网师园“步移景异”时空感知生成机理
2023-12-21 01:18张甜甜刘滨谊冯茂桓
中国园林 2023年11期
张甜甜 刘滨谊 朱 喆 冯茂桓
苏州古典园林时空感知中,“步移景异”是普遍提及的景观感受。“步移”改变了观者所在环境的位置,产生了时间和空间的改变,由此引发了时间和空间感受的变化——“景异”。游人在园林中移动,时间与空间感受的形成主要来自视觉观察所得到的空间界面,随着视点、视角、景深、景阔的不断变化,不同的景依次展开、变换,使得园林空间具有序列性。苏州古典园林中游览路径对步移景异的感受发挥着重要作用,景在同一流线上依次变换,不同空间的属性相互对比、彼此增强[1]。已有研究成果主要集中在基于游览经验的定性分析阐释,归纳步移景异感知生成的时空含义。部分研究从定量的角度出发,聚焦于对苏州园林空间的系统性量化分析,探索视线与游览路径的错位分离如何产生步移景异感受[2],结合语义网络法与句法分析,讨论苏州园林中关键空间序列的视觉补偿效果对空间感知的影响[3],从可行空间与可视空间联动分析的角度试图揭开苏州园林的空间视觉特征。但是,以上研究在游人观者这一主体感知方面仍然薄弱,缺乏调查介入。总体上,此前研究侧重于客体空间形态特征分析,缺乏主体及主客结合的深入研究。
将景的主体感受与景的客体布局相结合,从组景设计出发,冯纪忠提出步移景异主要由总感受量、导线长度、变化幅度、时间或速度四者之间的相互关联而产生[4],从而将园林空间的主观感受与客观组成联系了起来,体现了中国“主客合一”的园林设计理念。继之,刘滨谊创立了风景旷奥度的景观空间感知评价理论,提出了“主观感知的客观表出”的思想,提出了用于大规模视觉景观资源搜索的“美感量化”模型,实现了风景园林客观环境信息与主观感受信息量化的对接转译,进而将风景园林主观感受量化由客观环境数据指示表出,实证了其所提出的“主观感受的客观表出”这一哲学命题[5]。以此类推,步移景异可以理解为由客观环境时空变化转译产生的主观感受变化,是“主客合一”的园林时间空间感受、感知、响应,即园林时空之景的感知应[6]。
对步移景异感知实行数字评价,首先需要确定“景”中可量化的组成要素,尤其是由视觉感受所得到的“景”的组成要素。本研究中,所定义的“景”的视觉空间基本要素包括:1)形成视野视线的集中出发点——景心;2)视野广度——景阔;3)视线方向与深度——景深;4)可以分解为多个场景的综合空间感受——景场[7](图1,以图2中的视点39的视觉界面为例)。当代游客在游园过程中,在兴趣点停留、拍照,选取典型照片上传至互联网平台并加以文字评论,产生海量数据。互联网大数据样本量大、公众参与度高,能够全面地反映公众的感知偏好[8],也降低了调查者个体主观引导带来的误差,同时,相较于传统的问卷与访谈,数据获取更为高效,已在风景园林感知评价领域广泛运用[9]。依据网络大数据图片点评可以获取由诸多个体归纳而来的群体感知之“景”。进一步,这些“景”由以上4个基本要素予以量化表述,从而识别出在哪些“景”之间的“步移”会产生“景异”。
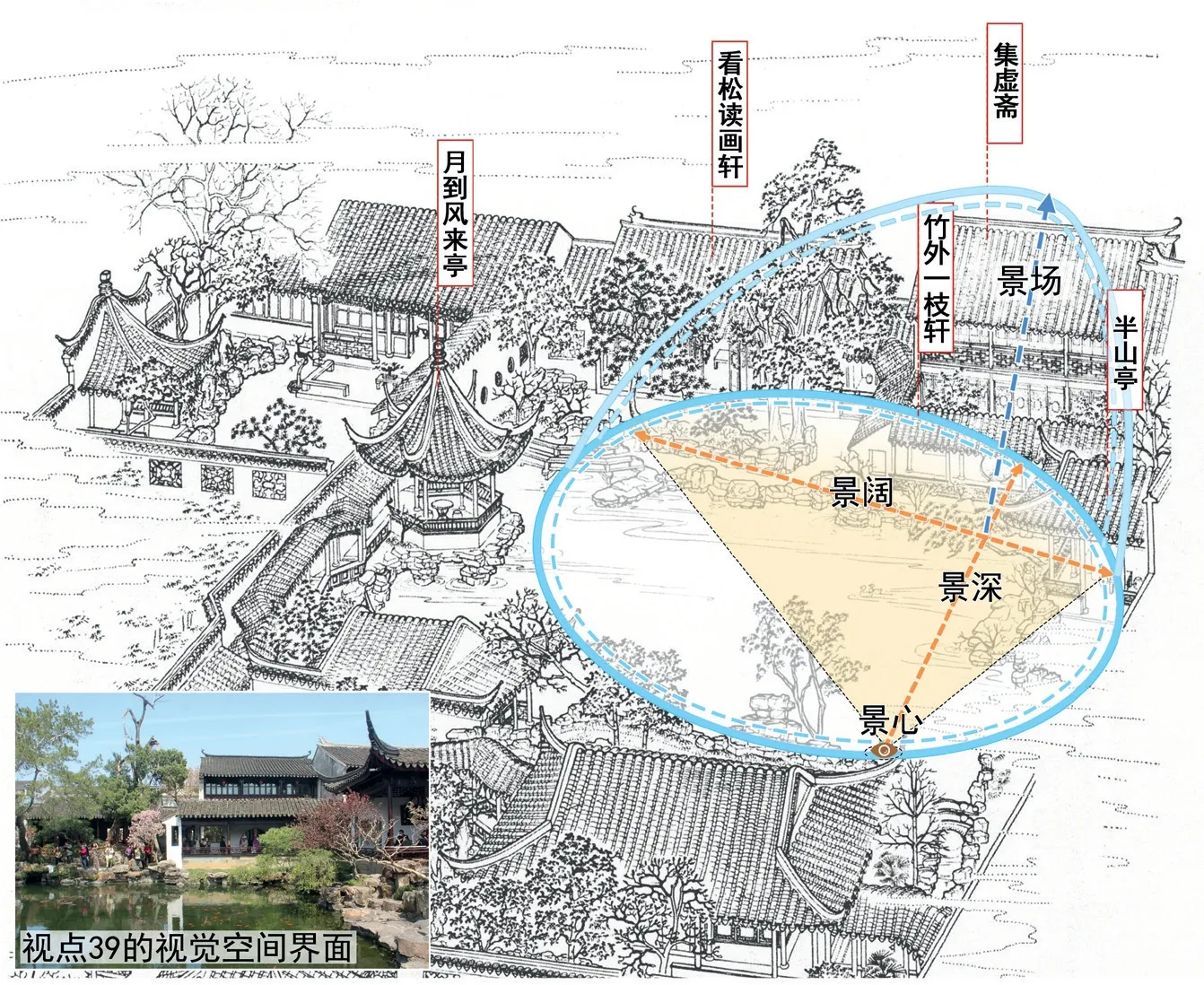
