
喷气织机打纬机构用共轭凸轮设计
2023-12-18 05:55高玉刚吴海艳赵付斌
纺织器材 2023年6期
高玉刚,吴海艳,赵付斌
(青岛天一红旗纺机集团有限公司,山东 青岛 266400)
1 喷气织机打纬机构的发展及问题
1.1 四连杆和六连杆打纬机构
喷气织机作为智能高效的环境友好型织造设备,近年来发展迅速。国内喷气织机基本参照津田驹和丰田的连杆打纬机构,这种机构制造方便、成本较低,能满足大多数纺织用户织机产品需求。
其中,四连杆打纬机构打纬力相对较小,难以适应较大打纬力、高难度织物的织造需求,适用于高速窄幅织机;六连杆打纬机构打纬力加大,但其打纬间隙易产生筘晃动问题,仅适用于低速宽幅织机。这是因为六连杆打纬机构曲轴与牵手连杆采用滑动轴承连接的轴瓦结构,该结构在高负荷状态下磨损严重,因此六连杆打纬机构的打纬速度一般控制为不大于700 r/min。
1.2 共轭凸轮打纬机构
欧洲制造的喷气织机如毕佳诺织机、意达织机,主要采用共轭凸轮打纬机构。共轭凸轮打纬机构采用滚轮与凸轮预压紧力的方法,使滚轮与凸轮表面始终接触,是一种滚动接触、不易磨损。共轭凸轮打纬机构可提供较大打纬力,消除打纬机构的连接间隙,布面不易出现横档,可用于织造难度较大的高档织物。因其零件制造精度和耐疲劳强度要求高,故共轭凸轮打纬机构制造难度大、成本高;为了保证凸轮、滚轮以及轴承等具有良好的润滑和降温效果,通常采用高压油泵进行积极式循环润滑方式。
日本津田驹推出的ZAX-NEO-001型共轭凸轮打纬喷气织机,因未采取积极式强制润滑,箱体温度较高,其可靠性尚未得到市场有效验证。国内有喷气织机制造企业参考欧洲机型研制共轭凸轮打纬喷气织机,高速生产时振动较大、使用效果不理想,分析认为可能是制造精度不足或设计存在问题导致。
1.3 需要解决的问题
