基于灰色聚类评价的收费站分流区交通安全评价
2023-12-12 10:35滕明智
黑龙江交通科技 2023年11期
滕明智
(吉林省高速公路集团有限公司,吉林 长春 130000)
截至2021年末,全国收费公路里程18.76万km,占公路总里程528.07万km的3.55%。其中高速公路16.12万km,占比为85.9%。全国收费公路共有主线收费站972个,其中高速公路收费站488个。高速公路收费站是连接普通道路和高速公路的重要节点。不同于在主线道路上行驶,车辆在收费站分流区内的运动不受车道划线限制,可以任意转向和跨越区间。车辆进入分流区后可以自由减速、转向等分流行为,并选择任意一条收费通道。在这种无约束运动情况下,车辆之间可能发生追尾冲突、侧向冲突甚至对向冲突,导致交通冲突无序,交通状况更加复杂。
在收费站分流区交通安全评价方面,方瑜琪[1]归纳了主线收费站在布局形式设计、车辆仿真、布局模型和评价指标方面的研究,采用微观仿真方法,并根据真实调查数据对驾驶模型参数进行了标定,利用仿真模型得到车辆的平均延误时间。崔洪军等[2]基于Paramics软件对收费站的通行效率进行研究。党娜[3]基于交通流理论计算并规范了匝道收费站安全间距。
1 收费站分流区交通冲突数据获取
