无人机仿地倾斜摄影建模精度浅析
2023-12-25 07:14李林辉张林杰
北京测绘 2023年9期
罗 卫 李林辉 张林杰 黄 筱 冯 刚 熊 豪 左 强
(中国电建集团贵阳勘测设计研究院有限公司,贵州 贵阳 550081)
0 引言
从“数字地球”“数字水利”到“智慧地球”“智慧城市”[1-2“]智慧园区”[3“]智慧水利”[4]等概念的转变和拓展,反映了数字测绘信息从平面模式向着三维立体多元模式发展。无人机倾斜摄影测量在各项三维建模任务中发挥重要作用[5]。
低空无人机航摄易于避开密云、机动性强、周期短、效率高,能轻松到达高危区域,快速获取和更新测绘基础数据。无人机搭载单个或多个高清数码镜头采集器获取地表信息,结合内业数据质检和空中三角测量等一系列处理步骤,最终建立真实三维模型。同时,由于地面高差信息表征的复杂性,传统无人机飞行高度恒定方法获得的像片质量因位移差异而降低。无人机以不同的高度仿地航摄作业,即无人机同拍摄地表高差基本保持一致,获取恒定地面分辨率、更小畸变的基础数据,提高建模的真实性和准确性。近年来,不少学者对无人机仿地飞行倾斜航摄展开了一定研究和应用。文献[6]设计无人机变高飞行的倾斜航摄作业获取水库地区基础图像数据,通过后续内业处理,完成的1∶500大比例尺地形图满足精度要求;文献[7]将多旋翼无人机通过仿地飞行航摄快速完成了复杂矿区1∶1 000 比例尺地形图的量测工作;刘文锴等[8]利用无人机仿地飞行航摄数据建立南水北调输水渠三维模型,用以精确挖填方计算等应用;赵佳等[9]研究无人机仿地技术在植保方面的应用。鉴于此,在地形高差明显地区探索变高飞行的无人机倾斜摄影建模,对提高实景三维精细建模整体质量具有一定现实意义。
1 倾斜摄影测量技术概述
1.1 仿地飞行技术原理
无人机飞行采集测区内图像数据前,根据现有高程数据,取测区平均高程作为航拍基准面。从相机物镜中心到航拍基准面的垂直距离称为摄影高度。飞行高度与摄影基准面的差值严格规定,根据立体空间相对前交原理,可以计算出飞机航高,公式为
式中:h为航高;a为像元尺寸;GSD(ground sample distance)为摄影地面分辨率;f为摄影机镜头焦距。若无人机在地形高差明显的区域以恒定高度飞行,实际的GSD 会相应降低,影响后续建模质量。相比传统恒定航高飞行倾斜测量,变高飞行倾斜测量能够与地表保持相对恒定高差,保证地面摄影分辨率GSD 基本相同,即无人机仿地测量有效解决高差明显引起地面分辨率悬殊问题。图1为恒高飞行和仿地飞行倾斜摄影测量原理示意图。

图1 恒高、仿地飞行倾斜航摄示意图
无人机仿地飞行技术[10-11]实现,大致经历以下步骤:
(1)测区地形数据准备。将给定范围线定位至测区,下载对应的地形数据;在此基础上,以一种平滑的滤波方法跟随地形预处理,导入飞行路线的地形数据。
(2)仿地飞行航线计算。根据无人机实际飞行速度和航线平均长度,计算高度采集点距离和对应点的海拔高度,以平滑滤波算法建立航线高度模型,找出模型极值点,继而算出极值高度差和无人机同地面间的垂距与斜距。
(3)仿地航线飞行。每条航线相邻采集点逐步插值,根据极值点高度差与飞行高度比较和垂斜距夹角,实现无人机飞行升降速率调整。
1.2 空中三角测量技术
无人机可大范围采集航摄数据而广泛应用。空间后方交点法计算外部位置元素,至少需要4个已知地面控制点计算立体相对,然而大范围的测区不能依靠传统方式测量控制点[12]。测量少量图像控制点,利用摄影测量对大量的图像控制点加密,以满足立体图像对的映射,该过程被称为空中三角测量,亦称为空中三角测量加密(简称空三加密)。简言之,空中三角测量根据航摄相片量测像点坐标和像控点大地坐标,通过投影、透视变换、共线方程等严谨的模型,计算图像外方位元素过程,可用于地形图绘制或高精度摄影测量加密[13]。
式中,x、y为像点平面坐标;x0、y0、f三个元素确定摄影中心与像片位置相对关系的内方位元素;(XA,YA,ZA),(XS,YS,ZS)分别表示地物点与拍摄点在物方空间坐标系的坐标;a1,a2,...,c2,c3则表示包含了相机拍摄瞬间3个姿态角ϕ、ω、κ构成的方向余弦正交矩阵R。该方程最大特点可将相机拍摄到的真实地物点及其在相机平面的对应像点坐标相互联系,成为空中三角测量加密控制点有力的理论依据。
2 倾斜摄影数据采集和处理
2.1 测区概况和航线设计
测区水利枢纽位于贵州省黔西北毕节市,地处云贵高原腹地。测区大致呈长方形,面积约8.6 km2,高差约450 m。测区地物主要包括大坝主体、道路、大坝监测站、项目营地及当地居民楼。主要地貌为大高差的河谷和陡崖。
对外业航飞数据采集前,首先需规划航线。由于现场高差起伏大,直接导入全球数字高程模型(digital elevation model,DEM)不能满足无人机仿地飞行精度要求和安全条件,需利用低分辨率单相机影像,获得精扫的数字地表模型(digital surface model,DSM)辅以航线设计。本次任务设计的影像地面分辨率为3 cm,无人机采用仿地飞行以保证摄区最低点分辨率达到精度要求。规划航线的航向重叠率为80%,旁向重叠率为65%。本次测区实际航飞总面积约9.0 km2,飞行3 架次,航飞时长约4 h,共获取7 600 张影像。对航飞数据质量进行检查:航片清晰,光照色彩真实,基本符合倾斜摄影建模要求。
2.2 数据处理
