
天津市大神堂海洋牧场海域人工鱼礁区声学初步调查
2023-11-27 15:08房恩军王宏曾祥茜王宇徐晓甫张雪
天津农业科学 2023年10期
房恩军,王宏,曾祥茜,王宇,徐晓甫,张雪
(1.天津市水产研究所,天津 300457;2.天津市海洋牧场工程技术中心,天津 300457)
人工鱼礁的建造和投放,是当前我国海洋牧场建设的主要工作之一[1]。人工鱼礁是海洋牧场建设的基础生态工程[2],是海洋牧场生境构建和修复的重要内容。投放的人工鱼礁,形成了新的流场,为水产生物提供了良好的栖息和繁育场所[3],从而提高了渔业资源的产量和质量,增加了生物多样性,修复了海域生态环境。人工鱼礁的建设是一个复杂的系统工程,不仅受海域功能区划、海域底质、地貌、水流、风浪等诸多因素的限制和影响,而且与鱼礁的沉陷、稳定性和使用寿命等密切相关。2009 年起天津市正式启动了天津市滨海新区大神堂海洋牧场的建设,累计投放了不同规格的钢筋混凝土礁体29 348个,共计10.88×104m3·空。天津渤海湾海域多为粉砂淤泥质海底,人工鱼礁礁体投放后可能会发生位移和淤积沉降,需要对海洋牧场人工鱼礁的空间分布现状进行调查和评估,对人工鱼礁礁体水平位移和淤积沉降状况进行监测和预警[4-9]。
传统的人工鱼礁调查方法主要通过潜水员水下摄像和人工探摸,由于调查海域水体的能见度、人员安全与成本等因素,传统调查方法具有耗时长、成本高、效率低、难以对大规模的人工鱼礁形成宏观监测等缺点[10-13]。相较于传统调查方法,潜海调查方法,可以在水体能见度低的海域,利用声学探测手段如侧扫声呐、识别声呐和多波束测深系统等对人工鱼礁投放位置及其渔业资源增殖效果进行评价,结果更为科学和精准。国内外已经利用侧扫声呐在人工鱼礁研究领域开展了一系列研究。Li 等[14]利用侧扫声呐对其进行分类,对人工鱼礁水域底质特征进行监测;沈蔚等[15]应用侧扫声呐系统进行人工鱼礁建设区域海底底质分类,对建设过程中的鱼礁状态进行了评估;刘永虎等[16]应用侧扫声呐系统估算石料人工鱼礁堆的体积;佟飞等[17]利用侧扫声呐技术提取礁高、沉降率与礁体布局等参数,评估人工鱼礁工程质量。为了掌握人工鱼礁区已投放鱼礁的现状,了解鱼礁在海底的位置和姿态信息,利用侧扫声呐、智能无人船、多波束测深、水下机器人(ROV)、差分GPS 信标机空间定位和GIS 软件数字化相结合的声学方案,开展了天津市大神堂海洋牧场人工鱼礁区声学研究。利用声学设备采集鱼礁投放区数据,解决了常规设备无法在水下对人工鱼礁进行大面积监测的难题,首次在天津大神堂海洋牧场海域获得了人工鱼礁的空间分布细节信息,摸清了人工鱼礁区域内鱼礁状况,评估验证了海洋牧场修复海域生态环境、恢复渔业资源的效果,为海洋牧场前期投放成果检验和后期规划建设提供参考依据。
1 材料与方法
1.1 调查站位和时间
本研究选择天津市滨海新区汉沽海域的大神堂海洋牧场为研究对象,地理范围位于39°05′03″N~39°08′01″N,117°57′00″E~118°00′45″E,总面积2 360 hm2,平均水深5 m,牧场区鱼虾蟹贝藻丰富,生态修护和资源养护效果明显,为典型的牡蛎礁型海洋牧场。本研究于2021 年9 月18 日正式开始外业测量工作。侧扫声呐的测线设计为南北朝向,布设测线间距为25 m,测线数量共86 条,平均长度3 392 m(图1、图2)。外业总共耗时29 d,数据处理耗时40 d,完成测线长度约292 km,实际测量面积约778 hm2(图3)。

