
基于有限元法对棉花在线打包系统的轻量化仿真及优化
2023-12-06 05:59孙威,姚庆
林业机械与木工设备 2023年10期
孙 威, 姚 庆
(南通大学机械工程学院,江苏 南通 226019)
棉花加工的最后且至关重要的一道工序是棉花打包[1,2],打包的任务是:将皮棉、棉短绒及加工回收的棉纤维打成标准包以方便储存运输。如果没有包装,将无法流入市场,可见整个棉花加工生产过程中,棉花的打包是直接面向市场的一个关键步骤[3]。
当今,美国和德国的棉花打包技术较为先进成熟[4]。其中,美国的大陆鹰棉机公司、拉姆斯棉机公司以及德国的科赫机械制造有限公司[5]在棉花打包行业中处于领先地位,代表着世界棉机行业最先进的技术。在20世纪80年代,大陆鹰棉机公司首次研制出了液压打包机,而到了21世纪初,大陆鹰棉机公司的棉花打包机就已经达到了20~30包/ h的包装效率[6],之后又进一步研究了液压棉花捆扎机的框架优化[7],并致力于减少棉包包装力[8]。进入21世纪后,大陆鹰公司的液压打包机继续保持着其在打包机领域的领先地位,极大地推动着美国棉纺织业的发展[9,10]。
集成化与自动化控制是我国棉花打包行业的发展趋势。随着时代的发展与科技的进步,各大厂商对生产效率的追求也在不断提高。在棉花打包加工业中,单机皮棉台时产量为1 600~2 000 kg,而最初的时产量仅为400~500 kg,提高后的效率足足是原来的4倍[11,12],而棉花打包作为轧花工艺的最后一道工序显得尤为重要,其效率的高低将在一定程度上决定整套轧花生产设备的最终效率。目前美国棉花打包机的打包效率可达40~60包/h,比我国高1~2倍,而且自动化程度高,能够实现自动捆包、自动计量、自动装包,且故障率低、适应性强[13],这同时也反映了我国的棉花打包机还有较大的提升空间,所以我们应当找出弱项,补足短板,进一步提升产品的效率与稳定性,努力攻克技术难点,使我国的棉花打包行业在世界竞争中立足。
本文所研究的棉花打包机线上改进,目的是为将棉花打包成“包裹包”的过程实现自动化,以减少人力成本及操作风险。棉包包装方式有两种:捆扎带在内,包装在外的“裸包”;捆扎带在外,包装在内的“包裹包”;目前,棉花打包成“裸包”的过程已基本实现自动化,但是裸包坏包率较高,且安全性较低,易发生棉包捆扎带接头断裂、棉包崩包的情况,给棉花加工厂带来经济损失,而棉包打包成“包裹包”的过程自动化并不成熟[14],打包机打包裹包与裸包相比,增加了人工在打包机主压压头及下方放置包装棉布的过程,增加了打包机主压缩机构二次上下行的过程[15],且多采用人工完成包裹包工作,劳动效率较低,且速度缓慢[16],虽然经过几十年的发展,近期产品的质量较早期有所提高[17],但我国所需的棉花打包机大多仍依赖进口[18],故需要实现自动化打包裹包的棉花打包机的改进。
1 理论计算
根据中华人民共和国国家标准GB6975—2013[19]《棉花包装(cotton baling)》所得:

表1 棉包外形基本尺寸、重量及允许偏差(GB6975—2013)
1.1 棉花压缩力计算
按照前苏联根据实验数据推导的棉花压缩力公式[20],棉花打包机对棉花压缩打包时,正压面的压强P (kg/cm2):

(1)
其中A为与棉花含水率(回潮率)相关系数[21,22](一般情况下棉花含水率为6%,此时A=178.95);ρ压缩为压缩后打包所用棉花的密度(kg/m3)。