以收费站分流区作为研究区域,旨在获取收费站分流区几何构造,收费站分流区交通现状,并对调查视频进行处理,获得交通冲突数据,用于后续收费站分流区交通安全评价。
1.1 收费站分流区定义
本节主要定义收费站分流区的构造,如图1所示。研究的区域主要由有车道标线分流区、无车道标线分流区、收费区域组成。车辆进入收费站前,会受到收费站标志标识牌的提醒,提前准备进入有车道标线分流区,之后进入无车道标线分流区,车辆在此减速观察车道排队状况并选择合适的收费车道,因此此段又可称为减速渐变区域,最后车辆在收费区域缴费后驶出收费站分流区。车辆在无车道标线分流区会选择车道,由此会产生大量的换道行为,从而易造成交通冲突,甚至发生交通事故。
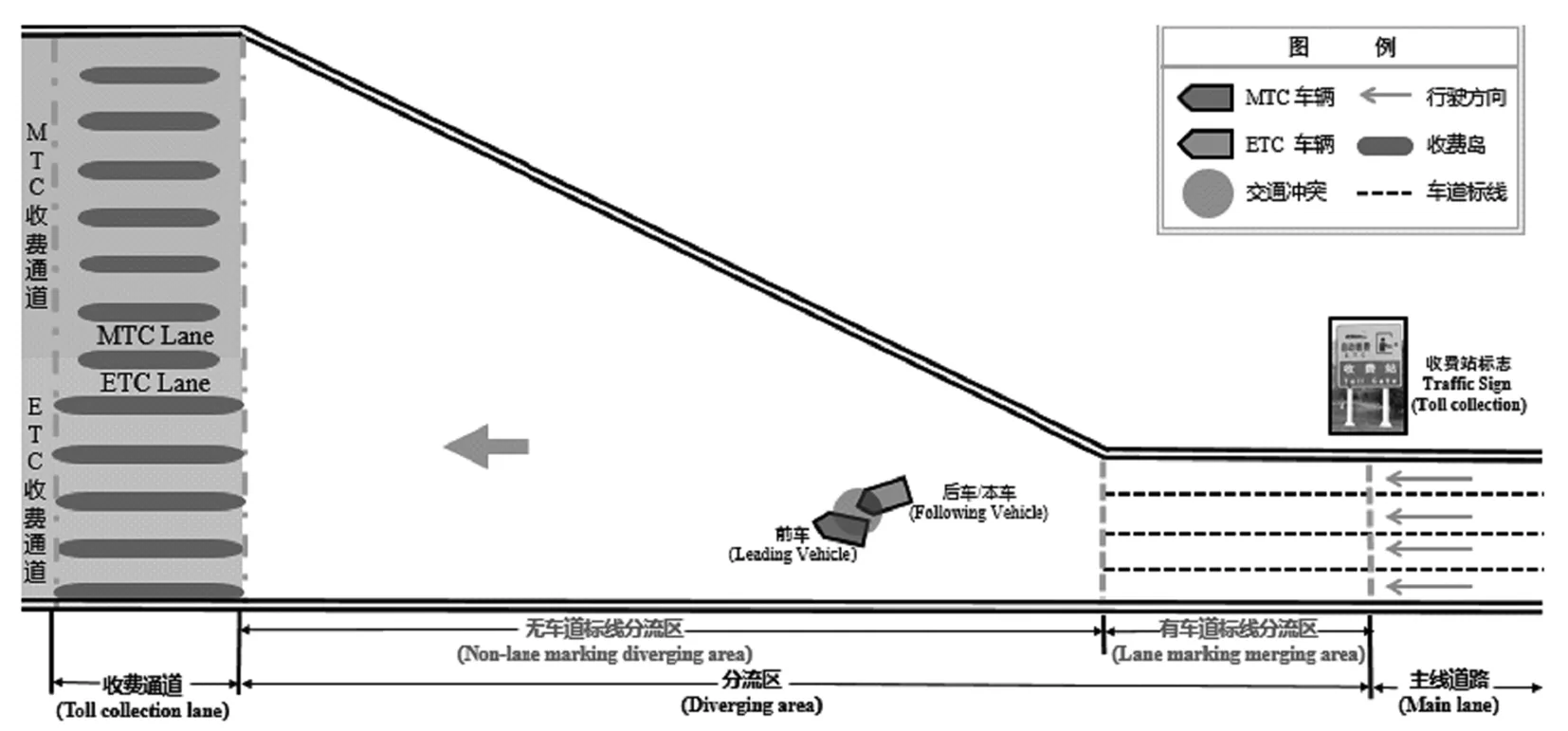
图1 收费站分流区示意图
1.2 调查方法
在以往的交通调查中,速度调查多使用雷达测速仪测量,会影响驾驶员行驶;大多数调查视频由路侧摄影机拍摄或者直接调用收费站监控录像,由以上视频调查的交通流数据和交通冲突数据提取时由于拍摄角度和拍摄畸变,存在许多误差。而无人机调查的优点主要有拍摄范围广、对驾驶员影响小,因此本文采用无人机航拍的方式进行交通调查。调查地点为长春收费站(G1京哈高速出口)。选取不同时间段共进行9次调查,每次调查拍摄1 h。在正式拍摄前调整无人机高度及角度,使拍摄画面覆盖研究区域,每次正式拍摄时无人机均保持大致相同的高度及角度。