图1 声学测区位置示意图

图2 声学测线布设示意图

图3 声学测量航迹线图
1.2 调查分析方法
按照交通运输部颁布的JT/T790—2010《多波束测深系统测量技术要求》和JTS 131—2012《水运工程测量规范》,利用侧扫声呐、多波束测深、水下机器人(ROV)、智能无人船、差分GPS 信标机空间定位和GIS 软件数字化相结合的人工鱼礁现状声学调查方法,开展了天津市大神堂海洋牧场人工鱼礁区声学调查。使用实时三维成像声呐系统、多波束扫测系统对海洋牧场区域投放的人工鱼礁进行勘察,采集人工鱼礁声学图像,获得人工鱼礁的空间分布细节信息,评估海洋牧场建设效果。

表1 采用的主要仪器设备
1.3 数据处理方法
1.3.1 水位数据处理 本次调查设置的海上验潮站距离岸边水位站约6 km,两地潮时、潮差变化相近,评估两地潮位性质基本一致。假设同一时刻岸边潮位为h1,海上潮位为h2,则可以得到岸边到海上的基准传递参数Δh=h2-h1。岸边潮位站和海上验潮站每10 min 有1 组同步潮位观测数据,通过多组同步数据计算Δh,得到其均方差。对多个Δh 取平均值,最终得到海上验潮数据转换到1985 国家高程基准下的潮位数据,用作多波束水深测量数据的水位改正。
1.3.2 多波束数据处理 多波束数据处理采用Caris 多波束处理软件。采用HIPS to ASCII 方式选择测线,导出该测线上所有的点云数据。采用BASE Surface To ASCII 方式导出测区内的水深数据,借助Hypack 软件抽稀为10 m 网格的点云数据。采用CUBE 算法生成1 m 分辨率的Base 曲面数据。由于测区范围较大,采用300×300 m 网格将测区分为88 个区域,采用0.1 m 分辨率构建Base 曲面,并采用BASE Surface To Image 方式导出测区的图像,便于清晰地观测鱼礁分布情况以及海床的状况。
2 结果与分析
2.1 海洋牧场声学图像
采用多波束测深仪对鱼礁投放区域进行全覆盖扫测,根据多波束测量数据采用BASE Surface To Image 方式导出测区数据(图4),按照1∶1 000 绘制水深图,获得了天津大神堂海洋牧场人工鱼礁区的侧扫声呐和多波束声学图像。调查结果显示,声学扫测区水深在5.2~7.0 m。由图4-B 可以看出,监测海域水深整体呈现出从北至南逐渐变深的趋势。由于人工鱼礁高于海底,在水深伪彩图上表现为与周围海底颜色不同,图4-B 中存在颜色明显与周围海底不一致的目标,对照水深图例可以看出,目标深度比海底浅,目标即为本次监测的人工鱼礁。

图4 天津大神堂海洋牧场人工鱼礁声学扫测图像
2.2 典型鱼礁扫测图像
利用USE 软件的PatchTest 模块,对设备的安装偏移参数进行校准,并将安装偏移参数的校准值输入软件。利用Replay 模块,对数据进行回放,选择有特征的鱼礁图像,调整图像渲染方式、数据滤波方式,获取较好的图像,即实时三维成像声呐成果导出后如图5 所示。从图5 可以看出,人工鱼礁表面极不规则,存在凹凸变化,鱼礁投放后,表面生长有形状不规则的附着物。

图5 天津大神堂海洋牧场典型鱼礁声学扫测图像
2.3 海床的声学图像特征
为了更加清晰地查看测区内鱼礁的分布情况,采用300 m×300 m 网格将测区分为88 个区域,对各区域进行编号(图6)。

图6 天津大神堂海洋牧场人工鱼礁声学调查成果总图
图7 为天津大神堂海洋牧场声学成果总图8-4 区域局部细节图,其中红色矩形部分是2018 年投放的人工鱼礁,黑色多边形部分是2010 年投放的人工鱼礁。从图7 可以看出,2018 年投放的人工鱼礁周边地形未有显著变化,而2010 年投放礁体周边的地形有明显提升,且提升程度与礁体距离紧密相关。由此可以看出,人工鱼礁的投放对海床的演变有巨大的促进作用(图8)。
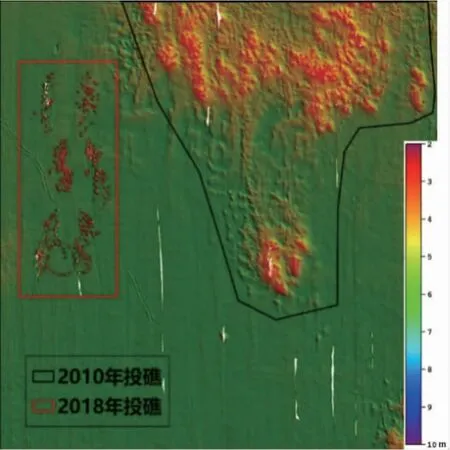
图7 多波束8-4 区域局部细节图

