多波束贴近探测在海管悬空病害治理中的应用
2023-12-25 07:15杨阳
北京测绘 2023年9期
杨 阳
(中海辉固地学服务(深圳)有限公司,广东 深圳 518067)
0 引言
作为海洋石油生产的生命线,输送油、气、水等的海底管道具有效率高,输送量大,成本低等特点。由于海底管道所处的环境恶劣,受到海洋波浪、海流冲刷、潮流和海床沉积物等因素影响,海底管道出现裸露甚至悬空的赋存状态,不同程度地威胁着海洋油气的安全生产[1]。因此,对悬空海底管道的治理显得尤为重要。目前,在浅海海底管道悬空、裸露病害探测方面,船载侧扫声呐系统、浅地层剖面系统以及多波束系统应用较为广泛[2-5]。其中,船载侧扫声呐系统具有探测范围大的特点,多用于海底大范围二维地貌测绘;船载多波束系统,通过大量波束点,测量水深点云,形成三维水深点云,能够完成海床地形地貌的探测,以上两种方法受海浪、潮涌、船舶噪音等因素影响,存在精细化程度不足的弊端。船载浅地层剖面系统,通过低频声波穿透海床,能够完成浅地层结构构造探测和海底管道探测,在海底管道探测时,以一定间隔垂直于管道走向探测,存在效率低下和探测不完整的弊端。采用水下机器人(remotely operated vehicle,ROV)装载多波束测深仪探测装备,能够近距离贴近海底管道,不受海面环境影响,在探测管道方面具有探测精度高、数据质量好、作业效率高、成本低等特点[6-7]。多波束测深仪的三维测深图能够直观展示管道赋存状态。在海底管道治理探测方面能够量化真实地反映管道赋存状态,悬空管道治理后抛石范围的大小、抛石增厚值等指标,完整展示管道悬空治理的抛石效果。
1 系统构成及原理
1.1 探测系统
基于水下机器人搭载的多波束探测系统,主要包括水下机器人操作系统,多波束测深仪探测系统以及多种辅助设备。水下机器人操作系统包括:水下潜器、释放A 架和控制柜。多波束测深仪系统包括:多波束换能器、控制单元和多波束采集软件。辅助设备主要有差分全球导航卫星系统(differential global navigation satellite system,DGNSS)、深度计、高度计、声速剖面仪、表面声速仪以及超短基线水下定位系统(ultra short base line,USBL)(图1)。
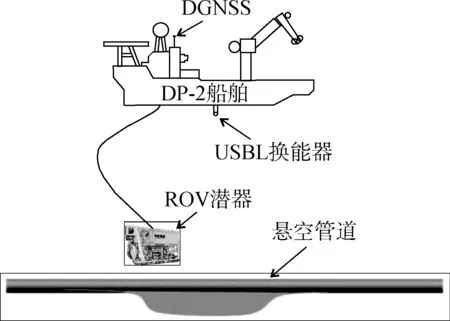
图1 ROV悬空管道探测系统示意图
1.2 技术原理
采用重型工作级水下机器人作为运动载体,搭载多波束探测设备及相关辅助设备,进行探测作业。水下潜器上安装USBL 信标,信标通过声学定位技术,测量水下潜器信标与船载USBL 换能器的相对位置关系;安装深度计,测量海水面至深度计的水压,计算深度;安装高度计,通过声学单波束,测量海床与高度计的距离;安装声速剖面仪,声速剖面仪上设计有固定距离的发射声源和反射器,海水中声源发射声波经反射器反射后被接收,由往返程时间,计算海水中声波的传输速度;安装多波束换能器,通过声学多波束,测量每个波束反射回来的声波,计算水深数据,形成三维水深点云。多波束测深仪系统采用Norbit iWBMS 多波束,该款多波束采用内置姿态惯导传感器和表面声速仪,满足多波束换能器的免校准。
2 作业过程及数据处理
2.1 作业过程
