
汽车稳态转向特性测试方法分析与对比
2023-11-28 11:42王先云王淑芬王金波李玉光
机械设计与制造 2023年11期
王先云,王淑芬,王金波,李玉光
(1.大连大学机械工程学院,辽宁 大连 116622;2.山东交通学院汽车工程学院,山东 济南 250357)
1 引言
稳态转向特性是汽车最基本的特性。稳态转向特性指标包括车辆的不足转向度、侧倾梯度、前后轴的侧向柔度、质心侧偏角梯度以及方向盘力矩等。
不足转向度决定了汽车的侧向稳定性[1-6]。过度转向的车,其横摆角速度对方向盘转角的增益(ωr/δ)随车速增加而增加,当到达某一车速时,ωr/δ为无穷大,汽车处于不稳定状态。不足转向的车,ωr/δ在某一车速时存在峰值,车速继续增大,此值下降,汽车处于稳定状态[7]。
对汽车的动态响应特性来说,不足转向的车趋于稳定,而过度转向的车只有在车速低于临界车速时趋于稳定。不足转向度由前后轴侧向柔度的差决定[8-9],其中后轴的侧向柔度主要影响车辆的响应,前轴的侧向柔度主要影响车辆的横摆阻尼。侧倾梯度对车辆影响表现在两个方面,首先,侧倾大的车侧翻风险大,其次,对独立悬架的车辆来说,车身侧倾会带动车轮外倾,减小了车辆能达到的极限侧向加速度。方向盘力矩大小体现了驾驶员操作汽车的轻便程度,力矩随侧向加速度的变化体现了驾驶员的手感或路感。
在理论上这些指标意义明确,但在实际使用中不同试验方法得到的指标是否有差异,不同数据处理方法得到的指标是否有差异,笔者未找到相关的研究成果,为此,这里通过试验的方法对这些问题进行了研究。
2 几种测试方法的基本原理
关于汽车稳态转向特性的测试,在ISO标准与中华人民共和国国标[10-11]中均规定了几种不同的测试方法,这些方法总体分为三类,分别是定半径法,定转角法以及定车速法,这几种方法,对于汽车侧倾梯度,方向盘力矩等指标的测量原理上没有区别,但是对不足转向度的处理,原理有所不同,下面对这几种测试方法测试车辆不足转向度的原理进行了推导。
2.1 定半径方法
定半径方法的原理,如图1所示。汽车以点O为圆心做定圆转动,点A、B分别为前后轴中心点,AE为前轮指向,点F为汽车纵向轴线BA延长线上一点,AD为前轴上点A的速度方向,BC为后轴上点B的速度方向,试验过程中逐渐增加车速,同时保持车辆行驶半径不变。既然半径不变,车辆的轴距也是固定值,则在试验过程中∠AOB不变,将向量BC平移到AG,∠AOB不变则∠DAG不变。即随车速增加,δ-αf+αr保持不变(δ为前轮转向角,αf、αr分别为前后轴侧偏角),等于初始转向的阿克曼角L/R,则转向时的几何关系,如式(1)所示。
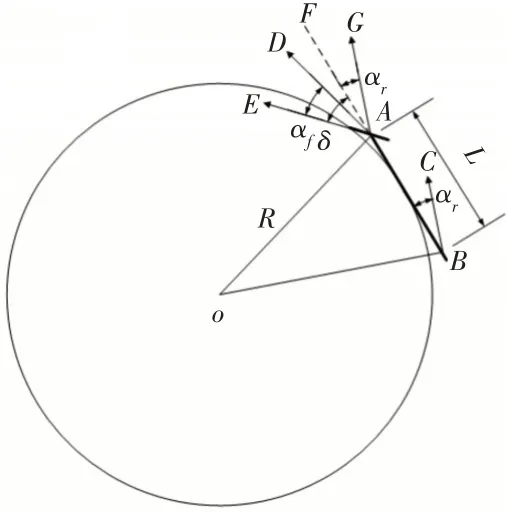
图1 定半径方法原理Fig.1 Principle of Fixed Radius Method
