室内智能喷涂机器人喷涂技术研究
2023-12-09 11:57:20刘国虬
建筑机械化 2023年11期
刘国虬
(广东博智林机器人有限公司,广东 佛山 528312)
国内建筑物的喷涂施工为装修工程的常见工序,包括室内喷涂、外墙喷涂、地坪涂覆等工序,这些工序在我国基本还停留在人工作业阶段。传统喷涂施工主要存在以下缺点:外墙喷涂工序属于高空作业,存在严重的安全隐患;涂料含有毒物质,对工人有致癌作用;工人的技术水平会影响涂层的质量;传统手工喷涂效率低[1]。
喷涂机器人常见的移动方式有导轨式、爬壁式和移动式等。对于建筑室内环境,移动式喷涂机器人工作自由度较高,能灵活应对多种复杂作业对象,具有较强的适应性,因此备受推崇[2]。
为解决传统的墙面施工问题,应用智能机器人来进行作业,提高墙体立面喷涂效率解决目前用工少、喷涂质量参差不齐等问题。目前我司某型号智能喷涂机器人对比手工喷涂具有明显的技术优势,基于BIM 技术,可用于复杂施工场景的高效智能室内喷涂机器人,可以在不需要人工的情况下沿预定线路完成墙面喷涂作业,人力减少66%;喷涂时间减少60%;喷涂费用减少35%,效率提升明显,但其自动化程度尤其喷涂技术的改进仍需进一步加强。
保证涂层均匀分布的机器人运动轨迹规划一直是具有挑战性的研究课题。合理的机器人运动轨迹对于喷涂表面质量有很大影响:喷枪需要在墙面表面喷涂过程中与墙面表面保持特定的距离角度;萨摩喷枪需要在喷涂过程中保持特定运动速度。为了实现引导喷涂机器人末端喷枪沿规划轨迹对目标墙面表面进行喷涂,通常采用人工示教和自动规划2 种方法[3]。
1 喷涂机器人的结构组成
如图1 所示,智能室内喷涂机器人机架本体内设有两级提升机构,两级提升机构可沿Y轴上下移动。两级提升机构上设有喷枪机构,喷枪机构可以沿着X轴左右移动。激光雷达视觉传感器设于机架本体下端正前方,用于获取架体所处位置与障碍物之间的距离,且控制器与激光雷达视觉传感器连接,以通过激光雷达视觉传感器检测的距离确定机架本体所处空间的户型信息。机器人机架本体底部设有底盘移动组件,控制器凭借激光传感器以及预先存储在控制器内的程序,根据户型信息对应的喷涂路径控制移动组件的运动,完成喷涂作业。

图1 智能室内喷涂机器人
2 喷涂机器人工作流程
智能喷涂机器人工作流程如图2 所示。喷涂机器人首先通过视觉传感器获取所在位置的户型结构信息,通过与存储器中预先存储的户型图进行对比,确定与喷涂机器人当前所在户型结构对应的户型图,然后控制装置控制喷涂机器人按照确定的户型图对应的喷涂路径进行移动,使得喷涂机器人根据视觉传感器获取的实时信息,自主规划喷涂路线,提高作业效率。

图2 智能喷涂机器人工作流程图
在喷涂机器人作业时,喷涂机器人移动至喷涂路径的任一喷涂位置时,控制喷涂机器人到达指定位置,使得喷涂机器人可以根据喷涂需求,在喷涂路径的任一位置停止,通过自身两级提升机构控制喷涂机器人的喷枪旋转或移动,控制喷枪进行喷涂作业。当喷涂机器人停止移动时,由于机架本体相对地面静止,喷涂机器人具有较高的稳定性,因此在喷枪喷涂作业时,更加稳定,提高喷涂作业的准确性。此外,在喷涂机器人沿喷涂路径移动的过程中,还可以通过喷涂机器人的提升机构控制喷涂机器人的喷枪的移动,且控制喷枪进行喷涂,使喷涂机器人一边移动,一边进行喷涂作业,以提高喷涂作业效率。
3 喷涂机器人喷涂技术研究
3.1 智能喷涂机器人需求说明
目前喷涂工艺主要包括底漆、面漆。人工施工一般是大面积采用喷涂,小面积采用刷漆或者辊涂,封闭底漆的使用对保证过程质量有很大的作用。根据现有工艺,智能喷涂机器人设有一道面漆,两道底漆工艺,而每一种漆的喷涂又有不同的要求。需要喷涂机器人喷完后不能有色差、漏喷以及流坠现象等现象。
3.2 喷头、喷涂机的选型
针对工程验收质量检测的实际需求,结合智能喷涂机器人本体安装的实际情况,选取目前主流的喷涂机固瑞克UltraMax II 595PC Pro 喷涂机(图3),斯普瑞喷头及固瑞克517 喷头。