通过分析毕佳诺、意达、津田驹织机的打纬动作,发现它们的运动曲线图并不相同,以在打纬后死心停留角度(又称“后死心静止角”)为例进行说明。织机主轴旋转1周为360°,欧洲织机在打纬后死心停留角度约为200°,且有轻微的主动摆动,而日系织机约为110°且无主动摆动。这是因为共轭凸轮打纬机构设计的指导思想是织机在打纬后死心停留时间稍长,可在满足引纬时间的同时减小打纬行程。连杆打纬机构打纬后死心与前死心的摆动角度约为23°,而共轭凸轮打纬后死心与前死心的摆动角度减小到19°。
根据国产喷气织机制造现状,笔者提出一种共轭凸轮打纬机构解决方案,以满足纺织企业对不同幅宽、不同车速喷气织机的需求。
2 共轭凸轮外形及曲线设计
在凸轮设计软件中,输入共轭凸轮和摆臂的位置关系、摆臂臂长、起始角度、终止角度等参数,选择运动曲线图,软件自动生成主动凸轮、从动凸轮的型面轮廓;通过凸轮型面数据可同步输出用于加工或建模的三维模型,通过软件的“图标工具”可方便地查看位移、速度、加速度、急跳(跃度)、压力角等参数的变化曲线,用于机械性能分析。织机共轭凸轮位置关系示意见图1,运动曲线见图2。由于软件自身原因,图2中位移曲线的180°~360°曲线应上移与0°~180°的曲线连续起来。
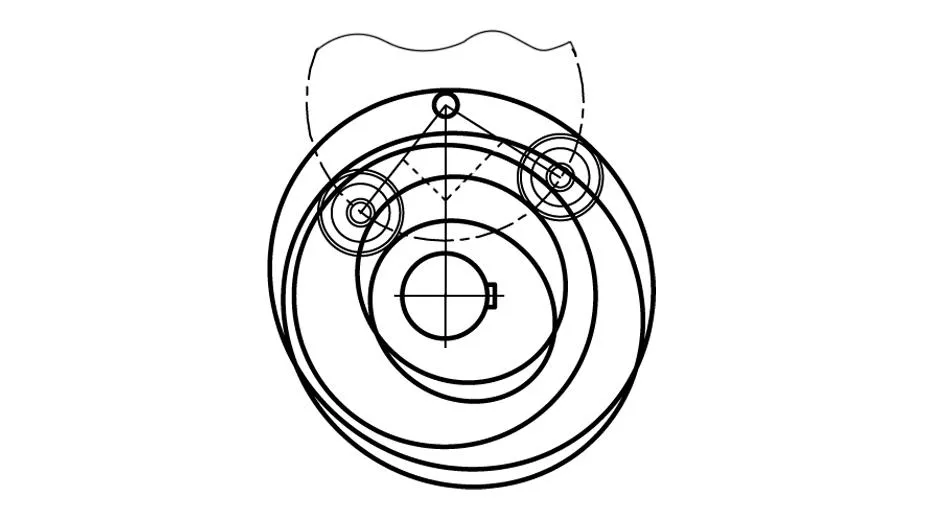
图1 共轭凸轮位置关系示意
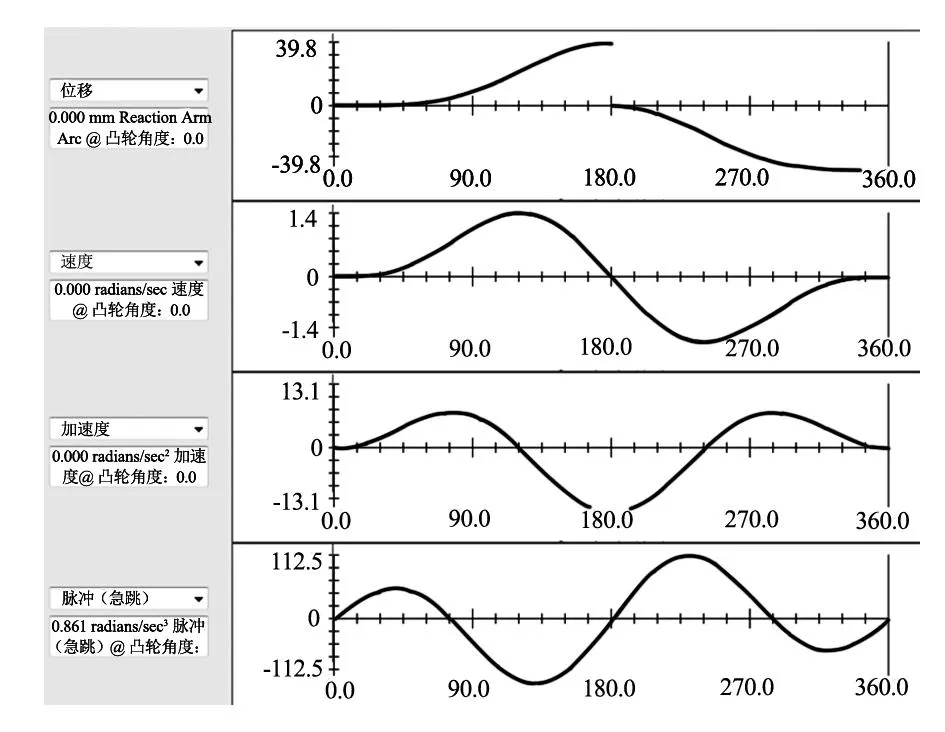
图2 共轭凸轮运动曲线
由图2可知,共轭凸轮的运动曲线顺滑,是较为理想的运动曲线图,其对应的共轭凸轮机械性能介于四连杆和六连杆之间,后死心静止角约为65°,可用于高速窄幅织机。
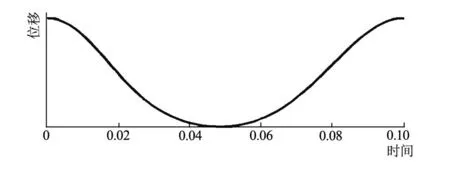
笔者利用生成的共轭凸轮,通过凸轮设计软件进行运动分析,得出其运动曲线,并与四连杆、六连杆打纬机构进行对比,具体见图3~图5。
a) 四连杆
b) 六连杆