图8 天津大神堂海洋牧场海床类型分布
2.4 鱼礁增殖效果声学图像特征
实时三维成像声呐成果导出后如图9 所示。从图9 可以看出,鱼礁表面极为不规则,存在凹凸变化。由于调查海域海水透明度较低,通过水下摄像监测鱼礁投放后效果较为困难,为了进一步验证三维成像声呐成果,本研究通过精确的GPS 定位,采用海上原位吊礁对比三维成像的方法,验证了声呐图像中鱼礁表面有形状不规则的附着物,确认为礁体附着生物(图10),主要包括环节动物、节肢动物、脊索动物、腔肠动物、棘皮动物、软体动物等,其中牡蛎是礁体附着生物的主要优势种。因此,高精度的侧扫声呐图像数据可用于人工鱼礁对牡蛎增殖等效果的研究。
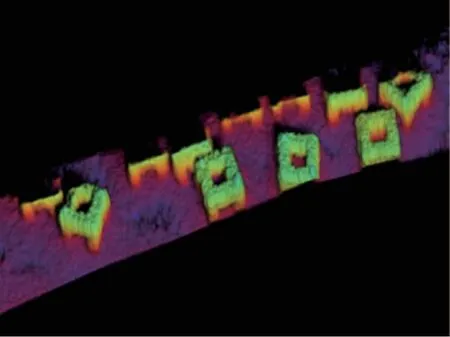
图9 实时三维成像声呐扫测鱼礁效果图

