
基于超声波测距的定制家具AGV避障系统设计
2023-12-26 10:02:52孙莉辰牛晓霆
林产工业 2023年12期
李 博 孙莉辰 徐 贺 牛晓霆*
(1.东北林业大学家居与艺术设计学院,黑龙江 哈尔滨 150040;2.东北林业大学机电工程学院,黑龙江 哈尔滨 150040)
板式定制家具因其能满足个性化定制、材料环保、造型时尚等优点,逐渐成为备受人们青睐的家居用品[1-2]。在定制家具行业,由于材质表面光洁度高,其运送和分拣是至关重要的环节。目前,大多数企业和生产线采用人工操作,需要投入大量的人力物力,不仅劳动强度大、工作效率低、安全性能差,同时工人在搬运过程中还容易出现磨损和碰撞,降低产品的表面美观度[3-4]。因此,在最大限度地增强家具运送工序智能化水平的同时,提高智能运送车避障的准确性,是当前亟需解决的难题[5-9]。同时,实现高效的家具分拣运送也是目前研究的热点[10]。基于此,本文针对定制家具AGV(自动导引运输车)的避障系统进行设计,以期实现快速精准的定点停止,避免障碍物影响作业的流畅性和对板材的损害,从而达到提高生产效率的目的。
国内外研究者对AGV的避障技术做了很多研究,并把避障技术应用在不同领域的AGV上。美国某公司研发的AGV可独立搬运,适合现代工厂货物搬运[11]。日本某公司设计的AGV可携带轮椅及行人物品,并能迅速、独立规划行走路线并避开行人[12-15]。法国某公司的AGV装备了自动避障系统,以保证运输过程中避免与行人及物品发生碰撞[16]。德国某公司研发了一款在油漆车间运行的自动引导车,能够准确进入各个工作站完成货物的运输[17]。日本的一家机械公司装有安全扫描设备以检测障碍物,可以实现多个搬运设备同时运行[18]。我国的AGV技术发展较晚,且距离实际工程应用还有一定的距离[19-21]。我国一家机器人公司自主研发激光自主导航技术以实现避障,能够帮助企业实现柔性化AGV智能物流系统的建设和改造[22-24]。本研究的目标是实现定制家具AGV避障系统在搬运家具时的精准高效避障。因此需要对检测运行路线上出现的障碍物进行分类,使其依据不同障碍物类型采用不同的避障方法。
