基于多层次分割的月表撞击坑自动检测
2023-12-08 10:02李海鹏董有福
测绘通报 2023年11期
李海鹏,董有福,张 昊
(南京工业大学,江苏 南京 211816)
撞击坑作为月球、火星等地外行星表面最显著的地貌结构,是研究行星表面地质定年、行星测绘与导航及资源探测的重要基础[1-4]。撞击坑自动检测算法的研究是当前行星研究的重要课题。
撞击坑自动检测算法包括候选坑生成和有效坑验证两部分,早期研究多使用边缘检测算子[5],Hough变换[6]和高光阴影区域检测[7-8]等方法确定候选撞击坑,结合机器学习方法检测有效坑,这类方法可检测出影像上明显的坑,召回率为75%~80%。近年来,许多学者使用目标检测技术在影像或DEM上检测撞击坑,多采用滑动窗口算法生成候选坑,结合传统机器学习方法或深度学习方法检测有效坑,传统机器学习方法需要人工构建特征并应用支持向量机、主动学习等方法进行分类[9-11],而深度学习方法构建多样的网络模型[12],这些方法多用于检测直径1 km以下的坑,召回率普遍为80%~85%;一些学者尝试了地形分析方法,如校正后坡向变率[13]、等高线[14]和分水岭算法[15],对于直径1 km以上坑的召回率约为80%。此外,个别学者尝试了采用面向对象的多尺度分割算法,以检测直径为1.5 km以下的坑[16-17]。
综上所述,一些学者提出了许多有效的撞击坑检测方法,且针对直径为1 km以下的小型坑具有良好的检测效果,但对于大型坑及巨型坑的检测率相对较差。因此本文设计一种具有良好稳定性的检测模型,使用面向对象的多层次分割方法并结合机器学习方法提取撞击坑,以期提高对直径范围较大的撞击坑的检测率。
1 试验样区与数据
为了验证大尺寸撞击坑的检测效果,试验采用美国国家航空航天局(NASA)LOLA科学团队(发布的118 m分辨率全月DEM。选取1个试验区和2个测试区,试验区用于模型的构建,测试区用于模型的测试和检测效果评估。 3个样区中撞击坑类型复杂,直径范围为0.5~120 km,每个区域面积均为5×105km2,位置如图1所示。

图1 试验区与测试区分布
2 过程与方法
