融合联合反向学习与宿主切换机制的䲟鱼优化算法
2023-12-08 11:48贾鹤鸣文昌盛饶洪华刘庆鑫力尚龙
计算机与生活 2023年12期
贾鹤鸣,文昌盛,吴 迪,饶洪华,刘庆鑫,力尚龙
1.三明学院 信息工程学院,福建 三明 365004
2.三明学院 教育与音乐学院,福建 三明 365004
3.海南大学 计算机科学与技术学院,海口 570228
优化通常用来在特定问题中找到最佳的解决方案,然而随着科学技术的持续发展,实际问题的复杂性不断提高,对优化技术的需求愈发明显。元启发式优化算法由于其简单性、灵活性和无推导机制受到了众多学者的关注。近十年来提出了诸多元启发式优化算法如灰狼优化算法(grey wolf optimizer,GWO)[1]、蛇优化算法(snake optimizer,SO)[2]、黏菌优化算法(slime mould algorithm,SMA)[3]、正余弦优化算法(sine cosine algorithm,SCA)[4]、哈里斯鹰优化算法(harris hawks optimization,HHO)[5]、算术优化算法(arithmetic optimization algorithm,AOA)[6]等,并利用它们解决了许多复杂的工程问题。但是,根据无免费午餐(no-free-lunch,NFL)定理[7],如果一个算法对一类问题的平均表现特别好,那么它必须在剩下的问题上的平均表现更差。因此没有一种优化算法可以解决所有问题,对算法的优化和进一步改进就显得十分重要[8-9]。常见的优化方法有很多,有对种群初始化的方式进行优化,例如混沌精英初始化[10];更为有效的是对算法本身进行优化,例如反向学习策略[11]、变异策略[12]、重启策略[13]和融合算法[14]等,许多算法进行优化之后,搜索能力都得到加强,能够解决更加复杂的实际问题[15-16]。
综合参考上述关于ROA 的改进,针对ROA 存在的问题,本文提出了一种融合联合反向学习与宿主切换机制的䲟鱼优化算法(improved remora optimization algorithm,IROA)。在探索阶段加入宿主切换机制,随机选择旗鱼和白鲸作为宿主,提高了ROA的探索能力;同时加入联合反向学习策略,有效防止算法陷入局部最优,更好地平衡了算法的探索与开发阶段。通过以上两种策略的综合作用,提高了ROA的寻优能力和收敛精度,加强了算法的全局搜索能力。仿真实验选取CEC2020来测试IROA的性能,同时选取汽车防碰撞设计问题进行测试,实验结果进一步验证了IROA的鲁棒性与工程适用性。
1 䲟鱼优化算法
䲟鱼优化算法的灵感来源于海洋中䲟鱼的寄生行为。为了免受敌人的入侵,同时也为了节省体力,䲟鱼会寄生在宿主身上跟随宿主移动。鱼优化算法有两个阶段,即探索阶段和开发阶段。探索阶段鱼会吸附在旗鱼身上,旗鱼是海洋中速度最快的鱼,它们通常会成群捕猎,它们特有的狩猎方法是轮流攻击精英战术;开发阶段䲟鱼会吸附在鲸鱼身上,鲸鱼的体积大,经常单独捕猎。䲟鱼优化算法提取了旗鱼优化算法中旗鱼的更新公式和鲸鱼优化算法中鲸鱼气泡网攻击法作为䲟鱼的运动公式。此外,当周围食物变少时,䲟鱼会选择更换宿主。为了确定是否需要更换宿主,还需要围绕宿主进行小范围移动,即经验攻击。如果不改变宿主,则会通过宿主获得食物,即宿主觅食模式。
1.1 初始化种群
