基于无人机遥感的大坡度地质露头岩性分类
2023-12-08 10:02陈宗强刘善伟
测绘通报 2023年11期
常 乐,韩 磊,陈宗强,盛 辉,刘善伟
(1.青岛市勘察测绘研究院,山东 青岛 266033; 2.中国石油大学(华东)海洋与空间信息学院,山东 青岛266580; 3. 海陆地理信息集成与应用国家地方联合工程研究中心(青岛),山东 青岛 266033)
地下岩体、地层、矿床等露出地表后形成野外地质露头,其中蕴含着丰富的地质信息[1]。地质露头研究是地质工作者的必修课,其中地质露头岩性识别是地质学的一个重要研究领域,同时也是地质调查的一项重要工作。
岩石岩性是反映岩石特征的属性,如颜色、成分、结构及特殊矿物等[2]。传统的地质露头岩性判别方法主要依靠野外地质调查,由外业人员通过野外踏勘采集岩石岩性样本,然后带回实验室进行分析,最后由人工填图,整个识别过程费时费力;且野外地质露头大多垂直于地面且跨度、高度较大,有些区域地质人员无法到达,导致地质露头的岩性难以判别。国内外诸多学者提出了多种方法进行岩石岩性分类,如物理实验方法[3-4]、数学统计分析方法[5-7]、智能学习方法[8-9]等。物理实验方法和数学统计分析方法对岩石岩性分析具有较好的效果,但需要在众多特征中找出规律,主观性强,要求研究人员具有专业的理论水平。
随着图像处理和遥感技术的不断发展,其相关技术和算法在岩性识别中得到了广泛应用。如文献[10—14]通过机器学习算法对岩石岩性图像进行分类,并取得了较好的分类精度。但大部分的岩性分类研究主要以遥感影像或岩石图像为数据源,而大坡度地质露头大多垂直于地面,卫星遥感数据受限于角度,无法有效采集地质露头数据。当前无人机多光谱数据获取便捷、成本低、空间分辨率高,给大坡度地质露头岩性分类带来新的遥感数据源[15]。部分学者将深度学习引入岩性分类,但大多基于卷积神经网络的分类模型,只考虑光谱信息,忽略了空间信息对岩性分类的增强作用。无人机多光谱影像中具有丰富空间信息和光谱信息,如何有效地利用这些信息进行高精度的岩性分类是一个亟待解决的问题。
针对以上问题,本文首先使用多光谱无人机,以贴近摄影测量[16]的方式采集地质露头数据,利用面向对象的分类方法提取岩石分布的精确区域;然后基于此区域采用多尺度混合特征网络模型进行岩性分类,并与SVM、MLC、Inception V3、ResNet16和Hybrid CNN模型进行精度对比;最后在河南云台山地区进行应用,实现高精度的自动化岩性分类,以期为野外地质调查、地质填图、岩性分类提供可行的参考。
1 试验区域与数据
1.1 研究区域概况
云台山公园位于山西省晋城市和河南省焦作市交界处。云台山峡谷出露的地层主要为中元古届云梦山组和古生届寒武系-奥陶系,其中中元古届云梦山组红色石英砂岩构成了峡谷内的主要景观。试验对象高300 m,长700 m,平均坡度大于85°,主要以肉红色石英砂岩、紫红色石英砂岩和深紫色石英砂岩3种岩石为主。如图1所示。
1.2 数据采集方案
本次试验采集设备为大疆P4 Multispectral,该无人机重1487 g,最大飞行速度为72 km/h,最长飞行时间为27 min,悬停定位精度能达到毫米级,通过云台搭载集成镜头,包括1个用于可见光成像的彩色传感器和5个用于多光谱的单色传感器(蓝(B):450±16 nm;绿(G):560±16 nm;红(R):650±16 nm;红边(RE):730±16 nm;近红外(NIR):840±16 nm),传感器所获图像的有效像素为208万,分辨率为1600×1300像素。
