结合激光雷达和三维性状分析的田间小麦产量分级研究
2023-11-26 02:49:26施凌天丁国辉夏云鹏葛玉峰周济
南京农业大学学报 2023年6期
施凌天,丁国辉,夏云鹏,葛玉峰,周济,3*
(1.南京农业大学前沿交叉研究院/人工智能学院/作物表型组学交叉研究中心,江苏 南京 210095;2.美国内布拉斯加大学林肯分校工程学院/农业与自然资源研究所,林肯 203 LW,美国;3.英国国立农业植物研究所/剑桥作物研究中心,剑桥 CB3 0LE,英国)
小麦是世界上主要的粮食作物之一,全球约有35%~40%的人口以小麦为主粮,维持其产量对世界粮食安全和经济发展均十分重要[1]。小麦产量是多种产量要素共同作用的结果,可通过关键性状(如穗数、冠层覆盖度和三维叶面积等)表征,且与冠层相关[2]。小麦产量中大部分贡献来自顶部冠层的光合作用[3],冠层表型会对最终产量产生较大影响,因此分析产量与关键产量性状之间的关联对小麦高产育种、栽培和农业生产都具有重要意义。研究与产量相关的性状还可为寻找不同环境条件下导致产量差异的原因提供依据,为选育不同气候下农艺性状更优良的小麦品种,进而为推广高产栽培技术提供精准表型分型技术和大数据支撑[4]。
近年来,随着田间作物表型组研究的不断发展[5],高精度、非破坏性的表型采集技术和图像处理、人工智能分析方法得到广泛应用[6],这些技术方法在揭示植物生长和产量等性状方面发挥了关键作用。例如Bauer等[7]使用载人轻型飞机获取超大规模生菜产区的航空影像,再结合计算机视觉和深度学习分析种植区内生菜冠层的归一化植被指数反射率,以此完成生菜计数和大小分级,进而完成对市场销量(marketable yield)的预测;Fernandez-Gallego等[8]使用手持热像仪获取植株冠层热成像,再采用对比度增强和滤波技术计算麦穗数量,以此对小麦产量进行预测;Khan等[9]结合地面移动平台(mobile ground platform,MGP)和无人机进行RGB(red-green-blue,即红绿蓝可见光)图像采集,分析作物冠层特征,并使用冠层性状解析春小麦在不同施肥处理下的表型差异。以上这些方法基于植物冠层对产量相关性状进行了采集和分析,针对冠层性状和产量表型等进行了有益的尝试。然而,这些方法一般基于二维RGB、多光谱或热辐射图像,无法获取完整且高精度的作物冠层结构信息,因此很难对产量形成(yield formation)时的冠层形态变化进行更进一步的三维结构重现和动态性状分析。
与其他采集方法不同,光探测和测距(light detection and ranging,LiDAR,即激光雷达)具有穿透能力强、扫描范围广、灵活性高及对光线变化敏感性弱等优点,可快速获取对象物体的三维结构和形态特征[10]。根据LiDAR的应用场景,其采集方式可大致分为3种类型:1)能生成高分辨率模型的定点地面激光雷达(terrestrial LiDAR),如Greaves等[11]利用Riegl VZ-400激光雷达采集灌木生物量和叶面积;2)可进行高通量检测的机载激光雷达(airborne LiDAR),如ten Harkel等[12]使用无人机搭载VUX-SYS激光雷达采集马铃薯、甜菜和冬小麦的冠层数据,进而估算生物量和作物高度;3)可灵活获取作物三维形态的移动激光雷达(mobile LiDAR),如Saeys等[13]将LMS 200和LMS 400安装在联合收割机上采集小麦密度和单位体积;Zhu等[14]结合背包式LiDAR和CropQuant-3D软件对不同施氮水平下的小麦三维形态建立了基于氮素利用率的品种分类和鉴选流程。
以上LiDAR设备的使用为田间作物表型采集提供了可靠方法,但在针对冠层三维表型的采集中仍存在各类问题[15]。例如:1)地面激光雷达的数据采集效率较差,在测量占地面积大且地形复杂的田间试验时难以获取所有作物的形态;2)机载激光雷达的精度和兼容性较低,且飞行时产生的气流还会影响作物冠层的形态,造成采集误差;3)移动激光雷达中,手持式LiDAR虽易于携带使用,但构建的三维模型质量较差,很难完成大规模、高质量的田间作物测绘;4)车载LiDAR操作要求和维护成本较高,且较难进入某些地形进行数据采集;5)背包式激光雷达虽然可在一定程度上克服上述限制,能快速灵活地在不同地点获取相对高精度的作物三维形态数据,但现阶段其使用仍停留在单个生育时期的尺度[14]。
