肢体功能障碍患者应用康复机器人体验质性研究的Meta整合
2023-12-14 09:38毕轩懿闫妍叶旭春
护理学报 2023年22期
毕轩懿,闫妍,叶旭春
(海军军医大学 护理系,上海 200433)
肢体功能障碍已成为全球性公共健康问题[1],对护理事业发展形成严峻挑战。 康复机器人可实时模拟肢体运动规律并支持患肢功能锻炼, 已成为智慧时代下聚焦康复护理难题的重要解决策略[2-3],不仅能带动患者患肢的主被动运动, 提高生活质量和自理能力,还能替代医护人员的机械重复操作,减轻工作强度并提高工作效率[4-5]。 然而,人机交互过程中的疲劳、不适等不良感受,严重影响患者的锻炼积极性和依从性[6],因此深入探索患者使用康复机器人的体验尤为重要。Laparidou 等[7]采用Meta 整合法从患者、 照顾者和医护人员三方视角探究了对康复机器人使用的感知与体验, 但纳入文献发表于2011—2020 年,且未聚焦特定人群,研究结果的适用性可能存在一定限制。 目前我国尚未见相关主题的报道, 因此本研究旨在整合肢体功能障碍患者对康复机器人的应用体验, 为国内康复机器人的开发设计与推广应用提供指导。
1 资料与方法
1.1 文献纳入和排除标准 文献的纳入标准:(1)研究对象(population, P):肢体功能障碍患者,不限性别与年龄;(2)感兴趣的现象(interest of phenomena, I):患者的应用体验;(3)情境(context, Co):患者使用康复机器人;(4)研究类型(study design, S):所有类型的质性研究。 排除标准:(1)仅有摘要而无法获取原文;(2)重复发表或信息不完整;(3)非中英文语言。
1.2 检索策略 计算机检索PubMed、Web of Science、CINAHL、ProQuest、IEEE Xplore Digital Library、中国知网、维普、万方与中国生物医学文献数据库,检索时限为建库到2023 年1 月5 日。采用主题词和自由词相结合的检索策略, 并追溯纳入文献的参考文献列表。 中文检索词:机器人/外骨骼、康复/物理治疗/训练、患者/脑卒中/脊髓损伤/脑瘫、体验/态度/感知/看法/意愿/接受/感受/经验、 质性研究/定性研究/现象学/扎根理论/半结构访谈/扎根理论。 英文检索 词:robot/robotic/robot -assisted/exoskeleton、rehabilitation/physio -therapy/training、patient/stroke/spinal cord injury/cerebral palsy、experience/attitude/perception/view/intention/acceptance、qualitative/phenomenology/interview/grounded theory/narrative。 具体检索策略以PubMed 为例,见图1。