图1 视觉空间基本四要素图示(作者改绘自参考文献[16]403)

图2 网师园视点与路线(a)和视觉空间界面(b)
研究案例选取了苏州古典园林网师园,其以空间布局与理景手法雅致精妙著称,布局紧凑丰富,被陈从周喻为“小园极则”,是“以少胜多”的典范[10]。利用网络大数据挖掘公众对网师园“景”的感知表达、基于公众感知调查确定在指定的路径上哪些视点之间产生“步移景异”,即可获得主观感受的客观表出;通过图像处理与时空结构分析,确定“步移”(视点变换)与“景异”(视觉空间界面变化)相关的要素与指标。由于该指标具有多要素、多层级同时发生、相互关联的复杂性,传统研究中的打分法并不适用[11],人工智能技术在应对高强度分析与推理、准确择优与知识转化方面有高效的优势[12]。研究最后利用人工智能决策树(Decision Tree)构建网师园步移景异感知生成模型,对步移景异感知产生的时空规则进行定量解释。
1 研究方法
1.1 基于大数据的古典园林景观公众感知识别
以旅游网站上关于网师园的点评图片作为古典园林景观公众感知的代表,获取公众对于“景”的感知与表达。截至2023年3月22日,大众点评、美团、携程3个旅游网站的网师园图文评价数量分别为4 801、3 231、3 170条,共计11 202条,图片66 192张。利用八爪鱼采集器进行采集,删除内容为夜景、人物、食物、建筑室内、宣传册与标识牌、单体要素(如单块置石、家具、漏窗、植物等)特写的图片,得到表达景场的图片12 746张。
手动将相似图片分组,初步得到97组,至现场对每一组图片进行仔细筛查核对,视点接近、视觉空间相似的图片进一步精简,排除了18组重复景场。统计每一组图片的数量,较多的有月到风来亭、射鸭廊、撷秀楼山墙、濯缨水阁、引静桥等,多达数百张;较少的是轿厅北庭院、撷秀楼南庭院、瓷器馆南庭院、梯云室北庭院等35个景场,图片数量共1 176张,每组均少于50张,具有一定随机性,故将其排除,剩余44组图片。对44个视点的位置进行梳理与标注,结合现有的关于网师园游览路径的研究成果[13-14]与实地观察,确定游人的主要游赏路线(图2a)。
由于游客拍照视点与视点高度的差异,同一组内图片呈现内容有细微差别,需对同组图片进行梳理、选取典型,后至现场比照同视点、同角度固定视高(1.6m),利用高清相机为44个景场分别拍摄1张图像(图2b),确定了44个被公众感知到的“景”,将每个景的视点、视野方向与在评论中出现的次数标注于图中。
1.2 “景异”的视点分布调查
于2023年7月11—15日在网师园入口处随机邀请45名游客参加调查问卷,其中22名男性、23名女性,91.1%为15~40岁的中青年人,93.33%的受试者为第一次到访网师园,所有受试者均不具备风景园林专业背景。首先向受试者讲解步移景异的概念及调查目的,要求受试者按照图2a中标注的路线观赏,标记图中126个相邻点是否能产生步移景异。游览结束后,邀请受试者对照图片接受半结构化访谈,简单描述为什么产生或不产生步移景异。参考已有研究成果[15],超过60%的受试者标注为“是”的相邻点被认定为能够产生步移景异,其余被认为不产生步移景异,结果见图2a。
1.3 “步移”与“景异”的要素与指标拆分
