约束支链或无约束支链对并联机构运动学与刚度性能的影响
2023-12-02 07:39:49沈惠平李霞李菊李涛孟庆梅吴广磊
中国机械工程 2023年13期
沈惠平 李霞 李菊 李涛 孟庆梅 吴广磊

摘要:
设计了两个零耦合度且部分运动解耦的两支链新型三平移并联机构,它们含有的相同支链Ⅰ为混合支链,而支链Ⅱ分别为约束支链和无约束支链。分析了两个机构的主要拓扑特性,并给出其拓扑解析式;对两个机构的位置正反解、奇异性、动平台的速度与加速度以及工作空间依次求解;进行了刚度计算与分析。最后,比较分析两个机构的运动学与刚度性能,结果表明含约束支链的机构1具有工作空间较大、刚度性能好等优势,为优选机型;给出了机构1用于工件物料在货车与堆场或仓库之间的分拣及转送应用场景的概念设计。
关键词:并联机构;拓扑设计;运动学;工作空间;奇异性;刚度
中图分类号:TH112
DOI:10.3969/j.issn.1004-132X.2023.13.003
Effect of Constrained or Unconstrained Branches on Kinematics and Stiffness Performance of PMs
—Design,Analysis and Optimization of Two Novel Three-translation PMs with Partial Motion Decoupling Being Examples
SHEN Huiping1 LI Xia1 LI Ju1 LI Tao1 MENG Qingmei1 WU Guanglei2
1.Research Center of Advanced Mechanism,Changzhou University,Changzhou,Jiangsu,213016
2.School of Mechanical Engineering,Dalian University of Technology,Dalian,Liaoning,116024
Abstract: Two novel three-translation PMs of two branch chains with zero coupling-degree and partial motion decoupling were designed. They contained the same branch Ⅰ as a mixed branch, while branch Ⅱ was a constrained branch or an unconstrained branch respectively. Firstly, the main topological characteristics of the two mechanisms were analyzed, and their topological analytical expressions were given. Secondly, the forward and inverse position solutions, singularity, velocity and acceleration of the moving platforms, and workspaces