
基于粒子群算法的含光伏微电网并网功率控制系统
2023-12-09 02:55洪毅
电子设计工程 2023年23期
洪毅
(中国能源建设集团广东省电力设计研究院有限公司,广东东莞 510663)
近些年来,随着新兴能源行业的快速发展,微电网也获得了普遍发展,更多的微电网与新能源之间实现了互连,以达成对能量资源的有效使用与能源质量互补的目的。微电网在建立后可以有效提高供电系统的可靠性和灵敏度,同时充分利用太阳能、风电等新能源,以优化微电网能量结构,减少污染气体的排放,微电网中所存在的分布式能源系统具有间歇性、随机性的特征,能够有效地控制微电网和主电网联系点之间的电力变化,进而降低微网对电网整体结构的冲击,这一特点受到了学者的广泛关注,针对微电网功率控制的相关研究课题也越来越多。
文献[1]提出了一种基于自适应权重粒子群优化算法的分布式光伏并网功率控制方法,该方法依据粒子群优化,通过自适应权重设计,控制部分区域的微电网并网功率,但是利用权重算法只能控制微电网并网的部分区域,无法细致化对点控制;文献[2]基于遗传算法优化方法,搭建了卷积长短记忆混合神经网络模型,实现了光伏发电功率控制。该方法在微网运行方式的切换过程中可以很好地控制目标,但是无法对并网联络线达到良好的控制效果。
粒子群算法是通过头部粒子探索、尾部粒子跟随运行的群体粒子运行方式,每个粒子都有一个相对应的适应值,该方法可以覆盖较大范围的目标点。为此,该文基于粒子群算法,设计含光伏微电网并网功率控制系统,以提升微电网功率控制范围和控制效果。
1 硬件设计
1.1 光伏电池
光伏电池的应用可以起到环保节能的效果,该文设计的光伏电池包含三个模块:光伏阵列模块、光伏转变器模块和光伏控制器模块[3-4]。光伏转变器将光伏阵列输出的电能转变为可供利用的交流电并入到大电网中。光伏控制器负责对光伏阵列进行控制,保证光伏阵列尽可能多地转化太阳能,节约时间成本和效率成本,最大程度输出电能[5-6]。光伏电池结构如图1 所示。

图1 光伏电池结构
根据图1 可知,光伏电池主要包括光伏阵列、DC、控制器、AC、采集器和电网。通过收集不同时刻下的光照强度[7]完成对不同时刻光伏阵列输出功率数值统计,以此作为软件部分的数据支撑。
1.2 处理器设计
该文选用的处理器为中央处理器,处理器内部包括运算单元和控制单元,通过处理器完成信息和程序执行,处理器在功率控制系统中扮演重要角色[8-9]。该文研究的中央处理器结构如图2 所示。
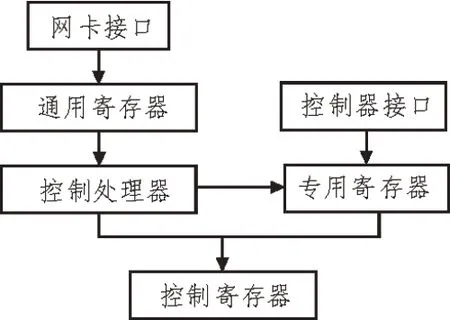
图2 中央处理器结构
根据图2 可知,处理器内部包含三种不同的寄存器,通过通用寄存器保存数据指令,存放数据量,利用专用寄存器分析数据的通路宽度,与端口连接提高操作的可行性[10-12],通过控制寄存器执行不同任务,并将数据标记到一起,展示正确页码。
1.3 控制器设计
该文选用的控制器是一种小功率的控制器,具有工作效率高、安装使用便捷、机体维护简单等特点,其输出功率可以根据调整燃料的供给而改变其大小,具有更强的可控性[13-14]。在实际应用中,由于控制器的输出功率受其自身动力条件限制,且同时发出的动力变化幅度需要在规定的范围以内,所以必须对控制器的输出功率加以计量并进行范围的确定。控制器结构如图3 所示。