1 基于超声波测距原理的AGV避障系统设计
1.1 超声波测距原理
超声波具有高频率、指向性好以及在介质内传播过程中能量损耗低等特点,能够对较宽范围的距离进行精准测量。目前应用最广泛的是压电换能器,利用单个压电芯片完成超声波的发射与接收。超声波粒子位移函数为:
式中:L(t)为位移,m;A0为初始振幅,m;ω为循环频率,rad/s;t为传播时间,s;l为传播距离,m;α为阻尼系数;k为波数;Ae为传播面积,m2;f为振动频率,Hz。
从式(1)与(2)可以看出,超声波振动频率越大、衰减系数越大、信号越弱,其能量越大。高频超声波信号在能量、散射距离、反射率等方面低频信号更具优势。根据这些特性,能够得到被测距离。图1(a)为渡越时间检测方法原理图。其距离和声速之间的函数关系如公式(3)~(5)所示。
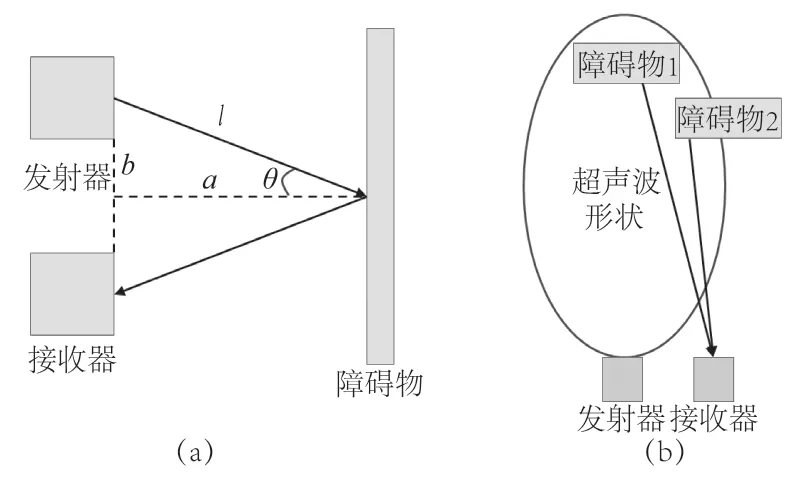
图1 测距原理图与碰撞示意图Fig.1 Principle for distance measurement and diagram of collision
式中:v为常温下的声速,m/s;l为超声波传播行程,m;t为超声波传播所需时间,s;θ为发射器发射超声波的入射角,°;b为障碍物与传感器之间的垂直距离,m;a为障碍物到发射器和接收器中点的距离值,m。
1.2 测距偏差分析
首先,研究超声发射器入射角对测量结果造成的影响,这有助于选择适当的换能器与探头及最佳入射角度。图1(b)为超声发射器和障碍物以及超声波碰撞示意图。在功率确定的情况下,发射器散射角越小,能量越集中,工作距离越远,抗干扰能力越强。因此选用散射角小的发射器,以及采集信号强的回声探测器。为保证测量不受超声波距离的影响,从而导致障碍物检测失败,应保证两障碍物处在同一平面内。
考虑到环境温度会对超声波速度造成影响,需进行温度补偿。超声波速度与空气温度的关系如下:
式中:v为声速,m/s;T为室温,℃。
由式(7)可看出,在室温的影响下,超声波的传播速度在不同介质中并不相同,不进行温度补偿会导致测距过程中产生较大误差。
最后,通过分析利用渡越时间检测方法测距过程中产生的误差可知,回波信号中夹杂着环境噪声,因此确定回声信号的起始点至关重要。研究者多采用滤波法、频谱分离法和反馈神经网络法对耦合噪声信号进行处理。这些方法只能在时域上分析单个信号[25-27]。研究采用的采样信号是40 kHz的高频超声信号,耦合噪声变化很大。为解决该问题,研究提出了基于波形阈值的算法解决方案。采用时域与频域相结合的信号处理方法同时检测并分离出两种不同频率超声回波数据,从而有效提高了接收信号的信噪比,使得回声消除更可靠、更精确。
1.3 超声波发射与接收系统设计
在超声触发电路中,激励电路开关需要较高的直流电压才能触发较窄脉冲,无法满足AGV系统的性能要求。脉冲模块中电路主要包括两大部分,即作为高级序列摆动的振荡器和作为超声波发生器的换能器。振荡器的回路基于共振原理进行控制,从而输出最佳频率的超声信号。图2 (a)为单脉冲触发电路图。
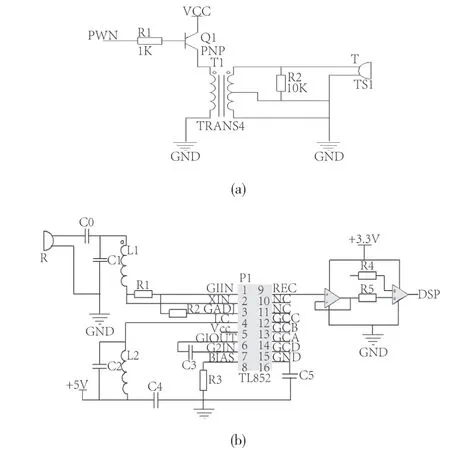
图2 超声波单脉冲触发电路及回波信号接收电路Fig.2 Ultrasonic single pulse trigger circuit and receiving circuit of echo signal
图2 (b)为接收回波信号的电路图,该电路使用超声波专用芯片TL852,电路工作频率为20~90 kHz,与40 kHz超声波信号相对应,兼顾放大、滤波、回波生成等作用。超声波检测灵敏度与其输出阻抗有密切的关系,输出阻抗越高,频率响应越倾向于谐振,进而使得灵敏度大幅提高。随着外部阻抗的降低,频率响应曲线逐渐变缓,频率响应带变宽,灵敏度下降,甚至会导致传感器最大灵敏度逐渐向低频偏移。因此,采用高阻抗前置放大器来提高接收器灵敏度。