of the two mechanisms were solved in turn. Then, the stiffness was calculated and analyzed. Finally, the comparative analyses of the kinematics and stiffness performance of the two PMs show that the PM 1 with the constraint branch chain has the advantages of large working space and good stiffness performance, which is the preferred PM. Meanwhile, the conceptual design of the application scenario of the PM 1 for the transmission, sorting and transfer of workpiece materials between trucks and yards or warehouses was given.
Key words: parallel mechanism(PM); topology design; kinematics; workspace; singularity; stiffness
收稿日期:2022-09-27
基金項目:
国家自然科学基金(51975062)
0 引言
三自由度(DOF)的三平移(3T)并联机构具有驱动件少、结构简单、控制不复杂、动态性能好、制造成本较低等优点,具有良好的工程应用前景。
较多学者研究了Delta机构[1]及其衍生操作手[2-4]的运动学、动力学问题。PRAUSE等[5]采用不同的评价标准(工作空间、最大驱动力和速度、功率、驱动器刚度、精度和传动性能)对三平移对称并联机构进行了比较分析。杨廷力等[6]基于单开链单元综合出多种3T新机型,并对它们进行了分类。TSAI等[7]研究了3-UPU并联机构的运动分析和优化。ZHU等[8]提出了一种新的三平移空间柔性机构及其拓扑优化设计方法。DI GREGORIO[9]讨论了一种特殊的3-URU型平移并联机构的正向位置分析。KONG[10]提出了一种基于约束奇异轨迹的3-UPU平移并联机构的系统分类方法。MACHO等[11]提出了一种新的无浮动移动关节、无冗余约束的三平移并联机构,其工作空间内完全没有奇点。PAN等[12]提出了一种三平移运动的柔性并联机构,能在较大的工作空间中以足够的位姿精度实现预期的空间平移。MENG等[13-14]提出了一种改进的Delta-CU并联机构,并进行了灵敏度分析和运动学标定。XIE等[15]研究了一种缆索驱动三自由度平移机构的定向保证方法。
上述大部分三平移并联机构存在两点不足:①机构不具有符号式位置正解,仅有数值解,加大了工作空間分析、误差校正、尺寸综合、运动控制和动力学研究的难度;②不具有输入-输出运动解耦性,因此,不利于正向位置求解、运动控制和轨迹规划。因此,具有符号式位置正解和运动解耦的新型3T并联机构一直引起人们的关注。
