基于越野工况辨识的轮毂电机车辆驱动力控制
2023-11-27 07:04:12付翔王玉新刘道远王纪杰
中国机械工程 2023年8期
付翔 王玉新 刘道远 王纪杰


摘要:针对现有工况辨识策略在识别地形起伏度、变附着路面的不足,基于LuGre轮胎模型构建观测空间方程来快速捕捉附着条件的瞬态变化,基于模糊控制算法将实时工况与6种典型工况映射,根据工况辨识结果设计了闭环控制策略以自适应调节轮毂电机的实时输出力矩。仿真测试与实车验证表明,基于越野工况辨识的驱动力控制策略可快速跟踪各轮附着极限和接地状态的瞬态变化,自适应调节车辆的实时驱动功率,达到车辆动力性与稳定性的综合优化。
关键词:轮毂电机车辆;模糊控制算法;越野工况辨识;驱动力控制
中图分类号:U467
DOI:10.3969/j.issn.1004-132X.2023.08.010
Driving Force Control of Hub Motor Vehicle Based on Off-road Condition Identification
FU Xiang WANG Yuxin LIU Daoyuan WANG Jijie1,2,3
Abstract: According to the shortcomings of the existing condition recognition strategy in identifying undulating terrain and variable adhesion road surfaces, based on the LuGre tire model, observation space equations were constructed to quickly identify the transient changes of adhesion conditions. The real-time working conditions were mapped with 6 typical working conditions based on fuzzy control algorithm, and a closed-loop control strategy was designed to adaptively adjust the real-time output torque of hub motors based on the working condition identification results. Simulation test and real vehicle verification show that the drive force control strategy based on the off-road condition identification may quickly track the transient changes of each wheel adhesion limit and grounding state, and adaptively adjust the real-time driving power of the vehicle to achieve comprehensive optimization of vehicle power performance and stability.
Key words: hub motor vehicle; fuzzy control algorithm; off-road condition identification; driving force control