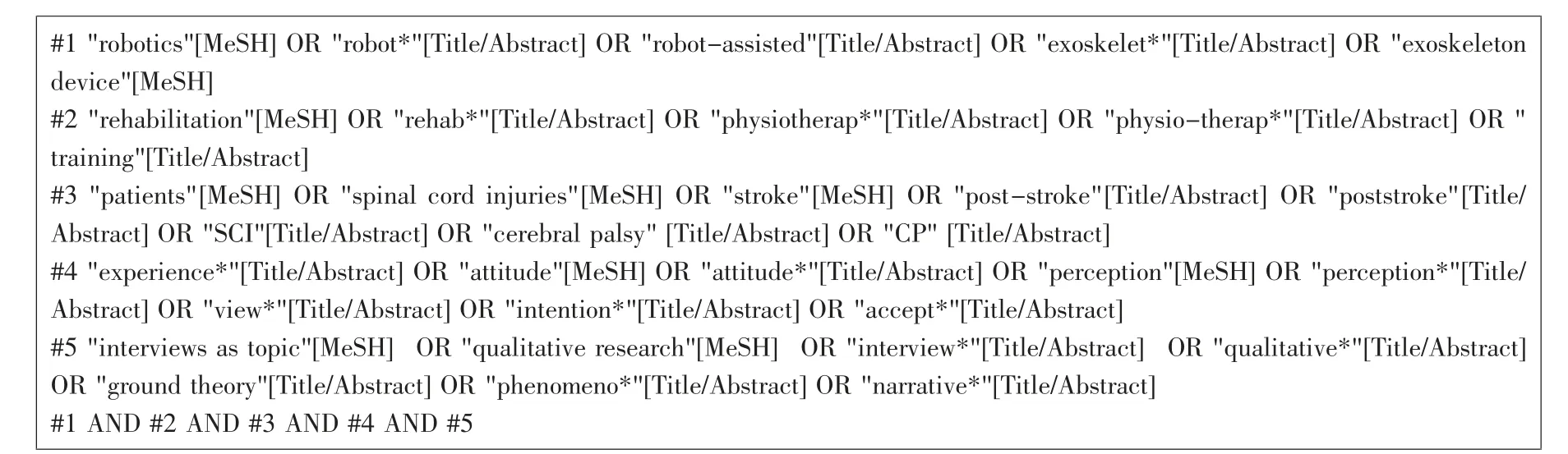
图1 PubMed 检索策略
1.3 文献筛选和资料提取 2 名系统学习循证护理的研究者严格按照纳入、排除标准独立筛选文献、提取信息及交叉核对, 意见相悖时与第3 名研究者讨论决定。 首先通过阅读标题、摘要进行初筛,排除与主题明显不符的文献,再进一步阅读全文,最终决定是否纳入本研究。 资料提取内容包括作者、 发表年份、国家或地区、研究方法、感兴趣的现象、研究对象、机器人类型和研究结果。
1.4 纳入文献的方法学质量评价 根据澳大利亚JBI 循证卫生保健中心质性研究质量评价标准[8],2名研究者独立进行质量评价, 分歧之处与第3 名研究者讨论。 共包括10 项评价项目,均以“是”、“否”、“不清楚”或“不适用”进行评价,文献质量分为A(全部为“是”,偏倚可能性较小)、B(部分为“是”,偏倚可能性中等)、C(全部不满足,偏倚可能性较高)3 个等级,最终纳入质量为A、B 级的文献。
1.5 Meta 整合 采用汇集性Meta 整合法[8],收集主题、分类、隐含的意义等相关内容,根据含义对研究结果进行整合,提高其概括性、针对性和说服力。 通过反复阅读、分析和解释每条研究结果的深层含义,归纳相似结果并形成新的类别,最终形成不同的整合结果。
2 结果
2.1 文献检索结果 初步检索文献451 篇,最终纳入文献16 篇[9-24],分别为描述性质性研究8 篇、现象学研究5 篇、混合性研究2 篇和民族志研究1 篇。文献筛选流程见图2。
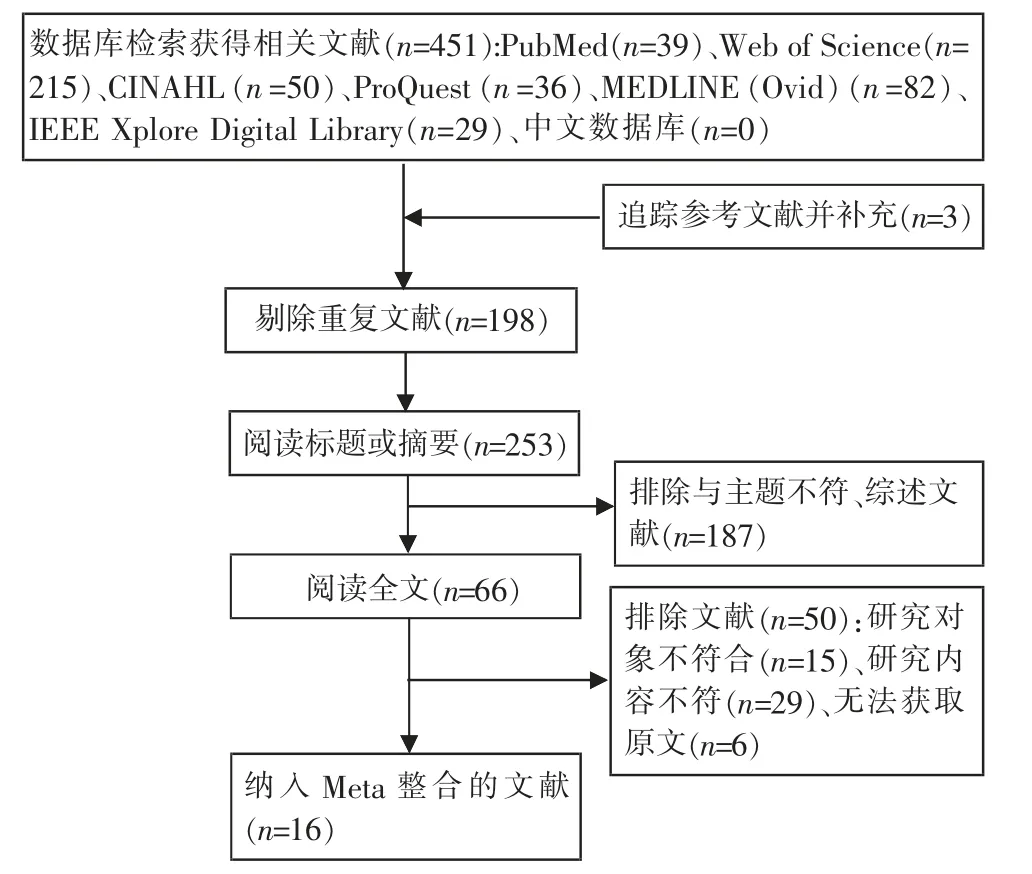
图2 文献筛选流程图
2.2 纳入文献的基本特征和方法学质量评价结果根据质性研究质量评价标准[8]进行文献质量评价,结果显示,A 级文献2 篇[12,14],B 级文献14 篇[9-11,13,15-24],纳入文献的基本特征见表1。
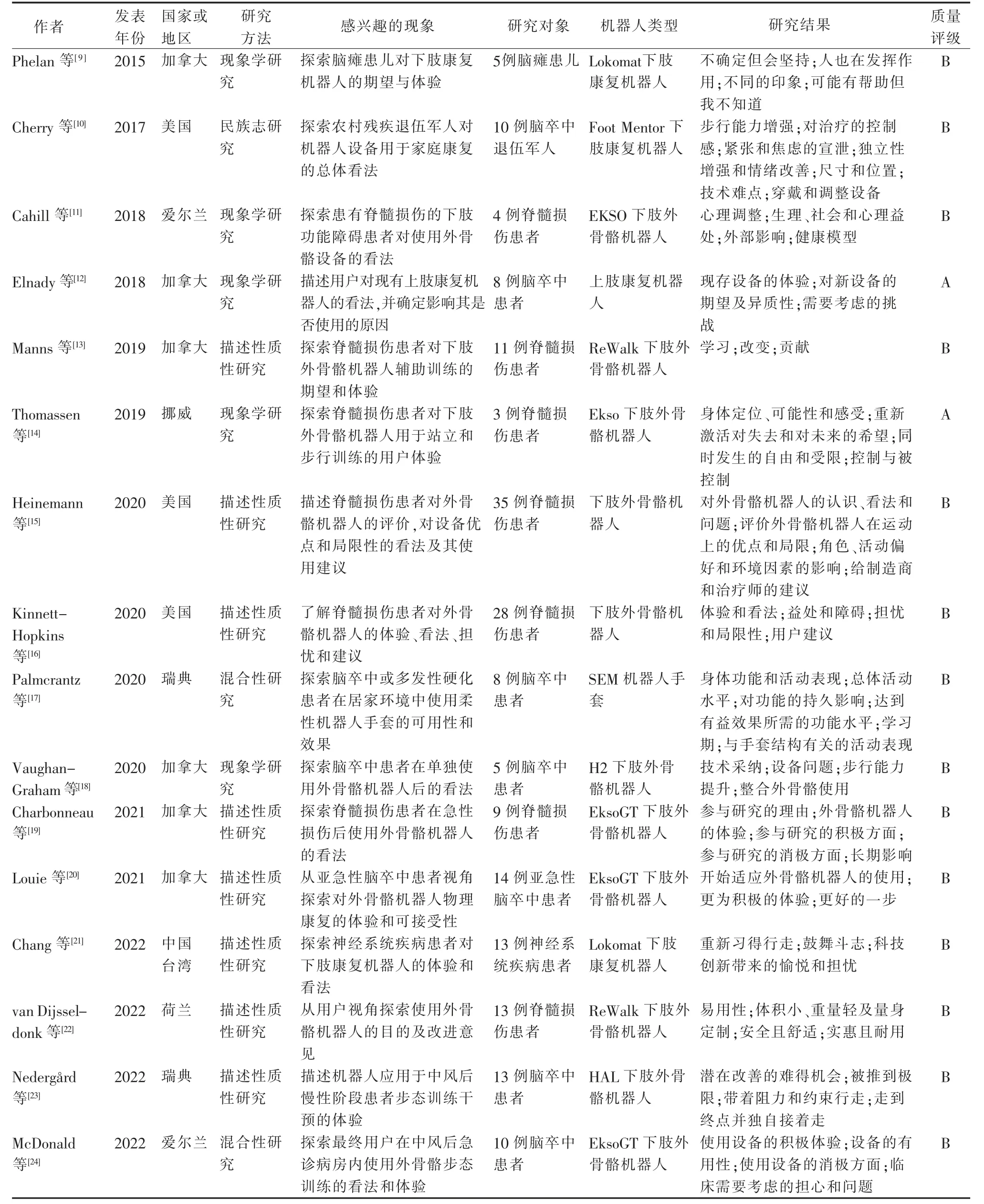
表1 纳入文献的基本特征
2.3 Meta 整合结果 通过对16 篇纳入文献进行反复理解和归纳诠释,提炼出55 个研究结果,归纳出10 个类别,最后形成3 个整合结果。
2.3.1 整合结果1: 日渐显著的康复效果带来的身心益处