文献[16-18]设计了多种具有运动解耦及符号式位置正解的3T机构,并分析了其主要拓扑特征,但对这些机构的工作空间分析仍采用基于位置反解的离散化方法,计算量偏大,同时,对设计机构的应用场景没有较好的阐述。
并联机构的刚度分析方法主要有有限元法(FEA)[19-20]、矩阵结构法(MSA)[21]和虚拟关节法(VJM)[22-23]。虚拟弹簧法[24-25]结合虚拟关节法与矩阵结构法,不考虑预载荷,在杆件末端增加虚拟弹簧来描述杆件的弹性变形,其刚度系数用弹簧的弹性系数来表示。
本文提出两个零耦合度(k=0)且部分运动解耦的两支链新型三平移(3T)并联机构,给出这两种机构的4个主要拓扑特性,并对其运动学和刚度进行分析与比较后得到优选机型。
1 机构设计与拓扑分析
1.1 机构设计
1.1.1 设计的基本思路
已有研究表明:①两支链并联机构具有结构简单、动平台转动能力强、干涉少等优点[26];②含有混合支链的并联机构一般具有耦合度低(k=0,1)、输入-输出(部分)运动解耦,且易得到符号式位置正解等优点,且其运动学、刚度以及动力学综合性能也较好[27];同时,含1-DOF、2-DOF混合支链数目越多,机构的输入-输出(部分)运动解耦性能越好,其运动学/动力学求解也越容易,这是因为(1~2)-DOF混合支链本身的位姿易求得。
考虑上述两方面因素,本文将设计两个两支链的、零耦合度且部分运动解耦的新型三平移(3T)并联机构,显然,两条支链末端构件的输出运动都包含三平移元素,其中,支链Ⅰ均为两滑块两平移平面机构的输出杆上串联一个运动平面相垂直的平行四边形机构构成的3-DOF混合支链;而支链Ⅱ不同,分别为一个4-DOF的(混合)约束支链和一个6-DOF的无约束支链,以对比分析含约束支链和无约束支链并联机构运动学和刚度性能的优劣。
1.1.2 支链设计
1.1.2.1 混合支链Ⅰ的设计
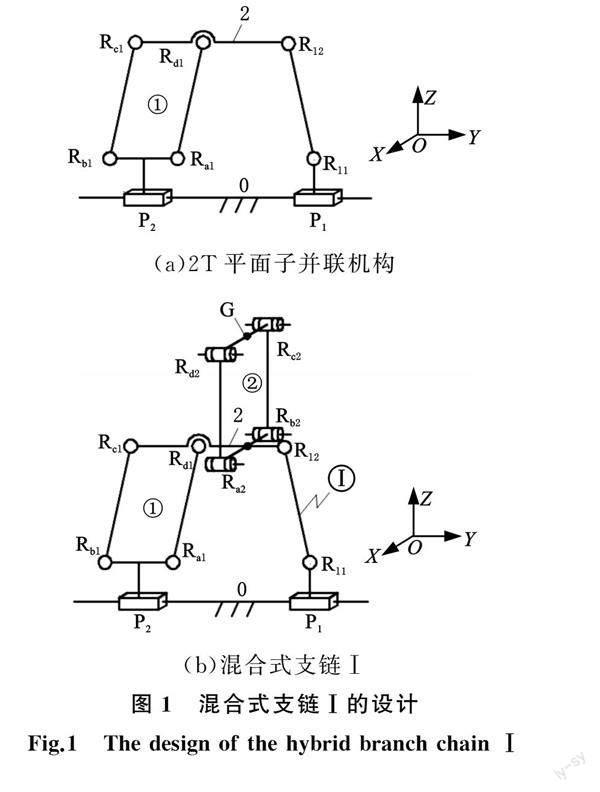
首先,设计一个两滑块两平移(2T)的平面子并联机构[27],它由一条包含由4个转动副(4R)组成的平行四边形机构①(记作Pa①)的分支链S2{-P2∥Pa①-}和另一条分支链S1{-P1⊥R11∥R12-}并联组成(“∥”表示平行,“⊥”表示垂直),两个移动副P1、P2在同一直线导轨上,如图1a所示。
为了阐述方便,在静平台0上建立静坐标系OXYZ,X轴垂直于P1、P2所在的直线导轨,Y轴平行于P1、P2所在的直线导轨,Z轴由右手螺旋定则确定。
进一步,在子并联机构输出构件2上串联一个平行于OXZ平面的4R平行四边形机构②(记作Pa②),于是,得到混合支链Ⅰ,如图1b所示。显然,混合支链Ⅰ的末端构件(G)的输出运动为三平移。
1.1.2.2 支链Ⅱ的设计
支链Ⅱ可为约束支链或无约束支链,但至少都应含有三平移输出的元素。
(1)约束支链Ⅱ的设计。
首先,位于另一侧平行直线导轨上的移动副P3通过转动副R31与第3个4R平行四边形机构(相当于一个移动副,记作Pa③)一短边连接,然后,在其另一对边短杆上串联一个转动副R32,且移动副P3的轴线方向平行于转动副R31、R32的轴线。此时,4-DOF的约束支链Ⅱ可记作{-P3∥R31∥Pa③∥R32-},如图2a所示。
(2)无约束支链Ⅱ的设计。
显然,这里的无约束支链可选用6-DOF的{-P3-S1-S2-}类型,如图2b所示。
1.1.3 机构的生成