在ROA中,初始化䲟鱼种群位置的计算公式如下:
其中,Ri,j表示䲟鱼i在第j维度的位置,ubj和lbj分别表示搜索空间的上界和下界,r1为0 到1 之间的随机数。
1.2 自由旅行(探索阶段)
1.2.1 旗鱼策略
当䲟鱼吸附在旗鱼身上时,䲟鱼会跟随旗鱼移动,可以认为䲟鱼的位置更新与旗鱼同步。此外,基于旗鱼优化算法的精英策略,对其位置更新进行了改进,其计算公式如下:
式中,t为当前迭代次数,Rit+1表示更新之后的䲟鱼个体i的位置,RBestt表示更新之前最优个体的位置,rand函数可以产生0 到1 之间的随机数,Rrandt为更新之前䲟鱼个体的随机位置。
1.2.2 经验攻击
䲟鱼吸附在宿主身上时,还会在宿主周围进行小范围的试探性移动,判断是否需要更换宿主。该过程类似经验上的积累。对以上思想建立数学模型,其计算公式如下:
式中,Rpre表示上一代鱼的位置,可以看作一种经验;Ratt是鱼基于经验的一次试探性小范围移动。这种机制通过randn函数在当前位置和上一代位置之间随机生成一个新位置Ratt,通过比较Ratt与当前位置的适应度判断宿主周围食物是否充足,是否需要更换宿主。
更换宿主的公式如下:
式中,H(i)决定了鱼的宿主,初始为0 或者1,若H(i)等于0,则吸附鲸鱼,若H(i)等于1,则吸附旗鱼,round 为四舍五入的函数,f()和f(Ratt)分别为与Ratt的适应度值。
1.3 细细品味(开发阶段)
1.3.1 鲸鱼策略
其中,D表示位置更新前的最优位置与当前位置之间的距离,k为-1 到1 之间的随机数,a在迭代中会在[-2,1]之间线性递减,T为最大迭代次数。
1.3.2 宿主觅食
宿主觅食是开发阶段的进一步细分,这个阶段最佳搜索空间缩减为宿主的位置空间,此时鱼在宿主周围进行小范围移动,其具体计算公式如下所示:
其中,A代表鱼的移动距离,其值和鱼与宿主的位置空间有关;为了区分宿主和鱼在搜索空间中的位置,使用鱼因子C来缩小鱼的位置,本文C的值选取0.1;由于宿主的体积是随机的,用B模拟宿主的体积;V表示鱼的体积。
2 改进的䲟鱼优化算法
ROA 的机制简单,易于实现,并被广泛应用于解决优化问题,但面对复杂度较高的问题时,其探索能力较弱,全局搜索能力不足,容易出现陷入局部最优和收敛精度差的问题。虽然经验攻击有一定跳出局部最优的能力,但这仅是䲟鱼在宿主周围的一次试探性移动,搜索范围小且全局性有限。此外,探索阶段时鱼吸附在旗鱼身上,而旗鱼是群体捕食模式,受群体的影响可能性较大,容易陷入局部最优,致使探索能力不足。因此,本文提出了一种融合联合反向学习和宿主切换机制的䲟鱼优化算法,通过加入联合反向学习策略,提高算法跳出局部最优的能力;同时在探索阶段引入宿主切换机制,随机选择白鲸与旗鱼作为宿主,白鲸与旗鱼策略相互配合,能更加有效提升算法的搜索能力。
联合反向学习在加强了算法全局能力的同时,也能进行局部调整。宿主切换机制引入白鲸作为宿主,克服了原始ROA中旗鱼搜索跨度过大的缺点,使算法的全局搜索更加细致。综合两种策略,在提高ROA 全局性能的同时,也一定程度上提高了ROA 的开发能力。
2.1 联合反向学习