2.3.1.1 类别1:生理机能控制的恢复 康复机器人能在一定程度上纠正患者的错误姿势(“它不仅能纠正姿势和步态,还能帮我重新调整自己”[15])、增强肢体力量(“我能用左手举或抓东西,以前都做不到”[17])、增强运动功能(“我能走得更长、更远”[18])、改善平衡能力(“我重新找到了平衡”[20])、控制疼痛、大小便失禁等不适症状(“我平时疼痛评分是6~7 分,使用康复机器人后低到了0~2 分”[16]),预防压力性损伤、缺血坏死等不良反应(“重力作用有助于血液流动,慢慢会变得更好”[19])。 患者还意识到受损肢体的客观存在(“让我想起了走路的感觉,我的腿还在”[21]),感受到相对真实而彻底的运动体验(“生病后我就不会走路了,现在就跟小孩学走路一样”[21]),拥有重新站立或行走的机会(“我已经好几年没站起来过了,它让我又站了起来”[16])。
2.3.1.2 类别2:活动能力增强的喜悦 患者在使用过程中体验到身体功能逐步恢复带来的愉悦感(“我踢了几堆花园里的树叶, 已经好几年没这样做过了”[13]), 悬挂组件及其他保护装置带来的安全感(“我感觉康复机器人更安全, 腰部和大腿能得到充分的支撑”[21]), 以及赋有奖励机制的沉浸式游戏体验带来的激励和鼓舞体验(“游戏有不同的得分和难度,更有挑战性,我会认真对待”[21])。 直立状态的面对面交流增强了患者的自尊心(“这是我第1 次跟别人面对面而不是抬头看,我感觉很好”[13]),日益增强的日常活动能力提升了自主性和独立性 (“我可以尝试做饭,虽然会弄的地板上到处都是,但很有意义”[12]),进而提高了对康复进展的控制感,使其对全方面康复更有信心(“我越来越觉得自己能正常走路了,这样的感觉真的很好”[22])。
2.3.1.3 类别3:自我社会价值的回归 康复机器人对患者社会价值的体现也有着重要意义, 患者以直立状态重返日常生活和工作, 拾起基本生活和社会技能,体验到自我社会价值的回归(“现在我可以自己穿衣服、切食物、睡觉起床,而不是等着别人来帮我,我又有用了”[10])。 患者强调参与康复机器人的临床试验是对科学研究做出有价值的贡献, 能够帮助与自己患有相同或相似疾病的患者(“我想如果我参加这项研究,可能会帮助其他与我处境相同的人,所以我同意了”[19])。
2.3.2 整合结果2:人-机器人交互中的多方障碍
2.3.2.1 类别4:面对新事物的担心 刚开始接触康复机器人时或使用一段时间后,患者会出现担心、顾虑等情绪, 可能影响其使用意愿, 如被机器人控制(“我感觉有另一个人在控制我走路,不是我自己”[14])、被贴上虚弱、无能、依赖等污名化标签(“我以前拒绝使用轮椅, 因为这会让我被认定为需要他人帮助并且不能独立完成事情”[12])、 产生依赖而无法独立行走(“机器人一停下来我就停下来了,我无法在没有它的帮助下走路”[11])。