此时,将混合支链Ⅰ与约束支链Ⅱ分别连接于动平台1的两端S、T,得到的机构1如图3a所示;或者将无约束支链Ⅱ的球副S2直接连接到混合支链Ⅰ上Pa①输出杆的延长杆1,得到的机构2如图3b所示,则动平台1均可实现三平移输出[28]。
对机构2而言,一旦无约束支链Ⅱ装配于动平台1的右端,则球副S1、S2只会分别产生绕平行于X轴的u′、u″轴的转动,以及绕平行于Y轴的v′、v″轴的转动,而不能分别产生平行于Z轴的绕w′、w″轴的转动。因此,绕w′、w″轴的转动为虚约束,而绕S1、S2连线的转动为局部DOF。这样,无约束支链Ⅱ去掉两个虚约束、一个局部DOF后,也剩下7-3=4个DOF。因此,当图3b所示的无约束支链Ⅱ中S1、S2连线的长度等于图3a所示的约束支链Ⅱ中Pa③长边的长度时,两者完全等效。
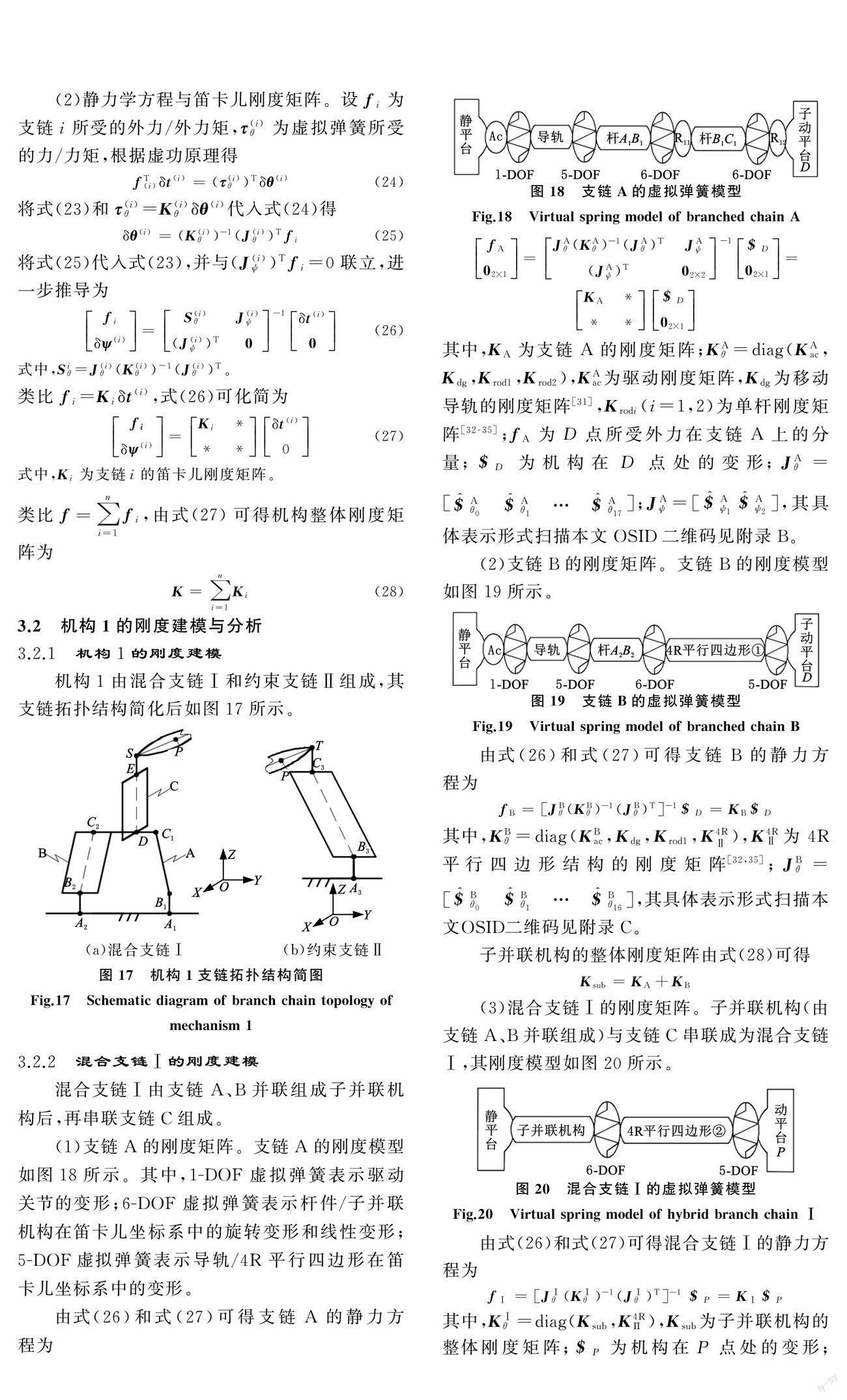
4 机构1、2的运动学、刚度性能比较
4.1 运动学性能(位置正反解、奇异性、速度及加速度)
机构1、2的运动学建模及其位置正反解、奇异性、速度及加速度的求解过程、难易程度、具体数值完全相同,两个机构均具有部分运动解耦性,即动平台沿Y轴的分量都仅由驱动副P1、P2决定。
4.2 工作空间的性质和大小
对比图13和图15,以及图14和图16,可得如下结论。
(1)工作空间的连续性、对称性:两种机构的工作空间均连续,且关于y=0处的OXZ面对称。
(2)工作空间的形状及其大小:
①机构1在OXY平面投影的右侧及在OYZ平面投影的上侧近似矩形,而机构2在OXY平面投影的右侧轮廓及在OYZ平面投影的上侧轮廓呈弧状。这是由于两个机构支链Ⅱ采用的机械结构不同,以及两个机构具有相同的支链Ⅰ,但机构2受到支链Ⅱ中运动副转角的限制远远大于机构1,因此,机构2在Y轴上的工作范围仅为机构1的60%。
②随着Z轴的工作范围的增大,机构1的OXZ平面投影变化趋势近似折线,而机构2的OXZ平面投影較为陡峭,趋势近似直线。
③机构2在X轴上的工作范围仅为机构1的7.178%,而在Z轴上的工作范围仅为机构1的1.386%,因此,机构1在X轴和Z轴上的工作范围明显大于机构2,这是由于机构1支链Ⅱ中平行四边形机构Pa③的转动副转角为15°~165°,大于机构2支链Ⅱ中球副转角的30°。
④在机构1、2内截取规则工作空间,分别如图14a、图16a黑色虚线框内的工作空间,它们在Y轴上的工作范围均为[-50 mm,50 mm],但机构2在OXY平面的规则空间仅为机构1的2.985%。
4.3 刚度性能比较
为了直观地比较机构1、2在各个方向上的刚度性能,选取工作空间中z=0.33 m 时的X-Y截面,同时分析两个机构的刚度矩阵中主对角线元素上元素的分布情况,对比结果如图28所示。
由图28可知,在z=0.33 m的截面内,机构1各方向扭转/线性刚度均好于机构2。这是由于两个机构支链Ⅰ相同,机构1支链Ⅱ中的4R平行四边形③比机构2支链Ⅱ中的定长杆B3C3具有更高的刚度,因此,机构1的刚度性能更好。
若取末端点P=(-0.005 m,0,0.33 m),机构1、2在其所在位置的扭转与线性刚度由MATLAB导出,如表4所示。由表4可知,含4R平行四边形机构形式的约束支链Ⅱ的机构1,其扭转刚度约增大20.7%、线性刚度约增大28.8%,总之,机构1的刚度大于机构2。