联合反向学习结合了选择性领先反向和动态反向的优势,有助于平衡算法的探索阶段与开发阶段,有效提高了算法的性能。选择性领先反向会对小于阈值的维度进行反向,个体位置的变化幅度较小,一定程度加强了算法的开发能力。动态反向是概率性的,并且会在搜索空间内大范围移动,有助于提高算法的全局性能,让算法跳出局部最优。两者结合而提出的联合反向相比传统的反向学习策略,在提高算法的全局性能的同时,也提高了算法的开发能力。
2.1.1 选择性领先反向
选择性领先反向是从选择性反向[22]思想扩展而来,通过计算当前个体与当前最优个体之间每个维度的距离,并与一个阈值做对比,分成近距离维度和远距离维度两组,同时通过斯皮尔曼的等级相关系数比较当前个体与最优个体的相关性,若相关性小于0,则对个体的近距离维度进行反向学习。相较于选择性反向对远距离维度进行反向学习,选择性领先反向的跨度较小,不易远离最优位置。
以二维问题为例,如图1 所示。B为当前最优个体,P1、P2、P3为当前个体,假设阈值为2,P1与B第一维度的距离为5,第二维度的距离为1,与阈值相比,第一维度之间的距离大于阈值,第二维度之间的距离小于阈值,因此仅对第二维度进行选择性领先反向;同理对于P2,仅需要对第一维度进行选择性领先反向,对于P3,第一维度与第二维度均需要进行选择性领先反向。
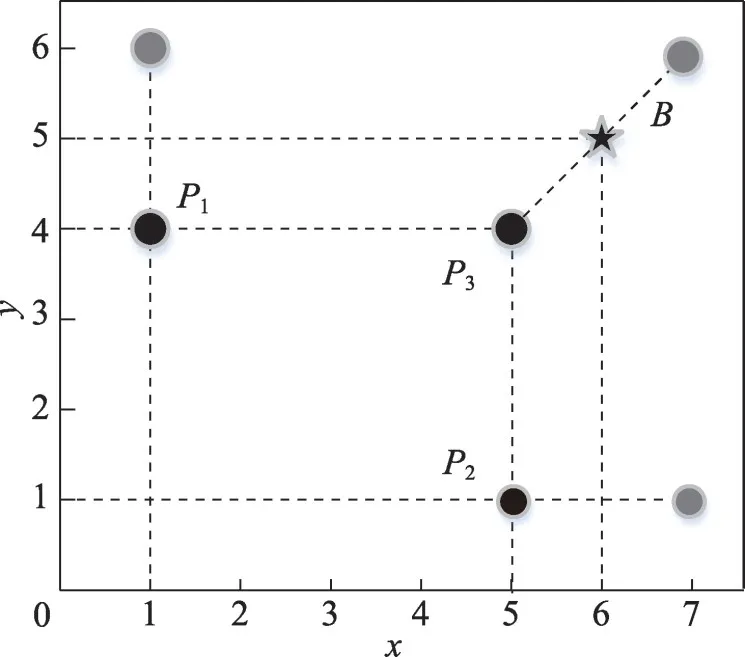
图1 选择性领先反向二维示意图Fig.1 Two dimensional schematic diagram of selective leading opposition
选择性领先反向的计算公式如下:
式中,Ri,dc为䲟鱼个体的近距离维度,为䲟鱼个体近距离维度的反向位置,src为斯皮尔曼等级相关系数,ddi,j为当前个体i在第j个维度上与当前最优个体的距离,size(dc)为个体近距离维度数量,size(df)为个体远距离维度数量。
计算个体的size(dc)和size(df)需要通过式(10)计算最优个体与当前个体之间每个维度的距离,并与阈值比较,大于或等于阈值的为远距离维度,小于阈值的为近距离维度,阈值通过式(9)来计算。
式中,RBest,jt为最优个体第j个维度的位置,Ri,jt为当前个体i在第j个维度的位置。
2.1.2 动态反向
动态反向是由Xu 等[21]融合准反向[23]与准反射[24]思想提出的,优点在于它能够动态地搜索空间,且在搜索空间中不对称地移动,有助于算法接近全局最优解,具体计算公式如下:
2.2 宿主切换机制
虽然旗鱼的游速快,但对解空间的搜索未必全面,而白鲸也是海洋中的一种生物群体,白鲸搜索时相对缓慢且仔细,与旗鱼相互协调能有效增强算法的全局搜索性能,因此本文在算法探索阶段加入宿主切换机制,使鱼能够随机选择两种宿主。鱼选择白鲸作为宿主的概率设为Pr,则选择旗鱼作为宿主的概率为1-Pr。为了更有效率地对搜索空间进行探索,将Pr的值设为0.5,3.8 节给出了Pr的敏感度分析。
当选择白鲸作为宿主时,参考了白鲸优化算法中探索阶段的更新公式。白鲸优化算法模拟了白鲸的捕食行为,其探索阶段是通过考虑白鲸的游泳行为建立的,通常为两对白鲸以同步或镜像的方式游泳。其计算公式如下:
若新位置超出边界,则通过式(15)将超出边界的维度拉回边界。
2.3 IROA 的伪代码与流程图
IROA 的伪代码如下所示:
IROA 的流程图如图2 所示。
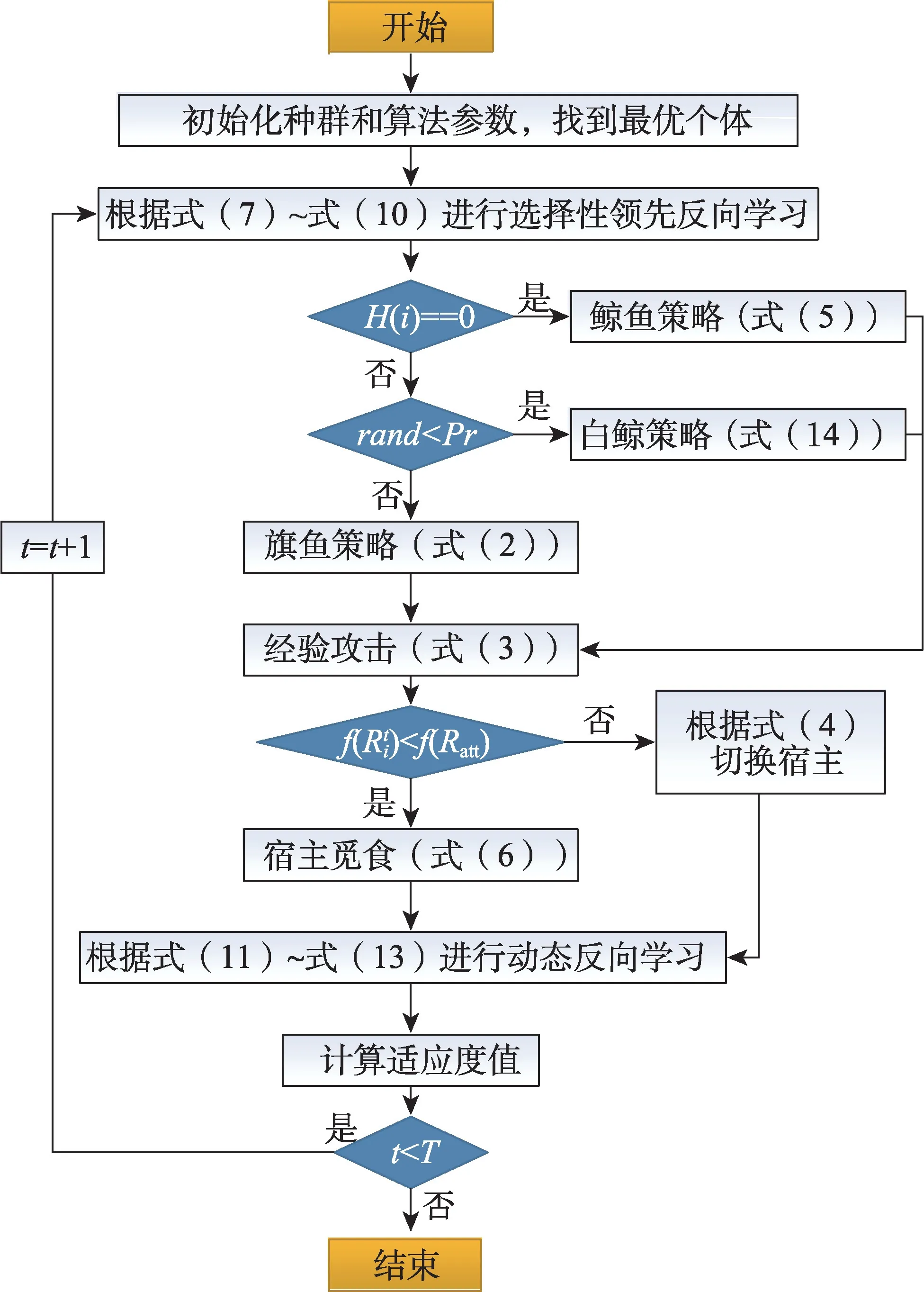
图2 IROA 的流程图Fig.2 Flow chart of IROA