c) 共轭凸轮图3 不同打纬机构位移曲线对比

a) 四连杆

b) 六连杆

c) 共轭凸轮图4 不同打纬机构速度曲线对比

a) 四连杆

b) 六连杆

c) 共轭凸轮图5 不同打纬机构加速度曲线对比
从图3~图5也可以看出,共轭凸轮曲线图流畅顺滑、无突变情况,适合高速运转,可用于高速窄幅喷气织机。
3 后死心停留时间较长的共轭凸轮设计及分析
在宽幅喷气织机上,期望在后死心得到更大角度的停留,以得到更多的引纬时间和更大的打纬力,其相关运动曲线图也可通过凸轮设计软件得到[1]。
3.1 后死心完全静止的大静止角凸轮
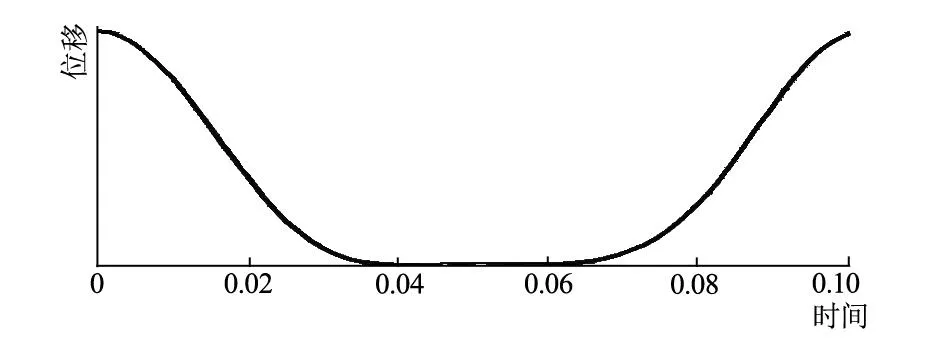
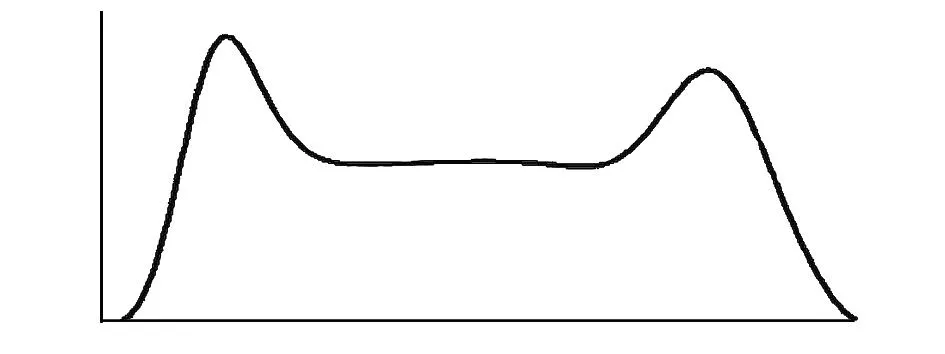
后死心完全静止的大静止角凸轮运动曲线示意如图6所示。由于软件自身原因,图6位移曲线中180°~270°的曲线应上移与其他部分顺滑连接。根据其生成凸轮后运动模拟得到的加速度曲线和急跳(跃度)曲线,见图7和图8。

