基于声呐浮标的水声信号采集系统设计
2023-12-18 05:53程思源孙辰奇
电子设计工程 2023年24期
程思源,齐 华,郑 琨,孙辰奇
(1.西安工业大学电子信息工程学院,陕西西安 710021;2.西北工业大学航海学院,陕西西安 710068;3.广西师范大学计算机科学与信息工程学院,广西桂林 541006)
自21 世纪以来,世界各国因海洋主权问题引起的争端愈演愈烈,海洋资源对于一个国家的经济发展和战略地位至关重要,因此海洋资源的开发与研究成为了各个国家关注的重点。
该文基于浮标平台设计并实现了一款水声信号采集系统。该系统以高性能STM32 芯片[1-2]为核心,实现了高稳定性的数据采集、传输和控制功能,提高了水声采集系统的实时性和可靠性;该系统具有上位机,将采集系统与物联网技术结合在一起,实现了实时监测采集数据和实时控制采集系统状态的功能。该文设计的水声信号采集系统采集数据质量高、信号干扰小,同时采集过程可控,采集效率和时效性得到了提升。
1 系统整体方案设计
水声信号采集系统的主控芯片采用意法半导体公司的STM32F407ZGT6 芯片,系统设计框图如图1所示。系统主要由四通道水听器、微弱信号预处理模块、水声信号采集系统主控芯片、电源供电模块、网络通信模块和上位机构成。系统在工作时,首先将水听器接收到的差分模拟水声信号,经过微弱信号预处理模块中的放大、滤波和A/D 模数转换装置进行采集处理[3-6],最终将A/D 模数转换后的数字信号传输至水声信号采集系统的主控芯片中;系统通过网络通信模块与上位机进行以太网通信,在本地上位机实现远程实时检测与远程系统管理控制的功能。

图1 水声信号采集系统总框图
2 系统硬件设计
系统硬件设计主要包括电源供电模块设计、微弱信号预处理模块设计和网络通信模块设计。
2.1 电源供电模块设计