无人机通过贴近摄影测量的方式进行数据采集,在数据采集过程中始终保持无人机镜头垂直于露头剖面,在光照条件不充足时,可适当调整镜头角度。无人机手控飞行路线如图2所示,箭头为无人机移动方向。飞行需要确定的参数如下。

图2 无人机手控飞行路线
无人机采集超高精度的影像时与露头剖面的距离公式为
(1)
式中,L为无人机镜头与露头剖面间的距离(m);GSD为地面分辨率(mm);d为相机传感器的像元大小;f为相机的焦距(mm)[17]。
航线上无人机的飞行速度根据标准航线重叠度(80%)进行计算,公式为
V=(0.2·W1·L)/(T·f)
(2)
式中,W1为相机飞行航线方向上的传感器宽度(mm);T为影像采集的时间间隔(s)。
无人机飞行时两条航线之间的距离公式为
S=(0.3·W2·L)/f
(3)
式中,S为两条航线之间的距离;W2为与无人机飞行航线方向垂直方向的传感器宽度(mm)。
1.3 数据预处理
飞行前后设置地面辐射标定板,用于后期影像辐射校正,飞行中保证航线重叠度和旁向重叠度大于80%,共获取多光谱图像9750张。通过Agisoft Metashape软件进行影像拼接,经辐射校正处理得到5个波段的多光谱图像,影像分辨率为0.03 m。
2 研究方法
无人机影像内除主要研究对象岩石外,还有大量植物覆盖及岩层间的裂缝产生的阴影。若不剔除植物和阴影,将影响岩性分类的结果。因此,在进行岩性分类前,应首先去除植物和阴影,确定岩石的空间分布区域。然后在岩石分布区域内通过目视解译方式提取3种岩石的样本点,以选取的样本点为中心向外扩展成25×25像素大小的图像,图像的类别由中心像素点的类别决定。所有样本按照7∶2∶1的比例分为训练集、测试集、验证集,利用本文多尺度混合特征分类模型和多种分类模型进行分类。最后选取研究区域内的岩层分布清晰区域进行精度对比。本文的技术路线如图3所示。
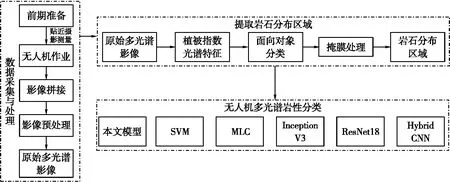
图3 技术路线
2.1 基于面向对象的岩石分布区域提取
遥感图像分类中大多是基于像素的分类方法,很少考虑地物的空间特征,忽略相邻像素的相互关系,这不可避免地导致在分类结果中出现碎斑现象,分类效果较差。面向对象的分类方法以影像分割后多个像素组成的对象为分类目标,在分类过程中面向对象操作的是有意义的影像对象,而不是单个的像素,充分考虑了光谱特征和对象的空间特征,克服了基于像素分类方法的缺点。因此,本文采用基于面向对象的分类方法提取岩石精确的分布区域。为了消除植被影响,选取归一化植被指数(NDVI)、差值植被指数(DVI)、比值植被指数(RVI),以及5个光谱波段作为分类特征。
(1)归一化植被指数。归一化植被指数特征可通过增加植被之间的光谱差异,增强植被信息,抑制非植被的信息,常被用于检测植被生长状况、植被覆盖度等,计算公式为
(4)
式中,NIR和R分别表示近红外波段和红波段的反射率。
(2)差值植被指数。差值植被指数也可增强植被信息,反映土壤与植被的覆盖面积,其计算公式为
DVI=NIR-R
(5)