2.3.2.2 类别5:充满困难的学习和适应过程 首次使用康复机器人时,患者对其工作模式、康复效果等未知事项表现出明显的不确定感(“我有点害怕,不知道机器人接下来会干什么”[9]), 认为学习和适应过程需要付出一定的时间和精力 (“对我来说有点难,需要时间来适应”[11]),常体验到明显的生理不适反应,如疼痛(“使用机器人时,我受伤的地方会感到非常疼痛”[19])、疲劳(“一点都不轻松,我感觉很累”[20])、肌肉痉挛(“我使用时出现过很多次抽筋,超级疼”[16])等,有患者因而拒绝再次使用康复机器人[20]。
2.3.2.3 类别6:未能满足需求的功能设计 患者认为康复机器人现有功能未能满足其现实需求, 提出了诸多功能设计的问题,包括结构笨重所致穿脱不方便(“机器人相当笨重,穿上和脱下都很麻烦”[23])、电池电量不耐用(“电量说是能维持6 h,但不够用”[15])、设备出现故障(如系统无反应、传输数据卡顿等)后维修过程繁琐(“机器人突然坏了,我被吊着40 min才离开,修起来很麻烦”[10])。 穿戴时的不舒服和安全性问题也会影响患者的体验,包括程序化、非自然的步态模式(“这不是我的走路风格,我有点烦它”[20])、安全绑带过紧所致的疼痛、 皮肤损伤等不适状况(“在我使用时,机器人的绑带会损坏我的皮肤”[9])、以及存在跌倒、头晕等意外发生风险[“设备是很好的,但(你可能会)摔倒到地上,尤其是刚开始用的时候”[24]]。
2.3.2.4 类别7:存在限制的客观条件 客观条件影响了康复机器人向更多场景和更广人群的推广应用, 主要包括单次治疗成本过高所致的经济负担重(“太贵了,我没有能力负担得起这么昂贵的费用”[12])、医疗资源分配不均引起的设备可及性差(“并不是所有人都能使用到它,这是个很严重的问题”[12])、设备注册问题导致的只能在医疗或康复机构内使用(“我之前使用过, 体验很好, 但我没有资格带回家接着用”[16])、体积大所致的未来居家环境应用受限(“它太笨重了,在家里用的话可能需要有很大的地方”[20]),从而未能及时体验到预期康复效果(“说实话,我有点失望,这跟我想象中康复机器人不太一样”[18])。
2.3.3 整合结果3:着眼未来导向的用户期望
2.3.3.1 类别8:期待优化功能设计 患者从康复机器人的运动功能、机体性能、易用性、整合功能等方面提出了改进建议。 首先,应完善运动功能设计,如步长和步频的个性化调整(“希望有3 档,第3 档是步伐加快,适合户外活动,第1 档是减慢,在室内用”[22])、步态模式的自然规划(“行走模式应该看起来很自然,这样就不会被认为是机器人”[22])。 