撞击坑检测算法工作流程如图2所示。首先根据月球DEM数据计算坡度和校正后的坡向变率[13],并合成为双通道数据;然后使用多尺度分割算法生成分割对象层,再应用机器学习方法分类撞击坑对象与非撞击坑对象,这一过程需要重复多次,直至撞击坑提取完全为止;最后与文献[17]提出的面向对象的撞击坑检测算法进行对比验证。该过程的关键技术主要包括多层次结构的建立及训练高精度的撞击坑分类器。

图2 撞击坑检测算法工作流程
2.1 多层次结构建立
基于DEM数据获取坡度和校正后坡向变率,合成为一个双通道数据集后,要重复多次图像分割及再分类的过程,每次使用多尺度分割算法分割图像均会产生一个分割对象层,整个过程中会产生多个对象层,即为多层次分割方法[18],多尺度分割算法的超参数为:波段权重、尺度参数及形状因子和紧致度因子权重。超参数的设置将直接控制分割对象的形状和大小,多尺度分割算法中超参数的优选策略如下。
2.1.1 波段权重确定
波段权重代表数据集中各个通道数据参与图像分割的贡献度,当在坡度上进行图像分割时,此时波段权重坡度为1,校正后坡向变率为0。各个对象层的波段权重见表1。
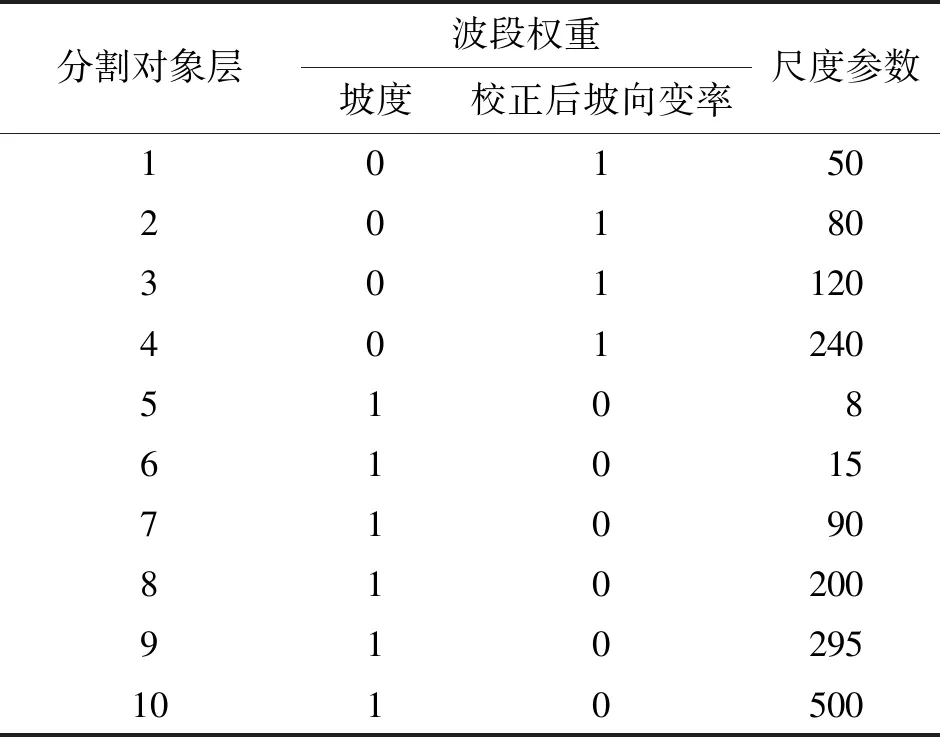
表1 多尺度分割关键参数
2.1.2 尺度参数选择
尺度参数直接控制分割对象的大小,是影响分割结果的关键因素,尺度参数越大,分割结果越大,通常采用试错法进行选择。本文需要提取撞击坑直径的跨度可达0.5~120 km,经过试验,在坡度或校正后坡向变率上分割的尺度参数最小为5,最大可达800。试错法需要试验上百次分割,以确定适合的尺度参数,可以采用更加高效的非监督方法ESP工具[19]评估尺度参数,计算结果如图3所示。ESP计算了在坡度和校正后坡向变率上根据某一尺度参数分割后对象的局部方差(local variance, LV),以及局部方差的变化率(rate of change, ROC)。ESP认为在局部方差变化明显处可能为适合的尺度参数,即ROC的波峰处(三角形),灰色虚线为初步确定的合适的尺度参数。在此基础上使用试错法进一步评估,最终确定了10个适合分割直径为0.5~120 km撞击坑的尺度参数,见表1。
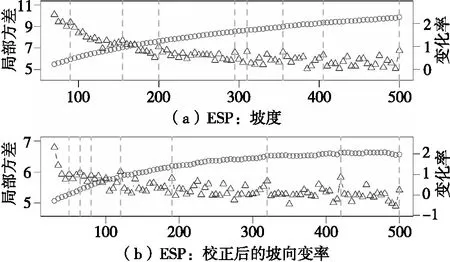
图3 ESP工具计算结果
2.1.3 形状因子和紧致度因子权重确定