对作物三维点云的表型分析算法也是限制田间产量研究的瓶颈之一。例如:Madec等[16]结合激光雷达和无人机对灌溉和水分胁迫条件下的小麦表型进行测量,基于株高对地上部生物量和产量进行预测,但该方法在对密集小区分析时准确性低且单一性状很难全面描述复杂田间环境下的产量变化;Jimenez-Berni等[17]结合SICK LMS 400激光雷达和Phenomobile Lite移动平台采集田间小麦表型数据,并使用三维体素指数(3D voxel index,3DVI)和三维剖面指数(3D profile index,3DPI)估算地上生物量,然而该方法无法解释灌浆期生物量变化,对冠层结构的分析精度较低,并明显低估了地上部作物生物量。值得指出的是,目前作物三维表型分析大都依靠单个性状进行评估,造成了算法对不同生育时期的分析结果偏差大、试验结果重复性低等问题[18]。
针对上述国内外研究中的问题,本研究借鉴了Zhu等[14]通过背包式激光雷达构建田间小麦三维点云和氮素响应性状分析的算法流程,优化后提出了一套通过配准修复错误三维点云分类,再结合半自动性状处理进行多生育时期、冠层性状分析和田间产量分级的算法流程。为验证分析结果,本研究通过人工统计的产量数据和相关性分析对4个冠层形态性状进行验证,并综合分析了影响产量分级的表型特征,为自动化三维性状提取和大规模田间产量分级提供了新思路和解析算法。
1 材料与方法
1.1 田间试验设计
根据人工产量测量结果,以54个中国长江中下游的冬小麦品种(如镇麦系、宁麦系和扬麦系等)为试验材料,开展小麦氮素响应和产量分级评估田间试验,试验在镇江市农业科技创新中心进行。采用裂区试验设计,以3种氮素处理(0、180和270 kg·hm-2)为主区(9个田块),54个小麦品种为副区(即田块中的小区),设置3次重复,共486个小区(图1-a)。氮肥以基肥和拔节肥按照3∶2(质量比)的比例施用,磷肥(P2O5)和钾肥(K2O)均按照120 kg·hm-2作为底肥在播种前一次性施入。小麦播种密度为每公顷240万株基本苗,试验小区长3 m,宽2 m,行间距25 cm。

图1 使用背包式激光雷达对3种施氮水平下的54个小麦品种(3个重复,共约2 916 m2)进行三维点云采集和预处理Fig.1 The 3D crop phenotyping of wheat field experiments using backpack LiDAR together with data pre-processing, which has collected 3D point clouds from 54 wheat varieties(three biological replicates,approximately 2 916 m2) under three levels of nitrogen fertilization treatmentsN0、N180和N270:施氮量为0、180和270 kg·hm-2 Nitrogen application rates of 0,180 and 270 kg·hm-2. 下同 The same as follows.
1.2 表型数据采集