由不足转向度的定义,定半径转向时不足转向度的计算方法,如式(2)所示。由于δ为前轮转角,为把转向系统的柔性考虑进去,实际测试时通常取方向盘的转角除以转向传动比得到前轮转角。
后轴侧偏角随侧向加速度逐渐增大,即向量AG顺时针方向转动,假设前轴侧偏角的变化与后轴相同,则向量AD也顺时针转动相同的角度,此时前轮转向角不需要做任何修正,不足转向度K=0,汽车为中性转向。
随侧向加速度的增加,如果前轴侧偏角的增大量大于后轴,这时如果仍然保持转向角不变,会导致AD沿顺时针转动的角度大于AG,则∠DAG减小,轴距不变,即车辆运行轨迹的半径增大,如果需要完成定圆,则需要增大转向角,即向量AE向逆时针增大,带动向量AD也向逆时针转动αf-αr角度,从而保持∠DAG不变,车辆运动轨迹保持在定圆上。
如果车辆特性为过度转向,则需要减小转向角。
在试验过程中,圆心O为汽车做平面运动的瞬时中心,驾驶员需要在试验过程中始终保持转向半径不变,这种试验方法对驾驶员的要求较高。
定半径方法有两种细分的方法,分别是离散增加车速和连续增加车速两种方法。其中连续增加车速的方法操作较为方便。离散增加车速方法对驾驶员车速控制要求较高。因为侧向加速度与速度的平方成正比,所以车速越高,要想采集同样间隔的加速度点,需要的车速间隔越小,例如,对于半径为100m的圆周,车速从80km/h,增加到90km/h,侧向加速度的增量为0.13g,侧向加速度间隔太大,假如将侧向加速度的间隔变为0.02g,则车速需从80km/h增加到81.3km/h,这对试验员与车辆的要求过高,另外因每条数据要求车达到稳态3s以上,所以试验数据量较大,占用场地时间长导致费用增加,所以连续增加车速的方法较为实用。
2.2 定转角方法
定转角方法的测量原理,如图2所示。O0为车速为0时的转弯中心,O为某时刻的转弯中心,在试验过程中转向角∠EAF保持不变,随车速的提高,侧向加速度也在提高,前后轴的侧偏角也在增大,因δ-(αf-αr)=L/R,如果αf-αr不变,则转向半径R不变,即∠DAG不变,即为中性转向。

图2 定转角与定车速方法测试原理Fig.2 Principle of Fixed Steering Wheel and Fixed Speed Method
如果车为不足转向,随车速增大Δaf>Δar,即∠EAD的增大量大于∠FAG的增大量,而向量AE相对于AF固定不变,所以∠DAG变小,即∠AOB=∠DAG=L/R减小,转向半径增大。反之,如果车为过度转向,转向半径随车速增加而减小。
在加速度增加的过程中,由于Δaf-Δar=-Δ∠DAG=-Δ∠AOB=L/R0-L/R=L(1/R0-ω/v),根据不足转向度的计算公式可以得到公式,如式(3)所示。
这种方法的好处是不需要转向传动比的测试,缺点是需要的场地比较大。
2.3 定车速方法