考虑到系统中各个模块供电电压的多样性,为保证系统在水下未知环境下能正常工作,该系统采用DC 24 V 的基准电压,首先采用两片TPS5430 芯片设计24 V 电源稳压降压电路,产生+12 V 和-12 V为微弱信号预处理模块中运算放大器进行供电,原理图如图2 所示;其次采用MP2359 芯片以及AMS1117-3.3芯片[7]对+12 V电压进行处理,输出5 V、3.3 V 主要为A/D 模数转换芯片、水声信号采集主控芯片、网络通信模块进行供电。原理图如图3 所示。

图2 DC 24 V转+12 V与-12 V原理图
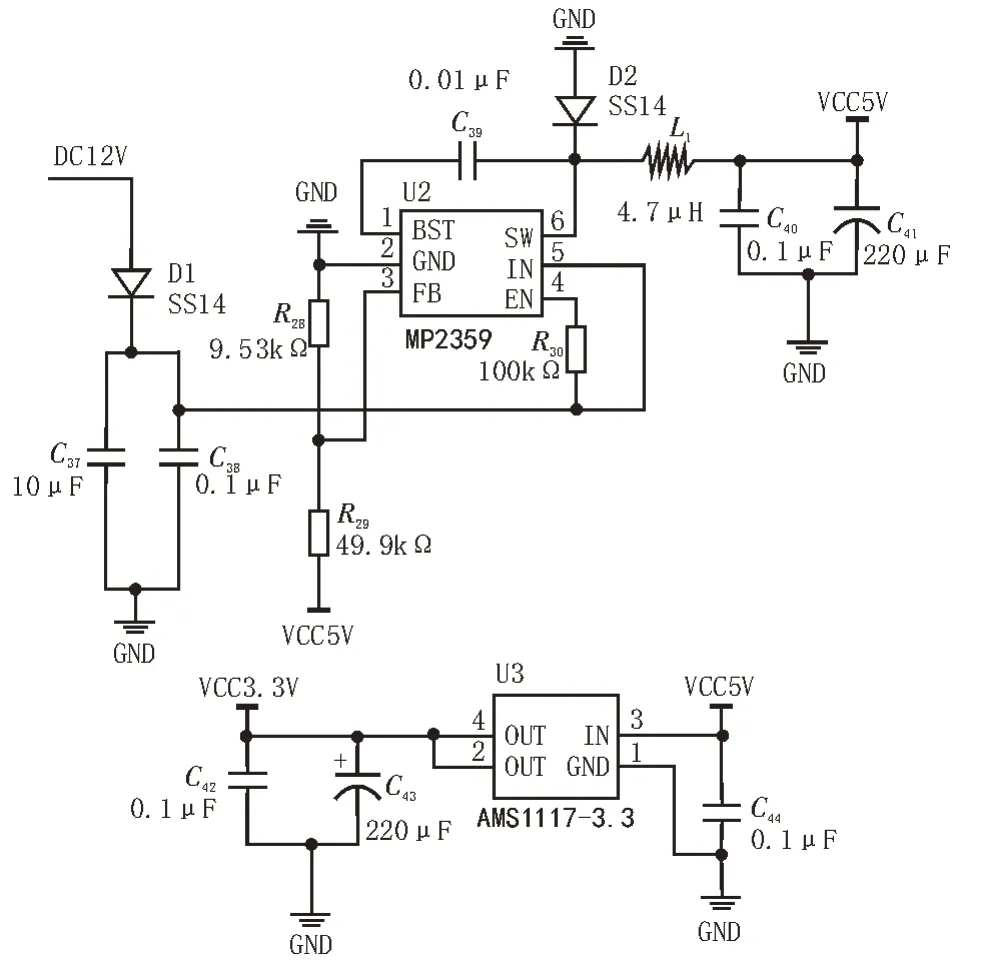
图3 +12 V转5 V、3.3 V原理图
2.2 微弱信号预处理模块设计
水听器接收到的信号一般为微伏级模拟信号,为了保证水声采集数据的有效性,需要对四通道水听器采集信号进行预处理,并要求尽可能控制微弱水声信号幅度相位相对稳定。微弱信号预处理结构框图如图4 所示,该模块主要由前置放大模块、多级可控放大模块、滤波模块与A/D 模数转换模块组成。

图4 微弱信号预处理结构框图
2.2.1 前置放大模块
该部分设计采用高精度、低噪声运算放大器,对水听器输出信号进行耦合并放大。前置放大电路输入的一般是电压量级为10-6V 的模拟微弱小信号,经过前置放大模块[8]进行100 倍的固定增益放大,满足小信号的耦合传输需求。原理图如图5 所示。

图5 前置放大模块原理图
2.2.2 多级可控放大模块
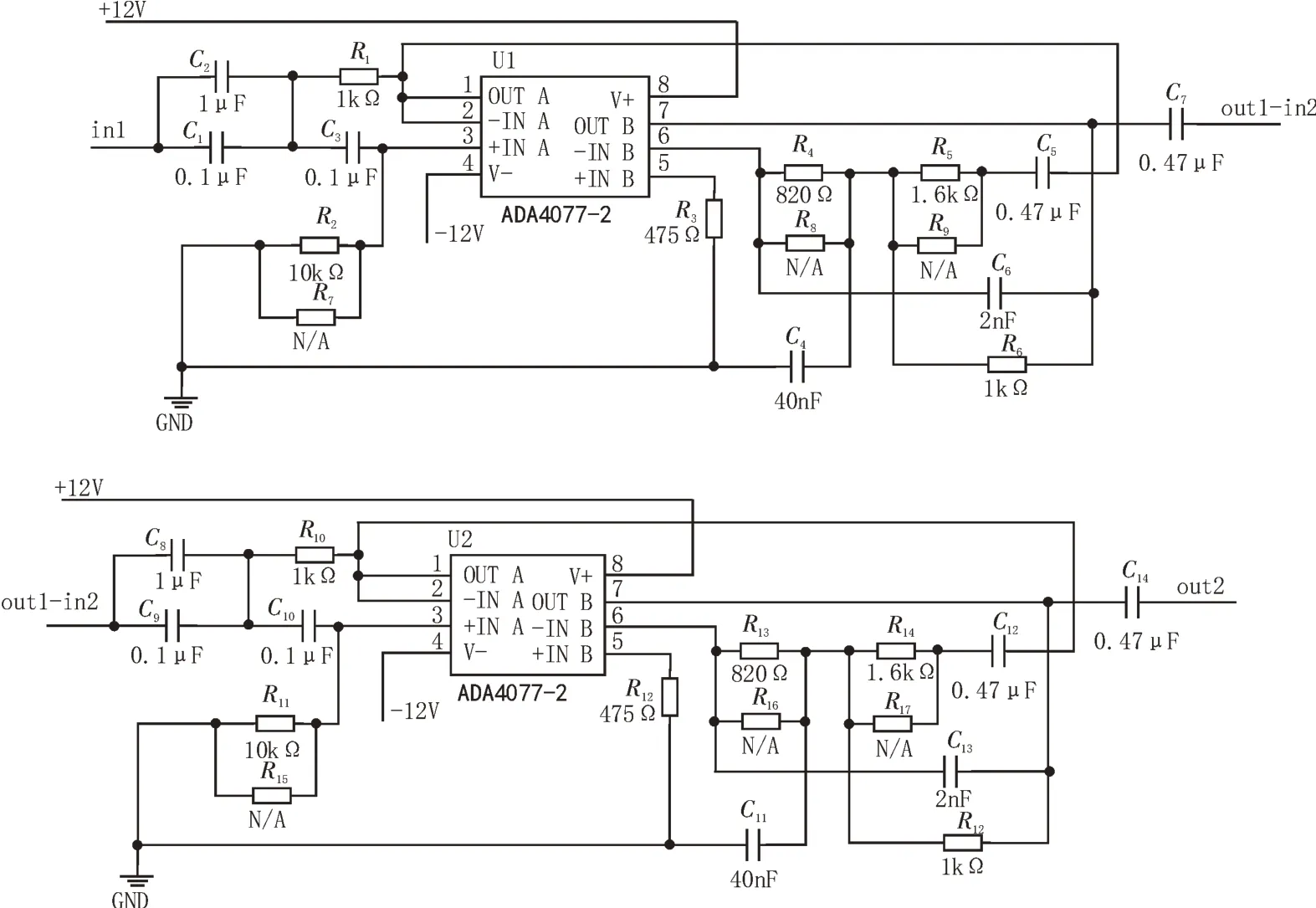
该系统多级可控放大模块由四片ADA4077 芯片构成,其中第一个和第二个运算放大模块分别设计为20 dB 的固定增益,由外围的输入电阻和反馈电阻构成放大电路;第三个和第四个运算放大模块分别设计为增益不低于20 dB 的增益可调模块[9],其输入电阻的阻值固定,反馈电阻使用数字电位计,由主控芯片控制实现增益可调。固定放大模块原理图如图6 所示。
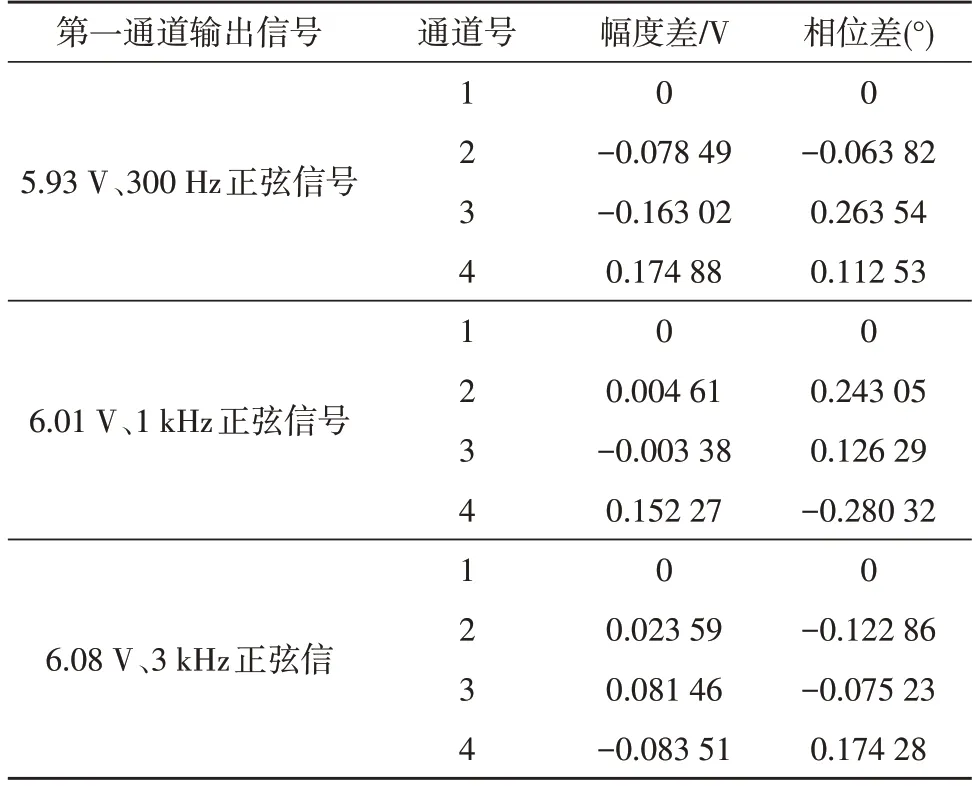