图3 控制器结构
由图3 可知,控制器由单片机、滤波器、监测基站组成。控制器电路如图4 所示。

图4 控制器电路
由图4 可知,控制器电路内部包含两个电阻和一个电容。通过调整控制器的发电功率,确定控制系统的极限功率包括最大输出功率和最小输出功率,以此结果作为该文系统硬件选用的控制器的功率范围,保证既可以生产电能,也能满足热冷负荷的需求。
2 软件设计
2.1 含光伏微电网并网功率控制目标函数
光伏微电网并网运行时要考虑各种微电源的运行约束条件,以保证含光伏微电网并网的稳定运行。微电网运行时,其中最重要的是微电网并网运行时的功率平衡约束条件,因为微电网在实际运行过程中,各个系统负荷、系统功率损失等必须满足功率平衡条件[15]。
光伏电池的输出功率表示为式(1):
式中,PG(T)表示T时刻光伏阵列的输出功率数值;ρ表示与光伏电池相关的温度系数;D(T)表示T时刻光伏太阳能电池板表面的光照强度;D表示标准测试环境下光伏太阳能电池板表面的光照强度。
综合上文公式,微电网并网运行时的系统负荷功率目标函数可以表示为式(2):
式中,δ表示负荷影响因子,PM表示微电网并网运行额定功率,PF表示微电网并网发电功率。在并网运行时,含光伏微电网的运行主要从两个维度考虑:光伏微电网内部之间各微电源之间的能量调度;光伏微电网与大电网之间的能量调度。不同运行维度环境下δ系数取值不同。由式(3)可知,微电网并网运行时的系统负荷功率受到PG、PF、PM三部分输出功率,以及并网运行时的负荷影响因子共同影响。
2.2 基于粒子群算法的含光伏微电网并网功率控制
种群中的所有粒子的运动范围是在可行解的空间中,每一个粒子在搜寻中得到的运行方向和运行距离由同一个飞行的速度变量决定,在搜寻过程中,每一个粒子的搜寻方向是按照当前粒子群中最优粒子的运行方向来跟随的。
含光伏微电网并网运行过程中,其内部的光伏电池存在正序谐波或负序谐波时,其均会对运行时的电压产生影响,计算公式可表示为式(3):
式中,k+1 表示此时光伏电池交流侧存在k+1次正序,Ik+1表示在k+1 次正序谐波时的电流函数,k-1 表示此时光伏电池交流侧存在k-1 次负序,Ik-1表示在k-1 次负序谐波时的电流函数。
通过式(3)可知,无论光伏电池交流部位产生的k+1 次等值正序,还是k-1 次负序谐波,在交流侧产生的均为k次谐波。根据谐波计算结果,调节含光伏微电网并网运行状态,实现功率控制。基于粒子群算法的含光伏微电网并网功率函数可以表示为式(4):
式中,n表示粒子参数数量[16]。粒子群算法形式简洁,需要设置的基本参数少,该文设置的参数包括微电网并网运行时的系统负荷功率及负荷影响因子两部分,通过分析含光伏微电网并网功率运行状态,抑制功率波动干扰,实现最佳功率控制。
3 实验研究
为了验证该文基于粒子群算法的含光伏微电网并网功率控制系统的实际应用效果,与文献[1]自适应权重PSO 算法的电网控制方法、文献[2]基于遗传算法的电网控制方法进行对比。
3.1 实验设置
设定实验过程的控制时间为30 min,确定含光伏微电网并网功率控制过程的负荷数据和光照强度数据,分析光伏电池的工作状态,根据分析结果进行协调控制,实验环境如图5 所示。
根据图5 可知,实验期间采用控制信号处理算法,通过光伏—模糊控制系统控制功率。
3.2 实验结果分析
同时采用该文系统和两种对比系统实验,三种系统应用下得到的含光伏微电网波动情况如图6所示。
根据图6(a)可知,基于自适应权重PSO 算法在控制过程中,很难起到抑制波动的作用,受到光伏系统自身不可预测性的影响,必须要加大功率支持才能实现控制,这样直接导致出现峰值较高,控制过程稳定性差的问题。根据图6(b)可知,遗传算法控制方法在控制过程中稳定性较差,该算法在控制过程中会对含光伏微电网运行产生功率干扰,导致电网运行异常。根据图6(c)可知,采用该文系统通过粒子群对含光伏微电网功率控制,确保输出功率在±0.02 pu 内波动,在电网控制过程中,能够最大程度减少波动对含光伏微电网的功率冲击。
三种系统充放电过程的储能系统ESS(Energy Storage System)节省百分比实验结果如表1 所示。

表1 充放电过程ESS节省百分比实验结果
根据表1 可知,该文提出的基于粒子群算法的含光伏微电网并网功率控制系统充放电过程的ESS节省百分比高于30.20%,相较于两种对比系统更高。由此可知,设计系统通过粒子群算法实现功率交换响应,确保功率能够稳定在一个很小的范围波动,响应时间更快,在实际的含光伏微电网并网功率控制中具有很好的应用效果。
4 结束语
文中将自然环境中的太阳能作为微电网能源供给,通过对含光伏微电网并网功率控制系统进行硬件方面的设计和软件方面的设计,将其应用于实际,有助于减少化石能源的开采。通过建立含光伏微电网并网功率控制目标函数、求解平衡约束条件,计算微电网并网运行时的系统负荷功率,并基于粒子群算法控制含光伏微电网并网功率,实现了快捷、高效率的含光伏微电网并网功率控制,该系统具有简单易操作,且算法控制结果精准的优势,具有良好的应用效果。
猜你喜欢
测控技术(2018年10期)2018-11-25
浙江工业大学学报(2017年5期)2018-01-22
黑龙江工程学院学报(2015年5期)2015-12-04
电源技术(2015年11期)2015-08-22
电测与仪表(2015年21期)2015-04-09
电测与仪表(2015年8期)2015-04-09
电测与仪表(2015年11期)2015-04-09
燕山大学学报(2014年2期)2014-03-11
河南科技(2014年23期)2014-02-27
物理与工程(2014年4期)2014-02-27
