
小型便携式水下机器人侧扫声呐的流线型优化分析
2023-12-17 13:40刘进谭华苏亮仇国际刘睿罗崇鑫王宇刘豪
山东科学 2023年6期
刘进 谭华 苏亮 仇国际 刘睿 罗崇鑫 王宇 刘豪
摘要:以某一挂载侧扫声呐的小型便携式自主水下机器人(AUV)为原型,对挂载侧扫声呐的AUV及挂载改进流线型侧扫声呐的AUV进行水动力分析。发现改进流线型侧扫声呐的AUV在正常航速3 kn和高航速6 kn下,得到了有效的阻力改善,包括黏性阻力和压差阻力的降低。在航速3 kn时,黏性阻力降低了9%,压差阻力降低了18%,总阻力降低了15.4%;在航速6 kn时,黏性阻力降低了4.2%,压差阻力降低了12%,总阻力降低了10.1%。这些结果表明,通过优化AUV挂载侧扫声呐的流线型,可以有效地提高AUV的动力性能,降低其阻力,从而提高AUV的性能和效率。
关键词:自主水下机器人;侧扫声呐;流线型;压差阻力;黏性阻力;动力性能
中图分类号:TH138 文献标志码:A 文章编号:1002-4026(2023)06-0008-07
Streamline optimization analysis of side-scan sonar on small
autonomous underwater vehicle
LIU Jin1,TAN Hua1,2*,SU Liang1,QIU Guoji1,LIU Rui1,LUO Chongxin1,WANG Yu1,LIU Hao1
(1.Qingdao Gosci Technology Group ,Qingdao 266237,China;2.Qingdao Gosci Intelligent
Equipment Technology Co.,Ltd., Qingdao 266237, China)
Abstract∶Water dynamics analysis was conducted on a compact and portable autonomous underwater vehicle(AUV) with side-scan sonar and amodified AUV with streamlined side-scan sonar. The analysis focused on examining the drag forces experienced by both AUVs at different speeds. The results demonstrated that the streamlined side-scan sonar effectively reduced pressure and viscous drag forces, resulting in an overall drag reduction of 15.4% at a normal speed of 3 knots, with a 9% reduction in viscous drag and an 18% reduction in pressure drag.At a high speed of 6 knots, the overall drag was reduced by 10.1%, with a 4.2% reduction in viscous drag and a 12% reduction in pressure drag. These findings demonstrate that optimizing the streamlined design of the AUV with side-scan sonar can effectively enhance the dynamic performance of the AUV, reduce its drag force, and improve its efficiency and performance.