根据前期完成的管道检测资料,40 m 以上悬空有3 处,管道直径559 mm。作业船舶要求具有动力定位2级(dynamic positioning-2,DP-2),且拥有大面积的甲板,满足存放抛石石块和安装吊机。探测测线,以实际管道路由为原则布设,为船舶和水下机器人提供运动路径。作业所采用的坐标系为CGCS2000国家大地坐标系,以ITRF-97 参考框架为基准,参考历元为2 000.0。投影方式为UTM 投影,中央子午线111°E,比例因子为0.999 6,原点纬度0°(赤道),假东500 000 m,假北0 m。高精度定位为船舶提供坐标位置进行导航,超短基线水下定位系统为水下机器人提供相对位置,通过位置Offsets,计算出水下机器人参考点的坐标位置进行导航。
测量过程中,多波束参数设置为波束开角120°,等角512 波束,工作频率400 kHz,输出频率5 Hz。以实际管道路由为作业测线,水下机器人在测线正上方飞行。保持定高,以0.5 节匀速直线飞行。探测调查时,根据波束开角和水下机器人飞行高度,依据直角三角形函数计算波束的大致扫宽。当水下机器人飞行高度距离海床2 m时,平坦海床扫宽约7 m,计算公式为
式中,D为多波束扫宽;H为水下机器人飞行高度;θ为波束开角作业前,完成超短基线以及水下机器人罗经的校准,并将校准值输入到系统。根据管道检测资料,对悬空段进行抛石治理前的多波束探测,选取抛石治理点坐标位置。采用抛石袋进行抛石,水下机器人前视扫描声呐指导抛石袋抛石[8]。抛石结束后,悬空段再进行抛石治理后多波束探测。量化抛石效果是否满足抛石点基线范围5 m×5 m,石堆顶距管顶距离取0.2 m,且宽满足2 m。
2.2 数据处理
完成数据采集,采集的主要数据有深度数据、位置数据和多波束探测的水深数据等采用专业数据处理软件进行处理,数据处理流程如图2所示。量取各传感器以及多波束换能器相对于水下机器人潜器某参考点(0,0,0)的三维相对距离补偿值。测量得到的水面高精度位置数据,通过水下定位系统,定位出潜器上参考点的大地坐标,结合水下潜器的姿态补偿及相对距离补偿值反算各传感器及多波束换能器的大地坐标。航迹编辑的目的是剔除水下定位导航时位置跳点或及测量时因位置丢失而进行重复测量的航迹。水下机器人以0.5 节的速度,定高飞行2 m,探测50 m 的距离需要约3.3 min,完全覆盖该段悬空长度。水深数据的处理,因为测量时间较短,选取测量时刻的潮汐值作为水深值补偿,潮汐值是以平均海平面为参考基准面获取。利用深度数据结合水下机器人潜器的姿态变化及升沉补偿反算海床至平均海平面的水深数据。波束筛选,0.5 m 为间隔筛选波束。水下机器人搭载多波束测量时会受到水流噪声、波束散射等的影响,编辑剔除不规则噪点。以0.5 m的距离筛选波束,在数据处理软件上进行海管编辑。以波束横截面为视图,处理海管周边海床以及海管悬空起算高度。

图2 多波束数据处理流程
3 悬空病害探测实例
本文以南海某气田中心平台至登陆端海管治理中的一个治理点为例,阐述多波束探测技术在海底管道悬空治理中的应用。该气田中心平台至登陆端水深变化较大,变化范围约为0~70 m,治理点水深约42 m。海管外包裹水泥配重,直径为559 mm。悬跨长度40 m 以上的管道为危险悬跨,必须进行悬空治理[8]。采用非连续性抛石治理海底管道悬空,治理点为该悬空段中心位置[9]。首先采用3 英寸的石块进行抛石,抛石至悬空管道顶端,再用1英寸石块充填抛石。
3.1 治理前管道的悬空探测