1.3 交通冲突数据处理
(1)交通冲突度量计算。
为了计算的准确性以及方便性,选用时间和空间为度量单位,选择距离碰撞时间(TTC)以及后侵入时间(PET)作为交通冲突主要度量。
距离碰撞时间TTC经常被用于计算追尾冲突。TTC定义为两辆车保持现行速度及车道固定时,两辆车发生碰撞所需的时间,其前提是后车的速度大于前车,如公式(1)所示。
(1)
式中:TTC为距离碰撞时间,s;D为发生冲突时刻两车车头间距,m;Lf为前车车辆长度,m;VA为发生冲突时刻前车的瞬时车速,m/s;VB为发生冲突时刻后车的瞬时车速,m/s。
后侵入时间PET定义为两辆车通过潜在碰撞区域的时间差值,如图2所示,可以计算出该冲突的后侵入时间为t2-t1。
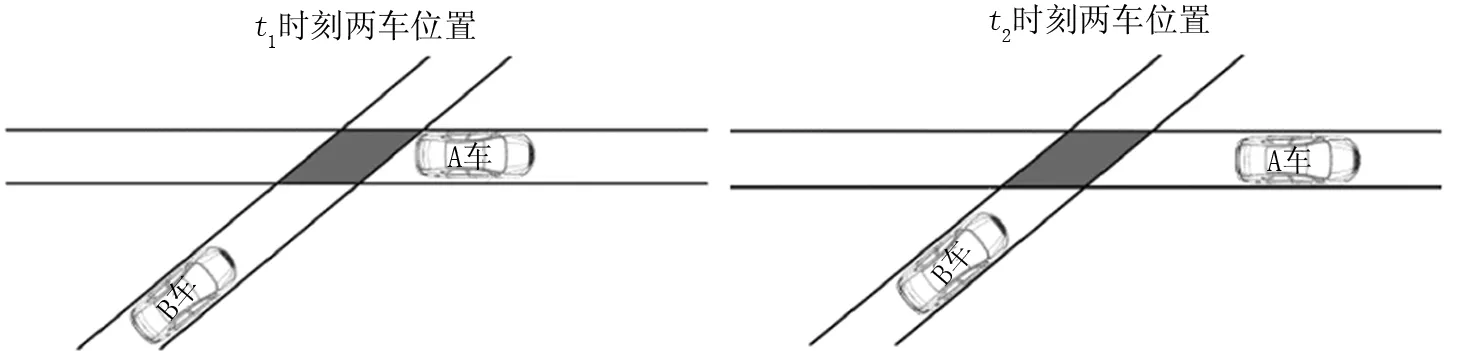
图2 换道冲突计算示意图
9次交通调查结果如表1所示。
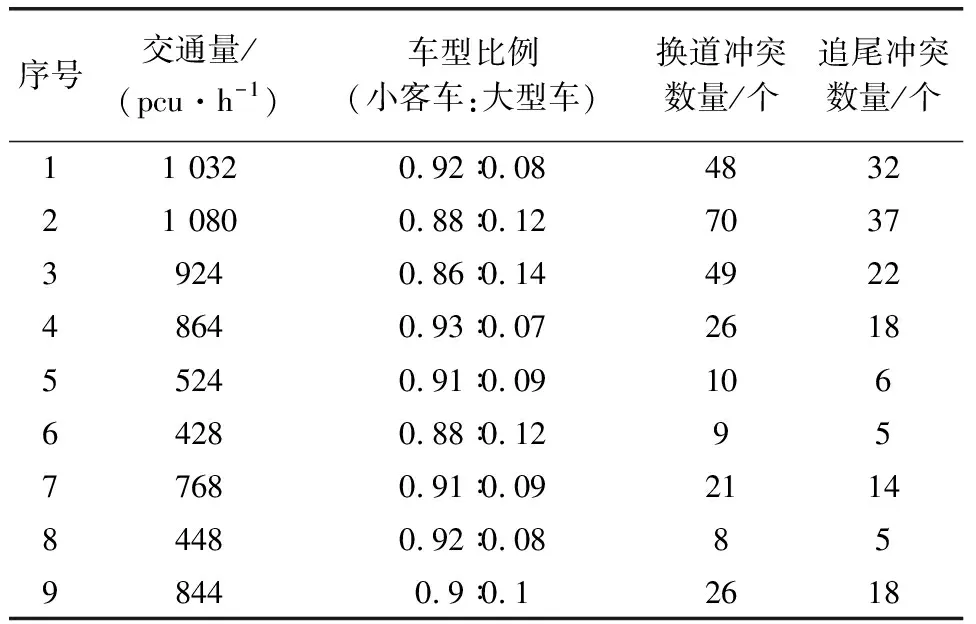
表1 冲突严重程度划分区间
(2)交通冲突阈值确定。