(2)
其中G为棉花的重量,kg;H为对棉花的压缩高度,即打包机主压压板下平面至棉箱底的距离,m;L为棉箱内横截面的长度,m;W:棉箱内横截面的宽度,m。
(3)
其中S为棉箱内横截面的面积(cm2)。F为打包机主压机构对棉花施加的压缩力,kg。
由于G、L、W、S按《棉花包装(cotton baling)》要求,为固定值,当棉花的含水率稳定时,打包过程中主压机构对棉花的压缩力由压缩高度确定。以国内典型的MDY-400型棉花打包机为例(L=1.36 m,W=0.5 m,棉箱高度=2.65 m,最终压缩高度=0.5 m,棉包重量G定为230 kg,压缩力与压缩高度关系曲线如图1所示。

图1 打包压缩力与压缩高度的关系曲线

图1 自动捆扎的打包机(美)
(1)采用棉包Ⅰ型时,L=1400,W=530,H=700,其压缩力计算如下:


对棉花压缩力F=P×S=14.57×136×50=990.76 kN
(2)采用棉包Ⅱ型时,L=800,W=400,H=600,其压缩力计算如下:


对棉花压缩力F=P×S=15.1×136×50=1 026.8 kN
1.2 最大捆扎力计算
(1)采用棉包Ⅰ型,棉花含水率W=6,棉包重量G=227 kg,H=0.7 m,其最大捆扎力计算如下:
Fmax=0.2224G2.41H3.94/W0.41+237.53 N=0.2224(227)2.41(0.7)3.94/60.41+237.53 N=12705 N
(2)采用棉包Ⅱ型,棉花含水率W=6,棉包重量G=85 kg,H=0.6 m,其最大捆扎力计算如下:
Fmax=0.2224G2.41H3.94/W0.41+237.53 N=0.2224(85)2.41(0.6)3.94/60.41+237.53 N=8741.9 N
2 打包系统设计
2.1 棉花在线打包生产过程
棉花在线打包生产过程由送棉、夹取布袋、安装布袋、压缩棉花、打包棉包、出库[23]五部分组成,具体步骤如下:
(1)两个机械爪各移动到取布区并下行靠近布袋;
(2)机械爪气缸推杆推出,联动机械爪张开且吸取机构贴向布袋两侧;
(3)气泵工作,吸取机构吸住布袋两侧;
(4)气缸推杆退回,吸取机构将布袋两侧提起,并联动机械爪夹住布袋;
(5)两机械爪同时移动,将布袋安装到压头;
(6)压头夹工作,将布袋四侧夹住;
(7)两个机械爪重新移动到取布区并下行靠近布袋;
(8)机械爪气缸推杆推出,机械爪张开且吸取机构贴向布袋两侧;
(9)气泵工作,吸取机构吸住布袋两侧,随后气缸退回使机械爪抓住布袋(8、9抓取布袋同2~4);
(10)两机械爪同时移动,并将布袋安装到底座;
(11)送棉:
①物料(棉纤维)经滑棉道流入喂棉装置内,送棉油缸(前端安装推棉板)将物料推入前端,预压油缸下端的踩板将物料压入棉箱;预压下行到位后,送棉油缸后退;送棉油缸后退到位后,预压油缸后退(向上),完成一次预压送棉循环,预压送棉来回循环动作;
②预压送棉多次循环将物料压入棉箱,棉箱内的棉纤维的重量达到217~237 kg,用于重量计量的压力继电器发讯;预压送棉停止动作,打包机开始提箱,转箱;转箱过后,空箱转到预压一侧,继续进行预压送棉循环,同时有物料棉箱转到主压一侧;
③主压机构(主压油缸带动压头)下行压缩物料,速度由快变慢,将物料压缩至高度490~500 mm时停止;
(12)棉箱下降,压缩物料,棉箱升起,压缩棉出现;
(13)压头夹沿着导轨下行,使得棉布包裹在压缩棉上;
(14)机械爪各抓住底座布袋两侧上移,使下方布袋套上物料;
(15)机械爪收回,捆扎机捆扎布袋;
(16)出包机构倾斜,将棉包倾倒在传送带上;
(17)接包小车接收并运送至仓库。
2.2 棉花打包系统工作流程图
棉箱两侧分别装有一个可吸抓取的气动机械爪,该机械爪可360°旋转,并能够上下移动,随后在主压压头四侧装有导轨夹,能够夹取棉布并向下移动,打包机运行步骤如图2所示:
2.3 棉花打包系统装配图
棉箱两侧分别装有一个可吸抓取的气动机械爪,该机械爪可360°旋转,并能够上下移动,安装棉布时,气缸推杆下行,气动爪张开,而吸取机构随连接基体下行,达到“气动爪张开,吸取机构伸出”的效果;气缸推杆上行,气动爪闭合,而吸取机构随连接基体上升,达到“吸取机构回缩,气动爪抓取”的效果,使得打包系统中的“安装棉布”过程实现自动化。在主压压头四侧装有导轨夹,能够夹取棉布并向下移动,用以解决“包裹棉包”无法自动化的难点。棉花打包机的装配如图3所示:

图3 打包系统装配图1.压头夹;2.气动机械爪;3.传送带;4.棉箱;5.主压压头;6.底座
3 有限元分析
3.1 仿真准备与材料属性
气动机械爪由吸取机构与机械爪两部分组成,通过Solidworks软件搭建了吸取机构(图4)、机械爪(图5)。由于需要处理的细节较多,故建模过程中对于某些结构特征如倒角、焊缝等未加以细化。这样的处理易于结构模型的生成,也可以提高计算效率。采用结构钢搭建的气动机械爪材料属性,具体定义见表2。

表2 材料属性
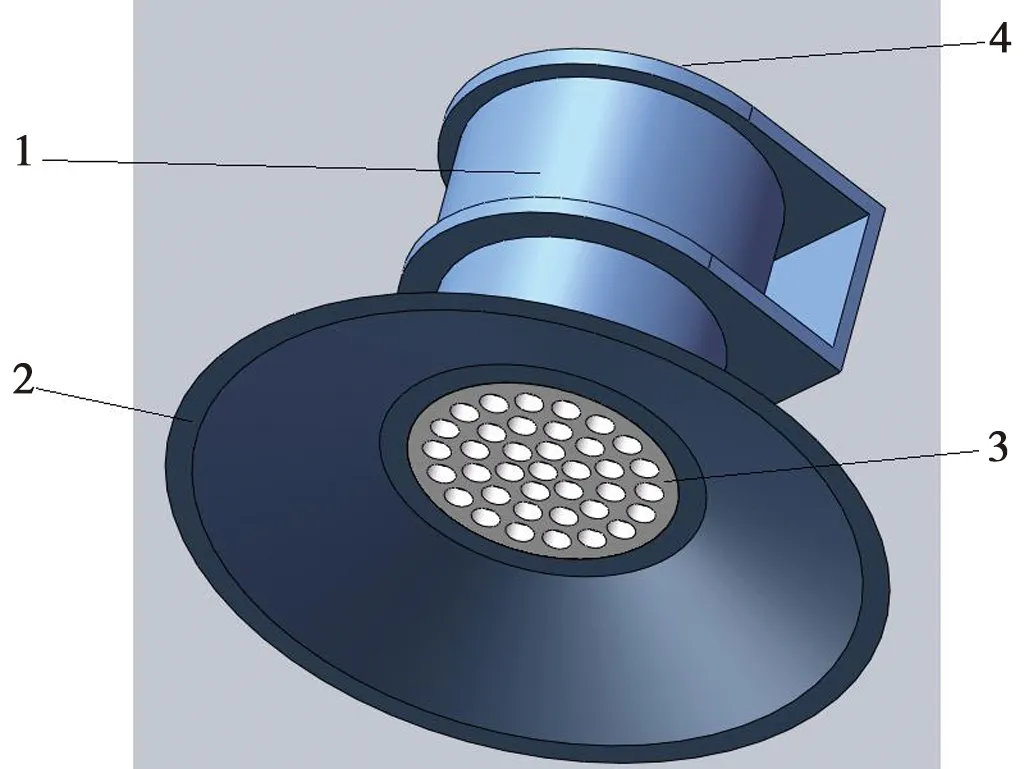
图4 吸取机构三维图1.导气通道;2.吸盘;3.导气板;4.微型气泵