本研究所使用的田间表型采集设备是背包式LiDAR ROBIN(GeoSLAM公司,英国;图1-b)。该设备集成了RIEGK VUX-1 UAV激光雷达和紧凑型惯性导航系统(inertial navigation system),可测量精度为5 mm,田间测量准确度约为10 mm,测量范围为3~1 000 m。田间数据采集的基本流程包括:设备组装和校准,按照预定采集路径以1.5 m·s-1步行进行表型采集(图1-a);按行进计划完成3组路线的测绘(即红、黄、蓝色标注路径,图1-a),再完成路径校准;在田间完成作物测绘数据保存。为防止附近基站干扰LiDAR造成地理坐标偏移,在离试验田较远的固定地点架设RTK(Real-time kinematic)基站。为保证数据质量,采集时分3列行进,对单列田块(即竖向的3个田块,图1-a)以S型路线绕行,平均单列采集时间约10~15 min,对整个田间试验采集耗时为1.5 h左右。在2021—2022年小麦生长季中,对关键生育时期(从拔节到成熟期)的田间小麦分7次采集,分别为4月4日、4月10日、4月18日、4月24日、4月29日、5月9日和5月21日。期间不同小麦品种冠层特征变化和差异均较为明显,符合本研究对冠层性状表型差异的试验要求。
1.3 算法的软件实现和测试
本研究针对三维冠层性状研发了一系列分析算法流程,为提高下文中算法描述和软件实现的可读性和简洁性,本节集中介绍了实现算法使用的开源科学软件开发库。软件实现通过编程语言Python(3.7)在Windows 10计算机上完成。其中,在处理三维点云数据时使用了Laspy(1.7.0)、Whitebox(1.3.0)、GDAL(3.1.4)、Rasterio(1.1.8)和Open3D(0.10.0.1)库;在处理二维图像时使用了scikit-image(0.18.3)和OpenCV-Python(3.4.16.59)库;在对不同数据结构(如数组和栅格)处理时使用了Numpy(1.19.4)、Pandas(1.3.4)和Scipy(1.7.1)库[6]。通过PyCharm集成开发环境(integrated development environment,IDE)完成了源代码编写和结果测试。下文提及的各类函数和数据处理均通过上述科学软件开发库实现。
算法的软件运行与测试由2部分组成:1)田块尺度,对单个田块的点云文件[421~688 MB,共(1.5~2.6)×107个三维空间点]进行小区分割,平均用时18~30 min,占用内存15~16 G;2)小区尺度,对单个田块内54个小区的点云文件[351~586 MB,单个小区(0.01~0.12)×107个三维点]批量进行数据优化和性状分析,平均用时为6~10 min,占用内存150~640 MB。除数据预处理和小区点云分割部分需人工选择相应的解决方案,其余流程均可自动化完成。
1.4 数据预处理流程
表型数据采集完成后,通过激光雷达ROBIN的配套处理软件(即MMPrcoess、AEROoffice和grafNav)进行数据预处理(图1-b)。表型数据包括优化采集时的路径数据,去除信号断点和干扰数据,配合RTK获取的精确校准地理坐标信息的全球导航卫星系统(global navigation satellite system,GNSS)数据,将生成的初始三维点云数据保存为.las文件类型(图1-c上部)。然后,使用TerraSolid系列软件中的TerraMatch和TerraScan等模块对载入的初始点云进行区域划分(即分割成9个田块)、游离噪点去除和点云层次初步分类等点云数据预处理步骤(图1-c下部)。
针对预处理获得的三维点云(图1-d上部),使用spatial.cKDTree函数对单个田块点云建立索引,将漂浮于主要点云周边且大于最大噪点判定距离[19]的点,使用公式Avd.+k*Std. (式中,某一空间点与其相邻点之间的平均距离为Avd.,其标准差为Std.,扫描距离倍数为k)判定为离群点。通过判定离群点定义三维噪点,去除后完成降噪处理[14]。然后,使用height_above_ground函数对去噪点云进行滤波,将不平整的地面点云归一化,得到接近真实田间小麦生长的三维点云文件。为方便对小区点云的批量分割,本研究特别将点云文件从三维转换成二维栅格(raster)数据,以此生成冠层高度模型(canopy height model,CHM)。在设置好栅格模型分辨率等参数后,通过lidar_tin_gridding函数生成每个田块的CHM,并完成数据预处理流程(图1-d下部)。
1.5 点云的分割和校准算法设计