从“步移”与“景异”两方面拆分时空感受:“步移”包含视点(观察点)移动的距离,即2个视点之间的实际距离(D)、可达拓扑距离(PA)等;“景异”首要考察“景”的空间这一基本元素,并以景阔(W),即景域水平空间尺度、景深(DE),即构成的景域深度,以及视觉空间各个景观要素——水体(WA)、假山与石驳岸(R)、铺地(F)、较封闭的厅堂阁馆建筑(B)、较开敞的亭与廊(P)、植物(PL)、天空(S)组成视觉空间界面的7个子要素,并以此作为判定步移景异的7个指标。实际距离(D)、景深(DE)、景阔(W)皆为实测获得;每张图片中7个子要素的占比值由像素法计算,部分结果见表1。计算可达拓扑距离(PA)首先需结合实地考察,校准网师园平面图[16]的可行范围,根据空间句法理论,可达拓扑距离用于表达相邻视点彼此到达需要进行空间转换的次数[17],利用Depthmap软件中Step Depth功能运算并取值。
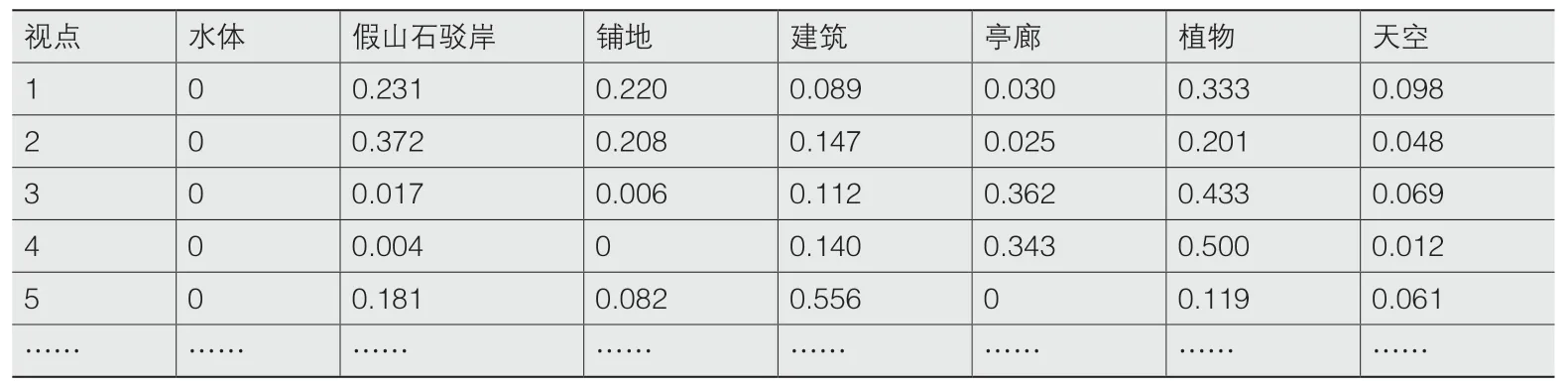
表1 各视点的视觉空间界面景观要素占比(部分)
相邻视觉空间界面需计算“景异”相关要素与指标差值的比值,以表征“异”的程度,以Δx表示,计算方式见公式(1)。由于篇幅有限,部分计算结果呈现见表2。

表2 步移景异空间感知要素与指标量化结果(部分)
式中,Δxa-b为点b到点a的x要素或指标变化比值;xb为点b的x要素值;xa为点a的x要素值。若xb=0,则Δxa-b统一取值为1。
2 结果
2.1 网师园“景”的视点分布
利用ArcGIS 10.2软件对44个景对应的11 570个视点进行核密度分析,设置搜索半径为1.5m、输出像元尺寸为(500×500)mm2,图3为分析结果与图2a叠加,环彩霞池是园中观景视点高密集区,与已有研究结果吻合[13,18]。结合图2b可知,44个“景”中有43.2%出现在彩霞池周围,其视觉空间界面多数以水体为前景,建筑和亭廊假山为中景,植物与天空为背景。

图3 视点分布核密度分析结果
2.2 步移景异感知决策树模型
决策树是一种基于“纯度”最大化逻辑算法原理对目标变量进行高效分类的机器学习模型,其结果的判定过程是一组由if-then条件组成的集合,其表现形式类似树状结构而得名。决策树构建的过程包括以下3个步骤:特征向量选择、决策树的生成及修剪。作为一种预测模型,决策树在风景园林领域分析复杂系统、大数据方面具有优势,可依据约束条件调整,生成多种可能假设,提供预测指导[19],在步移景异感知生成的模型构建中具有较强的灵活性。
最新的决策树算法为C5.0,其构建模型的准确性、降低数据噪声和处理大数据等功能相对于以往的版本有所提升,采用了信息增益率来选择能够最大化分割与集合“纯度”的特征并构建节点与分支。信息增益率基于信息增益(Information Gain),为解决因只采用信息增益而易倾向选择离散程度较大的分割点的弊端。因此其计算方式为信息增益与划分属性A固有值之比(公式2):
式中,Gain(D,A)为将数据集D以属性A划分为v个分支点后的熵与上一级节点所产生的熵差,即信息增益,见公式3:
SplitInfo(A)为划分属性A的固有值(信息量),见公式4:
式中,pk为因变量值为K的案例占所有案例的概率。
本研究利用R语言软件中的C5.0工具包构建网师园步移景异感知决策树,即步移景异感知与显著性空间要素指标进行非线性分析,建立逻辑回归模型。
1)将显著性空间要素指标,即D、PA、ΔW、ΔDE、ΔWA、ΔR、ΔF、ΔB、ΔP、ΔPL、ΔF、ΔS作为构建决策树的特征向量。
2)根据问卷结果对2点之间是否产生步移景异进行赋值,产生为Y、不产生为N。
3)126个数据样本随机分成80%训练集(100个样本)与20%测试集(26个样本)。
4)基于训练集,通过C5.0工具包运算得到步移景异感知决策树(图4),共生成7条规则,其中可以判断不利于产生步移景异的有3条,利于产生的有4条。
2点之间不利于产生步移景异(N)的规则如下。
规则1:ΔWA(水体变化比值)≤13.25%。
规则2:ΔWA>13.25%且ΔW(景阔变化比值)≤9.51%。
规则3:ΔWA>13.25%、ΔW>9.51%、PA(可达拓扑距离)≤1且ΔF(铺装占比变化比值)>31.3%、10.18%<ΔDE(景深变化比值)≤43.89%。
2点之间利于产生步移景异(Y)的规则如下。
规则4:ΔWA>13.25%、ΔW>9.51%且ΔDE>43.89%。
规则5:ΔWA>13.25%、ΔW>9.51%、ΔDE≤43.89%且PA>1。
规则6:ΔWA>13.25%、ΔW>9.51%、ΔDE≤43.89%、PA≤1且ΔF≤31.32%。
规则7:ΔWA>13.25%、ΔW>9.51%、PA≤1、ΔF>31.3%且ΔDE<10.18%。
决策树模型信息显示其错误率为11%,即判断网师园步移景异感知产生与否的准确率为89%,精准度较高。模型信息同时提供各特征向量的使用率,表征各要素指标在构建过程中的重要性,ΔWA、ΔW、ΔDE、PA、ΔF的使用率依次为100%、70%、62%、37%、25%,其他要素如实际距离、建筑、亭廊、假山、植物、天空变化比值等指标在模型构建中使用率更小。说明在网师园中游览时,视觉空间界面的水体占比变化量是决定是否产生步移景异的最主要因素,其次为景阔的变化、景深变化,最后为可达拓扑步数与铺地要素占比的变化。
5)基于测试集,利用该决策树对测试集结果进行预测,决策树的预测结果与测试集原始数据显示其准确率为73.07%,精准度为78.57%,召回率73.33%,F1值为75.86%,说明该决策树具有较好的鲁棒性与拟合度。
3 结论与讨论
3.1 结论
1)大众感知网师园的“景”主要分布于环彩霞池周围、殿春簃庭院、蹈和馆庭院与梯云室庭院等区域。
2)产生步移景异的视点分布在彩霞池周围、殿春簃庭院、蹈和馆庭院,不呈现连贯性;在彩霞池与毗邻的庭院或建筑的连接处,均可产生步移景异,如图2中的点6与7,点43与15、40等,点21与22、32、30等。
3)影响相邻视点是否产生步移景异的主要指标为视野内水体占比变化与景阔、景深、可达拓扑距离、铺地要素占比的变化。2个视点间的实际距离、建筑亭廊、天空、假山、植物、铺地等要素在视野内的变化对网师园步移景异感知的建构作用较弱。
3.2 讨论:网师园步移景异感知生成的时空机理