定车速方法是固定车速,逐渐增加方向盘转角的方法。仍然可以用图2来解释。方向盘转角的增加有两种效应,一部分用于轨迹的曲率半径变小造成的阿克曼角的增加,另一部分用来纠正车的不足转向或过度转向造成的轨迹偏离。以车在不同半径圆上低速行驶为例,从半径大的圆向小的圆上行驶时,需要增加转向角,其次,因为侧向加速度增加导致了前后轴侧偏角的差异也需要用方向盘的转角来补充。
当在某一固定车速下行驶时,随转向角的增大,侧向加速度随之增大,如果车辆是中性转向,则方向盘转角的增加只是带来了汽车行驶轨迹曲率半径的变化,AE逆时针转动,带动AD逆时针转动(幅度小于AE,因为前轮侧偏角∠EAD增大),同时后轮侧偏角∠FAG增大,中性转向的车前后轴的侧偏角的增加量相等。
将式(4)中左右两端均加上Δ∠DAF,可以得到:
即方向盘转角的增大量完全用来将转向半径变小。
即需要增加的方向盘转角要大于阿克曼角的增加。其差值等于前后轴侧偏角增大量的差值,即:
用此方法测试不足转向度时,需要从前轮转角减去当时的阿克曼角,才能得到前后轴侧偏角的差值。
在定车速转向过程中,式(1)中的曲率半径为变量,上式可以进一步写为:
其中角速度的单位为°/s,角度单位为°。用前后轴侧偏角的差与侧向加速度的关系计算不足转向度。
定车速方法有两种:(1)依次行驶在不同半径的圆上;(2)每次固定一个转角。不管采用哪种方法,需要的试验时间都比较长,在此采用了连续缓慢打方向盘的方法,由于转角变化较慢,可以认为是准稳态过程。
这里采用以上三种方法对汽车的响应量进行对比,根据场地情况,确定了相应的试验条件分别为:(1)定半径方法采用半径为45m的圆;(2)定转角方法采用的方向盘转角为120°;(3)定车速方法采用的车速为50km/h。试验所采用的车为一杂合车,设计载荷2305kg,轴距2890mm,前后轮胎均为235/50 R19,转向传动比16.2,从后面的测试结果可以看出,由于该车为杂合车,硬点存在左右不一致的情况,导致左右转向时响应不对称,但这里主要是对比不同方法之间的差异,对于左右响应不对称的指标采用了只对比同一方向响应的方法。
3 指标不同获取方法的差异
3.1 侧向加速度
理论上,刚体在稳态圆周运动过程中,其特性与其向心加速度有关,在车辆动力学中,习惯用侧向加速度进行分析,两者之间夹角等于质心侧偏角,如图3所示。在稳态条件下,大多数情况下质心侧偏角较小,可以用向心加速度代替侧向加速度,但当质心侧偏角较大时,侧向加速度必须由向心加速度经过修正得到。

图3 向心加速度与侧向加速度的关系Fig.3 The Relationship of Centripetal Acceleration and Lateral Acceleration
在ISO 4138标准中给出了三种计算向心加速度的算法[8],在定圆回转中,对这几种算法分别加以修正得到侧向加速度,与陀螺仪直接采集的数据进行了对比,具体结果,如图4~图7所示。