基于预处理获取的点云数据,设计了一种半自动化的点云分割、校准和性状提取流程(图2-a),包括:小区点云分割及重新定位、基于小区的点云分类、方向校准和冠层性状提取等步骤。首先,根据CHM转换为地理坐标,完成小区范围内的点云分割;其次,使用Harris等[20]的角点检测,自动化获取小区点云的4个顶点;最后,对CHM的方向校准,以便后续的自动化性状分析。在处理过程中,因为点云初步分类与田间实际情况存在偏差,算法还增加了点云分类修正环节。

图2 基于背包式激光雷达生成的大田尺度冠层高度模型(CHM)对小区作物点云分割及校准的算法流程Fig.2 The algorithmic workflow of plot-based segmentation and 3D point clouds calibration based on field-level canopy height model(CHM)acquired by the backpack LiDAR
1.5.1 大田点云分割为减少重复获取小区尺度的地理坐标,本算法结合三维点云与CHM完成了对大田尺度的三维点云的小区分割:首先,使用Gaussian函数对代表田块的CHM进行高斯滤波,在模糊小区细节的基础上,减少细节对小区轮廓检测的干扰;其次,使用threshold_sauvola函数初步将地面和非地面区域分开(图2-b上部),以此绘制田块中各个小区的边缘轮廓;最后,使用hough_line函数[21](设置检测角度间隔90°,图2-b),通过直线检测小区边缘。
1.5.2 修正错误边界小区边缘检测中会出现一些错误,如检测直线过多、直线斜率错误和部分边界缺失等(图2-c)。需通过算法改进检测结果:1)针对检测直线过多问题,以间距阈值(即相邻2行或2列间隔的0.75倍)为筛选条件,删除小于此阈值的小区行列线;2)针对直线斜率错误问题,计算所有检测直线斜率的中位数,以此删除错误检测线;3)针对部分直线无法检测问题(如图2-b红色圆圈位置),取最接近的直线坐标,以间距阈值分析空缺直线的代表坐标点,再结合行(列)斜率补充缺失直线和最边缘直线。
1.5.3 分割小区点云完整获取小区边界后(图2-d上部),利用小区行(列)线提取各小区的4个顶点坐标(图2-d下部)。算法使用transform函数获取仿射变换(affine transformation)矩阵,将这些顶点的像素坐标(pixel-based coordinates)转换为对应地理坐标(geographic coordinates)。算法批量输出与各小区顶点的地理坐标对应的Shapefile文件,即ESRI Shapefile,最后使用clip_lidar_to_polygon函数完成对田块中每个小区的三维点云的分割和保存。
1.5.4 小区点云的方向校准分割各小区点云后,自动校准小区CHM的方向,以便后续自动化性状处理。首先使用cornerHarris函数提取出小区图像的拐点,结合图像边缘值筛选出4个顶点(图2-e);然后使用getPerspectiveTransform函数对图像进行二维透视变换,通过迭代完成对象田块内所有54个小麦小区的方向校准。
1.6 小区点云的重分类
基于小区的三维点云会存在分类异常情况,例如由于植物遮掩或采集数据时的气候情况,某些小区中间部分会呈现出点云凹陷或密度不均等问题。基于这些异常小区完成的冠层性状分析(如高度或冠层结构)会出现与实际数据偏差较大的情况。因此,针对小区点云分类偏差构建了分类修正算法(图3-a),包括分类三维点云、矫正点云分类、修正点云和批量处理等步骤。
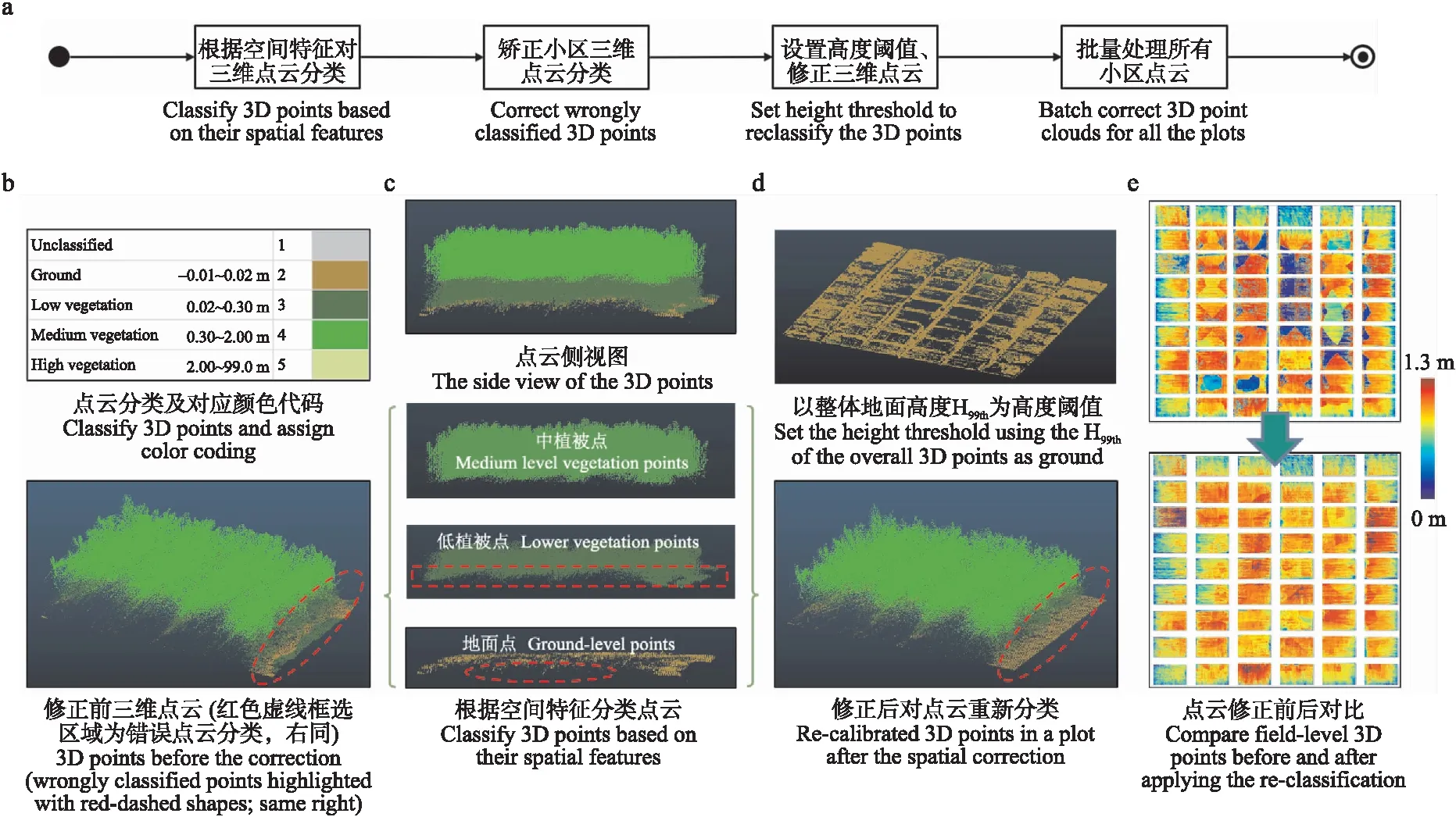
图3 通过小区作物空间特征分析完成小麦作物的三维点云分类重校准Fig.3 The re-classification of 3D point clouds based on wheat plants’ spatial features at the plot level