0 引言
轮毂电机驱动系统具有功率密度大、传动效率高、驱/制动力矩分配自由度高的独特优势。目前,针对轮毂电机驱动车辆在良好铺装路面上行驶的驱动控制研究较为丰富,而对行驶工况复杂且道路环境多变的越野工况下的车辆机动性与稳定性的研究较少。
秦也辰[1]基于车辆悬架动态响应进行路面工况辨识并设计了悬架系统逆向识别法,通过车辆动力学响应与自适应神经网络算法识别路面不平度。HAN等[2]通過车辆悬架位移计算路面功率谱密度来识别路面不平度,通过纵向振动加速度的时间序列识别路面坡度,依据发动机输出扭矩估计滚动阻力系数,从而辨识软硬路面。赵永坡等[3]对比分析了轮胎在铺装路面和沙地下的受力状况,而后基于轮边加速度阈值控制和超阈值计数器,得到模糊化的路面识别结果。URAULIS等[4]基于深度学习的图像识别算法对12种路面进行分类。现有工况辨识常将识别算法与车辆状态、悬架、驱动系统相结合,建立路面高程信息以准确分类路面等级,但大量数据集处理导致系统具有一定滞后性,且研究多聚焦于铺装路面,在识别变附着路面、地形起伏方面没有深入研究。
轮毂电机驱动车辆具有多个驱动执行器,驱动力分配灵活、复杂,基于驱动系统效率优化的最优分配考虑约束条件对四轮转矩进行非线性求解,综合优化车辆性能,但计算量大导致算法实时性较差[5-7]。基于平均分配与基于轴荷比分配[8-9]等基于规则的驱动力分配对越野工况等强干扰环境具有较优的适应性。本文针对表征路面激励特征的状态参数设计了隶属度函数,基于模糊识别,将实时工况与6种越野工况映射;而后根据工况辨识结果设计前馈-反馈闭环控制策略以自适应调节轮毂电机的实时输出力矩,实现不同工况下驱动功率利用率的优化和车轮纵向稳定性的快速收敛。
1 车轮附着条件观测器
轮胎的受力特性是研究车辆动力学性能的基础,经验/半经验公式的轮胎模型为离线模型,在强非线性的非铺装道路下的鲁棒性差。LuGre轮胎模型在描述轮胎接触面弹性变形的同时,考虑了摩擦效应,可以准确捕捉轮胎力的瞬态变化。LuGre轮胎模型原理公式为
如式(36)所示,为准确判断腾空车轮是否重新接地,运用相平面方法制定判断条件:Fres_iF·res_i>0∩Fres_i>0∩F·res_i>0,并引入F^res/4和F·res_high分别对单轮行驶阻力及其斜率进行阈值判断,车轮行驶阻力及其斜率超过阈值说明滚动阻力、附着极限具有显著增长的趋势,满足接地状态切换的条件;状态观测单元通过读取判断时刻前五个采样周期的数据,计算平均值近似得到轮i实际的行驶阻力Fres_i及其变化率F·res_i。
根据四轮实时接地状态划分三輪附着、两轮附着工况,各轮的垂向载荷分布如表1、表2所示。
综合车轮附着条件观测与垂向载荷估计,得到各车轮附着极限的估计值:
2.2 越野车行驶工况在线辨识策略
根据路面垂向激励差异将越野车行驶工况分为越野路面工况与越野地形工况:
(1)越野路面工况。各轮接地高度差异小,轮荷转移主要由纵向、横向的惯性力造成。越野路面工况可分为高附着、低附着、变附着三种。
(2)越野地形工况。高路面起伏度致使各车轮接地高度及其变化率差异明显,车辆重心、行驶阻力、垂向载荷与附着条件均呈现强非线性特征,可将越野地形分为坡道、扭曲起伏、陡峭路障三种。
将F~res、Fi、Spini、εi等表征路面激励特征的状态参数输入至动态隶属度函数,基于模糊规则表将实时工况与6种越野工况进行映射,并进行解模糊化处理,动态调节驱动功率输出约束系数及反馈增益,以改善车辆稳态收敛性能,优化各轮附着利用率。
2.2.1 模糊隶属度函数确定
状态参数均按照较小S-、适中M-与较大L-建立模糊子集{S-,M-,L-},状态参数论域均为[0,1]。