2.4 计算复杂度分析
计算复杂度是评价一个算法的重要的指标,IROA 的复杂度主要来源于初始化、种群的位置更新和评估适应度值。种群初始化的复杂度为O(N×dim)。位置更新的复杂度包括多方面,寄生在旗鱼、鲸鱼和白鲸身上更新位置的复杂度为O(N×dim×T),其中N为种群大小,dim为维度,T为最大迭代次数;进行经验攻击的复杂度也为O(N×dim×T);宿主觅食是概率发生的,假设其复杂度最大,为O(N×dim×T);联合反向学习的复杂度根据文献[20]可知为O(N×T×(jr×dim+size(dc))),其中jr为跳跃率,size(dc)为个体近距离维度的数量。进行经验攻击、联合反向与更新最优位置都需要评估位置的适应度值,经验攻击后对新位置评估的复杂度为O(N×C×T),其中C为评价一个位置需要的复杂度;对联合反向生产的新位置进行评价的复杂度不确定,最大为O(N×C×T×(jr+1));更新最优位置时会对所有位置进行评估,其复杂度为O(N×C×T)。
综上所述,ROA的计算复杂度最大为O(N×T×(1+3×dim))+O(N×T×C×2),而IROA 的计算复杂度最大为O(N×T×(1+3×dim+jr×dim+size(dc)))+O(N×T×C×(3+jr)),相比于ROA,由于增加了联合反向学习策略,IROA 的复杂度虽然有所增加,但从第3 章的实验结果和第4 章的工程问题中可以看出,IROA 的性能也得到了较大提升。
3 实验与分析
本文实验均在主频为2.50 GHz 的11th Gen Intel®CoreTMi7-11700 处理器,16 GB 内存,操作系统为64 位Windows 11 的电脑上使用MATLAB2021a 完成。为了测试IROA 的性能,本文选取了CEC2020 的10 个测试函数进行仿真实验。其中F1 为单峰函数,F2~F3 为多峰函数,F4 为无峰函数,F5~F7 为混合函数,F8~F10 为复合函数。CEC2020 测试函数的详细信息如表1 所示。
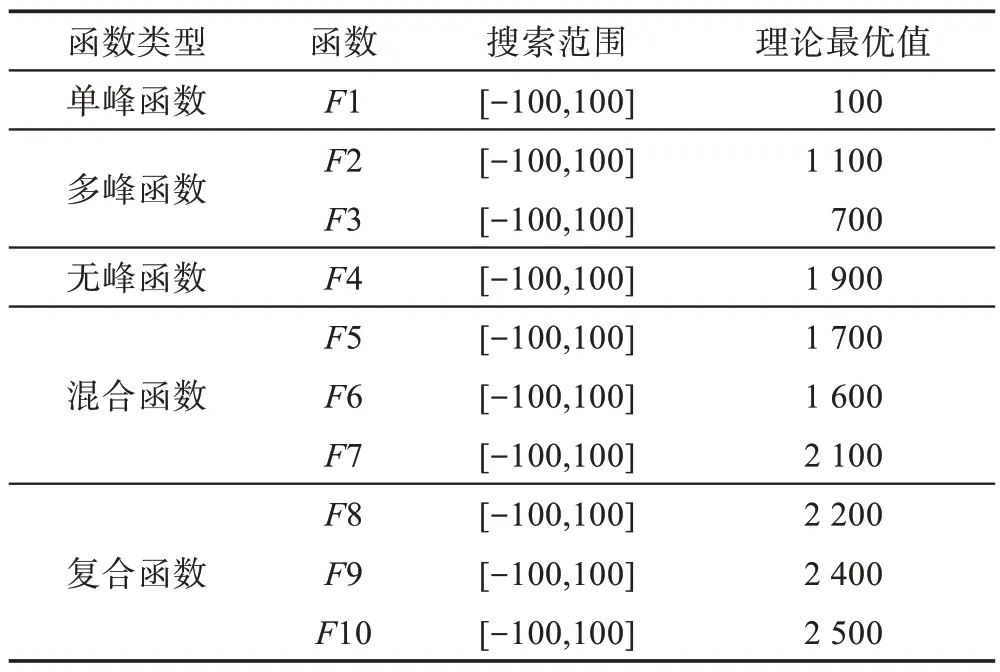
表1 CEC2020 测试函数Table 1 CEC2020 test functions
3.1 对比算法与参数设置
3.2 算法性能对比分析
IROA 与其他对比算法运行30 次得到的最优适应度值、平均适应度值和适应度值标准差如表3 和表4 所示,其中min 表示最优适应度值,mean 表示平均应度值、平均适应度值和适应度值标准差如表3和表4 所示,其中min 表示最优适应度值,mean 表示平均适应度值,std 表示适应度值标准差。在单峰函数F1中,IROA 相比ROA 寻优能力得到了显著的提升,在10维与100维中,相比其他算法,IROA在最优适应度值、平均适应度值和适应度值标准差都取得了最佳。在多峰函数F2 与F3 中,IROA 取得了最好的最优适应度值、平均适应度值,虽然适应度值标准差有所不足,但相较于ROA和BWO算法仍有较大提升。在无峰函数F4中,除了SCA、BES和WSO算法,其他算法都能稳定找到理论最优值。F5~F7为混合函数,虽然WSO 算法在10 维的F5 中的最优适应度值优于IROA,但在100 维的F5 中IROA 得到结果优于WSO算法的结果。在F6~F7 中,IROA 表现出的效果最优。在复合函数F8~F10 中,IROA 的整体性能依旧最优,虽然在部分函数中的适应度值标准差有所不足,但最优适应度值和平均适应度值依旧有较大优势。虽然100 维的CEC2020 测试函数更加复杂,但是IROA的整体性能依旧优于其他对比算法。