根据上述过程对航拍视频进行处理,提取追尾冲突TTC和换道侧击冲突PET数据。基于所提取追尾冲突TTC与换道侧击冲突PET,用来标定不同交通冲突的严重程度阈值。最后基于统计学判定法划分冲突严重程度,利用不同的累计频率分布值处理交通冲突阈值。
将调查获取的追尾交通冲突的TTC值按0.8 s的时间间隔,后侵入时间PET值按0.5 s的时间间隔绘制交通冲突累计百分频率曲线,根据统计学判定法以及实际调查情况,将20%累计频率对应的值定为严重冲突阈值,85%累计频率对应的值定为交通冲突发生的阈值,如图3和图4所示。
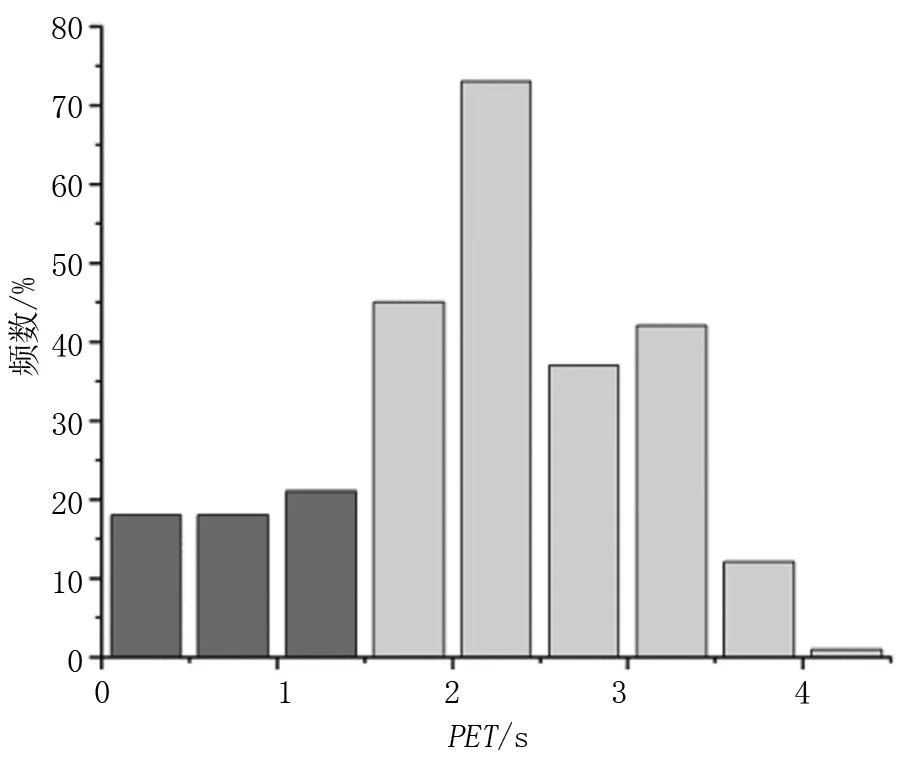
图3 换道冲突PET分布图
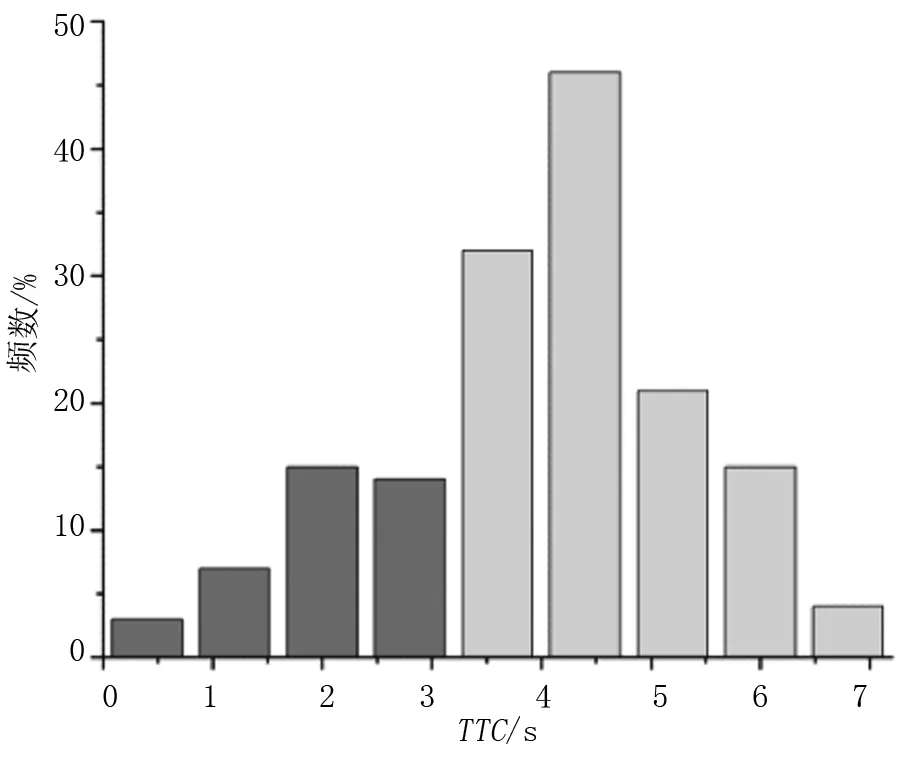
图4 追尾冲突TTC分布图
各类型冲突严重程度划分区间见表2。
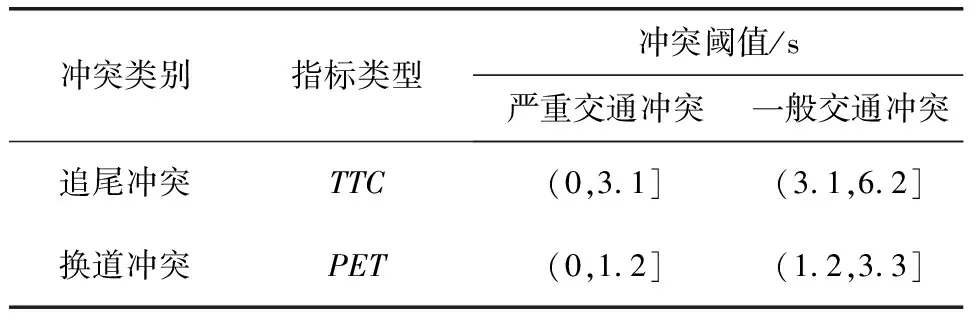
表2 冲突严重程度划分区间
2 收费站分流区安全评价
2.1 评价指标选取
选择引入交通冲突率对收费站分流区交通安全进行评价。在交通调查中,将冲突分为严重追尾冲突、一般追尾冲突、严重换道冲突、一般换道冲突四种冲突类型,因此一共有四种交通冲突率参与评价。各类型交通冲突率为