1.6.1 点云分类错误在预处理过程中,TerraSolid会对某些三维点云错误分类,其原因包括点云稀疏或小区中心区域三维空间点较少,造成地面点云部分过少。因此,滤波处理会将冠层部分点云沉降并误分类为地面点。此外,由于地面起伏,一些接近地面部分的小麦点云也会被误分类为地面点(ground level points),一些地面点云也会被分类为低植被点(low vegetation points,图3-b)。
1.6.2 修正三维点云为保证性状分析的准确性,构建了自动化流程,完成对去噪后小区三维点云重新校准分类,包括:1)按照TerraSolid预处理的分类,即未分类点(unclassified)、地面点(ground)、低植被点(low vegetation)、中植被点(medium vegetation)和高植被点(high vegetation),将点云重新进行归类;2)根据点云的空间特征信息,查找错误分类(即小麦最高高度约为1.5 m,因此可去除高植被点分类;中植被点一般正确;低植被点、地面点和未分类点需重新归类,图3-c);3)根据小麦各阶段高度设置阈值,对低植被点和地面点重新划定分类,即基于大田的平均地面高度统一划定该田块内的地面高度阈值,在比较不同时期地面高度后,使用大于99%地面三维点的高度为阈值(H99th),将地面点和植被点重新划分(图3-d);4)完成地面点分类后,对未分类点、地面点和低植被点重新进行归类,即低于阈值的三维点为地面点,高于阈值的为低植被点;5)以此流程,基于小区对所有小麦点云进行批量修正,完成滤波处理和CHM提取(图3-e)。利用俯视图对小区点云切割后,小麦冠层会遮挡住冠层或高植被点下方的三维点云,因此对小区切割时都会保存小麦下部点云(即低植被点)或地面点,以保证修正三维点云。此外,大田中部小麦冠层下方点云稀少并不会影响后续基于冠层的性状分析结果。
1.7 基于冠层的形态性状分析
对校正后的点云和对应的CHM可提取冠层性状,如作物高度(crop height)、冠层覆盖度(canopy coverage)、三维冠层表面积(3D canopy surface area)和三维冠层指数(3D canopy index,3DCI)[17]。对于作物冠层高度,本研究选取了大于小区90%高度的三维点[22-23](H90th),并将这些三维点的高度平均值作为小区冠层平均高度,以减少小区植株高度差异造成的误差(图4-a、b)。对于冠层性状,以最高高度的60%为阈值高度提取冠层部分点云(图4-c);然后基于冠层点云俯视图(图4-d),使用threshold_local函数得到对应小区冠层区域的二值图(图4-g),以此计算小区尺度的覆盖度(0~1,其值越接近1,表明小区冠层覆盖度越高)。对3DCI性状的计算,通过二维傅里叶变换[24](discrete Fourier transform,DFT)将获取的小区图像转换成频域(频谱图),并将零频率分量移至频谱中心(图4-e)。然后,使用高斯拟合对频谱图中高度值的频率和振幅进行拟合并绘制曲线(图4-h),使用trapz函数获取曲线下面积,归一化处理后获得3DCI。如图4-h所示,‘宁麦13’在3种氮素处理下的3DCI曲线差异明显,表明3DCI值越小,冠层越密集植株高度差异越小,反之则植株高度及冠层结构差异大。
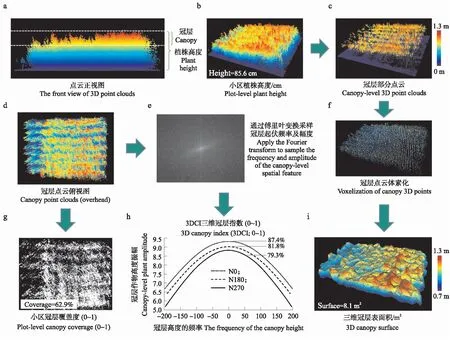
图4 基于小区的小麦关键生长性状分析算法流程Fig.4 The algorithmic workflow of key growth-related traits of wheat measured at the plot level
对于三维冠层表面积性状,使用voxel_down_sample函数对冠层点云进行体素化处理(图4-f),降低点云密度后完成关键三维空间点的标定;再使用creat_from_point_cloud_alpha_shape函数重建冠层三角网格模型(图4-i);最后使用get_surface_area函数得到小区内小麦冠层的三维表面积。由于不同小区点云数量的不同,点云稀少的小区冠层模型会出现不完整情况,所以通过式(1)计算了三维冠层表面积。