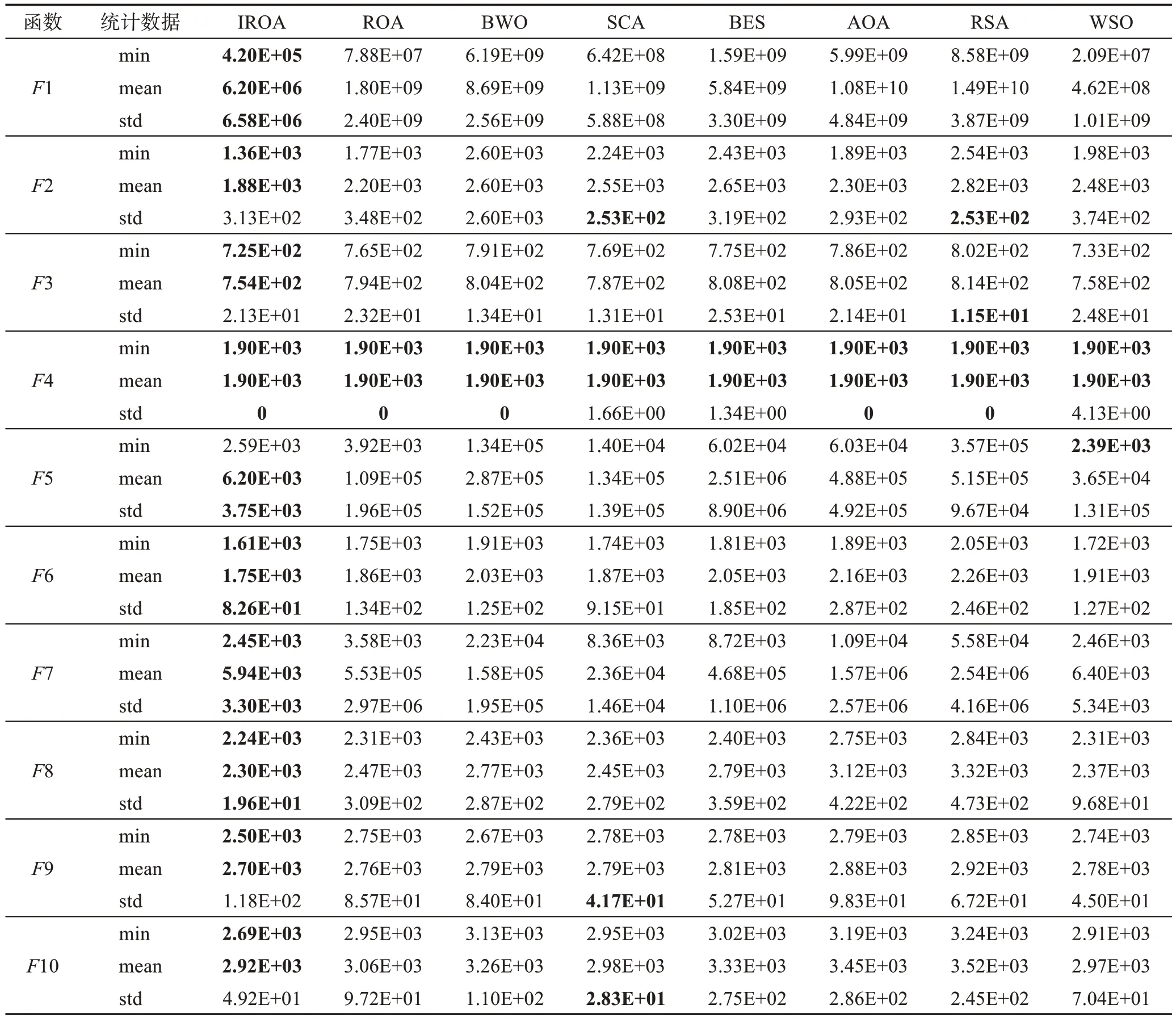
表3 各算法在CEC2020(dim=10)中的实验结果Table 3 Experimental results of each algorithm in CEC2020(dim=10)
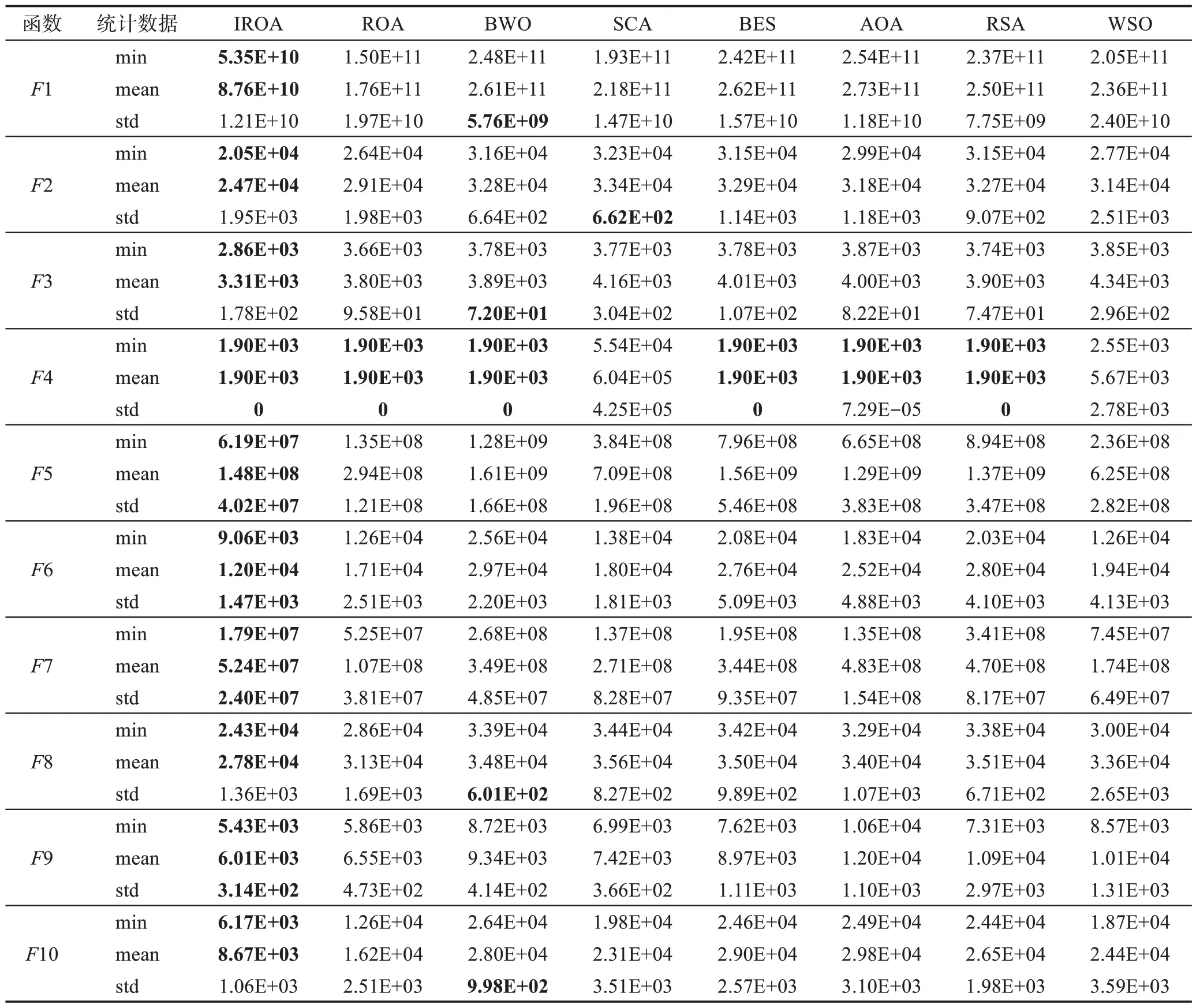
表4 各算法在CEC2020(dim=100)中的实验结果Table 4 Experimental results of each algorithm in CEC2020(dim=100)
3.3 收敛曲线分析
为了更加直观地比较各个算法的寻优能力,本文给出了IROA 和对比算法在CEC2020 测试函数的收敛曲线图,如图3和图4所示。
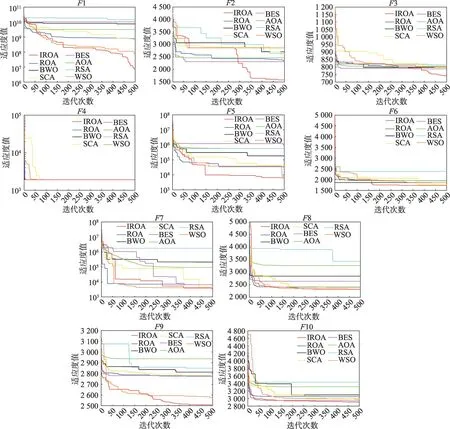
图3 各算法在CEC2020(dim=10)的收敛曲线Fig.3 Convergence curves of each algorithm in CEC2020(dim=10)
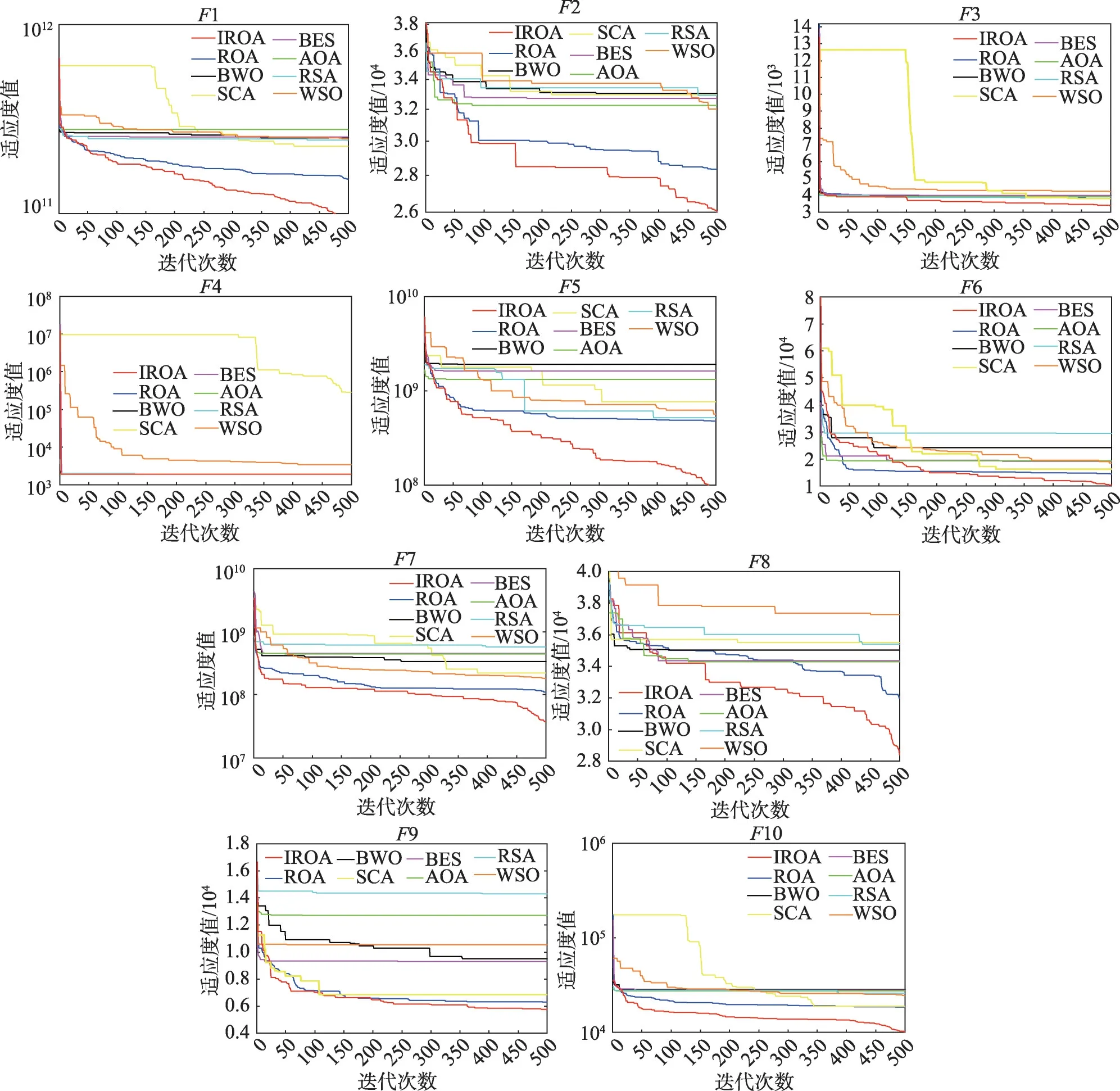
图4 各算法在CEC2020(dim=100)的收敛曲线Fig.4 Convergence curves of each algorithm in CEC2020(dim=100)
在10 维的CEC2020 测试函数中,对于单峰函数F1,ROA、SCA 和WSO 算法都有一定收敛能力,但与IROA 相比有所不足,IROA 与WSO 算法在后期均能继续收敛。在多峰函数F2 与F3 中,IROA 虽然前期的收敛速度较慢,但在中后期都能跳出局部最优,快速收敛,其他算法均陷入了局部最优,无法收敛。在无峰函数F4 中,由于函数较为简单,除了WSO 算法与SCA,其他算法都能很快找到最优值。对于混合函数F5~F7,在F5 中IROA 前期就能快速收敛;在F6和F7 中IROA 前期收敛速度虽然慢,但后期依旧能跳出局部最优。对于复合函数F8~F10,IROA收敛能力依旧不俗,尤其在F9 中,IROA 展现出了强大的跳出局部最优的能力,与WSO 算法在前期就能快速收敛,而ROA和其他算法均陷入了局部最优。
在100维的CEC2020测试函数中,对于单峰函数F1,可以明显看出IROA 的收敛能力最强,ROA 次之,其他算法收敛能力接近,中后期无法继续收敛。对于多峰函数F2 和F3,IROA 能持续跳出局部最优,拥有较高的收敛精度。在无峰函数F4 中,只有WSO算法与SCA 无法达到理论最优。对于混合函数F5~F7,明显看出IROA 的收敛能力更强,比在10 维度中得到优势更加明显。在复合函数F8~F10 中,IROA在F8 中可以不断收敛,而其他算法中期便陷入停滞状态,对于F9和F10,IROA、ROA和SCA可以持续收敛,但明显看出IROA的收敛速度和收敛精度更高。
3.4 Wilcoxon秩和检验