形状因子和紧致度因子权重通常是根据专家经验选择的,范围为0~1。本文经过多次试验最终确定形状因子和紧致度因子权重分别为0.3和0.7,此时分割对象更加拟合月表真实的撞击坑边界形态。
2.2 撞击坑分类
在每次使用多尺度分割算法完成候选撞击坑的提取后,即生成分割对象层,需要应用机器学习方法在该层上分类有效坑。传统机器学习包括特征工程和分类器两部分,在使用分类器之前需要先构建特征空间。本文基于eCognition软件为坡度和校正后坡向变率分别构建了一个41维的特征空间,包括光谱特征和几何特征。其中,光谱特征有像素灰度的均值、标准差,最小值、最大值等共24维,几何特征有面积、长宽比、圆度等共17维,应用分类器在分割对象层上进行候选坑分类时,仅使用参与图像分割的数据构建特征空间。
2.2.1 阈值分类
在分割对象层上的分割对象只有少部分是有效的撞击坑对象,可通过个别特征的阈值初步分类有效坑。使用的特征来源于构建的特征空间,分别为分割对象的像素值均值(Mean)、圆度及长宽比。特征阈值见表3。
2.2.2 随机森林分类
使用随机森林方法分类分割对象,随机森林方法包括模型训练和应用分类器两步,在一定数量的撞击坑样本和非撞击坑样本上进行训练,训练过程中需要调整的关键参数为最大分类树和训练特征。图4为在部分对象层上使用随机森林方法分类撞击坑的过程。其中,最大分类树可通过随机森林模型返回的袋外误差(out of bag, OOB)确定,如图4(a)所示;初始的特征空间有41维,是非常庞大的,采用特征递归消除法优化特征空间,根据袋外误差返回的特征重要性度量,如图4(b)所示;横轴的特征名称为41维特征的名称,以数字代替,将特征进行排序,然后递归消除重要性低的特征,根据每次递归训练中随机森林模型返回的混淆矩阵,选择分类精度最高、特征数量较少的那组特征,如图4(c)所示。随机森林方法在各分割对象层上分类撞击坑的关键参数最大分类树和训练特征空间见表2。
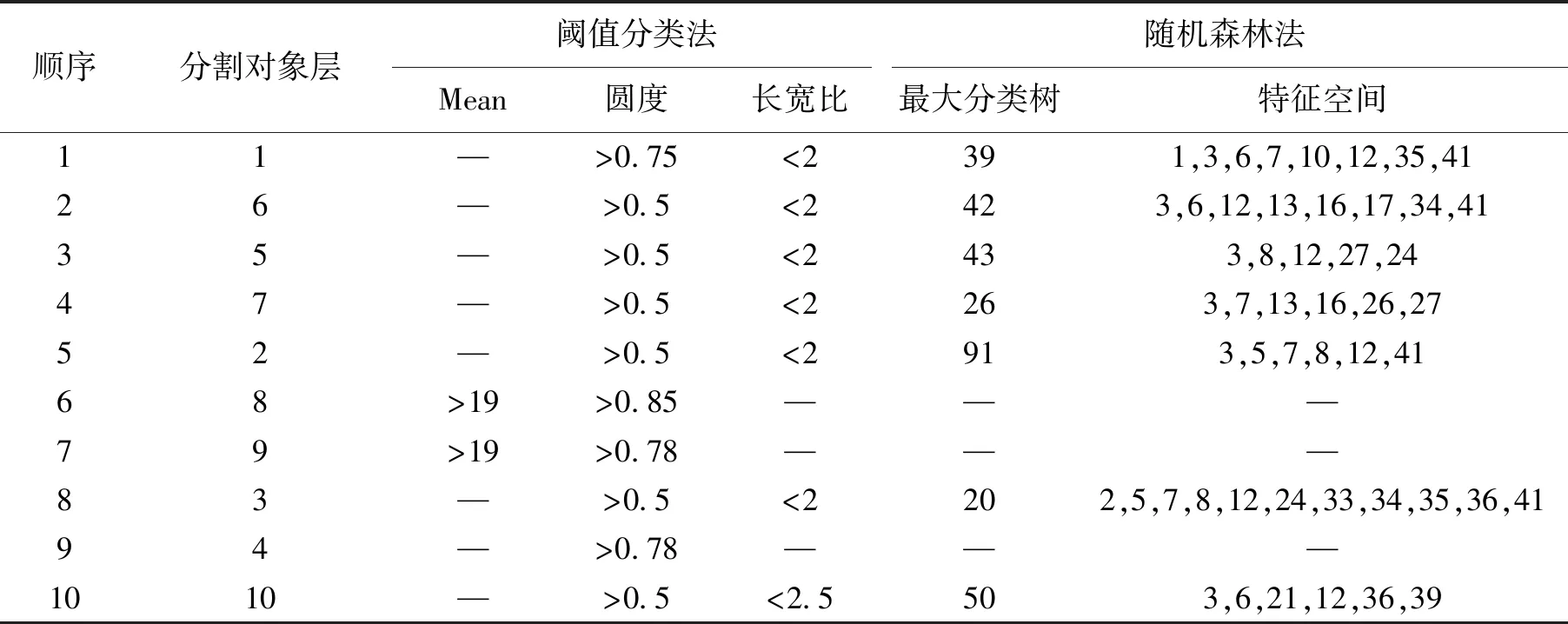
表2 各分割对象层上分类撞击坑的关键参数

图4 随机森林法分类过程
3 结果分析
3.1 试验结果