机构1、2的运动/刚度性能对比结果如表5所示。由表5可知,从位置正反解、奇异性、速度与加速度等方面来看,两个机构没有较大区别,但由于:①机构1相对机构2工作空间更大,且OXZ平面投影变化更平缓;②机构1的刚度更好
(这是因为机构1均由单自由度转动副或移动副组成,且约束支链Ⅱ采用了4R平行四边形机构);③机构1制造、加工、维修更简单,因此,可认为机构1为较优机型。
5 应用场景的概念设计
上述优选出的机构1可用于货车与堆场或仓库工件物料之间的传送与分拣,其工作原理(图29)如下:
传送带A以v0的速度传输工件物料,三平移并联机构1在传送带A的末端承接物件,3个驱动移动副(P1、P2、P3)均以相同的速度v1沿Y向的导轨行走;途经工业相机D,可以识别货物是否有瑕疵或损坏,再通过3-DOF吸盘机械手E将正常件分拣到传送带B上、将损坏件分拣到传送带C上;之后,传送带B、C分别以v2、v3的速度传输工件物料,使其进入库存或下一环节。在此过程中,动平台1的Y向位置由P1、P2决定,而X、Z向的位置由P1、P2、P3决定;导轨上的3个移动驱动副P1、P2、P3取不同的位置,可使动平台1的位置与传送带A、B、C的位置协调、对应一致。
工作平面示意图及空间布置如图29a~图29b所示,图29c所示为其应用场景的概念设计三维图。应用场景的具体工作过程运动仿真扫描
本文OSID二维码可见。
6 结论
(1)本文设计了两个零耦合度的新型两支链三平移并联机构,它们含有相同的混合支链Ⅰ,而支链Ⅱ分别为约束支链和无约束支链;同时分析了两个机构的方位特征(3T)、自由度(3)和耦合度(k=0),证明了这两个机构都具有部分运动解耦性,这使得其运动学建模与求解过程简便,有利于机构的运动控制和轨迹规划。
(2)对这两个机构进行了完整的运动性能计算与分析,即:①求解并验证了这两个机构相同的符号式位置正反解;②得到了这两个机构相同的3类奇异性发生的条件及其位置,两个机构具有相同的奇异位置易达性;③计算了这两个机构相同的动平台的速度与加速度曲线变化规律,表明运动平稳性较好;④分别计算分析了这两个机构的工作空间,表明机构1比机构2在X、Y、Z方向上的工作范围均较大。总之,这两个机构的位置正反解、奇异性及速度加速度变化规律相同或相似,但机构1工作空间更大,从而可实现的操作范围也更大。
(3)基于虚拟弹簧法得到并分析了两个机构在工作空间中的扭转/线性刚度分布,表明:①两个机构的整体线性刚度远大于其扭转刚度,且Z方向的线性刚度要好于其余两个方向;②在同一高度截面,机构1的刚度性能更好。
(4)与著名的三平移Delta并联机构(21个低副)相比,优选机构1具有较少的低运动副(19个),从而使制造、装配更容易;当3个移动副(P1、P2、P3)取同向同速时,整个机构可实现长距离的移动;当取不同值时,可实现物料的精确分拣。因此,它可用于工件物料在货车与堆场或仓库之间的长距离的传输、分拣。
本文工作对揭示约束支链或无约束支链对并联机构运动学与刚度性能的影响具有较高的参考价值。
参考文献:
[1] CLAVEL R. A Fast Robot with Parallel Geometry[C]∥Proceedings of the 18th Int. Symposium on Industrial Robots. Lausanne, 1988:91-100.