2.2.2 模糊逻辑规则制定
以各个表征路面激励特征的状态参数为输入,基于模糊规则表将行驶工况与6种越野工况映射。模糊逻辑规则如表3所示,表中[0,1]表示此状态参数的取值不改变判断结果。
2.3 驱动力控制策略
基于越野工况的辨识结果,采用前馈-反馈的闭环架构设计驱动力控制策略。前馈环节根据垂向轮荷的实时估计值与越野工况辨识得到的电机实时峰值驱动力矩TAcc-max进行力矩矢量的预分配,反馈环节基于四轮滑转率控制误差和解模糊得到的反馈增益KFB进行力矩反馈调节。
以轮毂电机i的驱动功率利用率Di作为状态变量,优化驱动力控制响应性。将轮i的滑转率变化率λ·i(vx,ωi)与车轮纵向动力学模型联立得到驱动时力矩的传递方程:
3 离线仿真及实车测试
3.1 变附路面急加速行驶仿真测试
本节设计车辆在对开路面(左侧高附着、右侧低附着)、对接路面(高附着至低附着)下急加速仿真试验,其中,附着系数为高附着0.8,低附着0.3。仿真结果如图1、图2所示。
图1表明:车辆加速会导致垂直载荷后移,因此后轴电机驱动力矩指令显著大于同侧的前轴电机;得益于较大的附着极限,同轴的左侧高附着车轮电机驱动力矩指令大于右侧低附着车轮,有效提高了轮毂电机驱动功率的利用率。随着车速和轮速的提高,电机驱动力矩指令减小直至第11 s时达到右侧低附着车轮的附着极限,此时,同轴异侧电机输出力矩差产生的附加横摆力矩减小至0,各轮滑转率实现同步收敛,显著提高了车辆的横向稳定性。
图2表明,越野工况辨识策略能在车轮驶入低附着路面时附着系数突降后迅速减小驱动功率利用率峰值,实时调整电机的峰值输出力矩,避免车轮过度滑转。车轮驱动力矩在1 s、3 s突破附着极限后,反馈控制迅速增大反馈增益,车轮滑转率在1 s内迅速收敛,而后减小反馈增益、小幅调节电机驱动力矩指令,平滑提高轮胎附着利用率,有效提高车辆的驱动效率。
3.2 越野地形纵向控制仿真测试
车辆匀速通过上坡扭曲路和跨越垂直路障的仿真测试环境的模型参数如表4所示,其中,路面附着系数为0.8。
图3a、图3b表明,越野工况辨识策略能快速捕捉到附着极限显著提高或重新接地车轮的方位,并将当前工况分类为行驶阻力较大,驱动功率利用率峰值α需维持为1的扭曲地形,同时允许轮毂电机短时过载以克服较大的行驶阻力、避免车速的大幅下降。图3c表明反馈控制环节可使腾空车轮迅速降速,有效提高驱动效率与滑转率的稳态收敛性能。前馈-反馈闭环控制下,车辆纵向车速始终大于6 km/h,腾空车轮的线速度低于30 km/h,表明控制策略在上坡扭曲路地形下实现了驱动功率利用率的全局优化。
0.3 s时,前轮跨越垂直路障,车辆行驶阻力突然增大,车速明显下降,如图4a所示,前馈环节输出力矩不断增大但电机转速在低速区持续震荡。前轮在0.3 s内成功跨过垂直路障,轮毂电机驱动系统综合输出力矩峰值为2240 N·m。前轮失附腾空后,反馈控制迅速介入,通过及时减小后轴电机力矩来有效抑制车轮空转。后轮越障时,车身俯仰、载荷后移明显,导致后轴电机需克服的行驶阻力增大,轮毂电机驱动系统综合输出力矩峰值为2850 N·m,后轮在0.5 s内成功跨过路障。跨越路障后,电机转速因阻力突降而迅速增加,反馈环节介入使车轮滑转率在1 s内迅速收敛。
3.3 变附有路面急加速的实车道路试验
变附着路面的实车加速试验用来验证真实变附着路面下的控制策略鲁棒性。试验路面分别为水泥路到湿滑路的对接路面、洒水玄武岩路面(左侧)和水泥路面(右侧)的对开路面。
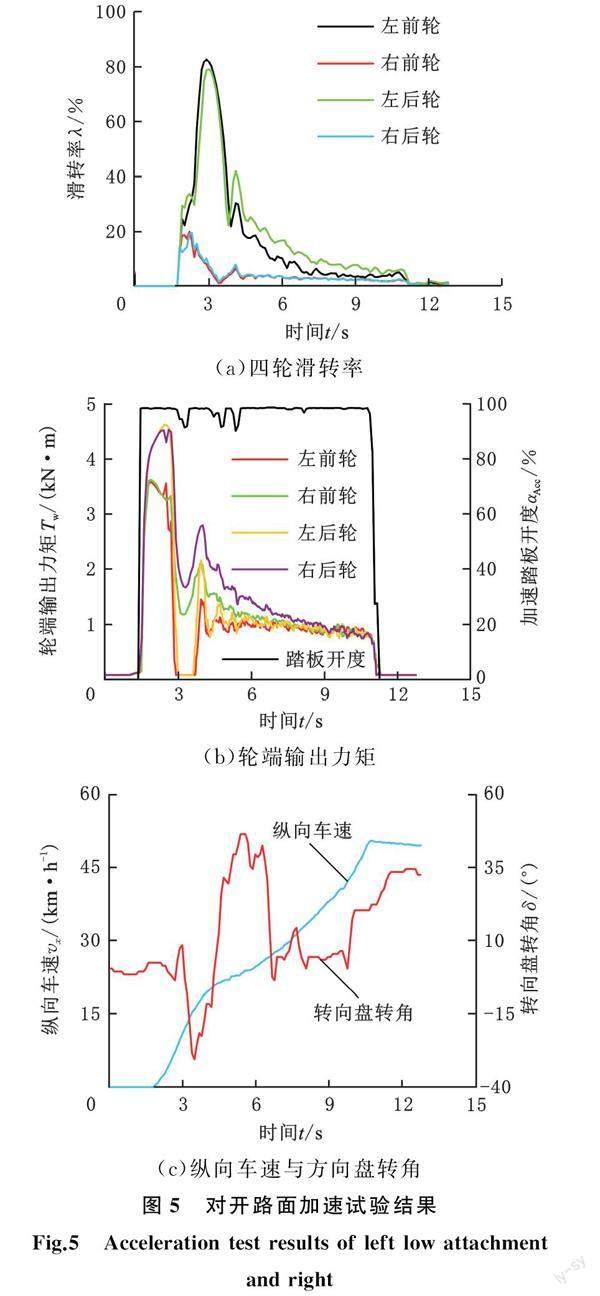