图6 后死心完全静止的大静止角凸轮运动曲线
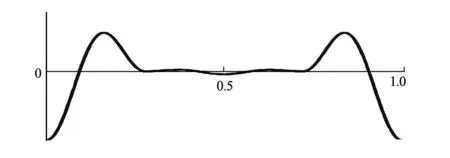
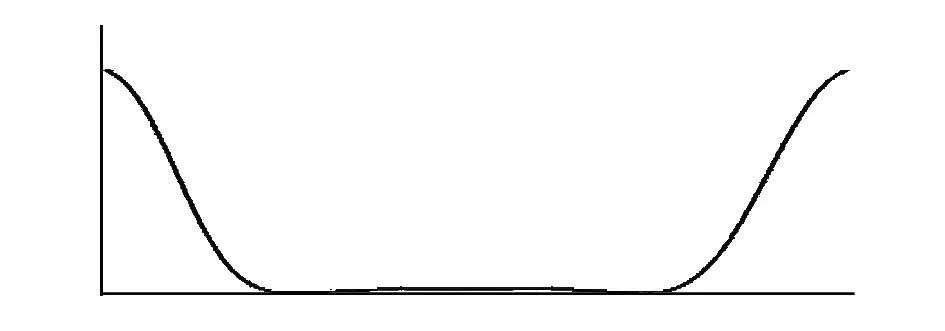
图7 后死心完全静止的大静止角凸轮加速度曲线

图8 后死心完全静止的大静止角凸轮急跳(跃度)曲线
从图6的位移曲线可以看出,后死心完全静止的大静止角凸轮静止时间达到200°,图7的加速度在后死心位置几乎完全静止,而图8的急跳(跃度)曲线中有尖角出现,设备运转时会出现轻微的抖动问题。
3.2 后死心主动摆动的大静止角凸轮
为解决后死心完全静止的大静止角凸轮存在抖动的问题,利用凸轮设计软件设计时,在后死心相对静止的角度里设置小位移的回摆[2],使凸轮进行主动摆动,可减少筘等打纬部件抖动。后死心主动回摆凸轮的运动曲线示例见图9。

图9 后死心主动回摆凸轮的运动曲线
为保证运动曲线图顺滑,在后死心摆动约0.4°时,后死心静止角以155°为宜。如果再加大静止角,则需要加大后死心相对摆动量。据此生成凸轮后的加速度曲线和急跳(跃度)曲线,见图10和图11。