Key words∶autonomous underwater vehicle; side-scan sonar; streamlined; viscous drag; pressure drag; dynamic performance
隨着全球经济的发展和人口的增长,对海洋资源的需求越来越大,而小型便携式自主水下机器人(autonomous underwater vehicle,AUV)具有在海洋深处进行探测和勘测、收集数据和样本、执行维护和修复任务等多种功能[1]。相比于传统的海洋勘测方法,它具有体积小、操作灵活、无需船只支持等优势,大大提高了海洋资源的研究效率和成本效益。因此,AUV作为研究和开发海洋资源的重要工具之一,成为近年来海洋工程技术研究的热点。小型便携式AUV通常是通过内部自带的蓄电池来提供能源的,而不像有缆水下机器人那样需要电缆来提供电源。由于AUV所需的能源消耗取决于其航速和所受阻力的大小,因此在设计AUV时,需要考虑在任务完成的前提下,尽可能地减小其受到的阻力。
近年来,计算流体力学(computational fluid dynamics,CFD)在AUV水动力学分析中得到了广泛应用。与传统试验相比,CFD具有可预先研究、不受条件限制、成本低和周期短等优点。因此,许多学者开始探索如何利用CFD来设计优化AUV的各项参数,以尽可能地减小其所受的阻力,并提高其速度和稳定性。这些参数包括AUV的外形、尺寸、大小等,都对AUV的水动力性能和能源消耗产生着重要影响。通过CFD模拟分析,可以更加深入地理解AUV的水动力学特性,为优化设计提供科学依据。魏子凡等[2]基于CFD对不同AUV艇体的阻力性能进行了分析,王敏健[3]研究了考古AUV水动力分析及壳体外形设计,汪向前[4]研究了太阳能AUV概念设计与水动力性能分析,但是在针对某一具体型号的小型便携式自主水下机器人的挂载侧扫声呐流线型优化方面,鲜有学者进行相关的分析研究。本文旨在研究一种小型自主式水下机器人挂载侧扫声呐的流线型对其水动力性能的影响。通过使用CFD分析工具,比较了两种不同流线型侧扫声呐对小型AUV的速度矢量场、压力场、压差阻力和黏性阻力等水动力参数的影响。以总阻力值[5]作为评价标准,以改善AUV的整体水动力性能为目标,探讨了优化挂载侧扫声呐流线型[6]的方法。
1 几何模型
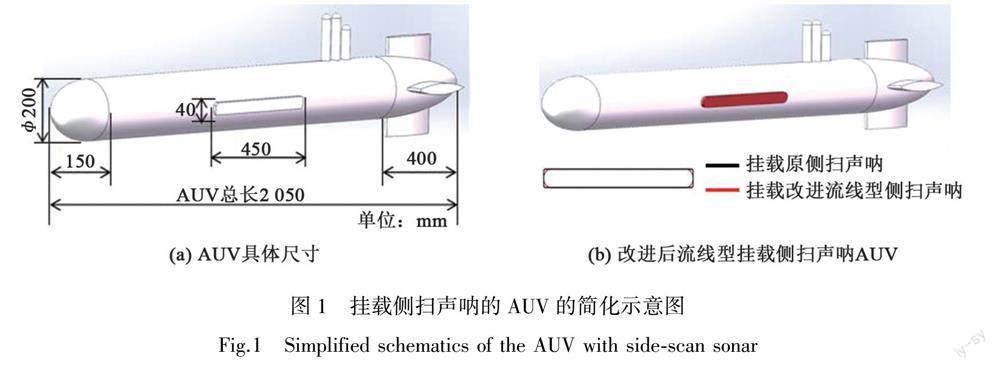
选用某海洋科技公司提供的挂载侧扫声呐的小型AUV作为研究对象,使用Solidworks软件[7],根据真实尺寸建立小型挂载侧扫声呐AUV的几何模型,并简化了AUV表面的细节结构。因为细节结构对水动力分析的影响非常小,而在建立数值模型时对网格划分的要求非常高[8],同时这些细节需要复杂的计算,这将导致计算时间长且效率低下,故使用简化的模型。侧扫声呐尺寸为总长450 mm,总宽40 mm,总高30 mm[9]。图1为
小型挂载侧扫声呐AUV的尺寸和改进后的挂载流线型侧扫声呐的AUV型线图。
2 计算流体力学模拟
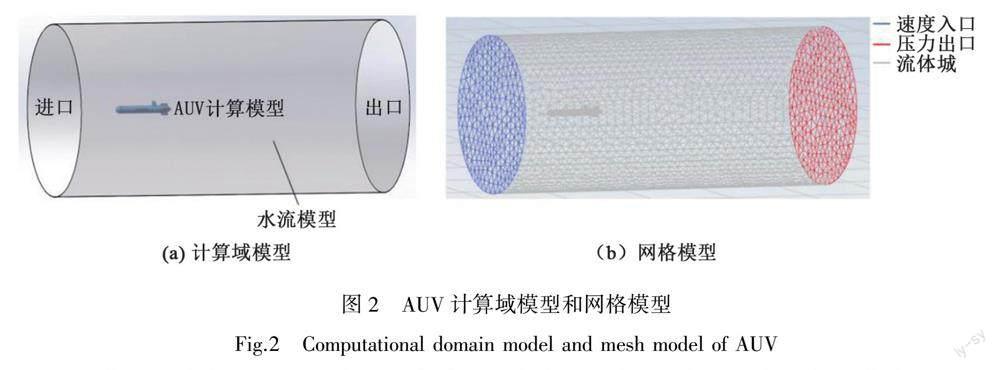
AUV在水下航行时所受到的阻力对其快速性[10]和运动预报具有重要影响,也是综合航行[11]性能的重要因素之一。为了准确计算AUV的水下阻力,实现其操纵性能预报和运动控制,采用CFD数值模拟计算方法对原挂载侧扫声呐和改进流线型侧扫声呐的AUV进行了阻力分析。采用1∶1比例的AUV实体模型,并将其放置在直径为5 000 mm、长度为12 000 mm的圆柱形水域中作为计算域,以确保数值模拟结果的准确性和可靠性。