(3)比值植被指数。其计算公式为
(6)
2.2 多尺度混合特征网络模型
卷积神经网络主要分为一维卷积神经网络、二维卷积神经网络、三维卷积神经网络。大部分的经典网络模型都是二维卷积神经网络,只能提取空间特征,无法有效利用光谱特征。三维卷积神经网络可以提取空间特征和光谱特征,但计算量大。
为了充分利用二维卷积神经网络和三维卷积神经网络提取不同特征的能力,文献[18]提出了一个混合特征学习框架(Hybrid CNN)。该学习框架将三维卷积核和二维卷积核混合使用,可以有效利用图像中的光谱特征和空间特征,同时减小了计算量。本文在混合特征学习框架的基础上,提出了一种多尺度混合特征网络模型(如图4所示)。它将三维卷积神经网络与二维卷积神经网络相结合,充分利用光谱和空间信息,同时扩展分支,加入不同尺度的卷积核,获取不同粒度的局部相关性,得到多尺度的特征信息,实现更高精度的分类结果。
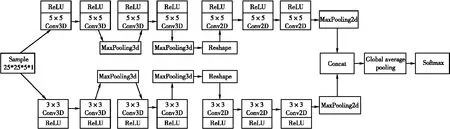
图4 多尺度混合特征网络模型
由图4可知,在多尺度混合特征网络模型中使用了3×3和5×5不同尺度的卷积核,并在两个分支中都使用了混合特征学习框架。在三维卷积阶段,对输入的光谱特征进行3次三维卷积,在不损失大量光谱信息的情况下,将输出特征进行Reshape操作,方便后续进行二维卷积获取不同光谱波段的空间信息;然后将不同尺度的光谱-空间特征进行串联叠加,并进行GAP操作,完成最后的分类。
在原始混合特征学习框架的分类阶段,提取特征后连接了3个全连接层,而本文多尺度混合特征模型中的混合特征学习框架利用GAP操作替代全连接层。引入GAP操作可以使模型具有全局的感受野,使低层网络也能够利用全局信息,更加直观地展示各类别与特征图之间的联系,使得特征图转化为分类概率也相对容易;此外,GAP层中没有需要调整的参数,也简化了计算量和参数量,使模型更加稳健,不易产生过拟合的现象。
3 试验结果
3.1 提取岩石分布区域结果
无人机多光谱影像作为分类对象,以提出的植被指数和影像的5个光谱波段为分类特征,利用面向对象的分类方法进行分类,确定岩石的分布区域。
面向对象分类的主要步骤为:基于无人机影像,首先进行尺度分割,选取训练样本,添加上述分类特征进行分类;经过反复试验,影像分割时的分割尺度为150,颜色因子设置为0.6,紧密度设置为0.8,影像分割效果最佳。样本选取与影像分割结果如图5示。
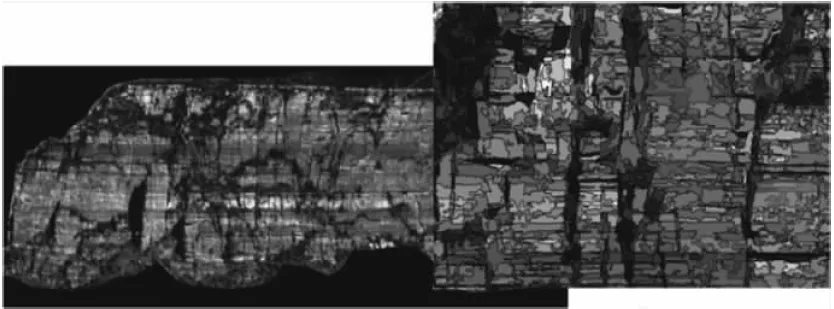
图5 样本选取与分割结果
图6为利用面向对象的分类方法对无人机影像进行分类的结果。可以看出,面向对象的分类结果非常接近露头实际情况。
为了能够直观地反映面向对象分类方法对岩石分布区域的精度,计算分类混淆矩阵。各地物的分类精度见表1。Kappa系数为0.87。
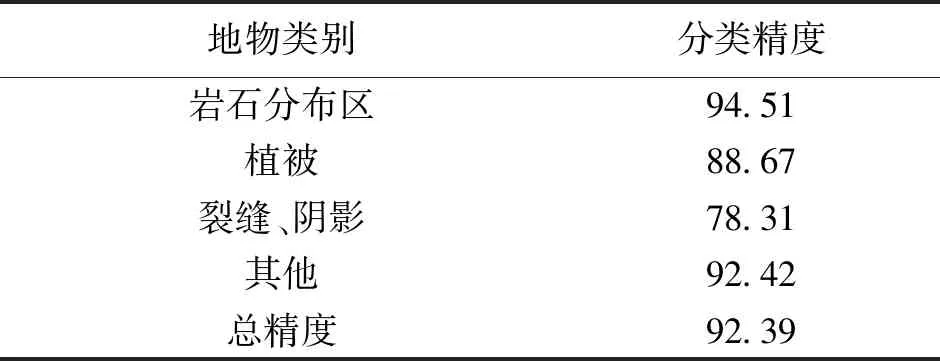
表1 分类精度 (%)
可以看出,面向对象的分类方法能够准确地提取岩石的分布区域。光谱指数的选择可以有效突出植被信息,将得到的分类图像进行分类后处理,并利用得到的岩性分布区域进行掩膜处理,得到岩石分布区域,如图7所示。
图7 岩石分布区域
3.2 岩石岩性分类结果
