
基于换道意图识别的高速公路换道驾驶行为预测研究
2023-11-27 07:37:58薛森
中国新技术新产品 2023年20期
薛 森
(北京市首都公路发展集团有限公司八达岭高速公路管理分公司,北京 100101)
换道驾驶行为受许多因素的影响,且驾驶员的换道驾驶行为具有不确定性[1]。因此,准确预测驾驶员的换道行为对交通管理和智能驾驶系统具有重要意义。该研究在说明高速公路换道意图等基本概念的基础上进行数据处理,并提出换道意图识别模型,对高速公路换道驾驶行为进行预测。为验证模型预测结果精准性,对模型进行试验,为更准确地预测驾驶行为,保障高速公路交通安全提供借鉴。
1 基本概念框架
高速公路换道意图是指驾驶员在行驶过程中决定改变当前车道的意图,通常是为了超越前方车辆、避让障碍物或准备将要离开当前道路[2]。换道场景指适合进行换道操作的具体情境,包括超车、高速公路出口、道路障碍物或紧急情况、路口转弯。为了构建车辆换道意图识别模型,该文给出不同特征车辆的定义,具体内容如下:第一,主车(Ego Vehicle)。主车是指在某一处交叉口或路段上具有优先权的车辆。通常根据交通信号、交通规则以及道路标志等交通管理规定进行主车确定。主车享有特定交通流通的优先权,其他车辆需要遵守相应规则并使主车让行。在车辆换道意图识别中,主车是指关注的目标车辆,即需要判断其是否有意进行换道操作的车辆。通过准确识别和分析主车的行为特征以及周围车辆的状态,可以更好地理解主车的意图,为交通管理和其他车辆的决策提供参考依据。第二,周围车辆(Surrounding Vehicles)。周围车辆指的是在驾驶者当前位置附近行驶或停放的其他车辆,包括同车道的前方、后方以及相邻车道上的车辆。在道路交通中,周围车辆的动态变化和互动会直接影响驾驶者的行驶策略和判断。例如在变道操作的过程中,驾驶者需要注意观察同车道和相邻车道上的车辆,保障换道安全并避免碰撞。通过有效监测和识别周围车辆的位置、速度、加速度以及其他驾驶行为,可以提高驾驶者对道路交通环境的感知能力,增强驾驶安全性和减少事故风险。第三,目标车辆(Target Vehicle)。目标车辆是指在某个时刻周围的主车所关注的特定车辆,该车辆可以是主车周围的任意车辆。在特定情境下,主车可能会将某辆车辆视为目标车辆,并将其作为重点观察对象和考虑因素。在车辆换道意图识别中,目标车辆的确定对准确判断主车的意图非常重要。通过综合考虑目标车辆的位置、动态行为以及与主车的交互情况,可以更精确地预测目标车辆是否有意进行换道操作,从而提高驾驶者的安全性和路面交通流畅度。第四,邻域车辆(Neighboring Vehicles)。邻域车辆指在某个特定区域附近行驶的其他车辆。这些车辆可能包括与您同一条道路上的车辆、停在附近的车辆或者在您周围行驶的车辆。邻域车辆的数量和类型取决于驾驶车辆所处的位置和交通情况。
