港口机械大车行走机构机器人自动喷涂研究
2023-12-29 03:56:10王传存
港口装卸 2023年6期
王传存
上海振华港机重工有限公司
1 引言
随着“工业4.0”概念的提出,使用机器人对港口大型装备进行自动化喷涂成为必然趋势[1]。目前,喷涂机器人采用的编程方式主要有在线示教编程和离线编程[2]。这2种编程模式在自动喷涂的应用中存在着工作柔性差、编程工作量大等诸多局限性,不能适应自动化喷涂。
港机大车行走机构主要由大中小平衡梁、台车架及轮轴组件组成。如岸边集装箱起重机大车行走机构运行时的行走误差为毫米级,各项生产工艺技术尤为重要。港机工作在码头沿海区域,空气湿度大,含盐成份高,容易造成产品的腐蚀[3],因此产品的喷涂工艺十分重要,需要采用重型防腐油漆进行喷涂,要求总漆膜厚度要达到320 μm。
以大车行走机构平衡梁为目标进行机器人自动化喷涂的研究,并设计一整套的喷涂系统,包括自动扫描、自动建模和编程以及自动喷涂作业。
2 系统设计
为了满足大车行走机构的自动化喷涂,其系统的基本操作流程为:
(1)工件在扫描建模室经过机器人激光扫描后,通过无线网络将扫描数据输送到软件。
(2)软件系统根据数据进行自动化建模,生成点云模型。
(3)根据生成的模型,开始计算工件的位置以及空间数据坐标点,自动进行轨迹规划,生成喷涂机器人程序文件。
(4)根据生成的程序文件,控制喷涂机器人自主完成喷涂作业。
图1是机器人自动化喷涂系统流程图。整个喷涂系统主要分为2个工作室,分别是扫描工作室和喷涂工作室。数据的收集、模型的建立,轨迹规划以及程序的生成主要在扫描工作室完成,喷涂工作室主要负责喷涂的现场工作。

图1 机器人自动化喷涂系统流程图
3 自动扫描
3.1 扫描设备
行走机构的大平衡梁结构包含上翼板、下翼板、两侧腹板、两端封板,以及畸形附属件,需选择能够识别出板件外部形状的扫描设备。本研究采用的是一种自动化光学三坐标扫描仪,它的扫描质量和分辨率较高,而且视角大,扫描速度较快,能够有效解决扫描问题,并保证理想的测量精度和速度,用途广泛且操作简单。
3.2 数据的获取
通过用空中积放链将工件由外部输送到扫描建模室,停止在扫描建模室工件扫描的起始点,2台机器人激光扫描仪将会同时开始扫描,扫描的工作环境需要提前预设在机器人激光扫描仪里。扫描所得的产品外表面的形状和尺寸将会通过无线网络传送给双摄像头传感器,进而把这些数据传递给软件系统进行三维点云模型的处理。在相应的操作终端上可以通过具体的操作指令来查看、访问和下载数据文件。
4 自动建模与编程
开发人机互动界面,在软件中设计建模的数据库,并编写模型的关键参数函数。根据扫描获得的数据,将在软件中自动生成三维点云模型。同时,在生成点云模型图时,软件可对获得的数据自动进行简单的去噪,去除部分离群的散点,使生成的点云图像更加平滑;也可以手动进行噪点的去除,从而使模型达到更加精细的程度。系统自动生成的点云模型见图2。

图2 三维点云模型图
软件程序内部的编程文件会自动计算出各个面的喷涂轨迹,然后整合到生成的点云模型上(见图3)。也可以根据导入的模型,帮助测试生成所需的喷涂路径,进行更好的路径规划。
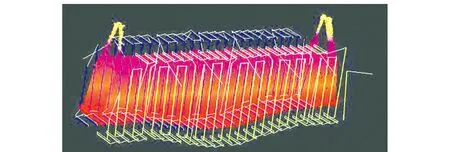
图3 自动生成的轨迹图
根据喷涂的经验,进行相关参数的微调,获得更加良好的喷涂效果,具体参数设置见表1。最后自动生成机器人能够识别的程序文件,传输给机器人完成自动化喷涂作业。

表1 喷涂设置具体参数值
5 自动喷涂
喷涂机器人采用经济型的喷涂机器人,采用的正交式球形手腕结构,负载大、刚性大、工作范围大。机器人内部含有喷涂软件包,内置外围设备I/O点,易于集成,编程简单。
将自动生成的程序指令传递给喷涂机器人,可控制2台机器人进行协调工作。对于行走机构这种对称型的表面,2台喷涂机器人较容易进行协调运作。对于非对称性结构,在自动化喷涂过程中,2台喷涂机器人的协调工作将不会那么明显,更加偏于独立工作。
在喷涂过程中,为防止A、B 2台机器人作业过程中相互影响,将工件按长度方向分为2个区域,每个区域分成约12 000 mm左右的喷涂宽度,实现机器人的错位喷涂。
悬挂的工件按照预设的程序,步进式前进,当工件到达预设位置后,A机器人从前到后进行喷涂,B机器人从后到前进行喷涂。2个区域喷涂结束后,工件继续向前移动一定的距离,机器人将继续在新的喷涂区域进行喷涂工作,最终多个区域与轨迹的拼接将会和原先规划的点云模型和轨迹重合。
在喷涂过程中,可以查看机器人的坐标信息,也可以通过手动操作的模式,使得机器人获得更高的精度和喷涂效果。机器人的操作界面见图4。

图4 机器人操作界面
6 结语
针对港机大车行走机构的机器人自动化喷涂系统进行了初步的研究试验。该系统设计能够基本满足喷涂工作的正常要求,并且各方面的喷涂效果良好,可为未来更加智能化的喷涂系统的设计提供参考依据。
猜你喜欢
农业装备与车辆工程(2021年8期)2021-08-28 09:49:16
少先队活动(2021年2期)2021-03-29 05:41:04
汽车维修与保养(2021年8期)2021-02-16 00:28:30
南方农机(2021年1期)2021-01-20 11:41:46
快乐语文(2020年36期)2021-01-14 01:10:32
学生天地(2020年17期)2020-08-25 09:28:48
港口装卸(2020年3期)2020-06-30 10:37:54
数学大王·低年级(2020年3期)2020-03-12 04:48:48
中国特种设备安全(2018年10期)2018-12-18 02:17:18
启蒙(3-7岁)(2017年9期)2017-02-26 02:52:48