可控放大模块放大增益主要由数字电位计控制,数字电位计RC相当于可以由主控芯片发送的程序指令控制档位的滑动变阻器[10],位于放大电路的反馈电阻部分,和放大电路的输入电阻R构成反相放大器,其放大倍数表示为G=-RCR(负号表示信号的相位翻转180°)。通过调整二者的比例关系,可以实现对模拟信号的放大或者衰减,当RC>R时,|G|>0,可以实现信号放大;当RC 图7 可控放大模块原理图 根据上述前置放大模块与多级可控放大模块描述可知,最终该系统理论固定放大增益为80 dB,动态可控增益范围为40 dB,最大放大增益为120 dB。满足对微伏量级水声小信号的放大处理要求。 2.2.3 滤波模块 由于水声信号的频率范围很宽,从水声采集系统的使用角度来说,100 Hz 到20 kHz 的信号都在采集处理的频带范围之内。该系统滤波模块设计为运放同相输入端与RC 滤波器[11-12]结合,采用两个二阶高通有源滤波器和两个二阶低通有源滤波器级联构成的带通滤波器电路,其中高通滤波器主要滤除水听器接收到的低频噪声和电源引入的工频干扰,低通滤波器主要滤除PCB 板内的高频数字信号干扰,滤波模块原理图如图8 所示。 图8 滤波电路模块原理图 2.2.4 A/D模数转换模块设计 该系统采用AD7768-4 芯片作为A/D 模数转换器[13-14],芯片分辨率为24 bit,默认采样频率为128 kHz,采样率调节范围为64~256 kHz。根据采样定理与实际工程需求,设计A/D 采样频率必须大于或等于60 kHz,该A/D 采样频率范围满足要求,且在默认频率下信号输入带宽为55.4 kHz,满足声呐信号采集通频带大小要求。A/D 转换芯片输入范围0~10 V,满足接收来自微弱信号预处理模块的最终输出信号。 水声信号采集系统主控芯片内部自带以太网媒体接入控制器(MAC)[15],底层物理层组成缺少物理接口收发器(PHY),因此该系统采用LAN8720 芯片作为PHY。LAN8720 芯片首先采用RMII 接口方式与主控芯片进行连接,其次连接一个RJ45 接口用于与上位机进行以太网通信。