(2)
式中:Ki为交通冲突率;i为冲突类型;Ni为交通冲突个数;Qi为交通量。
2.2 灰色聚类评价法
采用灰色聚类评价模型,以一般追尾冲突、严重追尾冲突、一般换道冲突和严重换道冲突的冲突率对收费站分流区交通安全状况进行评价。
(1)建立聚类样本矩阵。
评价矩阵是由不同评价对象及其不同评价指标取值组成。设有n个评价对象,每个评价对象有m个评价指标,第i个聚类对象对应第j个聚类指标的样本值为为dij,评价指标矩阵为D。
(3)
(2)确定灰类和白化值。
(3)建立收费站分流区灰类的白化权函数。
(4)确定聚类权重。
采用模糊一致矩阵法确定各评价指标的聚类权重。

(4)

因此,关于聚类对象的灰色变权聚类系数矩阵为
(5)
2.3 收费站分流区灰色聚类分析
由前文交通调查以及公式(2)、公式(3)构建评价矩阵D
(6)
然后确定灰类和白化函数值,综合前文实际调查交通数据以及参考国内相关研究,将收费站分流区的交通状况分为四个等级:A(非常安全)、B(安全)、C(临界安全)、D(不安全),通过累计百分频率点所对应的15%、40%、60%和85%为不同灰类白化函数值。各评价指标不同灰类特征值如表3所示。

表3 各评价指标不同灰类特征值
各灰类等级对应的白化权函数图像如图5所示。