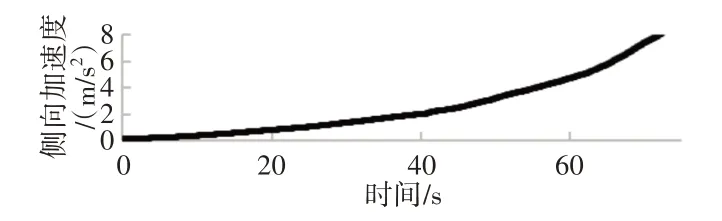
图4 用车速与转向半径计算的侧向加速度Fig.4 Lateral Acceleration by Speed and Radius

图5 用车速与横摆角速度计算的侧向加速度Fig.5 Lateral Acceleration by Speed and Yaw Rate

图6 用横摆角速度与圆半径计算的侧向加速度Fig.6 Lateral Acceleration by Yaw Rate and Radius
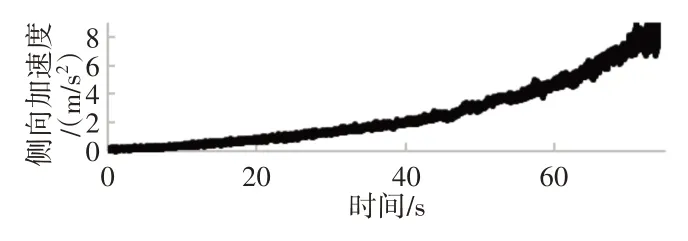
图7 陀螺仪测试得到的侧向加速度Fig.7 Lateral Acceleration by Gyro Test
从测试曲线可以看出,利用车速平方除以圆半径的方法计算并利用质心侧偏角修正后得到的侧向加速度震荡更少。
另外,在定半径试验中,当利用速度平方除以半径计算向心加速度时,车辆在试验过程中有可能会稍微偏离行驶轨迹,导致计算结果有偏差。假设在试验过程中偏离轨迹,则实际车辆的加速度的偏差与圆的半径关系很大,用速度平方除以半径计算侧向加速度的偏差,如图8所示。在半径为30m和半径100m时,车偏离轨迹0.5m时加速度计算值与实际值的偏差,从图中可以看出圆半径对侧向加速度计算值偏差的影响。所以如果场地条件允许,尽量选择大半径的圆进行试验,ISO4138也推荐半径100m的圆作为试验条件。
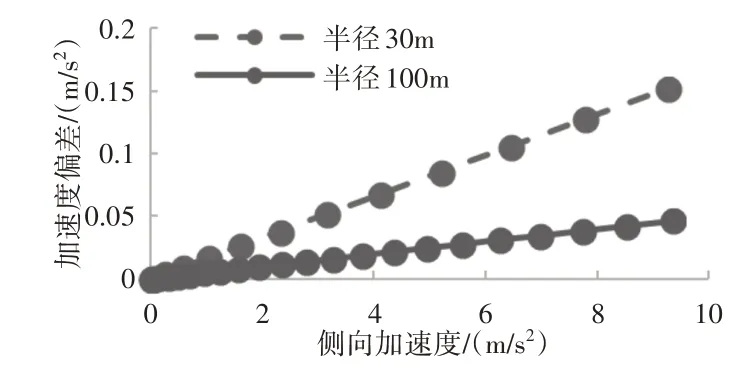
图8 圆半径对侧向加速度计算结果的影响Fig.8 The Effect of Different Radius on Lateral Acceleration
3.2 不同设备采集的侧倾角的差别
在试验过程中,采取了两种方式获取侧倾角,第一种采用陀螺仪输出的侧倾角,第二种用两个激光位移传感器测量对地的距离进行换算。
第一种方法,由于陀螺仪直接测得的是加速度,侧倾角需要通过积分进行计算,积分过程中,侧倾角会存在震荡,使得侧倾角随侧向加速度的变化非常不线性。
第二种方法,首先测量左右位移传感器的对地距离差,之后计算侧倾角。两种方法的对比结果,如图9所示。可以看出,利用陀螺仪测得的结果震荡较大。
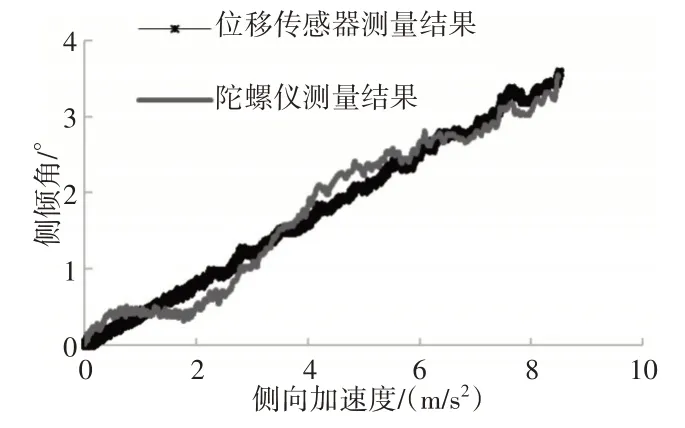
图9 侧倾角测量结果对比Fig.9 Comparison of Roll Angle Test Results
计算侧倾角梯度时,不同的方法也会得到不同的拟合结果,用两种方法(Laser为位移传感器,RT为陀螺仪)的结果对比,拟合区间为0到最大加速度,从图中可以看出位移传感器左右侧倾角测量结果一致,而陀螺仪的测试结果左右存在差别,如图10所示。
