消费级无人机倾斜摄影测量监测弃土场的精度评估
2023-12-08 10:02胡晋茹赖林枫芦治源张晓峰赵廷宁魏广阔
测绘通报 2023年11期
胡晋茹,赖林枫,芦治源,张晓峰,李 元,赵廷宁,魏广阔
(1.交通运输部科学研究院,北京 100029; 2.交科院科技集团有限公司,北京 100088;3.北京林业大学水土保持学院,北京 100083)
弃土(渣)场是生产建设项目产生的松散堆积体,对其开展监测是预防和治理水土流失的基础,是国家生态文明建设的重要基础支撑[1]。
近年来,无人机低空摄影测量技术快速发展,并在测绘地理信息、应急保障、农业、水利、电力、交通等民用领域得到广泛应用[2-4]。无人机摄影测量以其便捷灵活、快速高效的优势在弃土(渣)场监测中发挥着重要作用[5]。无人机通过搭载传感器快速而准确地获取高分辨率的影像,结合地面合理分布的像控点,运用计算机手段提取地物观测对象空间立体信息,如坡度、坡长、高程、位置、外观特征等[6]。倾斜摄影测量作为一种新兴的测量技术方法正在快速发展与推广[7]。与传统的竖直航空摄影测量技术不同,倾斜摄影测量不仅从竖直方向拍摄,而且通过调整镜头的方向以倾斜的方式进行多角度摄影,采集更丰富的纹理信息,对地物信息表达更详尽,在三维建模和测绘生产中展现出更加精细、准确的潜力[8-10]。但搭载多镜头的倾斜摄影测量无人机价格昂贵,因此基于消费级无人机的倾斜摄影测量技术应运而生[11-12]。消费级无人机具有低价格、易操作、无须证照和申请空域等优势[13],其搭载的单镜头可通过云台调整镜头俯仰角模拟多镜头无人机进行倾斜摄影测量[14],从而构建实景三维模型,在满足精度的要求下,提高了效率并降低了经济与技术门槛。
目前针对消费级无人机摄影测量的精度分析研究主要有:文献[15]利用小型消费级无人机进行正射低空摄影测量,发现垂直方向的平均误差是水平方向的8倍;文献[16]基于消费级无人机通过搭载倾斜相机进行摄影测量,构建了城市精细化的三维模型,利用检查点进行几何精度评估,其中平面中误差、高程中误差均满足《三维地理信息模型数据产品规范》(CH/T 9015—2012)中的Ⅰ级1∶500成图比例尺测图精度;文献[17]基于消费级无人机倾斜摄影测量构建了精细三维模型并测算了研究区的土方量,与GNSS法对比具有可靠的精度。但是,2021年自然资源部发布了最新的《低空数字航空摄影测量内业规范》(CH/T 3003—2021)[18],其中对摄影测量的精度有更高要求。现有对消费级无人机摄影测量精度是否能满足最新规范要求的研究较少。本文以公路建设项目产生的弃土场为对象,评估其在监测过程中应用消费级无人机倾斜摄影测量的精度,并与传统正射摄影测量方式进行对比分析,为实际生产建设活动快速监测提供参考。
1 试验与方法
1.1 消费级无人机倾斜摄影测量原理