2 基于超声波测距的避障策略程序设计
超声波的定位模块如图3所示,其工作原理是数据采集卡发出电压,由接线盒将信号传输至发波调理电路。通过超声波换能器发出信号,当碰到障碍物时信号返回,被下一个超声波换能器所接收,传输至收波调理电路中将信号放大,最终由接线盒返回到数据采集卡中。如此循环,便能实现精确的超声波定位信号传递。
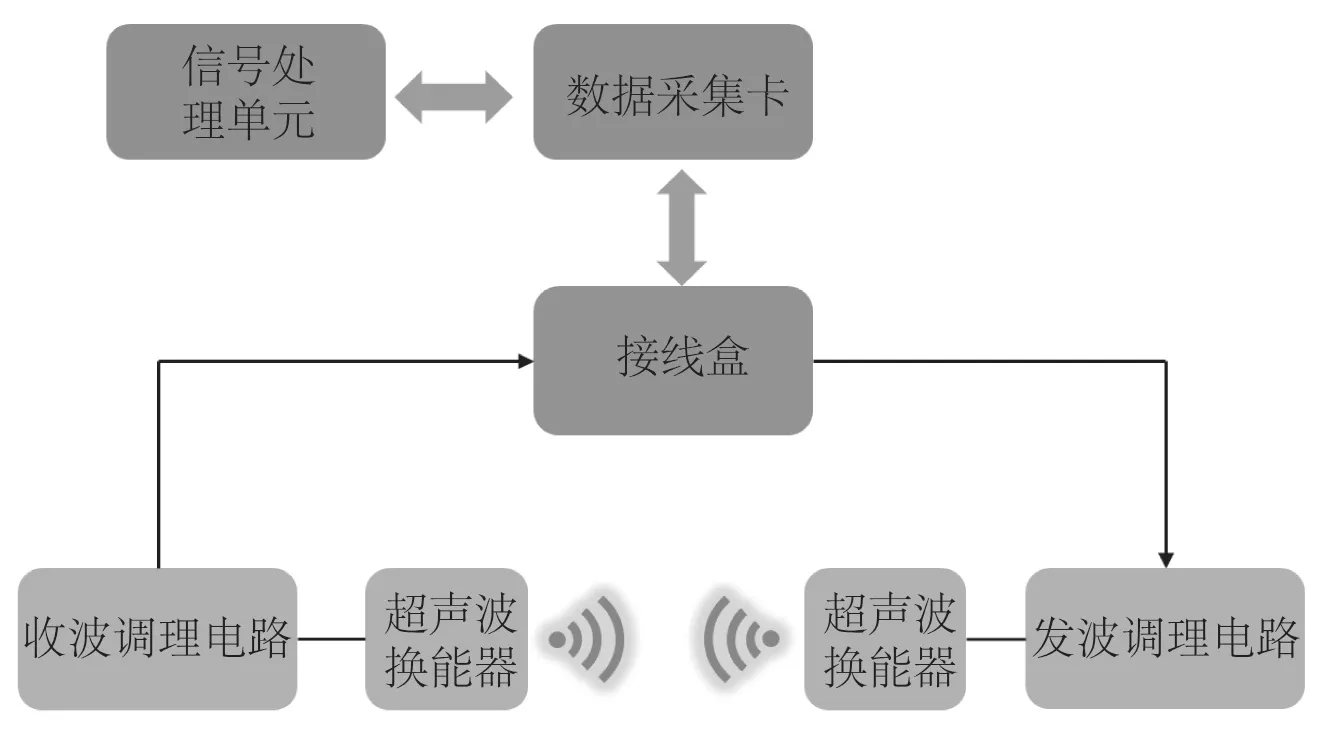
图3 超声波定位模块结构图Fig.3 Structural diagram of ultrasonic positioning module
图4为超声测距的避障信息处理流程图。当距离小于阈值时,AGV则停止运动,系统发出警告信号,LCD屏幕显示实时距离。采用阈值小波滤波对超声波信号进行处理,可以降低环境噪声的干扰,从而使输出信号具有较好的分辨率。中值滤波算法剔除测量距离最高值与最低值后,其余数值以取平均值形式呈现,此方案有效消除了随机误差并且提高距离精度。通过3个步骤利用DSP实现小波阈值去噪,分别为信号的详细分解、量化具体阈值、重构量化波前阈值。将计算得到的小波系数量化并在小波重构单元中重构,最终实现信号降噪建模。
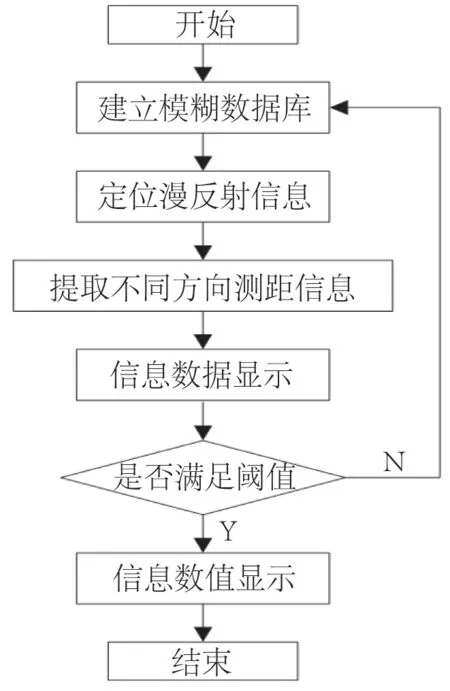
图4 基于超声测距的避障信息处理流程Fig.4 Obstacle avoidance information processing process based on ultrasonic ranging
小波重建过程是小波分解过程的逆过程,重建后得到去除噪声的回波信号。阈值选取方法为:
式中:λ为小波阈值,dB;σ为信号噪声强度,dB;N为选取的信号长度;j为小波分解尺度。
可见,阈值与分解尺度呈反比。受噪声模型分布特性影响,分解尺度越大,小波分解阈值越低。回波信号硬件和小波阈值去噪处理后回波信号硬件的仿真图如图5~6所示。显然,去噪处理后的回波信号起始位置的清晰度得到了提高,这使得DSP更容易检测到回波信号,有效提高了检测精度。