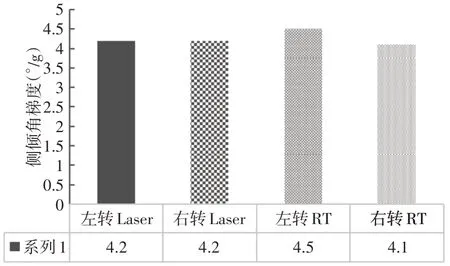
图10 0-最大侧向加速度区间侧倾角梯度的对比Fig.10 Comparison of Roll Gradient Between 0-Max Lateral Acceleration
如果在加速度(1.5~2.5)m/s2范围做线性拟合,从图11 可以看出侧倾角梯度差别更大。

图11 在小加速度区间得到的结果对比Fig.11 Roll Gradient Comparison by GB Processing Method
从以上关于侧倾角测试结果的对比可以看出,位移传感器测量精度高于陀螺仪,尤其是拟合区间较小时。
4 不同试验方法时指标的对比
4.1 侧倾梯度的对比
运用不同的试验方法,利用位移传感器对侧倾角进行了采集,并对侧倾梯度的测试结果进行了对比,定半径,定车速,定转角三种方法的测试结果,拟合区间为全部加速度区间,其结果为左右转平均值,如表1所示。

表1 不同试验方法的侧倾梯度对比Tab.1 Comparison of Roll Gradient by Different Test Method
从上表的对比结果可以看出,不同方法测试得到的侧倾梯度的结果相差较小。
4.2 方向盘力矩
在此对比了三种试验方法方向盘力矩的测量结果,如图12所示。从图中可以看出三种试验方法得到的结果均不相同,并且曲线变化的趋势也不一致。

图12 转向力矩随侧向加速度的变化对比Fig.12 Comparison of Steering Torque with Lateral Acceleration
为方便对比,将左转拟合结果进行对比,如图13所示。
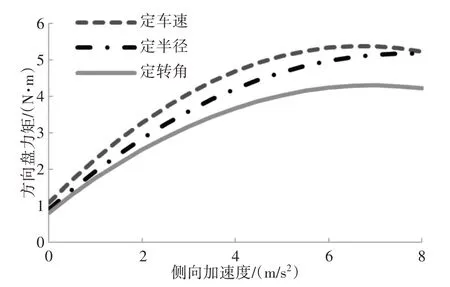
图13 转向力矩拟合曲线Fig.13 Fitting Curve of Steering Torque
从图13可以看出,三种方法得到的结果都不一样,本次试验中,定车速的转向力最大,定半径次之,定转角最小。假如用拟合曲线计算0.5g时的侧向加速度作为考查指标的话,其数值,如表2所示。

表2 0.5g侧向加速度时的方向盘力矩Tab.2 Steering Torque at 0.5g Lateral Acceleration
从0.5g时的结果可以看出,定车速与定转角的转向力差别较大,定车速比定转角大28%。
4.3 不足转向度
对于乘用车,一般侧向加速度在0.4g以下时响应为线性。在侧向加速度0.05g之下时试验数据经常波动较大,因此,在这里计算不足转向度的侧向加速度范围为(0.05~0.4)g。该车方向盘转角梯度的拟合结果,利用转角梯度除以转向传动比可以得到不足转向度,如图14所示。
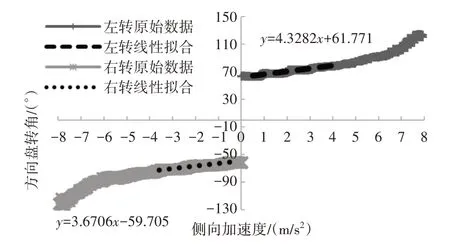