图10 海上原位吊起的鱼礁
3 讨论与结论
3.1 人工鱼礁空间分布的研究
人工鱼礁是一种设置在水中的人工构筑物,能够为鱼类等水生生物的栖息、生长和繁殖提供必要和安全的场所,达到保护和增殖渔业资源、修复生态环境的目的。以往在海洋牧场建设中,使用常规设备无法获得牧场整个区域人工鱼礁投放后的准确位置、姿态等空间分布信息。采用侧扫声呐、多波束测深等声学方法,可以对人工鱼礁建设进行准确有效监测,解决了常规设备无法在水下对人工鱼礁进行监测的难题。根据多波束导出的点云数据,对高程进行渲染得到点云高程渲染,结果显示,人工鱼礁的轮廓比较清晰,与投放的鱼礁形态一致,礁体结构完整,测区内鱼礁形态各异,分布在多个片区,各片区内有相对集中摆放的,也有散落分布的,有叠放现象。根据提取的图像结果显示,实际礁体分布与设计布局有一定的偏差。
通过对侧扫声呐图像的解译,获得了天津大神堂海洋牧场人工鱼礁的空间分布细节信息,确认了研究区域中人工鱼礁的具体位置,并对其进行了精确的GPS 定位。从人工鱼礁的空间分布可以得出,天津大神堂海洋牧场人工鱼礁的分布比较密集,保存现状较好,大多数礁体呈现竖置状态,位于海床表面以上。本研究明确了天津大神堂海洋牧场人工鱼礁全部位于海洋牧场既定范围之内,未发生迁移。本次声学调查结果清晰、准确,图像清晰,与同类研究相比[13-18],整体准确率为98%。
3.2 验证海洋牧场对牡蛎礁的修复作用
多波束测深系统等声学设备工作原理是通过计算回波速度来记录海底的地形起伏信息,获得采样点位的高精度的位置和深度信息,为实现海床类型识别提供翔实的数据支持。多波束水深数据能够客观反映海底的三维几何结构,海底几何特征又与海床类型密切相关,对水深数据的特征值进行提取,可以用于海床分类[19]。
在渤海湾近海海洋牧场内,牡蛎是礁体附着生物优势种。天津大神堂海洋牧场紧邻天津大神堂活体牡蛎礁国家级海洋特别保护区,附近海域存活有现代活体牡蛎礁[20-21]。96%以上的牡蛎幼虫在繁殖期将脱离初始礁体,随海流迁移至周边海域。人工鱼礁是良好的牡蛎幼虫附着基,可为牡蛎的生长发育提供适宜生境。每年牡蛎繁殖季节,受潮汐流场的影响,大量牡蛎幼虫由活体牡蛎礁保护区迁移至海洋牧场海域,附着于人工礁体之上,使天津大神堂海洋牧场中牡蛎大量增殖。牡蛎叠加生长的特性,使海洋牧场的海床出现明显的起伏和褶皱,可以通过高精度的声学数据进行识别。本研究依据声学调查获得高精度的声呐图像数据用于人工鱼礁对牡蛎增殖效果的时空分布特性研究。结果发现,天津大神堂海洋牧场海域有60.54 hm2海床已转变为牡蛎海床或牡蛎泥混海床,也就是说在天津大神堂海洋牧场形成了60.54 hm2新牡蛎礁。为了检验声学研究结果,本研究采取海上原位吊礁、底拖网、水下机器人(ROV)原位采集海底泥样、潜水影像、人工探摸等调查手段,确认声学调查发现的牡蛎海床为活体牡蛎礁,验证了多波束等声学技术对牡蛎覆盖海床的识别研究结果准确有效,证实了人工鱼礁建设对牡蛎礁的修复作用。研究结果为浅滩淤泥质海域海洋牧场贝类资源量的定量评估和牡蛎礁演化变迁研究提供了基础数据,为全面科学准确有效评估人工鱼礁建设效果提供了解决方案。
3.3 水下机器人(ROV)在海洋牧场监测中应用
本研究首次在天津市海洋牧场监测中使用水下机器人(ROV),并获得成功。水下机器人(ROV)可以进行定点和区域性走航式观测,通过搭载的多参数环境监测仪等设备,对水体进行剖面或断面连续观测,突破水体对遥感观测手段的限制,获得高分辨率的海洋环境观测数据,为海洋牧场的建设布局提供技术支持。配备了机械手臂和可视化系统的水下机器人(ROV)由相关人员遥控,远程精准采集礁体及海床上的原位样品,实现了生物多类样品的精确获取和保真回收,较好地响应海洋牧场特殊生境的探测需求,在海洋牧场立体监测体系中发挥了重要的协同作用,提高了工作效率,降低了成本,保护了海洋牧场的原生态,经济性、生态性和科学性达到高度统一。搭载光学摄像头和三维声纳在一定区域内对牡蛎礁的形态、附着物、淤积沉降、生物生长等状况进行近距离、高分辨率的原位观察和遥测,获取牡蛎礁体、海洋生物、海床底质等目标对象的高清实景图像,为海洋牧场的碳汇能力评估和提升提供科学有效的数据。
现代化海洋牧场的建设是一个系统工程,涉及到海洋生态学、动物行为学、海洋工程学、信息技术学等多学科的交叉应用[1],全面科学准确有效评估人工鱼礁建设效果存在一定的技术难题。本研究探索了利用侧扫声呐、多波束测深、水下机器人(ROV)、差分GPS 信标机空间定位和GIS 软件数字化相结合的声学技术在海洋牧场建设研究中的重要作用,并取得了初步成果,是监测评估浅滩淤泥质海域海洋牧场建设效果的有效方法之一,为全面科学准确有效评估人工鱼礁建设效果提供了解决方案。此项基于侧扫声呐和多波束测深等综合声学技术方案通过对声呐图像声图结构分析以及成像进行特征提取,结合数字图像处理的方法实现了对海域中人工鱼礁、海床具有非常好的识别能力,对鱼礁稳定性、礁体沉降等投放情况可以进行精准评估,对海床分类研究结果准确有效,对人工鱼礁投放位置及其生态修复效果进行评价更科学。
本研究解决了在浅滩淤泥质海域水体能见度低,难以开展大规模的人工鱼礁精准监测的难题,可为海洋牧场人工鱼礁建设的规划、方案制定、建设过程和建设结果进行科学准确有效的评估,保障海洋牧场建设的科学实施和管理。
猜你喜欢
海洋通报(2022年5期)2022-11-30
水运工程(2022年3期)2022-03-25
渔业现代化(2021年1期)2021-03-09
海洋通报(2020年5期)2021-01-14
海洋信息技术与应用(2020年3期)2020-08-24
小学科学(学生版)(2019年10期)2019-11-16
渔业研究(2019年2期)2019-04-25
海洋石油(2017年1期)2017-03-29
中国海洋大学学报(自然科学版)(2015年8期)2015-03-18
声学技术(2014年1期)2014-06-21