1)整体布局对“景”的分布与步移景异感知的影响。
有研究表明,大众游客对网师园植物、建筑具有较强的感知偏好,而对水体、假山的感知偏好较弱[22]。在研究预设中,各景观要素的占比变化可能会引发“景异”的感知。决策树结果显示,网师园水体要素变化的贡献最强,其他要素的变化对步移景异感知生成的贡献较弱,其原因可能是该园整体空间布局以唯一的水体为中心,周围的建筑、山石呈向心式布局,隔水相望的观赏方式最为普遍,彩霞池与周围建筑庭院形成鲜明的虚实对比。从毗邻的庭院进入彩霞池区域时,原本受到限制的视野空间被拓宽,视野中的水体从无到有,通常这种情况发生在庭院与水池间的连接处,可达拓扑距离不超过2,才能在短时间、小景场内引发较强的视觉空间变化刺激。以点21与22为例,从开敞的水池边转换至濯缨水阁西部的廊中,景阔急剧收缩(变化比值高达17.56),1次空间转换之间,水体消失,从明到暗,问卷调查中93.3%的游客认为点21与22产生步移景异。在向心式的景观空间布局中,主景在视野中可见、不可见及可见程度的变化对能否产生步移景异尤为关键。
已有研究讨论网师园视觉特征与时空感知时,通常综合讨论视线与路径,视角与景深,主要要素如水体、建筑与植物等的相互影响与共同作用[23-24]。本研究中决策树分析结果将影响网师园步移景异感知的各要素与指标的重要性进行了排序,突出了主景中的要素,以及景阔与景深的贡献度,与已有研究并不矛盾,即由空间形态结构变化引发的空间自身的虚实、远近、开合等变化与主景要素的变化是引发网师园步移景异的关键因素。该结果与现有的以句法理论为基础、将苏州古典园林的空间形态视为既涵盖整体性与复杂性的特征,同时强调局部与整体空间、局部与局部空间之间的空间关系[25],以及空间结构与路径的组合方式将会影响人的空间感知[26]的相关研究结果是保持一致的。苏州古典园林时空结构特征与感知评价的相关研究仍有待挖掘,向更加深入与精准的指标层面推进。
2)“景”之变化要素对步移景异感知的影响。
问卷结果显示,环主景(彩霞池)游赏时相邻2点并不连续产生步移景异。以点38与39为例,可达拓扑步数为1、水体变化比值为0.11、景阔变化为0.1、景深变化比值为0.03、建筑与驳岸的变化比值均达到0.4,有42位受试者认为不产生步移景异,其中37位受试者认为2个“景”的内容相似,月到风来亭与射鸭廊的有无变化并未引起“景异”的感受,提示受试者对建筑与叠石驳岸2个要素敏感性可能较弱。
有研究从游览路径的曲折角度阐释了梯云室南庭院至五峰书屋北庭院游览路线具有多层次的空间转换,进而产生多样的视觉景观变化[23],与本研究中点1~5均不产生步移景异的结果存在差异。推测原因,一方面,庭院中无水体,且具有一定封闭性,结合访谈结果看,46.7%的受试者认为庭院中的景主要由围墙、置石与植物组成,空间同质化程度较高,难以产生景观视觉上的差异性刺激;另一方面,这5个点之间的可达拓扑步数大多数为2或3,2点之间需要经过其他转换空间,如建筑、廊等,前一个点的记忆可能会受到干扰。因此,在组景时,两视点之间的转换与过渡要考虑方便性与复杂性的平衡;在后续研究中可以进一步对该区域的封闭性与游客感知偏好进行相关性分析。