在本文中使用ICEM-CFD软件对AUV进行网格划分。在处理圆柱体流场计算域时,采用四面体网格,因为四面体网格在保持网格单元质量均匀性方面表现良好,能够提供更稳定的数值模拟结果。为了捕捉细节并准确模拟流场的行为,对挂载侧扫声呐的关键部分使用更密集的网格,通过加密网格,提高计算结果的准确性,为了保证网格的连续性设置了边界层。总共生成了260 008个网格单元,最终得到的网格模型如图2所示,该模型具有高度的细节和精度,可以用于进行后续的数值模拟计算。
本文使用三维CFD求解器对N-S方程进行求解,并采用二阶迎风格式进行网格离散化处理。因雷诺数处于湍流流动范围,因此采用Realizable k-ε湍流模型[12]对流场的湍流流动进行描述。该湍流模型可以更准确地描述湍流流动的物理特性,在数值求解过程中,通过求解k和ε两个方程,可以得到湍动能和湍流耗散率的变化情况。通过这些变量的计算,可以进一步计算湍流剪切应力和湍流动能的传递等物理量,从而更准确地模拟流场的湍流流动。模拟AUV在水域中以某个恒定速度航行的状态,主要对AUV所受阻力进行分析。为计算方便,本文入口条件设置为velocity-inlet,出口條件设置为outflow,流体密度ρ=1 000 kg/m3,入口速度设置1,2,…,n kn(1 kn=0.514 m/s)。求解ns方程,获得航行器运动过程中的流场信息。
3 流场结果分析
3.1 流域速度矢量分析
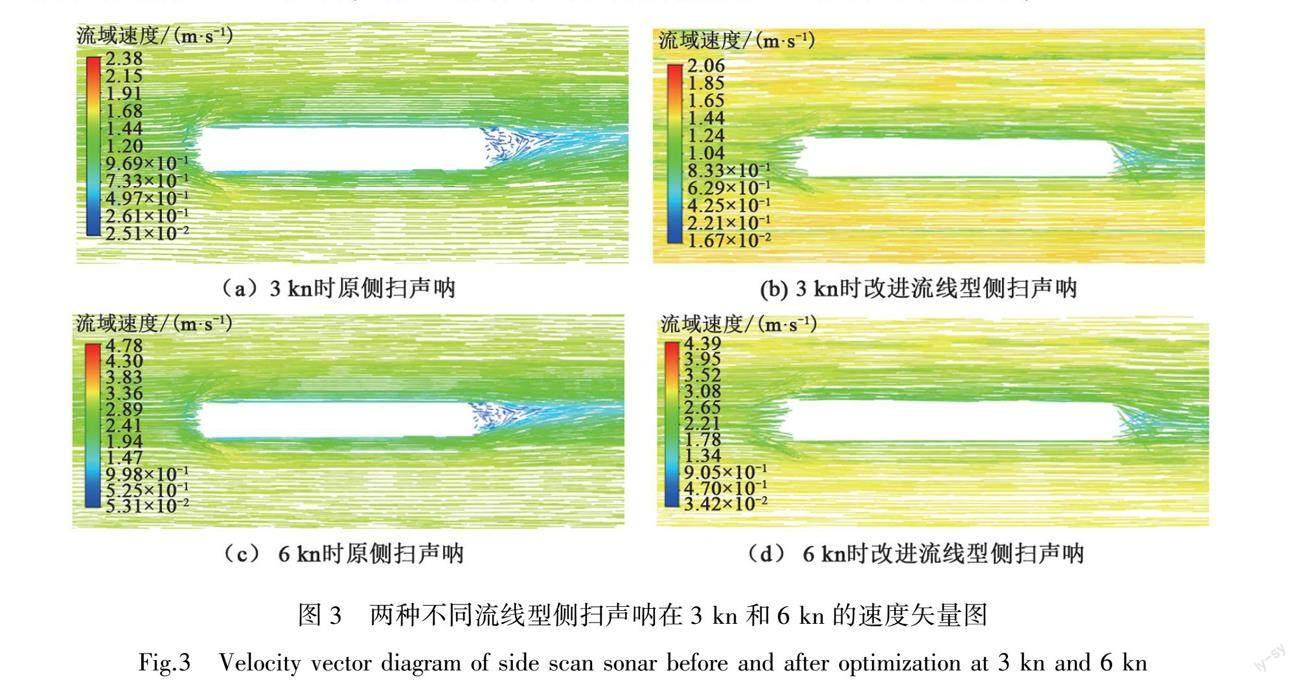
本文对挂载原侧扫声呐的AUV和挂载改进流线型侧扫声呐的AUV在3 kn和6 kn的不同航速下的水动力性能影响进行了CFD分析。得到的侧扫声呐的流域速度矢量结果如图3所示。
通过对相同航速下挂载原侧扫声呐AUV与挂载改进流线型侧扫声呐AUV的流域速度矢量图分析可得,原侧扫声呐在航速3 kn和6 kn下,来自前方的水流在穿过侧扫声呐之后会发生弯曲和分离,并且会在声呐尾部形成一个旋涡,导致在回旋区域内的流体速度降低,同时也会降低压力,形成一片低压区域。这个低压区域会影响周围流体的流动状态,从而导致总压损失。总压损失会减少AUV的推进力,同时,产生的局部涡流会消耗能量并增加AUV的阻力;相比之下,改进的流线型侧扫声呐在3 kn和6 kn航速下可以更好地控制水流的流动状态,减少水流阻力,降低能耗,可以有效避免旋涡的形成和总压损失的发生。
3.2 压力场分析
图4为侧扫声呐模型改进前后AUV在航速为3 kn和6 kn下流域的压力场云图。通过比较相同航速下原侧扫声呐与改进流线型侧扫声呐的流域压力场云图,可以看出两种声呐在首部表面的压力最大。这是由于在航行过程中,水流遇到首部前沿时会产生阻力,从而在首部形成正压区。同时,由于水流的运动状态和侧扫声呐表面形状的变化,水流会在首部上下缘角处转折形成局部分离,导致水流速度增大,从而产生负压区域。在侧扫声呐的中段长度方向,水流的压力分布对AUV的流体动力学性能产生影响。因为在这一段长度内,水流通过AUV的侧面时会产生压差,影响AUV的稳定性。当水流的压力分布不均匀时,AUV的航行状态会变得不稳定,并且流体阻力增加,AUV的速度和效率降低。对其在首部和尾部进行流线型改进,使水流在流经侧扫声呐的过程中更加平缓地分流,减小了侧面的压差,从而在流域压力场云图中呈现出更均匀的对称面压力分布,压力梯度也更平缓。这种设计提高了AUV的稳定性,从而能够更加精准地进行侧向探测和测量。
3.3 表面压力分析