图14 定半径方法不足转向度的测试结果Fig.14 Understeer Gradient by Fixed Radius Method
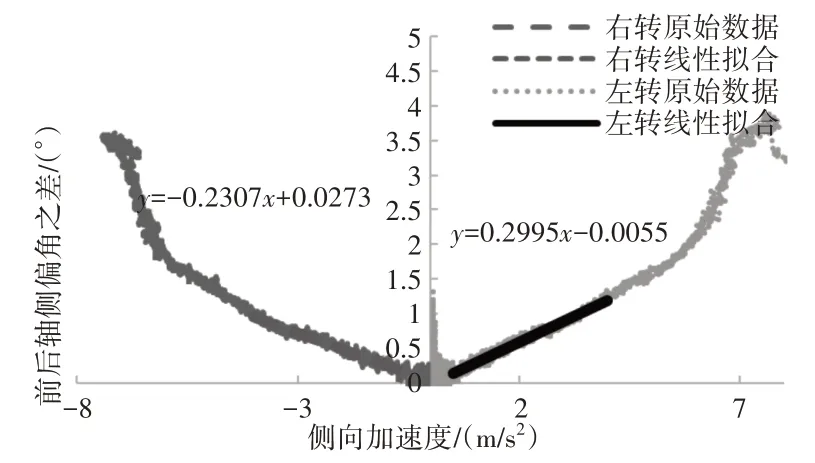
图15 定转角方法计算得到的不足转向度Fig.15 Understeer Gradient by Fixed Angle Method
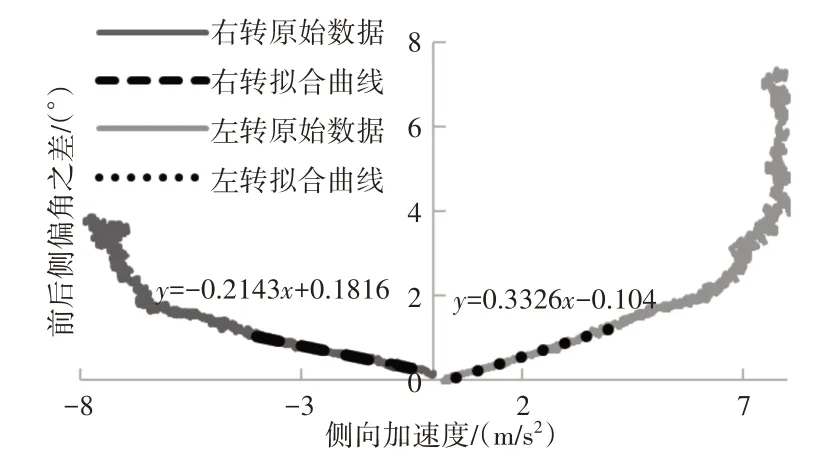
图16 定车速方法不足转向度的测试结果Fig.16 Understeer Gradient by Fixed Speed Method
该车转向传动比为16.2,得到该车左转不足转向度值为2.62°/g,右转不足转向度为2.2°/g。
第二种方法为定转角方法,利用定转角方法进行计算时,先求出1/R0-ω/v的时域曲线,然后根据轴距L=2890mm,在(0.05~0.4)g范围内拟合得到前后轴侧偏角之差随侧向加速度变化的斜率即是不足转向度,左转结果为2.9°/g,右转结果为2.3°/g。
第三种方法为定车速方法,定车速方法得到的结果为,左转3.3°/g,右转2.1°/g。
将以上结果总结,如表3所示。

表3 三种试验方法不足转向度结果对比Tab.3 Comparison of Understeer Gradient by Different Test Method
从表3结果可以看出:(1)三种测试方法左转的不足转向度均大于右转,说明车本身存在不对称的因素;(2)单独看左转或右转的结果可以看出,三种方法得到的不足转向度结果有偏差,特别左转差别较大,说明不同方法得到的不足转向度的结果可比性较差。
5 结论
通过以上测试方法的对比可以看出:
(1)对于侧倾角的测量,利用位移传感器得到的测试数据要优于利用陀螺仪;
(2)在定半径试验中,利用速度平方除以转弯半径计算侧向加速度的方法数据震荡较小,圆的半径越大准确程度越高;
(3)在定半径方法中,离散增加车速的方法比连续增加车速的方法试验难度大,耗时长;
(4)侧倾梯度的测试结果,这几种试验方法差别较小;
(5)不足转向度与转向力的测试结果有差异,在运用这些指标时需要了解其试验方法,以便不同车有可比性。
猜你喜欢
中学生数理化·七年级数学人教版(2021年9期)2021-11-20
民用飞机设计与研究(2020年4期)2021-01-21
新课程·中学(2019年7期)2019-09-17
知识经济·中国直销(2018年3期)2018-04-12
物理教学探讨(2018年1期)2018-02-13
传媒评论(2017年8期)2017-11-08
解放军健康(2017年5期)2017-08-01
知识经济·中国直销(2016年2期)2016-11-07
交通建设与管理(2015年13期)2015-03-20
汽车零部件(2014年5期)2014-11-11
