
基于卷积自编码器的风电机组变桨轴承故障预警与定位
2023-11-24 09:27江国乾白佳荣李文悦
可再生能源 2023年11期
江国乾,白佳荣,李文悦,何 群,谢 平
(燕山大学 电气工程学院,河北 秦皇岛 066004)
0 引言
风电机组作为风力发电的重要装备,其结构包含叶片转子系统、变桨系统、传动系统和发电系统等多个子系统[1]。其中变桨系统是风电机组控制和保护的重要执行装置,对机组安全、稳定、高效运行具有十分重要的作用[2]。据统计,变桨系统故障比例高达21.29%,造成机组停机时间的占比高达23.32%[3]。因此,研究准确可靠的变桨系统故障预警与诊断方法,对提高机组运行可靠性,降低故障发生率和运行维护成本具有重大意义。
针对变桨系统故障诊断的研究可以分为基于模型的方法和数据驱动方法[4]。其中,基于模型的方法主要通过建立变桨系统的物理或数学模型,计算参考模型和实际模型的差值来判断变桨系统是否发生故障[5],[6]。该方法对系统模型机理和物理特性要求较高,难以建模复杂的实际运行工况,存在较大的应用局限。数据驱动方法主要利用机组的历史运行数据,通过统计学习和机器学习等方法从数据中自动挖掘和建模其内在结构特征和关联关系[7]。数据采集与监控(SCADA)系统作为机组预装系统,用于监测机组及其关键部件的运行性能和健康状况,提供了全面的状态信息、历史报警记录和故障日志[8]。因此,基于SCADA数据的变桨系统故障诊断已成为当前的研究热点。文献[9]基于相似性原理,利用非线性状态评估方法,建立能够涵盖变桨系统全部正常运行状态的健康模型。文献[10]以实际运行的SCADA系统数据为基础,提出了基于深度学习的风电机组变桨系统故障诊断算法。文献[11]提出了一种变桨系统变频器的故障预警模型,在建立的模型及滑动时间窗残差估计方法的基础上能及时对变浆系统变频器的潜在故障做出预警。以上研究主要关注变桨系统故障传感器和执行器故障的预警和检测,对变桨轴承故障的研究较少。
为了建模不同特征变量之间的空间相关性,本文以变桨轴承为研究对象,提出了基于卷积自编码器(XAE)网络的故障预警与定位方法。通过对多个特征变量进行编码和解码重构,实现了对不同变量间内在相关性的有效建模。同时,考虑到机组的变工况运行特性和变桨系统的运行控制特点,在不同的控制阶段,变桨系统各特征参数间的关系也不同。因此,选取恒功率工况下的SCADA数据进行建模分析,以便更有效地挖掘变桨系统工作状态下的故障特征。最后通过某风电场1.5 MW并网直驱风电机组的SCADA数据验证了所提方法的有效性。
1 变桨系统运行工况特性分析
以变桨距风电机组为研究对象,依据风速大小,变桨系统的变桨过程分为4个阶段(图1)。阶段I风速为0到切入风速之间,此时叶片顺桨进入待风工作状态,机组不发电。阶段II风速处于切入风速到额定风速之间。随着风速变化,机组逐渐接入电网,发电机转速稳步上升。当风速达到额定风速时,机组发电功率达到额定功率。该阶段桨叶角度全开,最大限度捕获风能。阶段III风速处于额定风速到切出风速之间,即恒功率阶段。该阶段机组的桨距角自动调节,维持机组输出功率接近额定值,防止发电机和逆变系统过载,保证机组安全稳定运行,变桨系统处于工作状态。阶段IV风速大于切出风速,叶片收桨,变桨系统停止工作,发电机脱网,机组制动器制动并停止发电。