2 数据处理
2.1 数据预处理
为准确、实时地识别车辆的换道意图,通常需要在车辆行驶过程中采集包括关键特征信息的数据集合,例如车辆速度、车辆与周围其他车辆的相对关系等。为保证数据的完整性,需要对数据单位进行标准化处理,并根据公式(1)~公式(4)计算车辆横向速度vx、相对横向距离Δxi、相对纵向距离Δyi、目标车辆与邻域车辆相对速度Δvyi。
式中:vi为邻域车辆的纵向速度;x为目标车辆横向坐标;y为目标车辆的纵向坐标。
2.2 换道意图阶段标记
为准确识别车辆的换道意图,需要先对数据集进行标记。由于在数据集中,没有可以直接表示车辆换道意图的值,因此在换道意图阶段(如图1所示),目标车辆用黑色、白色小车表示,邻域车辆用灰色小车表示,换道意图阶段由曲线AC表示,左换道标记为1,右换道标记为2,车道保持标记为0,以便于后续换道意图识别工作。
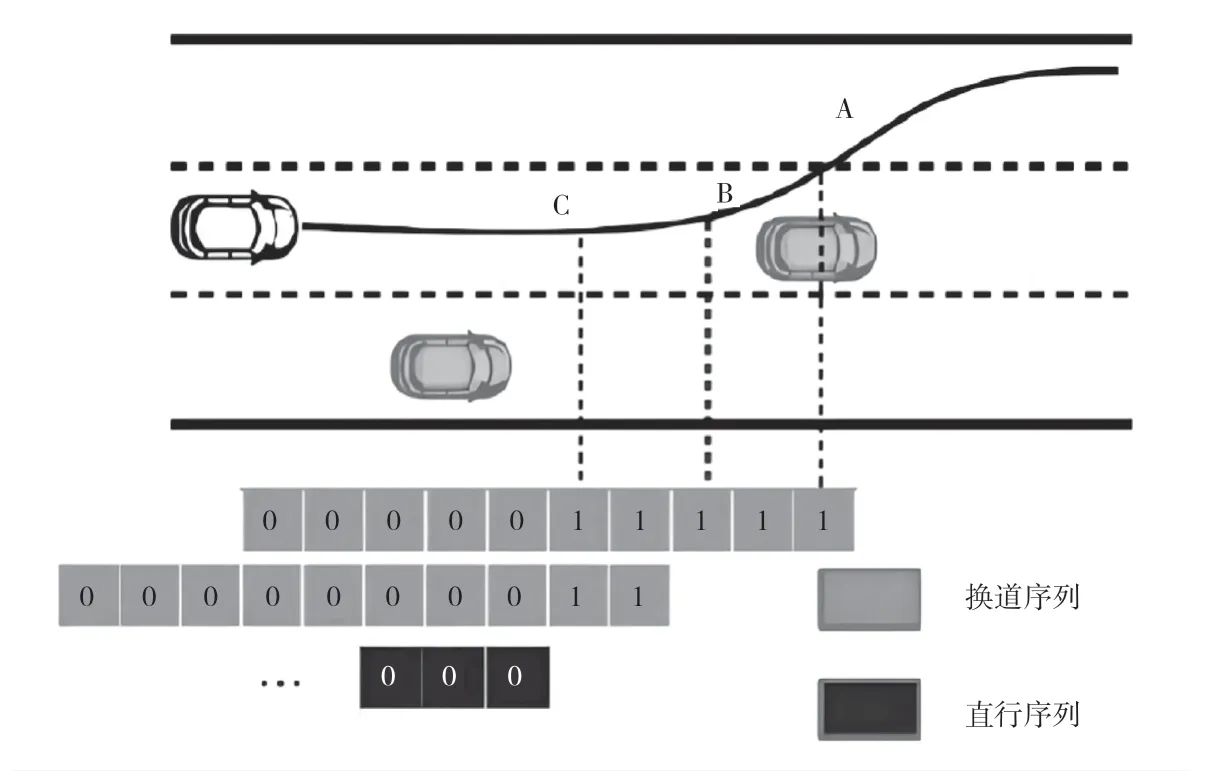
图1 换道意图阶段标记图(轨迹序列)
2.3 数据提取
基于上述场景,该文对完成预处理的数据进行特征信息提取。该文仅研究单次换道行为,不考虑多次换道行为。所以要求提取的轨迹片段在换道前15秒和换道后10秒的时间范围内始终保持在相应的固定车道上[3]。换道点被定义为车辆轨迹与车道线的交点,以确保单次换道行为特征提取工作高质量进行[4]。在实际操作中,输入以下7种数据:1)目标车辆的横向速度、纵向速度、纵向加速度。2)邻域车辆横向速度、纵向速度。3)目标车辆与邻域车辆的相对横向距离、相对纵向距离[5]。4)目标车辆与邻域车辆的相对纵向速度。5)目标车辆所在的车道。6)大型车辆位于目标车辆的方向(没有大型车辆为0;有大型车辆,则大型车辆在哪些方向上就标注在哪)。7)目标车辆的换道意图标签。
3 换道意图识别模型
BiLSTM-F(Bi-directional Long Short-Term Memory,双向长短期记忆)模型通过双向LSTM(Long Short-Term Memory,长短期记忆)层,能够同时捕捉序列数据前后的上下文信息,从而更全面地理解序列中的关系和模式。而通过引入注意力机制,模型可以自适应地将注意力集中于对任务具有重要影响的部分,提高了模型对关键特征的关注程度[6],所以该文选择应用BiLSTM-F模型进行后续的研究,以期取得更好的研究结果。BiLSTM-F模型的输入序列为公式(5)和公式(6)。