图5表明在力矩矢量分配策略的控制下,左侧低附着车轮轮端输出力矩Tw_FL、Tw_RL在3 s内迅速下降至100 N·m,滑转率λFL、λRL在1.5 s内收敛到20%,轮端输出力矩Tw_FL、Tw_RL在滑转率收敛后迅速增大,有效提高了车辆的加速性能;横向稳定性方面,虽然在加速前段发生幅度较大的横摆运动,导致驾驶员需快速转动转向盘来修正行驶轨迹,但力矩矢量分配策略对各轮实时的差扭控制增大了各轮的稳定裕度,驾驶员控制转向盘转角峰值始终小于47°,处于可控范围内。
如图6所示,滑转率λi随轮端输出力矩的增大而增大,在3.6 s时达到峰值的16%,且没有出现显著发散。此后,前轮和后轮分别于4.5 s、5.6 s驶入低附路面,滑转率迅速增大,前后轮的附着系数估计值迅速减小。前馈-反馈闭环控制策略使前后轮的滑转率分别在5.5 s和6.0 s时开始收敛,驱动防滑响应的延时小于0.5 s。6 s后,控制策略以增大各轮附着利用率为优化目标,使Twi≈rwFxmaxi,加速度均值a-超过0.2g,平均驱动功率利用率超过80%,转向盘转角|δ|max始终小于50°,实现了动力性与稳定性的协调优化。
3.4 越野地形实车道路试验
長纵坡实车试验的坡道路面附着系数为0.8,长度为20 m,坡度为60%。车辆在上坡时重心会后移,前馈环节基于各轮附着极限实时调整各轮毂电机的输出,以优化各轮的附着利用率,如图7a所示。如图7b所示,各轮滑转率的峰值均小于20%,前馈环节可实现四轮附着利用率的协调优化,4个车轮的稳定裕度较高,与前文仿真结果相符,满足低速通过60%坡道的动力性指标。
扭曲路道路试验路长7 m、直线段长3 m、上坡角度12°、最大垂直高度400 mm,测试过程符合GB/T 12541—90。
如图8a所示,路面高度落差显著,车轮因对角线悬架弹簧拉伸至极限而出现腾空现象,左前轮、右后轮的轮速与右前轮、左后轮的轮速交替发散。如图8b所示,越野工况辨识策略快速识别到腾空车轮,腾空车轮附着力利用率突降至0,有效限制了轮端输出力矩。由图8c可知,基于车轮附着力利用率的瞬态变化及各轮附着极限的精确估计,前馈环节可实时调整轮端输出力矩,以克服较大的行驶阻力,反馈环节可使腾空车轮滑转率迅速收敛。
4 结论
(1)依托轮毂电机转速、力矩实时可观的条件,基于LuGre轮胎模型构建了观测空间方程,以实时估计轮胎摩擦力并快速识别车轮附着条件的瞬态变化。
(2)定量分析了车轮附着的影响因素,并基于LuGre轮胎模型、车辆动力学模型、轮毂电机与阻力观测器构建了车轮附着极限动态估计器。针对表征路面激励特征的状态参数,设计了隶属度函数。基于模糊识别,将实时工况与6种越野工况映射,而后根据工况辨识结果设计前馈-反馈闭环控制策略来自适应调节轮毂电机的实时输出力矩。
(3)仿真测试和实车试验表明,基于越野工况辨识的驱动力控制策略可快速跟踪各轮附着极限和接地状态的瞬态变化,自适应调节车辆实时驱动功率,优化了车轮的驱动功率利用率,实现了不同工况下车轮滑转率的快速收敛,达到了车辆机动性与稳定性的综合优化。
参考文献:
[1]秦也辰. 基于路面识别的车辆半主动悬架控制研究[D]. 北京:北京理工大学, 2016.
QIN Yechen. Research on Vehicle Semi-active Suspension System Based on Road Estimation[D]. Beijing:Beijing Institute of Technology, 2016.
[2]HAN Y, MENG G W, HUANG C S, et al. Applied Technology in Road Identification Study of Off-Road Vehicle[J]. Advanced Materials Research, 2014, 1022:169-181.