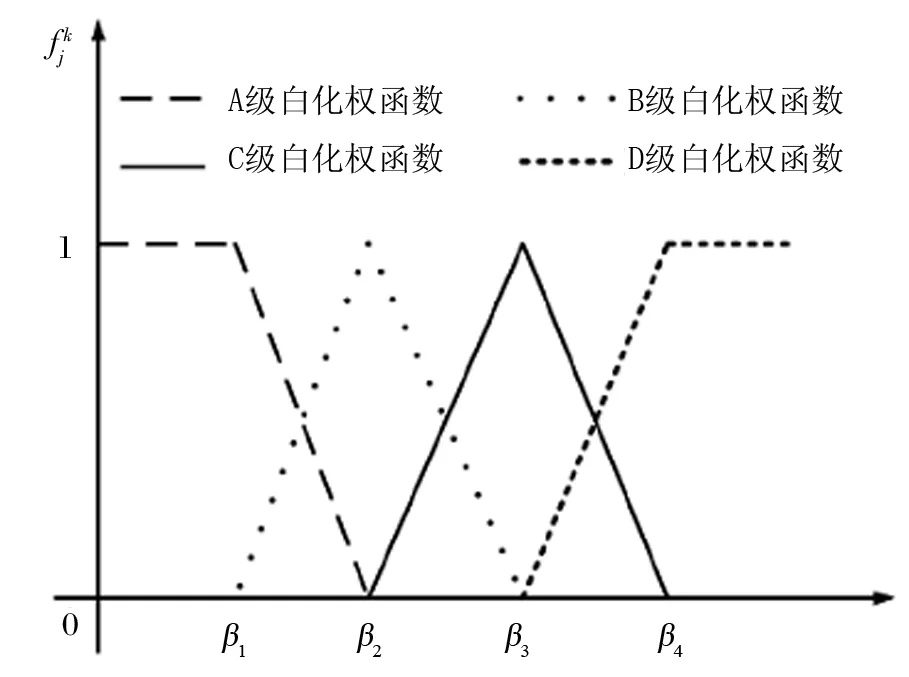
图5 不同灰类等级对应白化权函数
由此可以得到一般换道交通冲突各项的函数矩阵
同理可以计算出严重换道交通冲突、一般追尾交通冲突、严重追尾交通冲突各项的函数矩阵D2、D3、D4。
然后计算模糊优先关系矩阵,在交通冲突的研究中一般认为严重交通冲突对一般交通冲突的权重较大,而对于相同程度的交通冲突,记为相同的权重等级,可得聚类权重
(7)
通过D1、D2、D3、D4和公式(7)计算相同评价对象的不同灰类的聚类系数值为
σ1=[0.174 0.326 0.174 0.326]
(8)
[0.326 0.674 0]
同理可以计算出完整的聚类系数为
(9)
最后根据聚类系数对交通安全等级进行分级。对于第k级灰类,满足公式(10)。
σik=max{σi1,σi2,…,σik}
(10)
由此确定分流区不同指标对应的安全等级,如表4所示。
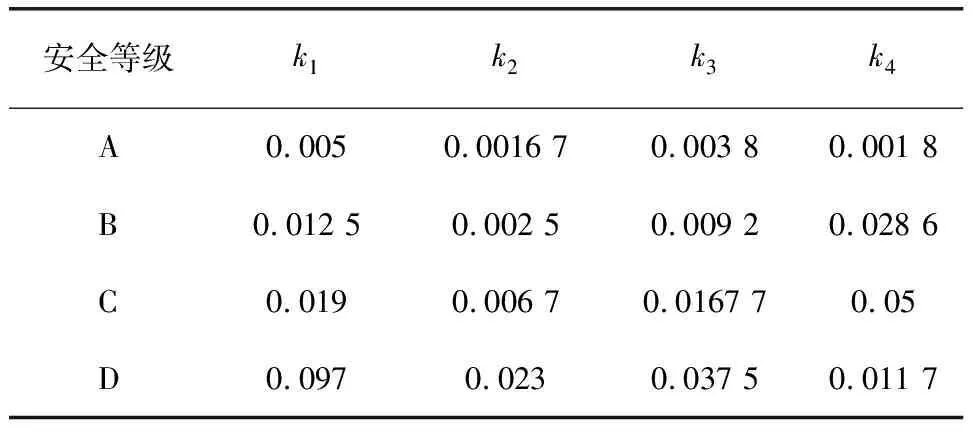
表4 各安全等级阈值
下面确定各合流区交通安全评价等级,结果见表5。
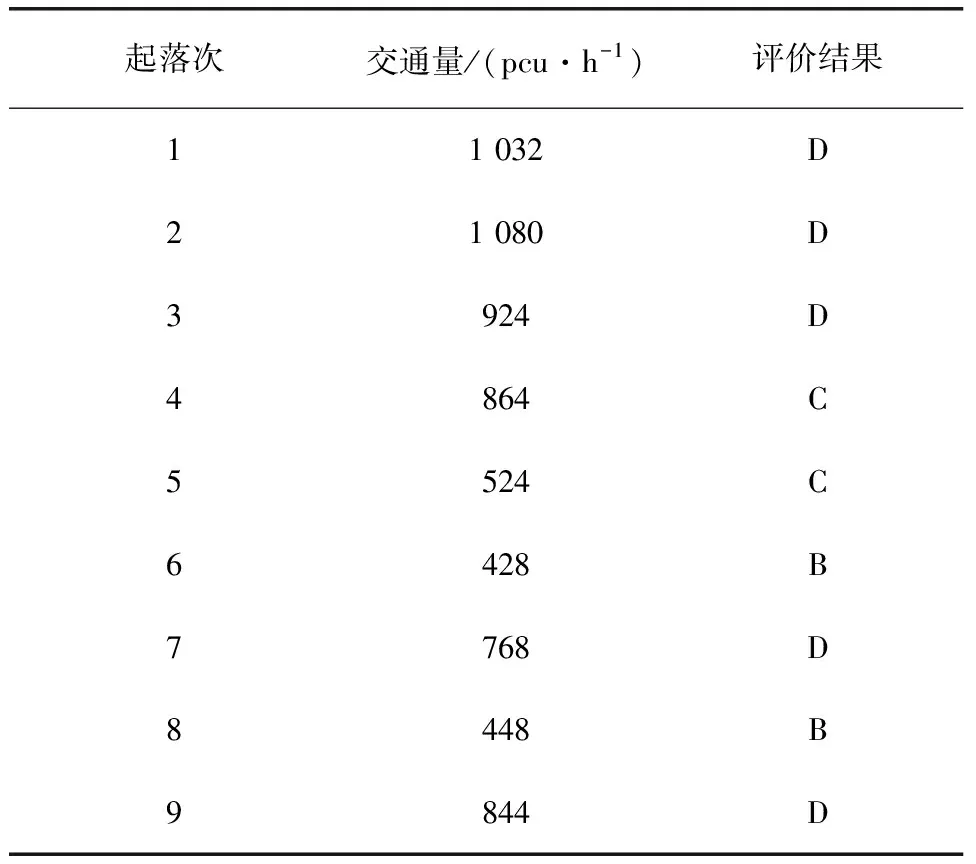
表5 各个起落次交通安全评价等级
3 结 论
评价结果显示,随着收费站分流区交通量变大,收费站的交通安全等级将会变差。由此,提出交通安全改善建议如下。
(1)大力推行ETC设备办理。
ETC收费车道的服务能力远远大于MTC收费车道和混合收费车辆,因此,如果车辆都选择ETC收费通道,会提升收费站的通行效率,减少收费站的交通冲突。
(2)提升收费站交通服务能力。
完善收费站标识标志可以提前告诉驾驶员收费车道布置方式,从而让驾驶员可以提前变道选择合适的车道,减少在渐变段变道次数。此外,升级收费电子系统可以提升收费站服务水平,减少因电子系统故障造成的交通延误。
猜你喜欢
中国交通信息化(2022年8期)2022-10-28
中国交通信息化(2022年7期)2022-10-27
兵器装备工程学报(2022年9期)2022-10-14
预防青少年犯罪研究(2022年1期)2022-08-15
黑龙江水利科技(2021年12期)2021-02-18
化工管理(2020年33期)2020-12-10
电子技术与软件工程(2019年21期)2020-01-16
中国交通信息化(2019年2期)2019-03-25
电信科学(2017年6期)2017-07-01
中央民族大学学报(自然科学版)(2017年1期)2017-06-11