
PSOGA算法在望远镜实验基座控制系统中的应用
2023-11-28 11:41王国民
机械设计与制造 2023年11期
徐 蕾,王国民,王 海,徐 进
(1.中国科学院国家天文台南京天文光学技术研究所,江苏 南京 210042;2.中国科学院天文光学技术重点实验室(南京天文光学技术研究所),江苏 南京 210042;3.中国科学院大学天文与空间科学学院,北京 101408)
1 引言
为开展北半球可见天区的原初引力波观测,拟在西藏阿里地区建设原初引力波探测望远镜。引力波望远镜探测基座为方位-俯仰型结构,方位轴与地面垂直,俯仰轴与方位轴垂直,具有结构紧凑、承载能力强等优点。区别于普通光学探测望远镜,为满足观测要求,实现对可见天区的扫描,引力波探测望远镜需要方位轴的高速高精度扫描,最大扫描速度可达20°/s,精度要求不超过20″。因此,研究如何在高速情况下的保持高精度控制是其中的关键问题。
引力波探测望远镜基座的控制系统采用Delta Tau Turbo PMAC系列UMAC作为运动控制器,内部以PID控制与速度/加速度前馈调节器的组合作为控制器[1],因此望远镜的控制精度与PID控制与前馈控制的参数选取密切相关。
传统的PID工业整定法[2]对非线性、时滞、时变系统难以达到控制要求,因此智能化的方法逐渐应用于参数整定中,主要有:基于继电反馈的参数整定方法、基于模式识别的参数整定方法等。基于继电反馈的方法鲁棒性强,但整定周期过长。基于模式识别的方法应用简单,不需要已知模型阶次等先验信息,但启发规则复杂。而且这些智能整定方法无法作用于特定的优化指标,如ISE,IAE,ITAE等,因此需要智能优化算法,如遗传算法[2]、粒子群算法[3]等。采用遗传算法(GA),可以获得较好的控制精度和抗干扰能力,但存在未成熟收敛和寻优效率低的问题。采用粒子群算法(PSO),可以获得较好的控制精度、稳定性和抗干扰能力,但易陷入局部极值。因此,一些学者将遗传算法与粒子群算法融合(PSOGA)[4],以充分发挥两种算法的优点,克服二者的缺点。目前PSOGA算法应用于共阵天线模式优化、雷达调度、液体控制系统、机器人控制器等。
综上考虑,结合阿里原初引力波探测实验基座对方位轴高速高精度的控制要求,这里对GA算法、PSO算法及PSOGA算法的性能进行仿真对比,并将优化参数应用于实验电机,得到实际的控制结果。通过对比三种算法在不同速度下的调节时间与均方误差,验证了PSOGA算法的可行性。
2 控制器驱动电机模型