基于消费级无人机倾斜摄影测量的原理与专业倾斜航摄无人机相同[8,13-14],通过可旋转俯仰角的云台搭载单镜头模拟多镜头倾斜航摄仪。首先垂直于地面采集正射影像,以井字飞行方式从前、后、左、右4个方向与地面形成相同角度获取斜片;然后对采集的影像通过尺度不变特征变换(SIFT)匹配算法进行多视影像匹配提取特征点,采用光束法区域网平差严密解完成空中三角测量解算地面坐标,即基于共线方程与空间后方交会原理配合无人机获取数据中的位置和姿态系统(position and orientation,POS)数据,求出影像外方位元素和加密点物方坐标[17,19],公式为
(1)
式中,(XA,YA,ZA)为地物点坐标;(XS,YS,ZS)为摄影中心在地面辅助坐标系下的地物点坐标;f为焦距;λ为比例因子;ai、bi、ci(i=1,2,3)为影像的3个外方位角元素组成的9个方向余弦; (x,y)为像点的像平面坐标。
对航测区域内所有影像联合为统一的平差区域,从而构建特征点云,基于引入RTK测量得到的高精度地面像控点,消减POS数据误差使得特征点云精度较高,从而提高空中三角测量解算的精度。基于空中三角测量特征点云成果进行多视影像密集匹配生成超高密度点云,进一步构建三维模型。
1.2 试验区概况
试验区为湖南省邵阳县白仓至新宁县清江桥公路项目桩号K1+300(1#)、K10+600(2#)两处弃土场,如图1所示。原始地貌类型为低山丘陵间沟谷地貌。1#弃土场为坡地形,总占地面积为20 680 m2,场内高程为295~310 m,总体地势较为平缓,西南处略陡。2#弃土场为沟道形,总占地面积为14 653.3 m2,场内高程为248~276 m,总体地势复杂,由北至南高程逐渐降低,呈九级台阶地形分布。

图1 研究区卫星影像
1.3 试验设备与软件工具
采用DJI Phantom 4Pro消费级四旋翼无人机获取航图,该无人机集飞行平台、动力系统、控制系统、云台相机于一体,配有遥控器与飞控软件。其相机为FC6310单镜头,采用1英寸CMOS影像传感器(1 inch=2.54 cm),有效像素为2000万,镜头焦距为8.8 mm/24 mm(35 mm格式等效),云台可控俯仰角范围为-90°~+30°,控制精度为±0.02°,能够在飞行中拍摄稳定的图像。
通过上海华测导航X9 RTK测量系统测量地面像控点的三维坐标,使用CORS模式时平面定位精度为8 mm+1×10-6D,高程定位精度为15 mm+1×10-6D,D为基站距离。使用与无人机POS数据相同的WGS-84坐标系。
弃土场三维模型的构建采用Metashape软件(原Photoscan),该软件基于最新的运动恢复结构——多视图立体匹配(SfM-MVS)算法,对未经畸变校正的影像和控制点进行特征点提取与匹配、空中三角测量,自动化地完成相机参数解算与三维模型重建。
1.4 无人机航测方案设计
根据《低空数字航摄与处理规范》(GB/T 39612—2020)[20]中对航摄影像分辨率及航线重叠度的相关要求,综合考虑地形条件、飞行效率,设置飞行高度相对测区最低点为100 m,航向重叠度为80%,旁向重叠度为70%。根据前人的经验[19],单镜头无人机倾斜摄影规划5次航线,航线1云台垂直正射采集正射影像,依次航线2、3、4、5调节云台俯仰角为-45°,分别从东、南、西、北方向采集倾斜航片。在弃土场内均匀布设地面标志作为像控点,根据无人机航测的最优控制点方案[21]选取四周和区域中心的6个像控点作为控制点参与空三解算,其他像控点作为精度评估的检查点使用。各弃土场具体航测方案见表1。