仅通过最优适应度值、平均适应度值、适应度值标准差和收敛曲线图无法分析算法每次运行的结果,因此本文采用Wilcoxon秩和检验来验证IROA 与对比算法的显著区别。其中显著水平为5%,当p小于5%时,则表示存在显著区别,反之则较为相近。本文将8 个算法在CEC2020 中运行30 次,统计结果如表5 和表6 所示,其中符号“+”“-”“=”分别表示IROA 性能优于、劣于和等于对比算法,对p大于5%的数据进行了加粗处理。在F4 中存在较多为1 的情况,这是由于F4的函数较为简单,大多算法都能很快找到理论最优解,在不同维度的大部分函数中p的值均小于5%,可以证明IROA 与对比算法存在显著差异,且优于对比算法。通过Wilcoxon 秩和检验,可以看出IROA在大多数测试函数中都有更优的效果。

表5 各算法的Wilcoxon秩和检验结果(dim=10)Table 5 Wilcoxon rank-sum test results of each algorithm(dim=10)

表6 各算法的Wilcoxon秩和检验结果(dim=100)Table 6 Wilcoxon rank-sum test results of each algorithm(dim=100)
3.5 对比其他反向学习策略
为了进一步验证联合反向学习策略的优越性,表7给出了将IROA中的联合反向学习替换成其他反向学习策略在CEC2020(dim=10)运行30 次的统计数据,对较好的数据进行了加粗处理。其中ROBL(random opposition-based learning)为随机反向学习[14],QOBL(quasi opposition-based learning)为准反向学习[23],QRBL(quasi reflection-based learning)为准反射学习[24],OBL(opposition-based learning)为反向学习[28]、LOBL(lens opposition-based learning)为透镜反向学习[18]。不难看出,采用联合反向学习策略的IROA 在大多数函数下的效果都很理想,虽然F6 中的适应度值标准差弱于准反射学习策略,但平均适应度值依旧优于其他反向学习策略。在F8 与F9 中平均适应度值没有取得最优效果,但与其他策略并无较大差距。
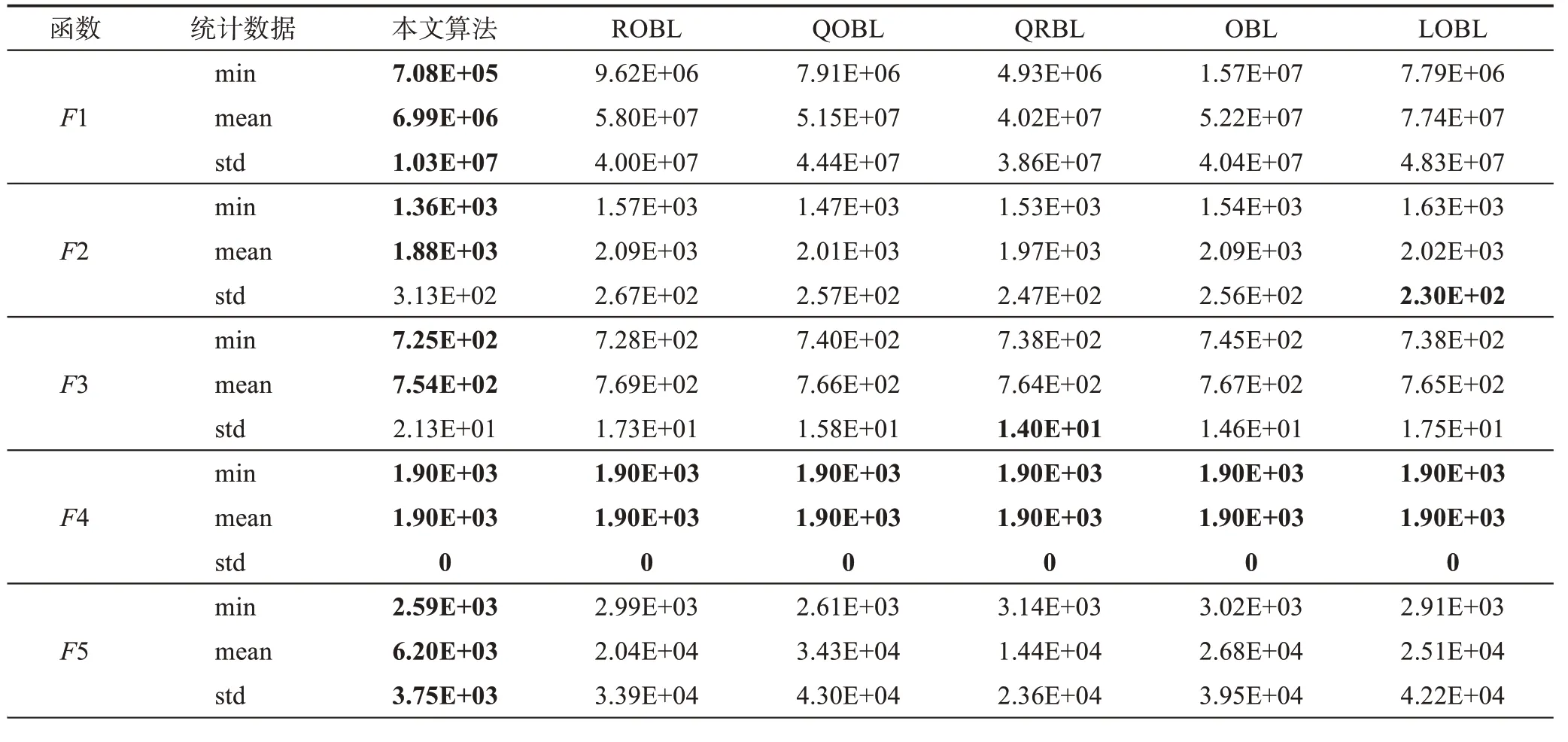
表7 与其他种类反向学习的对比结果Table 7 Comparison results with other kinds of opposition-based learning
3.6 对比其他ROA的变体
现已有许多学者对ROA 进行了改进,为了体现提出的IROA 的优势,本文选取了融合布朗运动与透镜反向学习策略的MROA(modified remora optimization algorithm)[18]、基于Levy 飞行与重启策略的EROA(enhanced remora optimization algorithm)[29]、融合自主觅食机制的IROA(Zheng)[19]和融合互利共生策略的IROA(Wang)[30]与本文的IROA 进行对比,并通过10 维的CEC2020 函数进行测试,其具体结果如表8 所示,同时对最优的数据进行加粗。从表8 可以看出,函数F1、F2 和F3 中,IROA(Wang)的结果略优于本文算法,但与本文算法的结果差距不大。在混合函数F5~F7 中,本文算法得到的最优适应度值、平均适应度值和适应度值标准差都有一定优势,虽然F6 的结果略差于IROA(Wang),但本文算法得到结果依旧不俗。在复合函数F8~F10 中,F8 中,本文算法得到结果与IROA(Wang)相近,F9 中本文算法得到了最好的最优适应度值,平均适应度值次之,F10 中本文算法得到结果明显优于其他ROA 的变体。