图5为该挂载侧扫声呐AUV在不同航速下的表面压力分布图。由图5可以看出,AUV表面的头部以及附件迎流面压力较高。在3 kn航速下,挂载原侧扫声呐AUV迎流面最大的绝对压力为102 477 Pa,背流面最小的绝对压力为100 310 Pa;挂载改进型侧扫声呐AUV迎流面最大的绝对压力为102 350 Pa,背流面最小的绝对压力为100 160 Pa;在6 kn航速下,挂载原侧扫声呐AUV迎流面最大的绝对压力为105 954 Pa,背流面最小的绝对压力为97 269 Pa;改进型AUV迎流面最大的绝对压力为105 632 Pa,背流面最小的绝对压力为96 106 Pa。
可以发现在3 kn和6 kn速度下无论是迎风面还是背流面挂载改进流线型侧扫声呐AUV的压力值都低于挂载原侧扫声呐的压力值。当AUV在水中移动时,周围的水会对其表面施加压力。这个压力分布影响AUV的运动和稳定性。在这种情况下,改进挂载的侧扫声呐具有更流线型的形状,使得水流更加顺畅地流过AUV的表面。这样可以减少AUV表面的压力分布,从而减少阻力和摩擦。此外,由于侧扫声呐的流线型更好,在水流黏性作用下,侧扫声呐也不容易发生局部分离,进一步减少了AUV表面的压力分布。因此,改进挂载的侧扫声呐的流线型能够提高AUV的动力性能,减小其受到的阻力和摩擦,提高运动效率和稳定性。此外,无论在低航速和高航速状态下,改进型AUV上的附件对流场的扰动均小于原AUV上的附件对流场的扰动,这进一步证明了改进流线型侧扫声呐对AUV的性能和效率的重要作用。
3.4 阻力特性分析
降低AUV阻力可以提高AUV的运行效率和续航能力,减少能源消耗,同时提高AUV的稳定性和控制性能,因此是AUV改进的主要目标之一。在1~7 kn航速下进行数值模拟计算,挂载原侧扫声呐AUV和挂载改进流线型侧扫声呐AUV模型的黏性阻力和压差阻力随航速变化的柱状图如图6所示。从图中可以看出,挂载侧扫声呐AUV模型的黏性阻力和压差阻力随着航速的增加而增大。同时,挂载原侧扫声呐AUV在3~7 kn航速下的黏性阻力和压差阻力均明显高于挂载改进流线型侧扫声呐AUV。在3 kn航速下,挂载改进流线型侧扫声呐AUV的黏性阻力比挂载原侧扫声呐AUV降低了9%,压差阻力降低了18%。在6 kn航速下,挂载改进流线型侧扫声呐AUV的黏性阻力比挂载原侧扫声呐AUV降低了4.2%,压差阻力降低了12%。
挂载侧扫声呐AUV的总阻力随航速变化的折线图阻力值如图7所示。从图中可以看出,在航速达到2 kn后,挂载改进流线型侧扫声呐AUV的总阻力值明显低于挂载原侧扫声呐AUV的阻力值,并且呈现非线性增加的趋势。
3.5 数值模拟试验验证
挂载原侧扫声呐AUV和挂载改进流线型侧扫声呐AUV模型在1~7 kn航速下的数值模拟得到的总阻力值见表2。发现在3 kn的航速下,挂载改进流线型侧扫声呐AUV的总阻力值比挂载原侧扫声呐AUV降低15.4%,在6 kn的航速下,挂载改进流线型侧扫声呐AUV的总阻力值比挂载原侧扫声呐AUV降低10.1%。改进后的侧扫声呐采用了流线型设计,这种设计可以减少侧扫声呐产生的正压区和负压区。在流体作用下,正压区和负压区之间会产生分离区,也就是阻力产生的主要区域。在改进后的侧扫声呐中,采用了更加流线型的设计,使得分离区的大小更小。这意味着在流体作用下,需要消耗的能量更少,因此产生的阻力也就更小,从而降低了AUV的总阻力值。
研究表明,通过采用挂载改进流线型侧扫声呐AUV的设计方案,可以有效地减小AUV在航行过程中所受到的各项阻力值。在正常航速3 kn和高航速6 kn航速下进行的对比试验结果显示,改进方案在正常航速和高航速下都具有显著的减阻效果,这表明了流线型设计在提高AUV性能方面的有效性。
4 结论