表1 弃土场航测方案
1.5 精度评价指标
目前,通常以像控点的误差作为航空摄影测量的评价指标。具体而言,基于航空摄影测量成果,识别出各像控点并提取其三维坐标,以RTK测量系统测量的三维坐标为真值,对比分析得到各像控点在X、Y、Z方向的误差,计算平面和高程的均方根误差(RMSE)作为整体精度的评价指标。根据《低空数字航空摄影测量内业规范》(CH/T 3003—2021)[1]1∶500比例成图中规定的误差标准评价消费级无人机航空摄影测量的精度。计算公式为
(2)
(3)
(4)
(5)
式中,Xi、Yi、Zi为第i个像控点的三维坐标;(XRTKi,YRTKi,ZRTKi)为RTK测量系统测量得到的第i个像控点的三维坐标;RMSEX,RMSEY、RMSEZ、RMSEH分别为X、Y、Z及高程的均方根误差;n为像控点个数。
2 结果与分析
2.1 航测整体精度分析与评估
首先统计两个弃土场两种摄影测量方式下控制点和检查点在X(经度)、Y(纬度)、Z(高程)方向的误差,生成各个方向上的误差箱线(如图2所示),对各摄影测量整体的精度进行分析。由图2(a)—(b)可知:①1#弃土场分别通过正射和倾斜摄影进行空中三角测量时,检查点与控制点在X、Y方向上的误差分布范围小且无较大差异;②在Z方向上,正射航测的检查点比控制点误差分布范围显著较宽,倾斜航测的检查点误差分布范围显著降低,略大于控制点的误差分布范围。这说明在1#弃土场中,倾斜航测相较于正射在平面位置的精度基本接近,而在高程上前者具有较高的精度提升。

图2 各航测方式中控制点和检查点在X、Y、Z方向上误差的箱线
由图2(c)—(d)可知:①2#弃土场在正射航测时,检查点X方向上的误差分布范围在控制点X方向上的误差分布范围之内,而检查点和控制点在Y、Z方向上的误差分布范围均较广且具有差异。②2#弃土场在倾斜航测时,检查点与控制点在X、Y、Z方向上的误差分布范围均较小且无明显差异。这说明在2#弃土场中,正射摄影测量在平面位置和高程位置上的精度较低,而倾斜摄影测量成果精度能显著改善。根据《低空数字航空摄影测量内业规范》(CH/T 3003—2021)[1]1∶500比例成图规定,以控制点合格数量和检查点均方根误差对各航测成果整体精度进行评估,结果见表2。
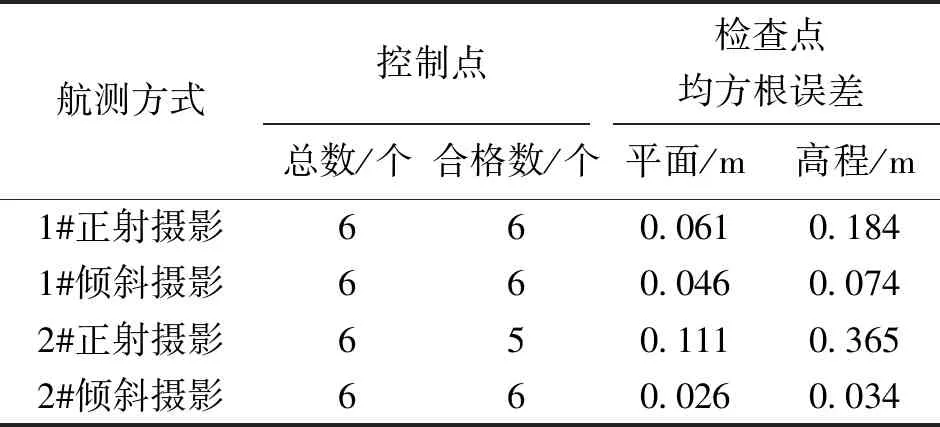
表2 各航测方式整体精度评估