实验验证过程为:DELTA TAU公司的UMAC运动控制器通过Geo Direct PWM Drive驱动器控制Etel公司的TMB360力矩伺服电机,通过德国某公司的RON287码盘读取位置反馈。控制器控制电机根据程序增加命令位置,与位置传感器读取的实际位置比较,并计算输出。仿真中采用三环控制系统:电流环、速度环、位置环。
2.1 电机参数
实验中采用TMB360 电机作为驱动。为在SIMULINK 中建立系统的仿真模型,需根据实测数据,计算电机的转动惯量、阻尼系数、空载时的负载扭矩以及电机的粘滞系数等参数。根据电机的力矩平衡公式:
式中:T—输出力矩;T0—负载力矩;Ω—角速度;fc—粘滞摩擦力矩。使用UMAC驱动电机,在系统开环状态下,分别施加不同扭矩命令、速度命令,测量电机的电流、速度、加速度数据,并对数据进行最小二乘法拟合,获得相关参数如下:
固定负载扭矩T0=3.6696N·m
阻尼系数B=0.1502N·m(/rad/s)
转动惯量J=0.4688kg(/rad/s²)
粘滞系数fc=0.1263N·m(/rad/s)
2.2 电流环
UMAC中电流调节器结构为PI结构,其原理图,如图1所示。
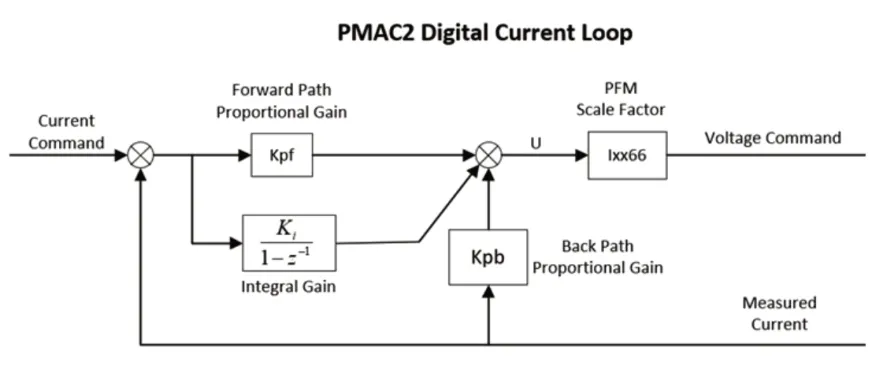
图1 UMAC中的电流调节器结构Fig.1 Current Regulator Structure in UMAC
图中:Kpf—前向比例增益;Ki—积分增益,其计算公式为:
式中:Isat—相电流A/D转换器最大电流,Isat=Vsat/Kc;Kc—电流传感器增益;Rpn—电机相间电阻;Vcmax—A/D转换器最大电压;ζ—期望阻尼比;Lpn—电机相间电感;VDC—放大器的直流电压;ωn—期望自然频率。
根据公式计算可得:电流调节器Kpf=0.672,Ki=0.036。
2.3 速度环与位置环
本实验控制系统的速度环与位置环结构包括前馈控制、PID控制等结构,结构由UMAC控制器给出,如图2所示。

图2 UMAC控制器结构Fig.2 Structure of UMAC Controller
图中:KP、Ki、Kd、Kvff、Kaff—实验待优化参数。
3 智能算法
分别采用GA算法、PSO算法以及PSOGA算法的优化控制器参数。
3.1 GA算法
遗传(GA)算法是由美国Michigan 大学的Holland 教授于1969年提出的模拟进化算法,可用来求解极值问题,具有较强的鲁棒性和通用优化能力,广泛应用于自动控制、计算科学、模式识别等领域。其算法流程图,如图3所示。
