状态的改进下垂控制的有效性。
工况5:在t=4 s 时,交流负载由370 kW 增加至600 kW,直流负载由350 kW 增加至490 kW。此时,Nf由-0.35 变为-0.87,由-0.57 变为-0.92。由于与|Nf|均大于|θ1|且和Nf均小于0,则根据表2 判断得,直接由储能子网提供功率支持,网间功率传输不动作。此时交流子网微源总输出功率为474 kW,直流子网微源总输出功率为386 kW,储能子网总输出功率为230 kW。其中储能单元1 与储能单元2 分别输出100 kW 与130 kW的功率。BADC 和BDDC 分别传输126 kW 和104 kW。此种工况下也证明了考虑储能荷电状态的改进下垂控制策略的有效性。
工况6:t=5 s 时,交流负载由600 kW 减小到200 kW,直流负载由490 kW 变为350 kW。此时Nf由-0.87 变到0.13,由-0.92 减小到-0.58。由于|Nf|小于|θ1|且小于|θ2|,则根据表2可得,交直流子网网间功率传输动作,储能子网不动作。通过BADC 与BDDC 从交流子网向支流子网传输52 kW的有功。此时交流微源总输出功率为252 kW,直流微源总输出功率为298 kW。
工况7:t=6 s 时,交流负载由200 kW 减小至40 kW,直流负载由350 kW 减小至80 kW。此时Nf由0.13 变为0.73,由-0.58 变为0.65。由于|Nf|与均大于|θ1|,则根据表2 可得,储能子网动作吸收子网多余的功率,交直流子网间不进行功率交换。此时交流微源总输出功率为153 kW,直流微源总输出功率为137 kW。BADC 与BDDC 分别输送-113 kW 和-67 kW 的有功。储能子网共吸收180 kW 有功功率,储能单元1 与储能单元2 分别吸收130 kW 和50 kW 的有功。储能单元吸收功率的差异体现出考虑荷电状态的改进下垂控制的有效性。
仿真中上述7 种工况表明基于集成三端口的交直流混合微网,通过对微网运行状态的划分与准确识别,实现网内功率共享、网间功率互济与储能子网的动作的协同控制。
4 结论
由于混合微网间的功率耦合使得功率交互变得复杂,若控制不当容易影响混合微网的整体稳定运行。本文针对上述问题在3 种基本控制策略之上设计了一套自适应微网运行场景的功率协同控制策略。通过搭建MATLAB/Simulink 仿真模型,在不同工况下进行仿真实验,验证了该控制策略整体可靠有效,并得出以下结论。
1)在子网内负荷变化时,所提出的场景自适应控制策略能够充分发挥子网间的功率支撑能力。通过功率双向流动维持子网内功率动态平衡,可实现各种运行场景的准确识别与负荷需求的灵活快速跟踪补偿。
2)本文控制策略具有分散的特性,无需通信链路,方便源荷的即插即用。同时通过设定启用条件,避免频繁且不必要的网间功率传递,提高了微网系统整体运行可靠性与稳定性。
猜你喜欢
计算机时代(2023年1期)2023-01-30 04:08:22
中国新通信(2019年21期)2019-03-30 04:01:30
网络安全和信息化(2016年2期)2016-11-26 06:42:30
通信电源技术(2016年6期)2016-04-20 06:21:15
电测与仪表(2015年16期)2015-04-12 00:44:34
电测与仪表(2015年21期)2015-04-09 11:52:16
电测与仪表(2015年11期)2015-04-09 11:46:14
电测与仪表(2014年12期)2014-04-04 12:10:18
电测与仪表(2014年17期)2014-04-04 11:56:50
燕山大学学报(2014年2期)2014-03-11 15:28:26