2#弃土场正射摄影测量的整体精度最低,其6个控制点中有1个不符合精度要求,检查点平面位置的均方根误差为11.1 cm,高程的均方根误差为36.5 cm,超出了0.28 m的规定;其他航测成果的精度均符合规定的要求,2#弃土场倾斜摄影测量的整体精度最高,检查点平面位置和高程的均方根误差在5 cm内,相较于正射,检查点平面位置均方根误差低76.70%,高程均方根误差低90.68%。1#弃土场正射摄影测量的检查点平面位置均方根误差为6.1 cm,高程均方根误差为18.4 cm,而倾斜摄影测量的检查点平面位置和高程的均方根误差分布分别为4.6和7.4 cm,相较于正射,分别低25.19%和59.82%。与1#弃土场相比,2#弃土场正射航测的检查点平面位置和高程的均方根误差分别高82.31%和98.06%,倾斜航测的平面位置和高程的均方根误差分别低43.21%和54.03%。
因此,倾斜摄影相比于正射摄影整体在平面和高程上具有不同程度的精度优势,在高程上更为明显;2#弃土场相较于1#具有更复杂的地形条件,对正射摄影测量整体精度影响显著。
2.2 检查点精度分析与评估
为进一步分析各航测成果的精度,对各成果内检查点的坐标与RTK实测坐标进行对比,得到各航测成果检查点的残差,如图3—图5所示。

图3 各航测成果检查点误差
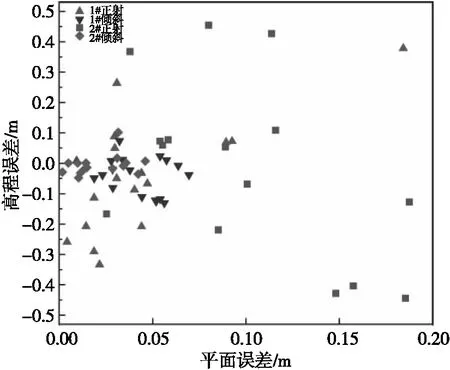
图4 各航测成果检查点平面与高程误差
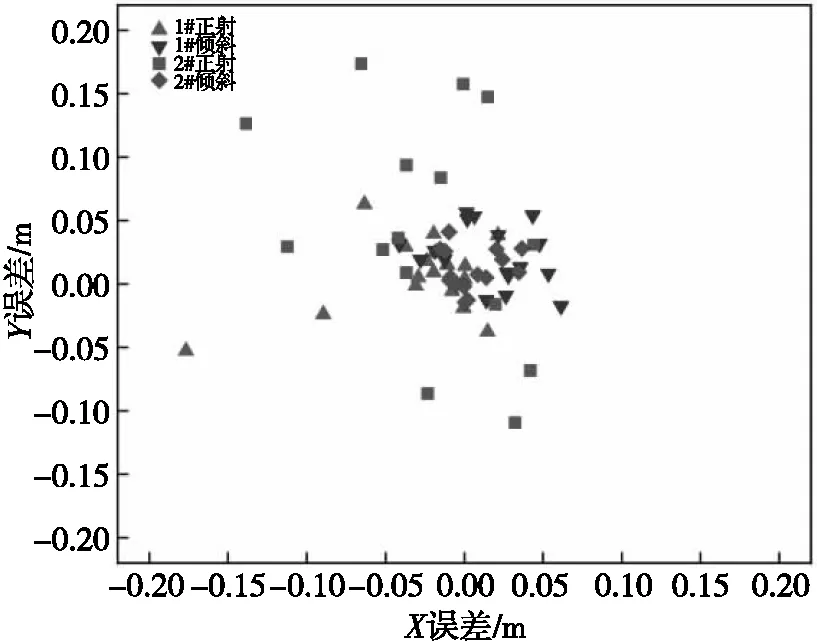
图5 各航测成果检查点X与Y方向误差
2#弃土场倾斜航测的各检查点误差集中分布在坐标原点,1#弃土场倾斜航测次之;而2#弃土场正射航测的各检查点误差分散在外围,1#弃土场正射航测的检查点误差分布在外围的较少;正射摄影测量的检查点在高程上的误差要显著大于平面的误差。
根据《低空数字航空摄影测量内业规范》(CH/T 3003—2021)[1]1∶500比例成图规定,以平面和高程误差的范围和合格率对各航测方式检查点的精度进行评估,结果见表3。

表3 各航测方式检查点精度评估 (%)
在平面误差方面:各弃土场空中三角测量后检查点平面误差均符合规定的要求,1#弃土场通过正射摄影测量后平面误差在10 cm以下的检查点占94.12%,大于10 cm的占5.88%(仅1个),通过倾斜摄影测量后的检查点平面误差均小于10 cm;2#弃土场通过正射摄影测量的平面误差在10 cm以下的检查点占53.33%,大于10 cm的占46.67%,通过倾斜摄影测量后检查点平面误差均小于10 cm。
在高程误差方面:1#弃土场通过正射摄影测量后高程误差符合规定的检查点占94.12%,小于10 cm的占52.94%,大于10 cm的占47.06%,通过倾斜摄影测量的检查点高程误差均符合规定的要求,小于10 cm的检查点占70.59%,大于10 cm的占29.41%;2#弃土场通过正射摄影测量后高程误差符合规定的检查点仅占60.00%,小于10 cm的检查点占33.33%,大于10 cm的占66.67%,通过倾斜摄影测量的检查点高程误差均符合规定的要求,小于10 cm的检查点占93.33%,大于10 cm的占6.67%(仅1个)。
因此,各航测成果的检查点误差在高程位置要大于平面位置,这一差异在正射摄影测量中更为明显;倾斜摄影测量的检查点平面与高程精度均高于正射摄影测量,平面精度可由分米级小幅度提升至厘米级,高程精度大幅度提升至厘米级;复杂地形区域对正射摄影测量的检查点精度影响显著,在高程方面更为明显。