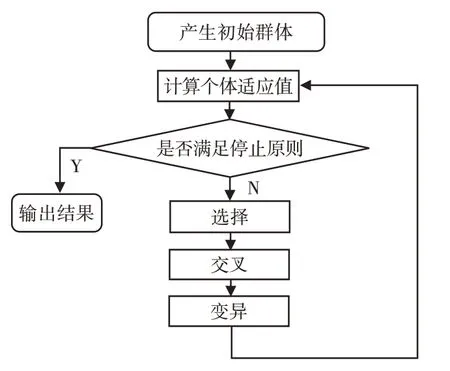
图3 GA算法流程图Fig.3 Flow Chart of GA Algorithm
在最优化过程中,用适应度函数来评估个体的优劣,其选取直接影响算法性能,实验中选取的适应度函数为绝对误差积分准则(IAE)基于这种准则设计的系统,具有适当的阻尼和良好的瞬态响应[5]。目前常用参数范围是种群规模为[20,200],交叉概率为[0.5,1.0],变异概率为[0,0.05][6]。在本实验参数优化中,设定种群规模为100、种群区间为[0,1000000]、交叉概率为0.6、变异概率为0.05、迭代遗传次数为100,误差准则选取IAE,终止条件选取超过迭代次数或适应值小于0.1。
3.2 PSO算法
粒子群算法(PSO)是由Kennedy 和Eberhart 等于1995 年开发的模拟鸟群运动的随机优化技术。种群中的个体称作微粒,在D维空间中搜索潜在解,用位置、速度和适应度值作为粒子特征。微粒在搜索空间中不断改变状态,直到最优状态。PSO算法的流程图,如图4所示。
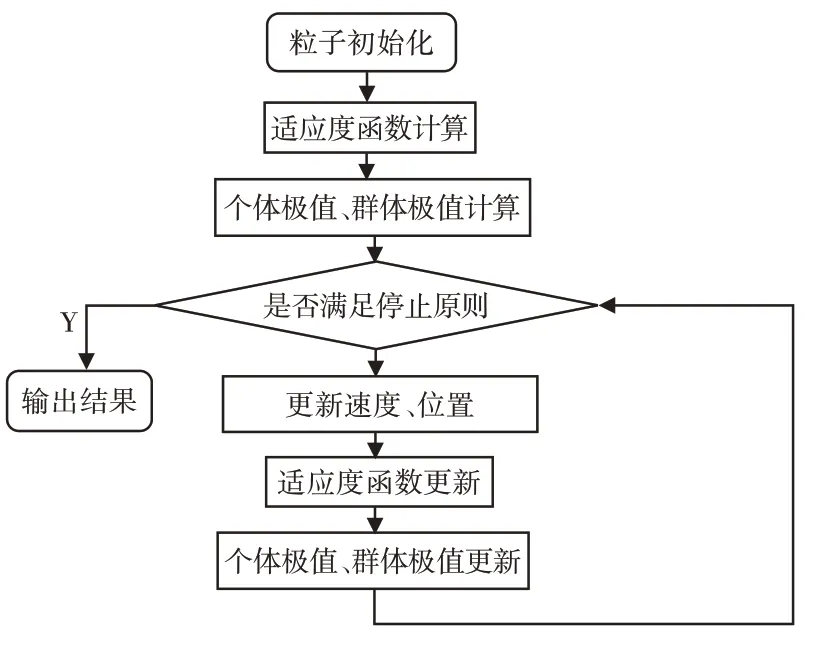
图4 PSO算法的流程图Fig.4 Flow Chart of PSO Algorithm
粒子通过个体极值和群体极值更新自身的速度和位置,更新公式为:
式中:V—速度;ω—惯性因子;c1、c2—系数;r1、r2—随机数;X—位置;Pid—个体极值Pbest;Pgd—群体极值Gbest。
通常令学习因子c1=c2=2,r1、r2为[0,1]随机数,惯性因子ω在[0.4,0.9]时,能较快定位最优解的大致位置[7]。在本次优化中,设定粒子群规模100、搜索区间[0,1000000]、惯性因子0.6、迭代次数100、c1=2、c2=2;误差准则选取IAE,终止条件选取超过迭代次数或适应值小于0.1。
3.3 PSOGA算法
GA 算法和PSO 算法在最优化处理中应用广泛,但遗传算法存在收敛慢、局部搜索能力差等现象,PSO 算法存在全局收敛性差、易陷入局部极值等问题,因此提出PSOGA 融合算法,既保证全局搜索能力,又有较快的收敛速度,且不易陷入局部最优,从而提高算法的性能。
PSO与GA算法的融合有多种方式,如并行式、串行式与嵌入式混合。并行式混合即两个算法并行运行,算法保持各自独立性,易于实现,但两种算法之间没有交流,缺点仍然存在。串行式混合将两种算法呈串行结构先后寻优,算法相对简单,可以改善收敛速度,但会增大时间复杂度。嵌入式混合是将其中一个算法思想嵌入另一个算法,既能充分发挥两种算法的优点,又能摒弃两者缺点[6]。