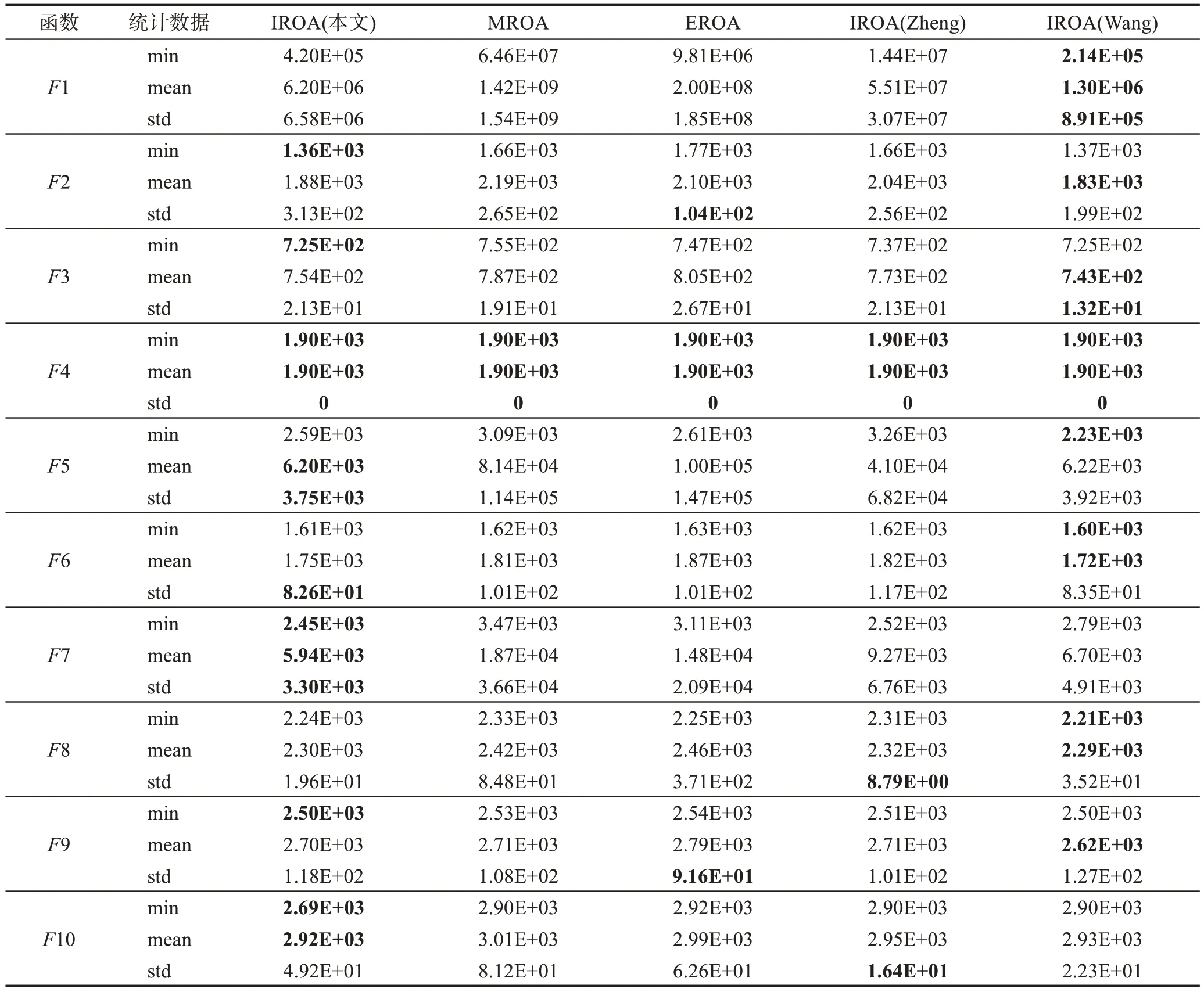
表8 与其他ROA变体的对比结果Table 8 Comparison results with other ROA variants
3.7 单一策略对比实验
IROA采用了两种策略对ROA进行改进,为了体现两种策略对ROA 的优化作用,本节给出了仅加入联合反向策略的ROAJOS(remora optimization algorithm with joint opposite selection)和仅加入宿主切换机制的ROAHS(remora optimization algorithm with host switching)与基础ROA 进行对比,在10 维度的CEC2020 测试函数中运行30 次,表9 给出了统计结果。为了使统计结果更明显,本文对表中较差的数据进行加粗。不难看出,基础ROA 的大多数数据都被加粗。联合反向学习与宿主切换机制对ROA均有一定作用。

表9 单一策略对比结果Table 9 Comparison results of single strategy
3.8 参数敏感分析
本节进一步分析了宿主切换机制中选择白鲸作为宿主的概率,给出了概率分别为0.1、0.2、0.3、0.4、0.5、0.6、0.7、0.8和0.9的敏感度分析。表10为不同值的Pr在CEC2020 测试函数中的统计结果。从表10中可以看出,在概率为0.5 时,IROA 在函数F5、F7、F8、F9 和F10 中得到了较好的均值,在其他函数中得到的结果依旧不俗。不难看出,当概率为0.5 时,IROA能够取得更好的结果。
4 IROA的工程问题应用
研究优化算法的目的之一是为了解决实际问题,而测试函数中的结果并不能体现IROA 在工程问题中的实际性能。因此,本文利用汽车碰撞优化问题对算法进行测试,进一步验证IROA 的工程适用性。
汽车防碰撞设计问题是为了在保持汽车性能的同时,尽可能降低汽车的质量。该问题包含11 个决策变量与10 个约束条件。其中B 柱内板的厚度x1、B柱钢筋厚度x2、地板内侧的厚度x3、横梁厚度x4、门梁厚度x5、门带线钢筋厚度x6、车顶纵梁厚度x7、B 柱内侧材料x8、地板内侧材料x9、护栏高度x10和碰撞位置x11为决策变量。汽车碰撞优化问题设计示意图如图5所示。

图5 汽车侧面碰撞模型图Fig.5 Model diagram of car side crash
汽车防碰撞设计问题的数学模型如下:
目标函数:
约束条件:
变量范围:
表11 为IROA 和对比算法在汽车防碰撞设计问题上的运行30 次的实验结果和单次运行的平均时间。实验选取了标准ROA、四种ROA 的变体、一种沙猫优化算法的变体和一种互利共生算法的变体作为对比,它们分别为ROA、MROA、IROA(Zheng)、EROA、IROA(Wang)、改进的沙猫算法(modified sand cat swarm optimization,MSCSO)[31]和改进的互利共生算法(hybrid particle swarm optimization/genetic algorithm/symbiotic organisms search,HGPSOS)[32]。其中种群规模N=30,维度大小dim=7,迭代次数T=500。Best为各算法在汽车防碰撞问题上运行30次得到的最小适应度值,Mean 为平均适应度值,Std为适应度值标准差,time 表示单次运行时间,最优的Best、Mean 和Std 值进行了加粗,x1~x11为算法取得最小适应度值时的解 。不难看出,当x=[0.500 000 000,1.226 934 200,0.500 000 000,1.205 565 700,0.500 000 000,1.223 710 100,0.500 000 000,0.345 000 000,0.345 000 000,0.214 107 800,0.007 404 300]时,IROA 取得了最小质量,并且IROA 得到的平均适应度值与适应度值标准差也优于对比算法。从单次运行时间中看出,IROA的运行时间虽然高于ROA,但EROA、IROA(Wang)、MSCSO 和HGPSOS 算法的运行时间明显更高。实验充分证明了IROA在汽车碰撞问题上的有效性。
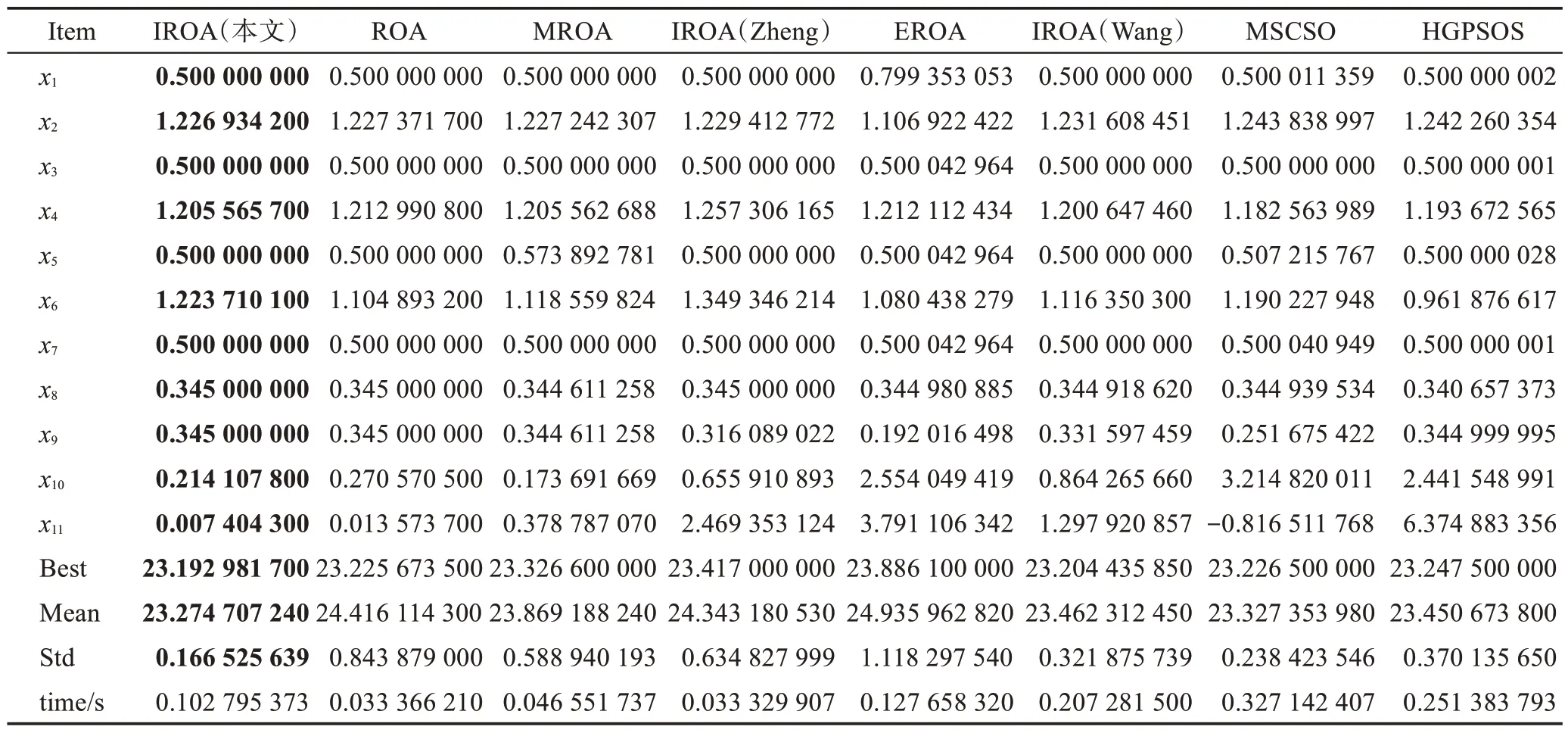
表11 各算法在汽车防碰撞设计问题的实验结果Table 11 Experimental results of each algorithm in car crashworthiness design
通过上述工程问题证明,原始ROA 的探索能力有所不足且易陷入局部最优。而IROA 通过加入联合反向策略并增加宿主切换机制,增强了算法的全局能力并提高了算法的收敛精度,在实际工程问题中也能找到更优的解,充分验证了IROA 在解决复杂的工程问题中有较高的潜力与实用价值。
5 结束语
针对ROA 的探索能力不足、求解精度较低并易陷入局部最优的缺点,IROA 加入了一种联合反向学习策略,增强了算法的全局能力;并增加宿主切换机制,弥补了鱼寄生在旗鱼上探索能力不足的缺点。利用CEC2020测试函数对IROA进行测试,实验结果表明IROA 在大多数函数中都有不错的效果。同时,通过对汽车防碰撞问题的求解,进一步验证了IROA在实际问题中的适用性。在未来的工作中,计划将改进的鱼优化算法应用到更多实际问题中,如多阈值图像分割领域,并进一步提高和提升算法的优化性能。
猜你喜欢
科学(2020年3期)2020-11-26
当代水产(2020年3期)2020-06-15
作文小学中年级(2020年4期)2020-06-11
小哥白尼(野生动物)(2019年8期)2019-11-16
中国惯性技术学报(2019年6期)2019-03-04
小学生时代(2018年10期)2018-11-19
中央民族大学学报(自然科学版)(2017年2期)2017-06-11
百科探秘·航空航天(2016年3期)2016-11-07
火控雷达技术(2016年3期)2016-02-06
实用皮肤病学杂志(2015年4期)2015-12-22