在多尺度分割算法构建的多层次结构中,即多个分割对象层上检测出有效的撞击坑对象后,可以通过获取撞击坑对象的最小外接圆作为最终的撞击坑检测结果。本文在1个试验区和2个测试区上进行了撞击坑检测,可检测的撞击坑直径范围为0.5~120 km,图5(a)中呈现了直径在3 km以上的坑,可以明显看出,直径较大的坑绝大多数被成功检测。
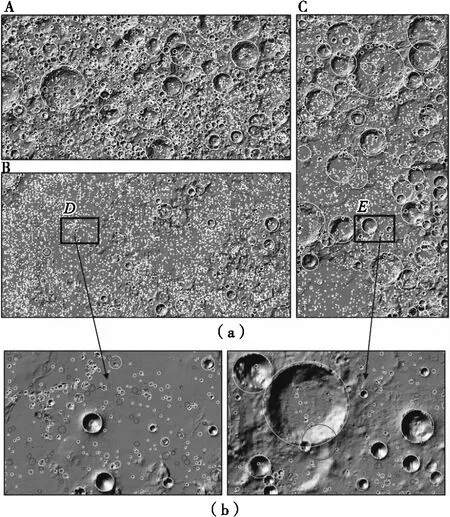
图5 撞击坑检测结果与精度评估
3.2 精度评估
为了客观地评估撞击坑检测模型对于撞击坑位置的检测表现,本文使用召回率R、精确率P两个指标,公式分别为
(1)
(2)
式中,TP代表撞击坑检测算法正确检测的坑;FP代表错误检测的坑;FN代表未检测的坑。进行精度评价的区域为图5中的D、E区域,为了保证验证的有效性,本文仅评估直径大于8个像素、直径在0.8 km以上的撞击坑。因为当直径小于一定像素时,即使是人工判断也不能保证准确性。同时对比了文献[17]的方法。根据表3中的评价结果可知,本文提出的撞击坑检测模型在召回率和精准率上分别提升了28.7%和26.3%。

表3 精度评价结果
4 结 语
本文基于LOLA全月DEM数据生成了坡度和校正后坡向变率两种地形数据,在此基础上应用面向对象的多层次分割方法进行图像分割,然后使用机器学习方法进行图像分类检测撞击坑。在全月范围选取了3个典型区域进行了撞击坑检测模型的试验,以验证模型的稳健性,可检测的直径范围在0.5~120 km,选取了一定数量的样本进行精度评估,与常规的基于面向对象检测方法作了对比。结果表明,本文方法对直径1 km以上撞击坑实现了较高的召回率,达86.5%。
猜你喜欢
小学生学习指导(高年级)(2021年10期)2021-11-02
内蒙古民族大学学报(社会科学版)(2020年2期)2020-11-06
测绘学报(2019年11期)2019-11-20
云南档案(2019年7期)2019-08-06
小天使·六年级语数英综合(2018年1期)2018-10-08
中国港湾建设(2017年11期)2017-12-19
太空探索(2016年5期)2016-07-12
土壤与作物(2015年3期)2015-12-08
时代英语·高三(2014年5期)2014-08-26
植物营养与肥料学报(2012年3期)2012-10-26