本次实验采用一种将GA 算法嵌入PSO 算法中的融合算法(PSOGA)[8],基本思想为:在PSO 算法中,引入GA 算法的选择、交叉和变异操作,在每次迭代过程中选取适应度好的前一半粒子进入下一代,后一半粒子经过选择、交叉和变异操作产生子代,与父代作比较,适应度好的前一半粒子进入下一代。其算法流程图,如图5所示。
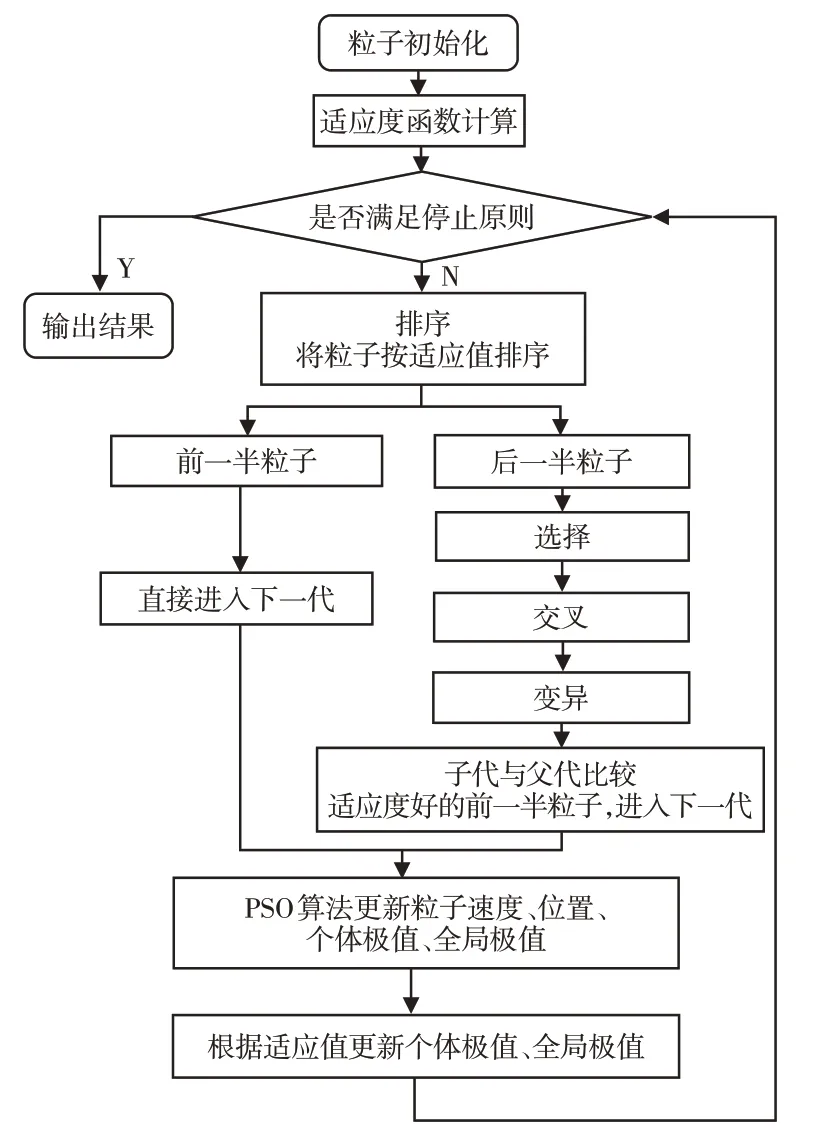
图5 PSOGA算法的流程图Fig.5 Flow Chart of PSOGA Algorithm
在本次参数实验中,为与GA、PSO算法对比,选取相同的参数,粒子群规模为100、搜索区间[0,1000000]、惯性因子0.6、迭代次数为100、c1=2、c2=2、交叉概率为0.6、变异概率为0.05、误差准则选取IAE,终止条件选取超过迭代次数或适应值小于0.1。
4 实验结果
4.1 三种算法优化结果
GA、PSO、PSOGA 三种算法优化UMAC 中控制器参数结果,如表1所示。
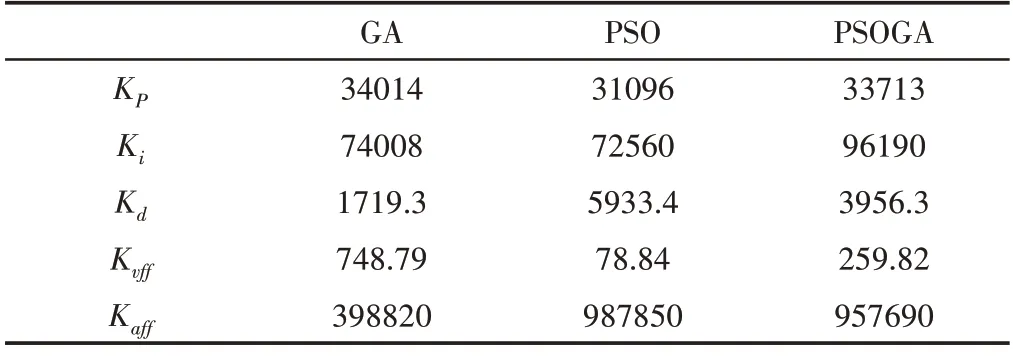
表1 三种算法优化结果Tab.1 The Results of Three Algorithm Optimization
4.2 三种算法参数的仿真阶跃响应曲线
GA、PSO、PSOGA三种算法参数在SIMULINK中的仿真阶跃曲线,如图6所示。三种算法的阶跃响应指标对比,如表2所示。其中,调节时间取误差稳定在稳态值的±2%的范围的最短时间。根据三种算法的阶跃响应曲线与指标数据可知,PSOGA算法调节时间较短,分别为PSO 算法的47.06%,为GA 算法的46.03%;且PSOGA 算法具有超调量小的特点。PSOGA 算法的参数在阶跃响应中具有较好的效果。

表2 三种算法阶跃响应指标Tab.2 Step Response Index of Three Algorithms

图6 三种算法的阶跃响应曲线Fig.6 Step Response Curves of the Three Algorithms
4.3 三种算法参数的仿真与实测跟踪曲线
由于方位轴的扫描速度为(5~20)°/s,实验中取最大速度20°/s测量三种算法的跟踪响应。仿真跟踪曲线,如图7所示。实际跟踪曲线,如图8所示。根据20°/s速度下的仿真和实际误差曲线可知:相比于PSO算法和GA算法,PSOGA算法具有更短的稳定时间和相对较小的误差。且在实际测试中,PSOGA 算法在5°/s、10°/s的速度下,也具有相同的优越性。