其次,应优化机体性能,如防水性和防腐性(“为了能在雨中行走,机器人应该有防水性和使用耐腐蚀材料”[22])、轻便性(“它太笨重了,我不可以一直穿着…我希望能穿在衣服下”[18])。 患者还认为应提升易用性和整合其他功能来实现价值最大化,如提供视频形式的指导说明(“我认为可以提供说明书的视频版本,这样能减少学习使用机器的时间”[20])、优化人机交互模式(“我认为可以修改控制模式,例如触摸大腿行走和触摸底部坐下”[22])、搭载陀螺稳定仪等控件来预防跌倒(“如果它能像陀螺仪一样就好了,能让我保持平衡”[16])。
2.3.3.2 类别9:希望加强医护人员技能培训 患者认为康复医护人员的专业知识和操作技能(“医护人员应该有更多的培训, 我比较担心那些操作不熟练的来为我服务”[20]), 和共情、 沟通等人文关怀能力(“现在的治疗团队不会向我施加压力, 其他的也应该像这样”[9])应得到系统的培训和提升,以便为患者提供高质量、全方位的康复锻炼。 此外,患者还提出康复医护人员应有效识别康复机器人的适宜人群并尽早推荐使用[17],根据患者实际需求构建动态、个性化的康复训练方案[20],使用简洁、易懂的非临床语言给出有价值的康复指导和建议[24]。
2.3.3.3 类别10: 支持成本控制和社区落地 患者建议应尽可能减少治疗费用以减轻经济负担(“大多数人负担不起昂贵的费用,应该减少”[22]),或以租赁方式提供给目标患者 (“如果可以租用一段时间也好”[18])。经过一段时间康复治疗,患者多回归家庭或社区, 希望康复机器人能下沉进入社区及家庭以提高可获取性(“理想情况下,社区能有康复机器人,这样使用起来方便”[14]),并能在非临床情境下(健身房等)与健全人一起锻炼(“我不想再在医院中接受治疗,想和其他人一起锻炼”[11])。
3 讨论
3.1 肢体功能障碍患者使用康复机器人存在正性体验 整合结果显示, 肢体功能障碍患者在使用康复机器人时, 能够从逐渐显著的康复效果中体验到充分的生理与心理益处, 从重新拾取基本生活技能和参与到科学研究中体验到自我社会价值的回归。分析原因, 患者在患病或受伤后多丧失基本生活能力、 难以独立行走或站立, 常需家属搀扶或借助轮椅、助行器等辅助性工具才能活动,无法继续履行家庭及社会责任,因而易产生愧疚自责、自我否定、焦虑抑郁等心理健康问题[25]。 而康复机器人的临床应用助力患者实现从残疾状态向健康状态的转变,恢复对步行姿势、肢体力量、平衡能力等生理机能的控制,增强信心和自尊心,提升自主性和独立性,自我价值得到肯定,从而产生相应的积极体验。 同时,使用康复机器人后的积极变化使得患者及其照顾者的身心得到解放, 并在漫长的康复过程中继续保持对恢复健康的希望与决心[7]。