[2] STOCK M, MILLER K. Optimal Kinematic Design of Spatial Parallel Manipulators:Application to Linear Delta Robot[J]. Journal of Mechanical Design, 2003, 125(2):292-301.
[3] BOURI M, CLAVEL R. The Linear Delta:Development and Application[C]∥The 41st International Symposium on Robotics. Frankfurt:VDE, 2010:1198-1205.
[4] KELAIAIA R, COMPANY O, ZAATRI A. Multiobjective Optimization of a Linear Delta Parallel Robot[J]. Mechanism and Machine Theory, 2012, 50:159-178.
[5] PRAUSE I, CHARAF EDDINE S, CORVES B. Comparison of Parallel Kinematic Machines with Three Translational Degrees of Freedom and Linear Actuation[J]. Chinese Journal of Mechanical Engineering, 2015, 28(4):841-850.
[6] 杨廷力, 刘安心, 罗玉峰, 等. 机器人机构拓扑结构设计[M]. 北京:科学出版社, 2012:29-174.
YANG Tingli, LIU Anxin, LUO Yufeng, et al. Theory and Application of Robot Mechanism Topology[M]. Beijing:Science Press, 2012:29-174.
[7] TSAI L W, JOSHI S. Kinematics and Optimization of a Spatial 3-UPU Parallel Manipulator[J]. Journal of Mechanical Design, 2000, 122(4):439-446.
[8] ZHU D, FENG Y, ZHAN W. Topology Optimization of Three-translational Degree-of-freedom Spatial Compliant Mechanism[J]. Advances in Mechanical Engineering, 2019, 11(2):1687814019828228.
[9] DI GREGORIO R. Direct Position Analysis of a Particular Translational 3-URU Manipulator[J]. Journal of Mechanisms and Robotics, 2021, 13(6):061007.
[10] KONG X. Classification of 3-DOF 3-UPU Translational Parallel Mechanisms Based on Constraint Singularity Loci Using Groebner Cover[J]. Journal of Mechanisms and Robotics, 2022, 14(4):041010.
[11] MACHO E, URZAR M, PETUYA V, et al. Designing a Translational Parallel Manipulator Based on the 3SS Kinematic Joint[J]. Journal of Mechanisms and Robotics, 2019, 11(5):051007.
[12] PAN H, CHEN G, KANG Y, et al. Design and Kinematic Analysis of a Flexible-link Parallel Mechanism with a Spatially Quasi-translational End Effector[J]. Journal of Mechanisms and Robotics, 2021, 13(1):011022.
[13] MENG Q, LI J, SHEN H, et al. Kinetostatic Design and Development of a Non-fully Symmetric Parallel Delta Robot with One Structural Simplified Kinematic Linkage[J]. Mechanics Based Design of Structures and Machines, 2023, 51(7):3717-3737.
[14] SHEN H, MENG Q, LI J, et al. Kinematic Sensitivity, Parameter Identification and Calibration of a Non-fully Symmetric Parallel Delta Robot[J]. Mechanism and Machine Theory, 2021, 161:104311.
[15] XIE G, ZHANG Z, SHAO Z, et al. Research on the Orientation Error of the Translational Cable-driven Parallel Robots[J]. Journal of Mechanisms and Robotics, 2022, 14(3):031003.