(1)
式中:SCS表示三维冠层表面积性状;SCM表示体素化后冠层模型的表面积;SP表示小区面积;k为不完整的冠层模型表面积系数,其取值范围为0.6~0.7(即接近1个标准差的范围)。
1.8 人工检测和算法评估
人工数据集(ground truth data)由2部分组成:1)通过人工统计获取田间不同品种的株高、单位面积穗数(SN m-2)和单位面积产量。对田间获取的人工数据采取标准化处理,包括:交叉计算、历史数据验证和截尾均值去除离群值;2)使用ImageJ软件测量小区的冠层高度和冠层覆盖度等。将算法获取的作物高度、冠层覆盖度、三维冠层表面积和3DCI等性状与人工统计的产量和冠层性状数据进行相关性分析,使用决定系数R2、均方根误差(root mean square error,RMSE)和P值等综合评价算法获取性状的可靠性。
2 结果与分析
2.1 冠层性状的变化及与人工数据的量化分析
2.1.1 冠层性状的动态变化及产量分级的关键时期通过7个时间点的4个冠层性状(即作物高度、冠层覆盖度、三维冠层表面积和3DCI),分析了从拔节到灌浆后期(播种后150~197 d;day after sowing,DAS)54个小麦品种的冠层性状变化过程(图5-a)。在3种氮素处理下,冠层性状变化趋势相似:作物高度和冠层覆盖度呈上升趋势,在185 DAS到达最高值;三维冠层表面积和3DCI持续增加,在185 DAS后上升变缓。4个目标性状在高氮(270 kg·hm-2,N270)和中氮(180 kg·hm-2,N180)处理的变化曲线接近,与低氮处理(0 kg·hm-2,N0)的表型变化差异较大。
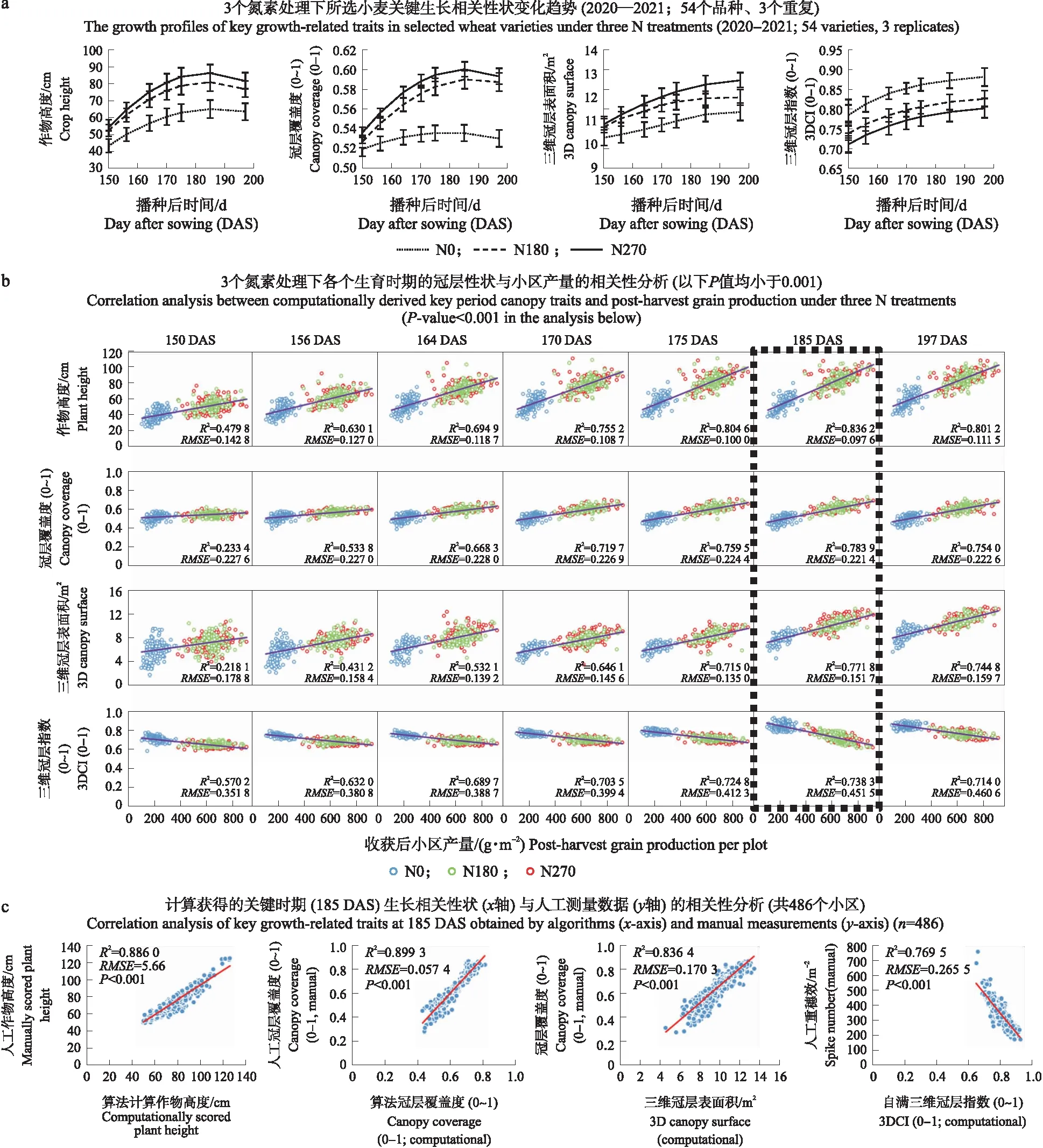
图5 各生长相关性状变化曲线及其关键采样时期与小区产量及人工测量数据的相关性分析Fig.5 The curves of key growth-related traits and their key sampling date together with the correlation analysis between these traits and grain production as well as manual measurements
为了确定与最终产量相关性较高的关键生育时期,以完成产量分级,将人工测量的小区产量与各生育时期的冠层性状进行线性回归分析,用R2来评估关键生育时期与小区产量的相关性(图5-b)。拔节期(150 DAS)小麦生长迅速,不同品种间冠层结构差异较大,造成大部分小区三维冠层表面积较小,部分品种的三维冠层表面积较大。所以,该阶段的三维冠层表面积数据分布较为分散(图5-b;第3行,150 DAS)。此后的生育阶段,小麦冠层逐渐紧密且结构差异降低,三维冠层表面积数据分布逐渐紧密(图5-b;第3行,170~197 DAS)。人工测量的单位面积产量与4个冠层性状的相关性均在185 DAS(灌浆期,其中N0处理的小麦处于灌浆中后期,N180、N270处理的小麦处于灌浆中期;图5-b中红色虚线框)达到最大值,包括冠层高度(R2=0.836 2,RMSE=0.097 6)、冠层覆盖度(R2=0.783 9,RMSE=0.221 4)、三维冠层表面积(R2=0.771 8,RMSE=0.151 7)和3DCI(R2=0.738 3,RMSE=0.451 5),且所有P值小于0.001。所以,灌浆期被用于在田间判定产量等级的关键生育时期。
此外,为了解不同氮素处理的产量差异,以此量化分析高产小麦的冠层性状特征。本研究还以不同颜色的散点对不同氮素处理的小麦单位面积产量进行划分:低氮处理(蓝色散点)的小麦单位面积产量较低,且与中、高氮处理基本没有交集;中氮(绿色散点)和高氮处理(红色散点)的单位面积产量分布类似,因此选择将中、高氮处理的小麦品种合并,以此进行后续的高产性状分类研究。