原理图如图9 所示。 图9 网络通信模块原理图 该系统以太网通信带宽设计为10 Mbps,满足以太网通信带宽大于四通道水声信号同步数据传输带宽的工程设计要求。 系统软件设计主要包含水声采集主控软件设计和上位机软件设计。 水声信号采集主控软件设计的主要功能是采集水声信号,将水声信号的采集数据通过以太网打包发送至上位机,并且响应上位机下发的控制命令。具体流程框图如图10 所示。首先对系统进行初始化操作,各个系统模块上电;其次水声信号采集主控芯片采集并接收到来自水听器经过微弱信号预处理模块处理后的水声数据;然后将水声数据通过以太网打包上传至上位机,上位机根据实际情况对主控系统进行控制,若主控系统接收到控制命令则根据上位机最新控制命令改变主控系统状态;若未接收控制命令,则主控系统继续工作;最后采集板断电,系统结束工作。 图10 水声信号采集主控软件流程图 该设计采用VS2017(Microsoft Visual Studio 2017)软件开发平台进行上位机设计,采用基于WIN32 的MFC 窗口应用程序,使用了较多控件来实现该设计的要求。该软件主要具有数据接收处理[16]与控制采集系统的功能。上位机软件设计流程图如图11 所示,首先上位机软件初始化;然后上位机开始接收由主控系统上传的水声数据,通过对水声信号数据的实时处理与分析,对水声信号采集系统进行控制状态调整,向采集系统下发控制命令。 图11 上位机软件流程图 多级可控放大测试方式是先确定多级可控放大模块的放大倍数,使用电脑通过JTAG 仿真器向单片机发送相应的增益指令,改变数字电位计的电阻值,然后将电路接入信号发生器和示波器测量此时的实际放大倍数,并与理论值进行对比。通过实验测试,实测固定放大增益为80.5 dB,动态可控增益范围为40.7 dB,系统最大增益为121.2 dB,满足多级可控放大模块性能设计需求[17]。 对10 Hz 至30 kHz 信号频率进行测量,记录多次测量结果并绘制频响特性曲线,多个频率输出幅度增益表与频响曲线如图12 所示,实测结果符合设计要求。 