[16] 沈惠平, 吳成琦, 许可, 等. 一种零耦合度三平移并联机构的设计及运动[J]. 中国机械工程, 2019, 30(6):658-664.
SHEN Huiping, WU Chengqi, XU Ke, et al. Design and Kinematics of 3-translation Parallel Mechanisms with Zero Coupling Degree[J]. China Mechanical Engineering, 2019, 30(6):658-664.
[17] SHEN H, CHABLAT D, ZENG B, et al. A Translational Three-degrees-of-freedom Parallel Mechanism with Partial Motion Decoupling and Analytic Direct Kinematics[J]. Journal of Mechanisms and Robotics, 2020, 12(2):021112.
[18] 沈惠平, 吉昊, 许正骁, 等. 三平移机构设计与运动学符号解及性能评价[J]. 农业机械学报, 2020, 51(9):397-407.
SHEN Huiping, JI Hao, XU Zhengxiao, et al. Design, Kinematic Symbolic Solution and Performance Evaluation of New Three Translation Mechanism[J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(9):397-407.
[19] CHENG G, WANG S T, YANG D H, et al. Finite Element Method for Kinematic Analysis of Parallel Hip Joint Manipulator[J]. Journal of Mechanisms and Robotics, 2015, 7(4):041010.
[20] XU Y, YANG F, XU Z, et al. TriRhino:a Five-Degrees-of-freedom of Hybrid Serial-parallel Manipulator with All Rotating Axes Being Continuous:Stiffness Analysis and Experiments[J]. Journal of Mechanisms and Robotics, 2021, 13(2):025002.
[21] CAMMARATA A, CONDORELLI D, SINATRA R. An Algorithm to Study the Elastodynamics of Parallel Kinematic Machines with Lower Kinematic Pairs[J]. Journal of Mechanisms and Robotics, 2013, 5(1):011004.
[22] VERTECHY R, PARENTI-CASTELLI V. Static and Stiffness Analyses of a Class of Over-constrained Parallel Manipulators with Legs of Type US and UPS[C]∥ Proceedings of IEEE International Conference on Robotics and Automation(ICRA). Roma, 2007:561-567.
[23] MAJOU F, GOSSELIN C M, WENGER P, et al. Parametric Stiffness Analysis of the Orthoglide[J]. Mechanism and Machine Theory, 2007, 42:296-311.
[24] PASHKEVICH A, CHABLAT D, WENGER P. Stiffness Analysis of Overconstrained Parallel Manipulators[J]. Mechanism and Machine Theory, 2010, 44:966-982.
[25] ZHAO W, PASHKEVICH A, KLIMCHIK A, et al. Elastostatic Modeling of Multi-link Flexible Manipulator Based on Two-dimensional Dual-triangle Tensegrity Mechanism[J]. Journal of Mechanisms and Robotics, 2022, 14(2):021002.
[26] SHEN H, TANG Y, WU G, et al. Design and Analysis of a Class of Two-limb Non-parasitic 2T1R Parallel Mechanism with Decoupled Motion and Symbolic Forward Position Solution-influence of Optimal Arrangement of Limbs onto the Kinematics, Dynamics and Stiffness[J]. Mechanism and Machine Theory, 2022, 172:104815.
[27] 沈惠平. 機器人机构拓扑特征运动学[M]. 北京:高等教育出版社, 2021:46-201.
SHEN Huiping. Topological Characteristic-based Kinematics for Robotic Mechanisms[M]. Beijing:Higher Education Press, 2021:46-201.
[28] 沈惠平, 赵一楠, 朱小蓉. 一种耦合度为1但正向位置解析和运动解耦的三平移并联操作手:中国, 202010111991[P]. 2020-06-05.
SHEN Huiping, ZHAO Yinan, ZHU Xiaorong. A Three Translation Parallel Manipulator with 1 Degree of Coupling but with Forward Position Analysis and Motion Decoupling:CN, 202010111991[P]. 2020-06-05.
[29] 沈惠平, 王达, 李菊, 等. 1T2R并联机构拓扑降耦设计与运动性能分析[J]. 农业机械学报, 2021, 52(5):370-377.