2.1.2 关键生育时期生长性状与人工数据对比在进行产量分级前,为了确保算法计算小麦冠层性状的可靠性,在185 DAS选取算法获取的4个冠层性状与人工测量数据进行线性回归分析(图5-c):算法得出的作物高度和人工测量数据的决定系数R2为0.866(RMSE=5.66 cm,P<0.001),算法得出的冠层覆盖度和人工测量数据的R2为0.899 3(RMSE=0.057 4,P<0.001),算法得出的三维冠层表面积和人工测量数据的R2为0.836 4(RMSE=0.170 3,P<0.001),算法得出的3DCI和人工测量穗数的R2为0.769 5(RMSE=0.265 5,P<0.001)。相关性分析表明,本研究提出的算法分析获得的冠层性状与人工测量的性状和产量数据均具有显著相关性,因此能用于量化描述分蘖期后不同时期小麦冠层性状和不同品种的产量差异。
2.2 不同小麦品种的冠层性状差异
2.2.1 基于产量分级的小麦性状差异根据小麦冠层性状和单位面积产量在N180和N270处理下相似度高的特点(图5-a、b),将N180和N270处理合并后对54个小麦品种完成了产量分级(图6-a)。首先,根据曹寒冰等[25]通过人工统计的单位面积产量,将小麦品种划分为3个产量等级,基于箱线图也对产量进行了3个等级的划分:Ⅰ级(红色,>75%,共14个品种)、Ⅱ级(绿色,25%~75%,27个品种)、Ⅲ级(蓝色,<25%,12个品种,1个离散点)。其次,基于3个产量等级,通过雷达图对比了其所属品种在185 DAS时的冠层性状差异(图6-b):作物高度分布范围为75~95 cm,冠层覆盖度分布范围为0.55~0.65,三维冠层表面积分布范围为9~11 m2,3DCI分布范围为0.65~0.75。以上结合不同产量等级对性状差异进行分析,可更好了解不同品种产量分布情况,为了解影响产量的关键因素提供支撑。其中,产量Ⅰ级(代表高产小麦品种)的高度、覆盖度和冠层表面积数值较大,3DCI较小(即小麦冠层紧密且三维结构差异小);产量Ⅱ级的品种4个冠层性状数值对比其他2个等级适中;产量Ⅲ级(代表相对低产品种)的高度、覆盖度和冠层表面积数值较小,3DCI较大(即小麦冠层松散且高度差异较大)。
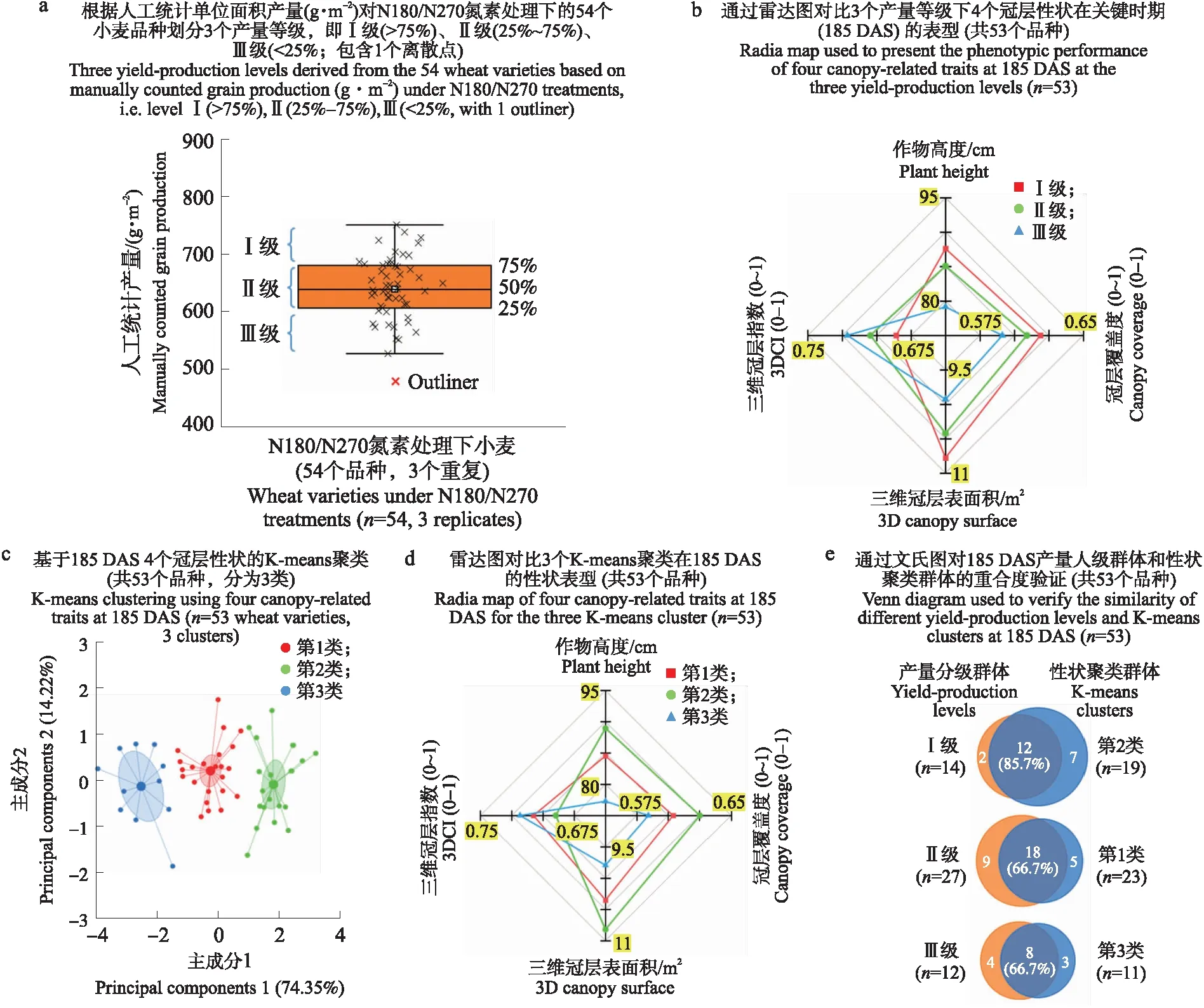
图6 根据产量分级和性状聚类分析对N180/N270氮素处理下53个品种的4个冠层性状的综合分析Fig.6 A comprehensive comparison of canopy-related traits under N180/N270 N treatments according to clusters of 53 wheat varieties’ yield-production levels and four canopy-level traits
2.2.2 基于冠层性状聚类的小麦性状差异除了基于产量分级解析性状差异,本研究还利用各品种小麦在185 DAS时的4个冠层性状,使用K-means完成了聚类分析。根据性状差异将53个小麦品种(同2.2.1节类似,去除了1个离散品种)分为3类:第1类群体有23个品种;第2类群体有19个品种;第3类群体有11个品种(图6-c)。聚类分析中PC1(principal components)的贡献率为74.35%,主要包括作物高度(特征值为0.52)、冠层覆盖度(特征值为0.50)和三维冠层表面积(特征值为0.54);PC2的贡献率为14.22%。根据聚类获得的3个性状分类(红、绿、蓝色,图6-d),其高度、冠层覆盖度、三维冠层表面积和3DCI的分布特征和范围与基于产量分级获得的雷达图高度相似。
2.2.3 产量分级品种和性状聚类品种的对比由于通过产量分级和性状聚类获取的冠层性状特征分布具有很高的相似性,进一步对比了产量Ⅰ级(红色;高产小麦)对应品种与性状聚类第2类(绿色)对应小麦品种。结果(表1)显示,2种分类对应的品种重合度为85.7%(12个品种),基本包含了在中、高氮处理下产量表现较优异的已发表的小麦品种[26-27]。其余2类对应的品种重合度也达到了66.7%(图6-e)。综上所述,在关键生育时期通过激光雷达获取的三维点云分析冠层性状,再使用具有高产特征的表型组(图6-b、d)能够完成对不同小麦品种的田间产量分级,该方法具有很强的可行性和可操作性。