图3 固瑞克UltraMax II595PC Pro喷涂机
喷涂机安装于机器人本体内部,喷枪喷头安装于机器人喷涂机构末端,末端采用中空旋转平台,因此整个喷涂机器人可以实现X、Y、Z轴移动以及旋转,实现360°无死角喷涂,图4 为机器人末端喷涂系统。

图4 机器人末端喷涂系统
3.3 喷涂机器人喷涂路径
对于建筑物室内立面的喷涂,智能机器人机械臂可以上线移动实现对立面的喷涂,图5 是机器人喷涂线路示意图。配合地盘AGV 以及激光传感器,可以实现地面左右、前后的移动,实现对室内各方向的喷涂作业。

图5 机器人喷涂路径
4 喷涂机器人喷涂细化实验研究
为了摸清喷涂距离、速度、压力等对机器人喷涂质量的影响,设计本实验。图6 为喷嘴与墙面距离、喷幅之间示意图。
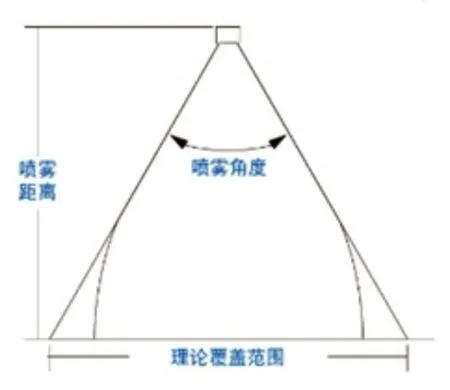
图6 喷涂示意图
实验定量:选用固瑞克390 喷涂机,喷嘴为固瑞克517;材料为立邦内墙底漆GZB-P390 与水的混合溶液,体积比为3∶1;喷涂压力分别为100bar、120bar、150bar;喷嘴移动速度分别为500mm/s、700mm/s、900mm/s;墙面含水率<10%。喷涂对象为一块已经刮好腻子层板(图7)。

图7 腻子层板
每毫米涂料撞击体积=有效喷幅×涂料厚度,实验结果如表1 所示。

表1 不同压力、速度下的喷涂效果
实验结果表明,喷嘴至墙面距离增加,有效喷幅呈增长趋势,涂料厚度总体呈减小趋势,每毫米涂料撞击体积总体呈现先增大后减小的趋势;喷嘴移动速度增加,每毫米涂料撞击体积减小。
根据同样的方案,对第一道面漆、第二道面漆做同样的实验,实验结果表明,喷涂机控制压力100bar,喷嘴移动速度为500mm/s,喷头距离墙面600mm 时,效果比较理想,涂料厚度约为75μm。无流坠,无透底现象,喷涂质量合格。图8 为最终喷涂结果。

图8 最终喷涂质量
5 结论
本文基于室内智能喷涂机器人下的喷涂技术研究,针对机器人结构特点、喷涂机、喷嘴、线路规划等,研究出适合机器人喷涂的喷涂技术,得到了整机喷涂下的最优方案,主要得到了以下结论。
1)喷涂底漆,第一道面漆、第二道面漆均可以采用同样的喷涂机以及喷嘴,控制喷涂机工作压力为100bar,喷头距离墙面600mm,喷头移动速度为500mm/s 时效果最佳。
2)对于喷涂系统,尤其喷嘴的清洗要求较高,每次喷涂完成喷嘴内外表面及时需要清洗,否则容易出现堵塞现象,自动清洗技术有待提高。
3)机器人替代人工进行喷涂作业是可行的,尤其在地下车库等大面积的作业场景下,喷涂效率更高。喷涂机器人的自动加料,提升喷涂机器人的作业覆盖率和实用性是后续主要的研究方向。
猜你喜欢
机械工程材料(2022年2期)2022-03-02 05:53:00
上海涂料(2021年5期)2022-01-15 06:09:54
上海涂料(2021年5期)2022-01-15 06:09:52
汽车维护与修理(2021年24期)2021-12-23 02:16:14
能源工程(2021年1期)2021-04-13 02:05:56
科学咨询(2020年37期)2020-01-06 05:09:42
酒·饮料技术装备(2018年1期)2018-04-28 09:09:02
中国有色冶金(2018年1期)2018-02-01 23:17:18
汽车实用技术(2017年19期)2017-11-01 06:00:49
科学家(2017年17期)2017-10-09 01:21:24