3.2 肢体功能障碍患者使用康复机器人面临多方挑战 整合结果显示, 肢体功能障碍患者认为在康复机器人使用的不同阶段面临的阻碍因素存在差异,主要涉及个体、机器人、环境三方面因素。初次接触或使用康复机器人时, 多数患者对这种新事物感到陌生,认为学习和适应起来较为困难,容易出现担心、顾虑、不安等情绪,产生对未知事物的不确定感,从而影响其继续使用的积极性。使用一段时间后,尽管患者对康复机器人的临床价值表示认可, 但提出康复机器人的部分功能设计欠佳, 尤其是穿脱过程的不便利、 步态模式的程序化、 安全绑带的束缚感等,严重影响患者的交互体验,继而出现烦躁、怀疑、动摇等情绪,最终阻碍其使用。同时,受限于技术、成本和客观条件等多方面因素, 康复机器人目前仍难以向社区端、家庭端普及应用[26],限制了更广大患者群体从中获益。
3.3 重视用户体验视角下的康复机器人功能优化与完善 整合结果显示, 肢体功能障碍患者认为康复机器人的现有功能尚无法满足其差异化个体需求,期望从优化功能设计、加强技能培训、控制成本和落地社区等多方面视角来提升用户体验。 患者在使用康复机器人前主要接受手法、 针灸等传统物理治疗,进展较缓慢[27];而在康复机器人的辅助下,患者能在短时间内独立完成步行、抓取等活动,效果较显著。然而,使用过程中的诸多不便严重影响患者的交互体验。因此,在突破康复机器人研发技术瓶颈的同时,需重点围绕“以用户为中心的设计”的理念,关注用户(尤其是患者)的主观感受,完善紧贴用户需求的功能设计, 加强医护人员专业技能和人文关怀能力的培训, 加快着眼落地社区的各项惠民措施的推进, 以进一步优化康复机器人的实际功能并更好地为患者服务[28]。
3.4 本研究的局限性及展望 本研究通过整合肢体功能障碍患者对康复机器人的应用体验, 从终端用户视角深入探索康复机器人的临床价值、 潜在问题和未来需求, 研究结果对康复护理实践具有一定的指导意义。但局限于中英文数据库,未纳入灰色文献,且多为国外文献,整合结果的适用性可能存在一定限制。 未来需要更多高质量研究关注我国患者对康复机器人的应用体验, 为机器人在国内康复护理领域的深度融合提供理论指导。
猜你喜欢
第一财经(2019年6期)2019-06-25
特别健康(2018年2期)2018-06-29
天津诗人(2017年2期)2017-11-29
西南医科大学学报(2016年4期)2016-01-03
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
中国卫生(2014年6期)2014-11-10
中国中医药现代远程教育(2014年22期)2014-03-01
河北医科大学学报(2010年10期)2010-03-25