SHEN Huiping, WANG Da, LI Ju, et al. Topological Coupling-reducing Design and Kinematic Performance Analysis for 1T2R Parallel Mechanism[J]. Transactions of the Chinese Society for Agricultural Machinery, 2021, 52(5):370-377.
[30] 沈惠平, 顧晓阳, 李菊, 等. 基于拓扑降耦的3T1R并联机构设计与运动学特性分析[J]. 农业机械学报, 2021, 52(8):406-415.
SHEN Huiping, GU Xiaoyang, LI Ju, et al. Topological Coupling-reducing Based Design of 3T1R Parallel Mechanism and Kinematics Performances Analysis[J]. Transactions of the Chinese Society for Agricultural Machinery, 2021, 52(8):406-415.
[31] WU G, BAI S, KEPLER J. Stiffness Characterization of a 3-PPR Planar Parallel Manipulator with Actuation Compliance[J]. Proceedings of the Institution of Mechanical Engineers, Part C:Journal of Mechanical Engineering Science, 2014, 229(12):2291-2302.
[32] WU G, BAI S, PREBEN H. On the Stiffness of Three/Four Degree-of-freedom Parallel Pick-and-Place Robots with Four Identical Limbs[C]∥2016 IEEE International Conference on Robotics and Automation(ICRA)Stockholm, 2016:861-866.
[33] 许正骁, 吴广磊, 沈惠平. 一种新型低耦合度3T1R非全对称并联机构的刚度性能分析[J]. 机械传动, 2019, 43(12):131-139.
XU Zhengxiao, WU Guanglei, SHEN Huiping. Stiffness Analysis of a New Low Coupling 3T1R Asymmetrical Parallel Mechaism[J]. Journal of Mechanical Transmission, 2019, 43(12):131-139.
[34] 沈惠平, 朱忠颀, 孟庆梅, 等. 零耦合度空间2T1R并联机构运动学与刚度建模分析[J]. 农业机械学报, 2020, 51(10):411-420.
SHEN Huiping, ZHU Zhongqi, MENG Qingmei, et al. Kinematics and Stiffness Modeling Analysis of Spatial 2T1R Parallel Mechanism with Zero Coupling Degree[J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(10):411-420.
[35] 孙驰宇, 沈惠平, 王一熙, 等. 零耦合度部分运动解耦三平移并联机构刚度建模与分析[J]. 农业机械学报, 2020, 51(6):385-395.
SUN Chiyu, SHEN Huiping, WANG Yixi, et al. Stiffness Analysis of Three-translation Parallel Mechanism with Zero Coupling Degree and Partial Motion Decoupling[J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(6):385-395.
[36] 陈谱, 沈惠平, 邓嘉鸣, 等. 一种低耦合度非完全对称2T1R并联机构的运动分析与刚度建模[J]. 常州大学学报(自然科学版), 2021, 33(2):52-61.
CHEN Pu, SHEN Huiping, DENG Jiaming, et al. Kinematic Analysis and Stiffness Modeling of a Low Coupling Asymmetric 2T1R Parallel Mechanis[J]. Journal of Changzhou University(Natural Science Edition), 2021, 33(2):52-61.
(编辑 王旻玥)
作者简介:
沈惠平,男,1965年生,教授、博士研究生导师。研究方向为并联机构、机器人机构学。发表论文300余篇。E-mail:shp65@126.com。
猜你喜欢
河北省科学院学报(2020年1期)2020-05-25 06:57:18
电子制作(2019年15期)2019-08-27 01:12:16
制造技术与机床(2018年11期)2018-11-23 01:07:50
中国科技博览(2016年17期)2016-08-26 23:20:01
科技视界(2016年15期)2016-06-30 00:37:58
中国科技博览(2016年14期)2016-04-25 10:33:58
中国科技博览(2016年4期)2016-04-25 07:52:01
海军航空大学学报(2015年1期)2015-11-11 17:18:37
科技视界(2015年25期)2015-09-01 16:31:59
科技视界(2015年25期)2015-09-01 15:54:11