实际距离与景阔、景深的变化比值,是研究预设中可能会具有重要性的3个要素,其中,实际距离在决策树中使用率过低而没有出现,表明其对步移景异感知生成贡献度较低。笔者推断,出现该结果可能是由于网师园规模较小,同时本试验设计选用相邻视点导致毗邻点的实际距离在一定范围内浮动,较难产生差异性。此外,景阔的变化指示视野开合变化,在决策树中贡献度仅次于水体,达到70%,与预期相符;景深的变化具有62%的贡献度,但在决策树中被0.439、0.102 2个比值分割为3段。笔者推断,景深变化贡献产生“割裂状”的原因可能与研究中取每个景场最深的视线距离为景深数值有关。已有研究中认为苏州古典园林具有“透明性”,其与视线穿过漏窗、门洞的渗透层次有关[27],但在实际视觉感知体验中,景深可以细分为实景深与虚景深,虚实景深的对比度与视觉中心的鲜明度成正比[18],且视线的渗透区域可能并非均衡,最深的视线不一定出现在观察者的聚焦范围中,导致本研究的景深统计存在误差。
总的来说,决策树结果能够更加直观具体地体现“景”的要素变化如何影响步移景异感知的生成,确定了空间形态结构变化引发的景阔、景深的变化,以及主景区的主元素是引发网师园步移景异的关键,而不同景观要素组合、景场内的占比,以及其变化如何引起“景异”的感受及哪些要素占据主要作用等关键问题仍有待探索。
4 结语
中国古典园林的“步移景异”涉及客观时空结构、主观景观视觉感知,是主客合一引发的感知体验。不同于以往阐释性的空间梳理与主观分析,本研究拆分构成“步移”与“景异”的要素与指标,综合利用大数据、调查问卷、机器学习等方法探索网师园步移景异感知生成规则,据此取得的初步结果仅为开端,有待扩展深入。首先,公众对古典园林不同要素、不同类型组合方式的感知偏好有待明确,研究可以进一步细分对比景场内相同要素的占比差异如何引起“景异”的感知,目前,该假设难以在设定路线下由受试者在现场完成,有赖于引入虚拟现实技术,以便于不同景场的自由切换;其次,对景观空间视觉界面的注视焦点及两点之间视线角度的变化有待精准计量,未来可用眼动仪追踪来获取更加精确的数据;最后,将该研究方法拓展应用于其他苏州古典园林中进行横向比较,以获取更加普适性的结果。
总之,研究步移景异的目标是寻找规律:在有限的景观时间空间中,让景观感受量的获得最大化,创造园林美感。步移景异是动态而连续的在游览过程所产生的景观时空体验,它是动态景观的典型代表,由静态景观走向动态景观,这既是中国古典园林的领先开创,更是未来世界景观感受领域有待突破的前沿。
注:文中图片除注明外,均由作者绘制。
猜你喜欢
成都信息工程大学学报(2021年4期)2021-11-22
现代装饰(2020年6期)2020-06-22
河南电力(2016年5期)2016-02-06
美与时代·城市版(2015年10期)2015-05-30
新闻前哨(2015年2期)2015-03-11
中国水利(2015年5期)2015-02-28
数码摄影(2009年8期)2009-10-14
中国校外教育(上旬)(2009年6期)2009-08-04
电影评介(2009年9期)2009-05-13
文教资料(2009年35期)2009-04-13