在抛石治理前,实施悬空段海底管道多波束探测。海底管道由中心平台至登陆段走向约63°,治理悬空段水深约43 m,水流较大,海水浑浊,水下机器人视频无法看清悬空管道。治理悬空起止点为Kp0+50.333 6~Kp0+50.374 9 km(Kp0 为登陆端管道起点),悬空长度为0.041 3 km,海管底端至海管正下方自然海床的最大高度为0.60 m,平均高度为0.47 m(图3)。悬空管道沿走向方向,管道支撑起点,管道裸露部位较少,仅裸露了管道顶端位置,自然海床对该处的管道支撑很充足(Kp0+50.333 1);管道支撑终点,管道裸露较多,管道周长1/4 裸露在海床上,该处的管道也为支撑状态,支撑效果良好(Kp0+50.374 9)。该悬空段中间部位,探测波束呈不连续3段,圆形海管顶部,遮挡了探测声波,使得管道下方没有水深波束点(Kp0+50.354 3)。因为海流的冲刷作用,使得悬空管道下方出现了冲刷沟的现象[10-13]。在横截面多波束中可以看出管道附近两侧波束向管道下方倾斜,管道正下方海床与海管不接触,形成了U 形的海管管沟。管沟宽约2.55 m,深约0.69 m(图4)。管沟的大小决定了抛石方量的多少以及抛3 英寸石块和抛1 英寸石块的比例。选取悬空段中间位置作为抛石治理点[14-15],即Kp0+50.354 3。
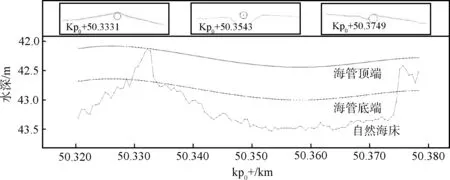
图3 治理前悬空管道纵剖面图及管道横截面图
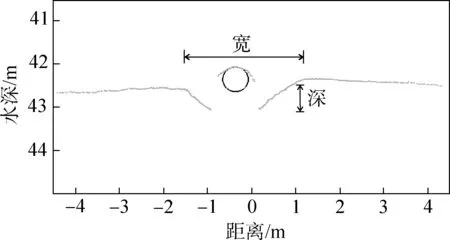
图4 悬空海管正下方冲刷管沟(Kp0+50.3543)
3.2 治理后管道的悬空探测
抛石完成后,实施悬空段海底管道治理效果的多波束探测。多波束数据处理后,直观量化治理效果见图5~图6,治理点为Kp0+50.353 0~Kp0+50.358 5,治理长度约7 m,宽约6 m。治理后,管道顶至抛石顶高等于0.2 m的地方有长5.398 m,最高0.346 m,平均0.223 m。治理段悬空管道存在的管沟完全被抛石充填,波束完全覆盖在管道上方,因抛石棱角明显,多波束探测波束出现不连续现象(Kp0+50.353 0),见图6。结合横截面波束量化的抛石宽度及抛石高度和纵截面海床与管道的相对关系,可以看出,治理效果完全满足抛石要求。

图5 治理后悬空管道横截面图(Kp0+50.3562)

图6 治理后悬空管道纵截面图及抛石起止横截面图
4 结束语
在海水能见度较低的海域,非连续性抛石治理悬空管道具有很大的随机性,对悬空管道治理后的探测技术有很高的要求。既要满足抛石治理要求,又要有治理后具有说服力的成果。采用水下机器人搭载多波束的方式,进行非连续性抛石悬空治理的探测技术,能够使多波束探测系统近距离探测海底管道,作业时间短,效率高,免受海面海况的影响。具有精细化探测,高精度量化海底管道的悬空位置、高度及长度等特点。真实反映了抛石范围、抛石距管顶高度及宽度等指标,完成悬空管道抛石治理作业。
猜你喜欢
机械工程师(2022年12期)2022-12-21
化工机械(2022年4期)2022-09-02
中国海洋大学学报(自然科学版)(2018年11期)2018-10-15
琴童(2018年2期)2018-03-06
学苑创造·A版(2017年8期)2017-06-24
中国海洋大学学报(自然科学版)(2017年7期)2017-06-05
电子制作(2016年15期)2017-01-15
海洋工程(2015年3期)2015-11-22
应用海洋学学报(2014年4期)2014-11-22
石油工程建设(2014年5期)2014-03-20