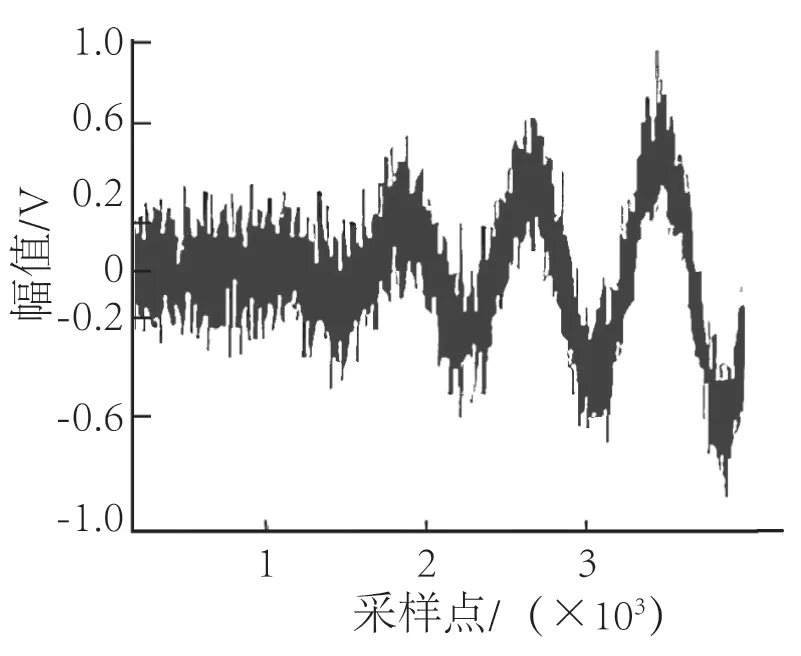
图5 回波信号仿真图Fig.5 Echo signal simulation diagram
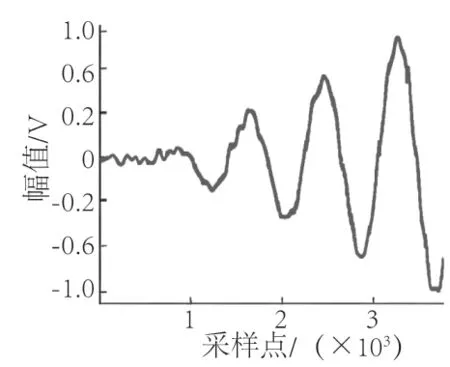
图6 小波阈值去噪后回波信号仿真图Fig.6 Simulation diagram of echo signal after wavelet threshold denoising
3 AGV控制系统超声测距避障模块的性能测试
在工厂仓库内进行定制家具搬运避障试验。传统的滤波方法为傅里叶变换法,无法对非稳态信号进行处理,小波阈值变换算法能够从时域与频域上对信号进行局部特征分析。在常温下选取8个间距不等的测试点进行试验,小波阈值变换滤波算法在环境温度为20 ℃时的试验结果如表1所示。小波阈值算法与中值算法相比(表2),距离测量精度明显提高,测量数据相对误差降低。图7为不同温度下测量距离与测量误差之间的对应关系。由此可见,加入温度补偿后,典型温度下的测量精度很高,相位误差较低,对环境适应性强。系统所造成的误差主要源于产生超声波的DSP芯片时间启动不一致。另一个原因是,不对等布线使有用信噪比会因为硬件电路设计干扰而下降,导致测量精度下降。因此在试验中,为避免产生该误差,应尽可能使超声波换能器平面平行于障碍物平面,减小由于系统布局问题带来的意外误差。综上,设计的AGV避障系统能够实现安全避障的功能,符合预期要求。
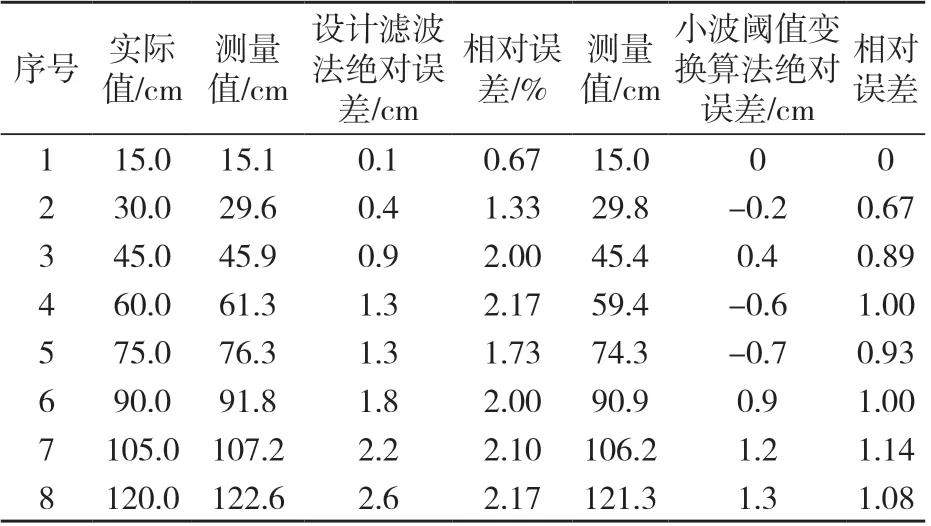
表1 室温下(20 ℃)不同算法试验结果Tab.1 Experimental results of different algorithms at room temperature (20 ℃)/%
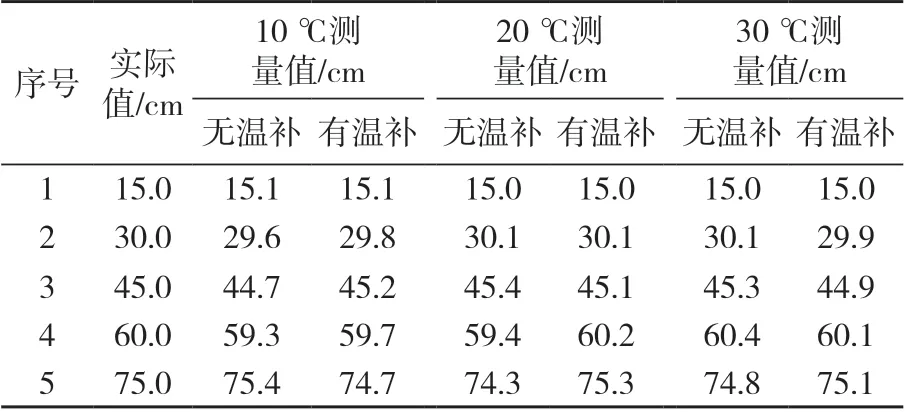