图5 机械爪三维图1.机座;2.连接立柱;3.连接块;4.固定连接基体;5.气爪长连杆;6.短连杆; 7.机爪;8.简化气缸;9.气缸推杆;10.连接基体
3.2 载荷约束与网格划分
将材料定义为结构钢,接着划分网格,过渡设置为“快速”,跨度角为“大尺度”;
气动爪受力情况,受力为各爪面200 N,几何结构2面,采用Press面压力,定义依据为“法线”,应用“表面效应”,气动爪受力情况如图6所示。

图6 气动机械爪载荷示意图
3.3 结果分析
3.3.1 气动机械爪的总变形分析
气动爪总变形分析,最大变形处为爪根,所受应力为6.285 2 Pa,总变形分析结果如图7所示,结构钢材料的压缩屈服强度与拉伸屈服强度均为250 MPa,其拉伸极限强度为460 MPa,符合所需使用要求。

图7 总变形分析图
3.3.2 气动机械爪的最大主应力分析
最大主应力分析,所受最大主应力为30 229 Pa,最大主应力分析结果如图8所示,结构钢材料的压缩屈服强度与拉伸屈服强度均为250 MPa,其拉伸极限强度为460 MPa,符合所需使用要求。

图8 最大主应力分析图
3.3.3 气动机械爪的等效应力分析
等效应力分析,最大等效应力为32 023 Pa,等效应力分析所得结果如图9所示,结构钢材料的压缩屈服强度与拉伸屈服强度均为250 MPa,其拉伸极限强度为460 MPa,符合所需使用要求。

图9 等效应力分析图
4 结论
本论文开展了以自动化打包裹包为目的的线上棉花打包系统为课题的研究内容,围绕棉花打包领域中棉花打包机的线上改进展开,延展到改进过程中必不可缺的棉花打包机的三维实体造型,以及基于有限元法对棉花在线打包系统中气动机械爪的结构受力分析,并根据简化原则采取合理化设计。主要的工作包括:
(1)归纳总结了目前棉花打包机的缺点及不足:①传统的棉花打包机打包精度不高,速度缓慢,这种人工打包的方式劳动效率低下;②目前,棉花打包成裸包的过程已基本实现自动化,但是裸包坏包率较高,且安全性较低,易发生棉包捆扎带接头断裂、棉包崩包的情况,给棉花加工厂带来经济损失;
(2)进行了棉花打包机线上改进的设计,由送棉、夹取布袋、安装布袋、压缩棉花、打包棉包、出库五部分组成;
(3)建立了棉花打包机线上改进部分的三维实体模型,并进行了合理的简化操作;
(4)对设计的棉花打包机重要结构进行了Ansys静态力分析:对棉包在线打包系统气动机械爪进行了有限元仿真,发现其结构受力稳定,由Ansys静态力分析可得,气动机械爪最大变形处所受应力为6.285 2 Pa,所受最大主应力为30 329 Pa,最大等效应力32 023 Pa,结构钢材料的压缩屈服强度与拉伸屈服强度均为250 MPa,其拉伸极限强度为460 MPa,符合所需使用要求,且机械爪材料应力余量较大,可进行轻量化。
本文通过有限元法对此类产品结构优化与缩短研发周期有重要借鉴意义,可为农业棉花打包机械的轻量化与自动化改进提供思路。
猜你喜欢
医疗装备(2023年15期)2023-08-23
中国棉花加工(2023年5期)2023-05-11
宝藏(2022年10期)2022-03-06
中国棉花加工(2021年1期)2021-05-17
纺织检测与标准(2020年4期)2020-08-30
科教新报(2020年21期)2020-06-05
中国棉花加工(2018年1期)2018-04-24
中国棉花加工(2018年6期)2018-04-10
民俗研究(2017年2期)2017-03-22
农机化研究(2016年10期)2016-03-23