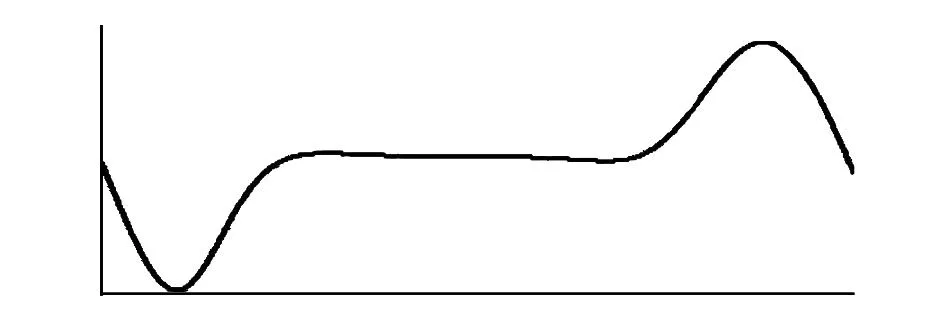
图10 后死心主动回摆凸轮加速度曲线
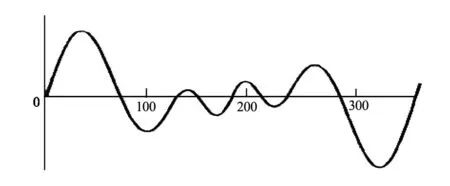
图11 后死心主动回摆凸轮急跳(跃度)曲线
从图10~图11可以看出,死心主动回摆凸轮打纬部分在织机运转1圈内出现了4次升降变化,与连杆打纬相比增加了1倍,所以其高速运转性能比连杆打纬机构差。
4 参照连杆打纬设计共轭凸轮
在套用现有运动规律无法满足高速织机运转需求的情况下,笔者经过多次试验[3-4],寻找到另一条设计路线,并得到较为满意的结果,设计思路如下。
a) 对连杆机构进行运动模拟,设计在摇杆上的共轭凸轮机构的转子随摇杆摆动,形成转子中心的轨迹曲线图。
b) 通过轨迹曲线图得到凸轮型面的样条曲线图。
c) 将样条曲线图转换成若干点,提取这些点的坐标数据到文档文件,用于加工和再次三维建模。
将利用坐标数据建好的三维模型在共轭凸轮机构中重新验证,确定其共轭精度在0.01 mm以内,能够满足制造需要,且重新建模后模拟的共轭凸轮打纬运动曲线与连杆机构相同。
喷气织机常用的六连杆打纬机构,可以视为2个相连的四连杆机构。六连杆打纬机构之所以相对四连杆机构有较大的静止角,是因为第2个四连杆的中间连杆(又称第2个牵手)与中间摆臂(第1个四连杆的从动杆,也是第2个四连杆的主动杆)的夹角接近180°,中间摆臂的摆动位移对于第2个四连杆的从动杆(也就是打纬的摇杆)推动位移作用较小,所以打纬摇杆呈较大的静止角;当机构设计在运动中出现夹角大于180°的情况时,打纬机构在后死心就会出现主动晃动问题。如果想在不增大晃动位移量的条件下得到更大的静止角,则可在六连杆的基础上再增加1套四连杆结构形成八连杆机构,通过其得到后死心停留时间更长、并有轻微主动晃动的共轭凸轮。
仿八连杆共轭凸轮打纬的运动曲线见图12。
a) 位移曲线
b) 速度曲线
c) 加速度曲线

d) 急跳(跃度)曲线图12 仿八连杆共轭凸轮的打纬运动曲线
从图12运动曲线可看出,打纬运动在后死心位置已经出现了约200°的静止角,与欧洲喷气织机打纬运动规律基本相同;打纬运动的加速度在织机运转1圈内出现了2次升降变化,且加速度变化的跃度曲线非常顺滑,接近连杆机构打纬曲线,高速运转性能良好。
5 结语
笔者利用凸轮设计软件设计的共轭凸轮曲线流畅顺滑、无突变情况,适合高速运转,可用在高速窄幅喷气织机上。其中,后死心完全静止的大静止角凸轮设备运转时会出现轻微抖动;后死心主动摆动凸轮的大静止角凸轮打纬机构,在织机运转1圈中出现了4次升降变化,高速运转性能比连杆打纬机构差;仿八连杆共轭凸轮打纬机构,在后死心位置已经出现了约200°的静止角,打纬运动的加速度在织机运转1圈内出现了2次升降变化,且加速度变化的跃度曲线顺滑,接近连杆机构打纬,高速运转性能良好。
猜你喜欢
数学物理学报(2022年1期)2022-03-16
数学物理学报(2021年6期)2021-12-21
河北理科教学研究(2020年1期)2020-07-24
应用数学(2020年2期)2020-06-24
纺织科学研究(2017年4期)2017-05-17
纺织科学研究(2017年1期)2017-05-17
小布老虎(2016年10期)2016-12-01
现代工业经济和信息化(2016年12期)2016-05-17
化纤与纺织技术(2015年1期)2015-12-26
作文大王·低年级(2015年9期)2015-05-30