[3]赵永坡, 谢善亮, 李康, 等. 全地形沙地策略提升车辆通过性能的试验研究[J]. 工程与试验, 2016, 56(2):27-30.
ZHAO Yongpo, XIE Shanliang, LI Kang, et al. Experimental Research on All-terrain Sand Strategy Used to Improve Vehicle Driving Ability[J]. Engineering and Test, 2016, 56(2):27-30.
[4]URAULIS V, SURBLYS V, ABANOVICˇ E. Technological Measures of Forefront Road Identification for Vehicle Comfort and Safety Improvement[J]. Transport, 2019, 34(3):363-372.
[5]王健伟. 轮毂驱动电动客车的驱动力控制方法研究[D]. 重庆:重庆大学, 2017.
WANG Jianwei. Research on Driving Force Control Method of Wheel Drive Electric Bus[D]. Chongqing:Chongqing University, 2017.
[6]DA W, BO W. Research on Driving Force Optimal Distribution and Fuzzy Decision Control System for a Dual-motor Electric Vehicle[C]∥Chinese Control Conference. Huangzhou, 2015:8146-8153.
[7]赵庆薛. 四轮驱动电动汽车驱动力分配与防滑控制研究[D]. 长春:吉林大学, 2018.
ZHAO Qingxue. Research on Driving Force Distribution and Anti-slip Control of Four-wheel Drive Electric Vehicle[D]. Changchun:Jilin University, 2018.
[8]陶虹君. 双电机四轮驱动电动汽车驱动力控制研究[D]. 重庆:重庆大学, 2017.
TAO Hongjun. Study on Traction Control of Front and Rear Wheel Independent Drive Type Electric Vehicle[D]. Chongqing:Chongqing University, 2017.
[9]王发继. 基于轮毂电机驱动的多轮独立驱动驱动力控制研究[D]. 长春:吉林大学, 2017.
WANG Faji. Study on Driving Force Control Strategy for Electric Car Driven by In-wheel Motors Independently[D]. Changchun:Jilin University, 2017.
(编辑 张 洋 )
作者简介:
付 翔,女,1973年生,副教授。研究方向为新能源汽车整车控制技术、动力系统。发表论文23篇。E-mail:759263695@qq.com。
收稿日期:2022-05-16