2.3 三维模型构建
对各弃土场空中三角测量加密解算生成的特征点云成果通过多视图立体匹配 (MVS)算法构建三维模型,如图6所示。由正射摄影测量构建的三维模型在地形起伏区域噪声点较多,甚至出现轻微扭曲、形变的情况(如图6(a)和(c)所示),而由倾斜摄影测量构建的三维模型则没有出现上述情况(如图6(b)和(d)所示)。对各弃土场空中三角测量提取的特征点进行分析(如图6(c)、(d)、(g)、(h)所示)可知,通过正射摄影三维重建提取的特征点较稀疏,1#和2#弃土场特征点密度分别为5.01和6.29个/m2;而通过倾斜摄影三维重建时特征点数量能显著提升,1#和2#弃土场特征点密度分别为24.19和27.32个/m2。由此可知,在弃土场这种纹理单一、重复的地形条件下,通过正射空三加密解算后匹配的点云数量,不足以对弃土场的地形精确而细致的表达,这导致三维模型出现较多噪声点甚至扭曲、形变。倾斜摄影从竖直、倾斜等5个角度采集地物信息,因此可以提取足够的特征点,使匹配的密集点云对地形进行详尽的表达。
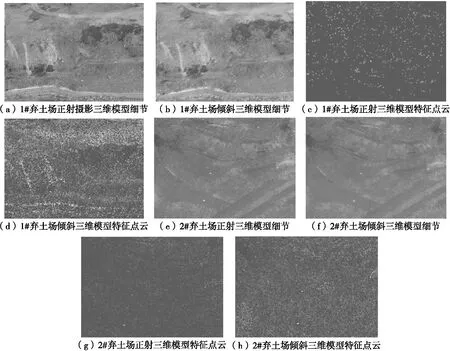
图6 各三维模型对比
3 结 论
本文量化分析了消费级无人机在不同弃土场应用正射和倾斜两种摄影测量模式,以及根据摄影测量成果重建三维模型,结论如下:
(1)在丘陵地区,无论是正射模式还是倾斜模式,消费级无人机摄影测量成果的高程精度要低于平面的精度。正射摄影测量成果的精度受地形条件影响显著,地形复杂、落差较大区域的精度不能满足《低空数字航空摄影测量内业规范》中1∶500比例的成图精度要求。
(2)倾斜摄影能够消减地形条件对测量成果的影响,相比于正射影像具有更高的精度优势,使平面精度由分米级小幅度提升至厘米级,高程精度大幅度提升至厘米级,完全符合《低空数字航空摄影测量内业规范》中1∶500比例的成图精度要求。
(3)消费级无人机倾斜摄影测量从五个角度采集地物信息,构建三维模型时提取特征点数量显著提升,能对弃土场地形进行精确而细致的表达。
本文数据采集及内业处理耗时2 d,所用无人机系统价格约在万元;消费级无人机进行倾斜摄影测量能节省大量成本、降低工作门槛,试验评估了其在丘陵地区进行1∶500比例成图测量精度的可靠性,为公路建设项目弃土场快速监测提供参考。
猜你喜欢
建筑与装饰(2023年12期)2023-07-03
中学生数理化·七年级数学人教版(2023年3期)2023-03-21
中外公路(2022年5期)2022-11-08
交通科技与管理(2022年17期)2022-09-08
计算机系统应用(2022年4期)2022-05-10
天津医科大学学报(2021年4期)2021-08-21
国际呼吸杂志(2019年4期)2019-03-12
自动化学报(2017年2期)2017-04-04
中学生数理化·七年级数学人教版(2016年2期)2016-05-30
现代计算机(2015年31期)2015-09-28