以提取的岩石分布区域作为岩性分类数据,以3类岩石的样本点为中心,向外扩展成25×25像素大小的图像,图像的类别由中心像素点的类别决定,共4888个训练样本。所有训练样本按照7∶2∶1的比例分为训练集、测试集、验证集。利用本文提出的多尺度混合特征网络模型进行训练和分类,并与卷积神经网络模Inception V3、ResNet18、Hybrid CNN,以及传统机器学习分类模型SVM、MLC进行精度对比。
试验采用Sgdm优化器进行更新,L2范数项的系数为0.004,采用批量训练的方法训练模型,每个批次训练的样本数为64个,共迭代50次,初始学习率设置为0.000 1。试验环境为Matlab 2021a,计算机配置如下:CPU为i5-10300H,内存为16 GB,GPU为NVIDIA GeForce GTX 1650。该模型运行时具体网络结构结果见表2。
利用本文多尺度混合特征网络模型进行训练和分类,并与卷积神经网络模Inception V3、ResNet18、Hybrid CNN,以及传统机器学习分类模型SVM、MLC进行精度对比,岩性分类结果如图8所示。
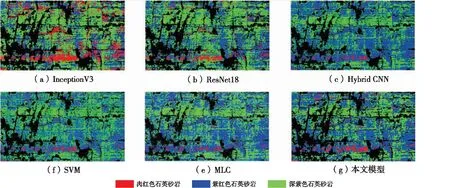
图8 岩性分类结果
选择总体分类精度及Kappa系数作为验证区域精度主要评价指标,分类精确率对比见表3。通过比较不同模型的分类精度可知,SVM和MLC的总体分类精度较低,分别为75.10%、76.74%,Kappa系数分别为0.62、0.64。Inception V3和ResNet18的总体分类精度和Kappa系数有所上升,但整体分类精度依旧偏低。Hybrid CNN和本文模型由于三维卷积核的加入,可以充分提取空间特征和光谱特征,总体分类精度和Kappa系数大幅提升。最终试验结果表明,多尺度混合特征网络模型相比于其他分类模型,在总体精度和Kappa系数上都达到最优,分别为89.91%、0.85。

表3 分类精确率对比
4 结 论
本文针对大坡度地质露头,利用无人机采集岩性数据,提出了多尺度混合特征网络模型,通过对比分类精度,得到以下结论。
(1)针对大坡度地质露头的特点,采用无人机与贴近摄影测量技术相结合的方法,在采集地质露头数据中具有较强的可行性和优势。
(2)以植被指数和光谱特征为分类特征,利用面向对象的分类方法,可以有效地区分植被与岩石,提取岩石精确的分布区域。
(3)本文多尺度混合特征网络模型与InceptionV3、ResNet18、SVM和MLC相比,可以充分提取多光谱图像中的光谱特征和空间特征,在总体分类精度、3类岩石分类精度及Kappa系数上均达到更高的精度,其中总体分类精度为89.91%,Kappa系数为0.85。
猜你喜欢
小学科学(学生版)(2021年7期)2021-07-28
云南化工(2020年11期)2021-01-14
小学科学(学生版)(2020年11期)2020-12-14
内蒙古民族大学学报(社会科学版)(2020年2期)2020-11-06
小学科学(学生版)(2020年10期)2020-10-28
小学生必读(低年级版)(2019年5期)2019-08-30
录井工程(2017年1期)2017-07-31
太空探索(2016年5期)2016-07-12
时代英语·高三(2014年5期)2014-08-26
石油化工应用(2014年12期)2014-03-11