式中:label为车辆意图阶段标记;vx为目标车辆的横向速度;vy为目标车辆的纵向速度;vacc为目标车辆的纵向加速度;bci为大型车辆位于目标车辆的方向;vix为邻域车辆横向速度;laneid为目标车辆所在的车道;vi为邻域车辆的纵向速度;Δdi为目标车辆与邻域车辆的相对纵向距离;Δxi为目标车辆与邻域车辆的相对横向距离;Δvyi为目标车辆与邻域车辆的相对纵向速度。
BiLSTM-F模型由前向LSTM、后向LSTM构成,所以在输入信息后,前向LSTM的神经网络层与后向的LSTM神经网络层会进行结合,并呈现当前时刻的隐藏状态[7]。同时,LSTM中的遗忘门ft决定了上一时刻的细胞状态ct-1中有多少信息能够保留到当前时刻的细胞状态ct;LSTM中的输入门决定了当前时刻有多少的输入信息xt可以保留到当前时刻的细胞状态;LSTM中的输出门决定当前时刻的细胞状态中有多少信息能够输出到隐藏状态ht中。LSTM如公式(7)~公式(9)所示。
式中:it是定义输入门;ft是定义遗忘门;ot是定义输出门;Wxi、Whi、Wxf、Whf、Wx0、Wh0分别为权重参数;bi、bf、b0分别为偏置参数。
将模型中的各个时刻输出的数据信息进行权重分配,该文采用加权平均法[8],计算当前时刻的总权重因子ATt,如公式(10)所示。
式中:ati为归一化处理后得到的权重;ai为时刻i隐藏层的状态信息。
结合驾驶人员的换道情况分析发现,其换道意图有明显的前后依赖性[9]。该文通过建立车辆行驶轨迹数据集合的方式,计算意图转移矩阵,如公式(11)所示。
式中:Ot为输入序列;yt为轨迹序列标记;Ot、yt均为随机变量序列。
基于上述分析,引入观测序列X,建立最优状态输出序列Y公式,如公式(12)所示。
根据公式(12)可知,t时刻换道意图为Yt。
4 试验与结果分析
4.1 数据集
为验证模型精准性,该文收集了某公路管理局提供的数据集中101车道轨迹数据进行分析。标签为0的个数为58475;标签为1的个数为38990;标签为2的个数为15325。为保证识别结果分析具有精准性,选取7:55—8:40时段内的数据集进行验证。
4.2 换道行为识别结果
识别结果如图2所示。车辆轨迹数据每隔0.1s进行采样。当距离换道点1.9s时,可以预测目标车辆有向左换道的意图。
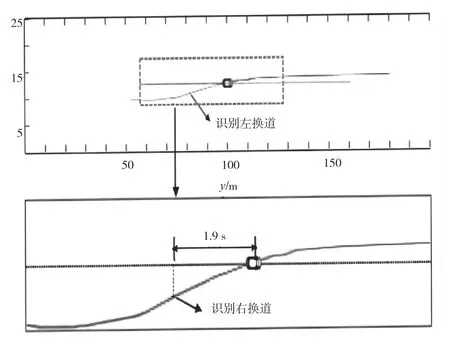
图2 场景图
为进一步分析结果,将目标车道换道点提前5s,并应用该时刻的数据进行计算,得到的预测时刻的车辆状态数据见表1。
由表1分析可知,正后方车辆、右后方车辆的相对速度较慢;右后方车辆与目标车辆的纵向相对距离较劲;在50m后,右后方车辆加速行驶。因为车辆速度相差的数值较小,所以车辆的密度较大,且右后方的车辆正加速行驶,为提升驾驶的安全性,目标车辆的驾驶员出现了左换道意图。