本文的研究结果表明,通过对挂载原侧扫声呐的AUV和挂载改进流线型侧扫声呐的AUV进行水动力分析,发现在不同航速下,改进流线型侧扫声呐的AUV均得到了有效改善。改进后的小型AUV在3 kn航速时黏性阻力降低9%,压差阻力降低18%,总阻力降低15.4%;在6 kn航速时黏性阻力降低4.2%,压差阻力降低12%,总阻力降低10.1%。通过优化AUV挂载侧扫声呐的流线型,可以显著降低AUV的阻力值,从而提高AUV的性能和效率。因此,改进流线型侧扫声呐AUV的设计方案具有广阔的应用前景,可以为未来挂载附件的AUV提供有益的参考。
参考文献:
[1]刘芙蓉, 陈辉. 自主式水下潜器研究开发综述[J]. 舰船科学技术, 2008, 30(5): 20-23. DOI: 10.3404/j.issn.1672-7649.2008.05.002.
[2]魏子凡, 俞强, 杨松林. 基于CFD不同AUV艇体的阻力性能分析[J]. 中国舰船研究, 2014, 9(3): 28-37. DOI: 10.3969/j.issn.1673-3185.2014.03.004.
[3]王敏健. 考古AUV水動力分析及壳体外形设计[D]. 上海: 上海海洋大学, 2021.
[4]汪向前. 太阳能AUV概念设计与水动力性能分析[D]. 哈尔滨: 哈尔滨工程大学, 2021.
[5]SENER M Z, AKSU E. The effects of head form onresistance performance and flow characteristics for a streamlined AUV hull design[J]. Ocean Engineering, 2022, 257: 111630. DOI: 10.1016/j.oceaneng.2022.111630.
[6]刘进, 蒋慧略, 刘波, 等. 汽车外流场分析以及流线型改进[J]. 山东科学, 2020, 33(3): 87-92. DOI: 10.3976/j.issn.1002-4026.2020.03.013.
[7]俞强, 魏子凡, 杨松林, 等. 基于CFD不同AUV艇体阻力性能研究[J]. 船海工程, 2014, 43(2): 177-181. DOI: 10.3963/j.issn.1671-7953.2014.02.046.
[8]TIAN W, DU R, WANG X. Computer assisted 3-D molding design of gear based on SolidWorks software[J]. Academic Journal of Computing & Information Science, 2022, 5(14): 88-93. DOI: 10.25236/ajcis.2022.051414.
[9]LI Y F, WANG Y W, DU C. Performance simulation of plate heat exchanger based on ANSYS ICEM[J]. IOP Conference Series: Earth and Environmental Science, 2020, 546(5): 052046. DOI: 10.1088/1755-1315/546/5/052046.
[10]何隆, 张亚, 李世中, 等. 基于响应面方法的AUV水动力外形优化[J]. 兵器装备工程学报, 2022, 43(12): 43-50. DOI: 10.11809/bqzbgcxb2022.12.007.
[11]顾加烨. 复杂海洋环境下的AUV路径规划研究[D]. 镇江: 江苏科技大学, 2022.
[12]曾宇,汪洪波,孙明波,等.SST湍流模型改进研究综述[J].航空学报,2023,44(9): 103-134.