图7 20°/s时,三种算法的仿真跟踪误差曲线Fig.7 Tracking Error Curves of the Three Algorithms at Different Speeds
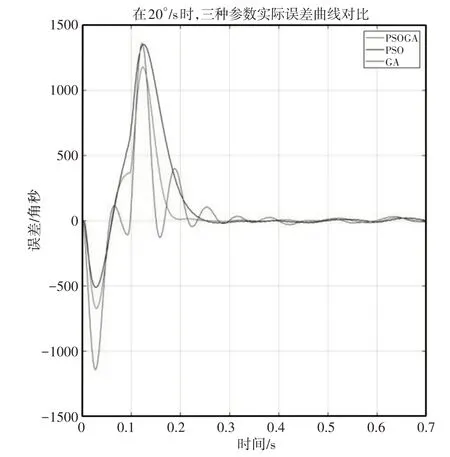
图8 20°/s时,三种算法的实际跟踪响应曲线Fig.8 Tracking Error Curves of the Three Algorithms at 20°/s
4.4 实际与仿真数据对比
三种算法在20°/s 时的仿真和实测误差指标,如表3 所示。其中,稳定时间取误差稳定在20″内的时间,均方根误差取稳定时间之后的误差均方根值。

表3 三种算法的跟踪响应指标Tab.3 Tracking Response Indicators of Three Algorithms
根据三种算法的误差指标可知:在20°/s 的仿真中:PSOGA算法的稳定时间为PSO算法的72.13%、GA算法的70.38%;误差均方根为PSO算法的68.21%、GA算法的66.64%。在20°/s 的实测中:PSOGA算法的稳定时间为PSO算法的78.70%、GA算法的43.34%;误差均方根为PSO 算法的77.15%、GA 算法的73.60%。因此,PSOGA算法在仿真和实际应用中都具有稳定时间短,均方根误差小的特点,具有更好的控制效果。
5 结论
实验证明,不论是在仿真还是实测中,对比于GA、PSO算法,PSOGA 算法都具有更好的跟踪效果。因此,在对探测基座UMAC运动控制器的应用中,可以采用PSOGA 算法进行参数优化,使系统具有稳定时间短,误差小,更适合高速跟踪的特点。
猜你喜欢
黑龙江大学自然科学学报(2021年4期)2021-11-19
测控技术(2018年10期)2018-11-25
天津教育·下(2018年9期)2018-07-13
浙江工业大学学报(2017年5期)2018-01-22
自动化博览(2014年9期)2014-02-28
自动化博览(2014年4期)2014-02-28
电子设计工程(2014年17期)2014-02-27
物理与工程(2014年4期)2014-02-27
山西大同大学学报(自然科学版)(2014年3期)2014-01-23
电力自动化设备(2013年11期)2013-09-18