针对换道选择行为识别,该文选择07:55—08:10、08:10—08:25、08:25—08:40 3个时间段的数据集进行计算。为提升计算针对性,选择07:55—08:10这一时间段的数据集,进行换道选择情况分析,结果见表2。
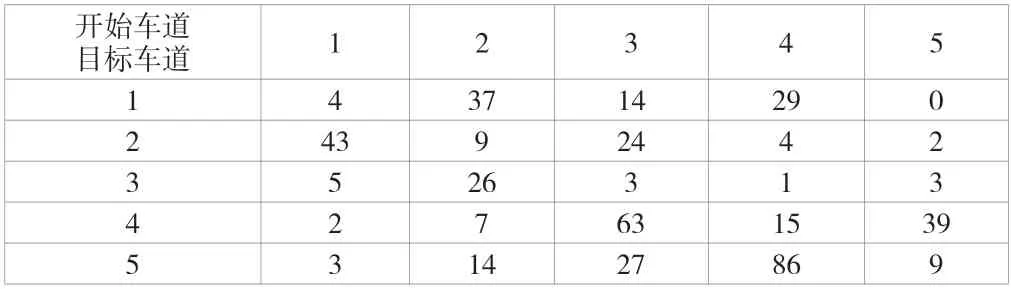
表2 7:55—8:10车辆换道选择
表2结果显示,该时段共有468辆车进行换道,每个车道上分别有57、93、131、135、53辆车经过一次或多次换道。
车道平均速度结果见表3。

表3 车道平均速度(单位:m/s)
由表3数据分析可知,07:55—08:10时段内,1号车道的平均速度较小,另外4个车道的平均速度较高,通过表2数据分析可知,07:55—08:10时段内,1号车道的平均速度较小,另外,4个车道的平均速度较高,所以结合表2数据计算,预测该时段内车辆换道的概率超过85%。由于08:10—08:25、08:25—08:40两个时段为车辆高峰期,且车辆的平均速度相近,因此基于驾驶安全性考虑,车辆换道的概率与07:55—08:10时段相比较低。
基于此,该研究对所提出的模型各时间节点车辆左右换道预测精准性进行对比,结果如图3所示。
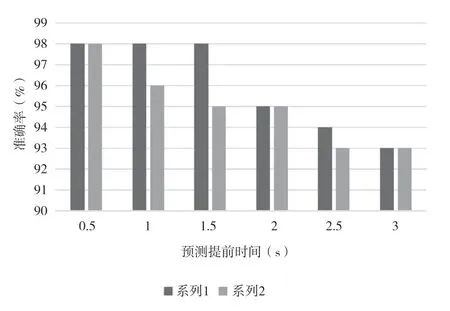
图3 左右换道预测结果
由图3分析可知,该文提出的模型提前0.5s预测结果精准性为98%;提前2s以上的预测结果精准性为93%以上,精准率较高,具有良好的应用前景与价值。
5 结论
该文提出基于换道意图识别模型,对高速公路换道驾驶行为进行预测。该模型中,引入BiLSTM、观测序列。通过真实数据集的计算验证,结果表明,该文提出的模型能够有效预测出高速公路车辆换道意图。尤其是在0.5s内,预测结果精准性为98%;0.5s~3s的预测结果精准性为93%以上。这一结果证明该文所提出的模型具有良好的泛化能力和较高的识别精准率。
猜你喜欢
法律方法(2022年2期)2022-10-20 06:42:20
福建基础教育研究(2022年4期)2022-05-16 08:48:40
汽车与驾驶维修(维修版)(2021年11期)2021-12-01 01:12:34
汽车与驾驶维修(维修版)(2021年11期)2021-11-24 13:03:45
法律方法(2021年3期)2021-03-16 05:56:58
吉林大学学报(理学版)(2020年3期)2020-05-29 06:32:16
自动化学报(2018年7期)2018-08-20 02:59:04
时代汽车(2018年4期)2018-05-31 02:53:08
山东青年(2017年7期)2018-01-11 16:09:15
周口师范学院学报(2016年5期)2016-10-17 06:36:47