表2 不同温度下有无温补电路的试验结果Tab.2 Experimental results of temperature compensation circuit at different temperatures
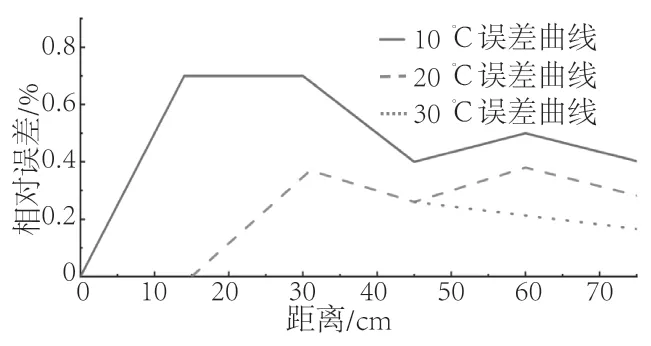
图7 不同温度下测量距离与测量误差之间的对应关系Fig.7 Relationship between measurement distance and measurement error
4 结论
本文在超声波传感器的基础上设计了定制家具AGV避障系统,充分发挥超声波传感器方向性良好、不易受外部环境干扰等优势,设计出的避障系统能够高效可行地探测到实时交通信息从而实现车辆避障运动。此外,以定制家具存储仓库为测试环境进行试验验证,试验结果表明,基于超声测距的定制家具AGV能够实现精准、稳定的避障控制,验证了避障控制的准确性。由于实际作业环境中障碍物种类繁多且移动剧烈,可将该方法运用到存在移动障碍物的作业环境下,利用新的环境数据对模型进行训练,进而使避障方法与障碍物相适应。
猜你喜欢
阅读与作文(小学高年级版)(2020年12期)2020-12-23 04:34:37
河北画报(2020年8期)2020-10-27 02:54:40
动漫界·幼教365(中班)(2020年3期)2020-04-20 11:03:27
铁道通信信号(2020年9期)2020-02-06 09:15:54
科学(2020年3期)2020-01-06 04:02:51
现代装饰(2018年12期)2018-12-29 13:03:36
电子制作(2017年7期)2017-06-05 09:36:13
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01 02:53:55
太空探索(2014年1期)2014-07-10 13:41:50
城市道桥与防洪(2014年5期)2014-02-27 07:26:44