图12 滤波电路模块实测频响曲线 通道一致性采用的测试方法是使用信号发送器同时对四个通道信号预处理模块输入相同频率和幅度的正弦信号,待水声采集系统正常工作后分别采用示波器与相位计测量四个通道输出信号的幅度与相位。以第一通道输出信号作为参考信号,对比计算出其他三个通道的幅度差与相位差。为了更好地验证通道一致性,采用三种不同频率的正弦输入信号进行测试,测试结果如表1 所示。 表1 通道一致性测试结果 由测量结果可知,四路通道的幅度差可以控制在±0.2 V 内,即幅度误差率为±2.5%。相位差可以控制在±0.3°内,满足各通道相位误差小于等于±0.5°的工程应用要求。 该文设计并实现了一种基于以太网数据传输、以STM32F407ZGT6 单片机为主控的四通道水声信号采集系统。通过实验测试证明,该系统能够实现对水声信号的采集预处理和监测控制功能。该系统设计成本低、操作简易,在海洋信息采集领域具有极强的参考价值与通用性。进一步研究表明,在采集系统与以太网通信技术结合后,系统设计的灵活性得到提高,系统功能更加全面。
2.3 网络通信模块设计

3 系统软件设计
3.1 水声信号采集主控软件设计

3.2 上位机软件设计

4 实验测试
4.1 多级可控放大测试
4.2 滤波特性测试

4.3 通道一致性测试
5 结论
猜你喜欢
科学咨询(2020年53期)2020-03-19
商品与质量(2019年22期)2019-11-29
科学导报·学术(2019年44期)2019-09-10
车迷(2018年12期)2018-07-26
电子制作(2017年22期)2017-02-02
电子制作(2017年19期)2017-02-02
中国老区建设(2016年3期)2017-01-15
山东工业技术(2016年15期)2016-12-01
系统工程与电子技术(2016年7期)2016-08-21
学习月刊(2015年3期)2015-07-09