采用Smart3D 软件开展内业数据处理。该软件集地理参考数据(像片或激光点云数据)自动处理生成三维模型,对数据和建模尺寸兼容性强、自动化程度高,已成为三维实景任务常用软件[14-16]。将像片和定位定姿系统(position and orientation system,POS)数据导入软件,经过区域网联合平差、匹配密集连接点、空中三角测量解算、多视图立体匹配、网格优化、精细纹理映射和场景瓦片化等步骤,输出具有真实地理信息、TIN以及纹理格式的倾斜三维场景模型。
外业数据采集与处理的详细步骤如图2所示。

图2 外业数据采集与内业处理流程
与定高飞行的倾斜模型相比,仿地倾斜航摄模型展现出水利枢纽及周边地物的细节纹理模型特征更加细腻清晰,更接近真实场景,如图3所示。

图3 仿地倾斜航摄建模结果
3 仿地倾斜建模和精度分析
为验证基于仿地飞行倾斜航摄得到的影像倾斜建模精度,无人机数据拍摄结束,在测区采集了房角、公路标志线等44个特征明显坐标作为模型精度检查点。
内业建模结束,将采集的检查点坐标导入倾斜三维模型,逐个对比外业采集的特征检查点坐标与模型特征检查点坐标空间位置的偏差,得出仿地航摄倾斜模型质量精度。表1列出各特征检查点的平面和高程误差。
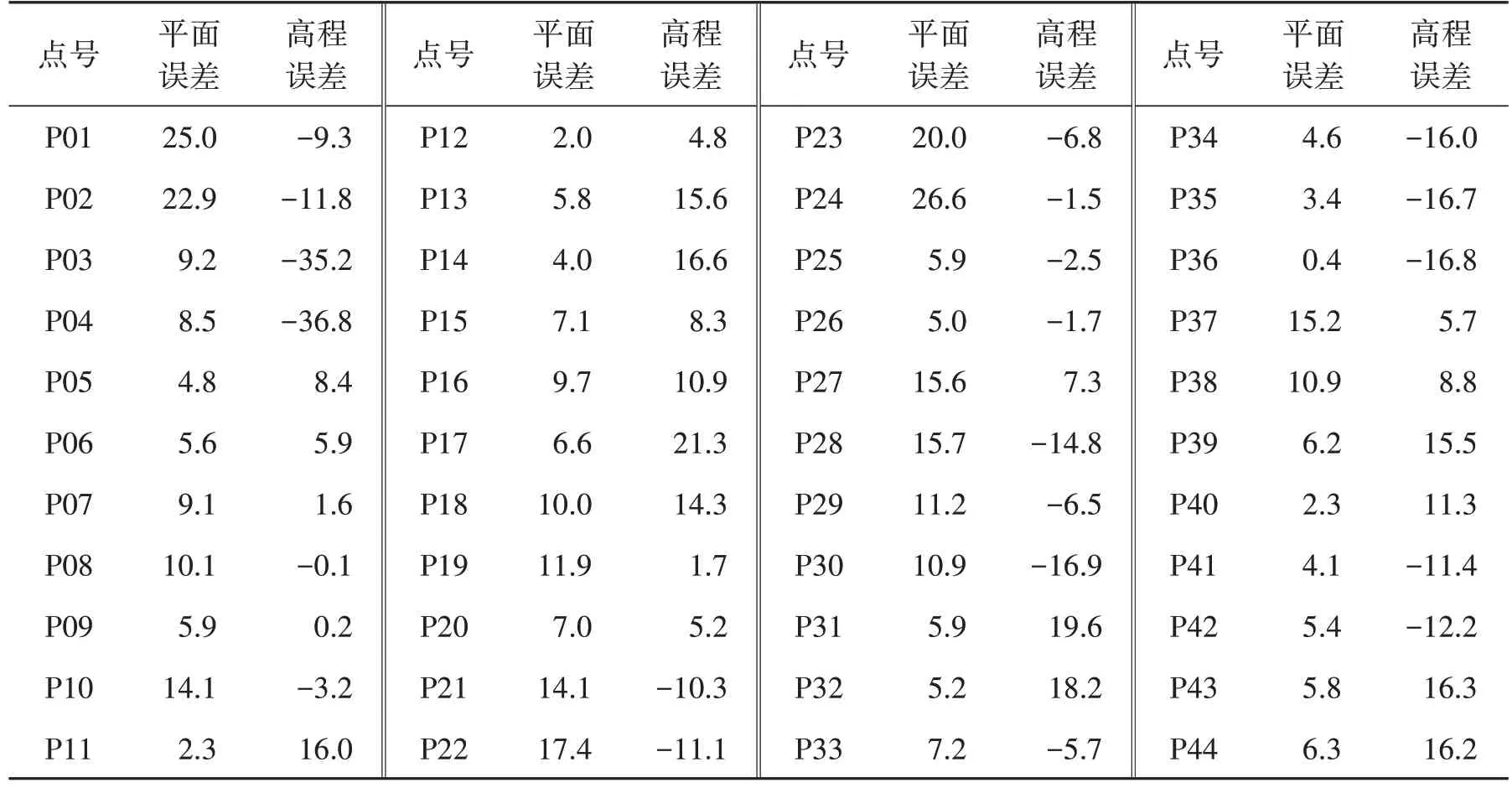
表1 仿地航摄倾斜建模精度 单位:cm
经计算,表1 最终的平面点位误差为0.092 m,高程误差为0.113 m。结果满足了《三维地理信息模型数据产品规范》(CH/T 9015—2012)I级1∶500比例尺地形图三维模型平面点位误差小于0.3 m、高程中误差小于0.5 m 的精度要求[17]。
4 结束语
针对高差显著的山地严重影响无人机获取图像质量的问题,本文采用无人机仿地航摄作为解决方案,无人机的航摄基本上同地表保持相同的高差,从而提高图像质量。本文以黔西北某水利枢纽工程作为实验区,分析和论证了无人机仿地飞行的倾斜摄影技术能够满足地形复杂、高差明显的河谷地区的三维建模精度。与传统的定高飞行设计相比,它保证了航空摄影的质量和视觉效果。推进水利数字化发展、管理和运营进程,提高后续监测和维护能力。
猜你喜欢
山东煤炭科技(2022年6期)2022-07-14
煤气与热力(2021年10期)2021-12-02
河北地质(2021年4期)2021-03-08
装饰装修天地(2020年11期)2020-07-04
中国铁道科学(2019年5期)2019-10-19
测控技术(2018年10期)2018-11-25
测绘通报(2018年10期)2018-11-02
铁道勘察(2018年5期)2018-10-22
中小企业管理与科技·下旬刊(2017年7期)2017-08-24
房地产导刊(2015年6期)2015-10-21