表1 在185 DAS时产量分级和性状聚类对应的相同品种Table 1 Same wheat varieties identified by yield-classification and trait clustering at 185 DAS
3 结论
1)利用背包式激光雷达在田间试验中采集了不同生育时期的54个小麦品种(3个重复)的三维点云,基于前人研究研发了大田点云矫正、精准小区点云分割、修正和提取冠层区域点云等三维点云分析流程,在小区尺度对不同小麦品种的多个冠层性状进行了基于时序的分析。该表型分析流程通过精准分割小区点云和点云重分类,减少了田间地形和点云稀疏对自动化提取冠层性状的影响。在批量使用前,本研究提出的方法经过对比筛选(如基于聚类或密度的去噪算法、基于坡度或插值的滤波算法等),能够更简单、高效地完成三维点云处理与冠层性状分析,与其他算法获得的结果对比后获得更接近田间真实情况的分析结果。但是由于数据预处理和小区边界检测仍需人工介入,后续研究将进一步对这两方面作出改进,以期构建针对关键小麦冠层性状的大规模、自动化提取平台。
2)对所试小麦品种完成了从拔节到灌浆后期的冠层性状分析,即在3种氮素处理下作物高度、冠层覆盖度、三维冠层表面积和3DCI的变化趋势。结果表明,灌浆期(185 DAS)的单位面积产量与4个冠层性状的相关性达到最大值,因此该时期可作为在田间对不同小麦品种进行产量分级的关键生育时期。本研究中使用的小麦品种较多,品种间生育时期存在差异,而且灌浆期各阶段对预测小麦产量的影响不同(灌浆初期判断小麦的产量潜力,灌浆中期估计小麦的产量情况,灌浆后期观察小麦的产量表现)[28]。后续研究将综合使用灌浆期不同阶段的观察结果,更全面评估小麦产量。通过对冠层性状与人工测量数据的线性回归分析,算法获得的冠层性状与人工测量数据具有显著相关性,验证了本研究构建的性状分析算法的可靠性。然而,本方法的特征提取精度和应用场景仍有提升和扩展的空间,特别是针对其他谷类作物的测试仍处在尝试阶段,后续研究将在本研究的分析流程上进行改进。
3)通过产量分级和性状聚类获取的冠层性状特征有很高的相似性。例如,产量Ⅰ级(即高产品种)与第2类(性状聚类)对应的品种重合度为85.7%;2类对应品种的高度、覆盖度和冠层表面积较大,3DCI较小(即小麦冠层紧密且三维结构差异小),具有明显的高产性状特征。结果证明,基于背包式激光雷达采集并分析三维冠层性状,在关键生育时期对不同小麦品种进行产量分级具有一定的可行性和可操作性。
4)在关键生育时期对小麦产量分级能为遗传育种中大规模鉴选优质高产小麦基因型,进而解析作物在不同环境下产量的形成规律、降低高产性状分析难度以及为品种选育提供量化依据。在实际栽培和农业生产中,精确预测产量也可为田间动态改进栽培措施、精准准备收获期的各项工作(如农机、货运和仓储安排等)提供依据。特别是本研究提出的基于三维冠层性状的分级方法能在作物生殖生长(reproductive phase)早期构建不同品种的产量等级划分,在小麦遗传育种、精准栽培和农业生产中均有较大的应用价值。
猜你喜欢
北京测绘(2022年5期)2022-11-22 06:57:43
中国农业信息(2022年1期)2022-05-25 13:31:46
农业机械学报(2021年11期)2021-12-07 05:36:44
汽车观察(2021年8期)2021-09-01 10:12:41
大气科学(2021年1期)2021-04-16 07:34:18
中国交通信息化(2019年1期)2019-03-26 06:43:46
电子制作(2018年16期)2018-09-26 03:27:00
现代园艺(2017年21期)2018-01-03 06:41:32
农业环境科学学报(2017年2期)2017-03-20 14:57:37
中国康复理论与实践(2015年10期)2015-12-24 05:42:44