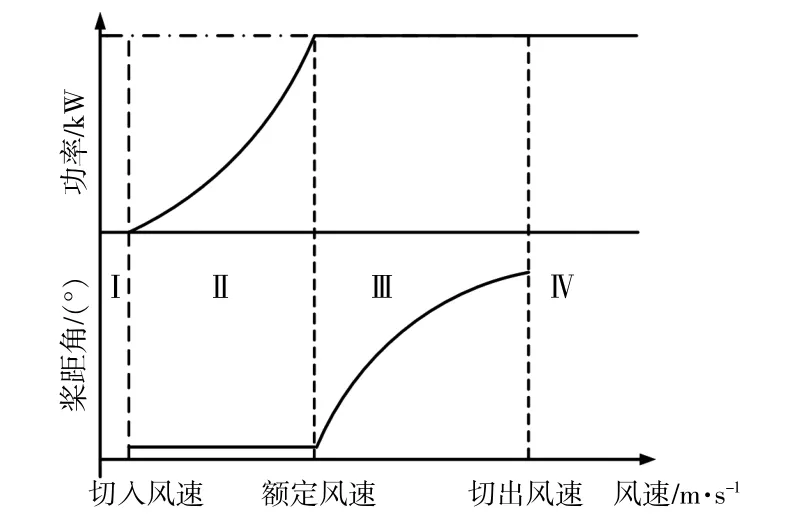
图1 风电机组变桨系统控制运行阶段Fig.1 Operational regions of wind turbine pitch systems
变桨系统主要工作在恒功率阶段,为此选择该阶段的数据进行建模分析。变桨系统的全工况由阶段II和阶段III组成。
2 研究框架
针对风电机组变桨系统的多工况运行特点及不同特征参量的相关性,本文提出的一种基于卷积自编码器网络的变桨轴承故障预警与定位模型框架如图2所示。

图2 变桨轴承故障预警与定位模型框架Fig.2 The proposed model framework of fault warning and location model for wind turbine pitch bearings
主要针对恒功率工况下的特征变量进行建模分析,包括离线建模和在线监测两部分。离线建模阶段对机组历史健康数据建模并确定模型阈值;在线监测阶段则根据重构残差与阈值的关系分析在线数据,确定故障发生情况,并利用余弦相似性和差异性函数对故障点位前后的训练集重构残差与测试集重构残差进行分析,以确定故障位置。
2.1 特征变量筛选与数据预处理
筛选与变桨系统是在物理或位置上存在一定关系的特征变量使用随机森林方法对特征重要性进行排序[12],选取重要特征进行建模。数据预处理包括缺失值的添补、异常点的剔除和归一化。为保持数据的连续性,缺失值采用邻值法填写;根据机组运行原理,剔除负功率点、负转速、负风速的异常数据点,依据切入风速和切出风速对数据进行过滤,筛选功率值大于10 kW的数据;考虑不同监测变量间的量纲差异,利用Z-score方法对所有训练样本进行归一化处理。
2.2 基于CAE的故障预警与定位
为捕获与变桨系统相关特征变量之间的空间相关性,本文提出的基于卷积自编码网络的状态监测模型旨在学习和捕获数据内在的结构关系特征,实现对正常运行数据的准确建模。该模型无需故障标签数据,能够利用大量的机组正常运行数据建立健康行为模型。正常状态下,不同特征变量间存在的关系相对稳定,其重构残差较小;当发生变桨轴承故障时,变量间的关系会发生变化,其重构残差会变大,偏离健康行为模型。因此,基于模型重构残差构建健康监测指标,通过观察监测指标的变化,便可以判断故障是否发生,从而实现故障预警与定位。
2.2.1 CAE网络
CAE网络由编码器和解码器组成,其组成单元为一维卷积和一维反卷积神经网络,模型结构如图3所示。
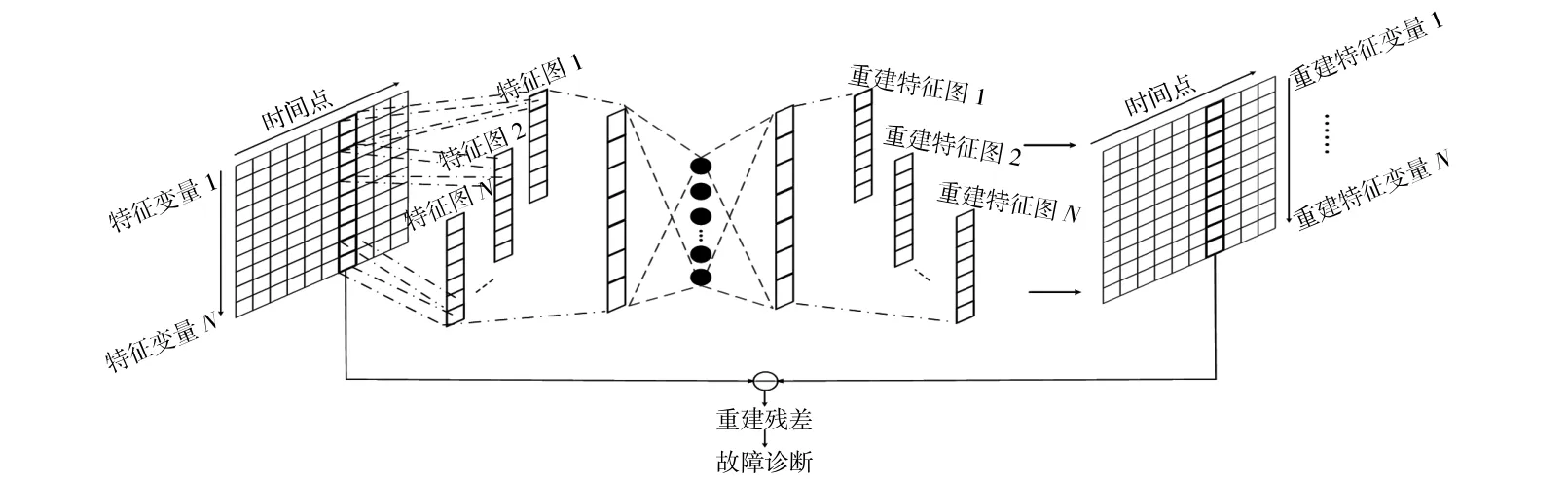
图3 基于CAE的故障诊断模型结构Fig.3 Structure of fault diagnosis model based on CAE
编码结构是将输入数据X=[x1,x2,...,xn]T经过卷积层的编码生成特征图。初始化k个卷积核,每个卷积核由参数wk和bk组成,生成k个特征图h。
式中:w为输入层到卷积层的权重;b为卷积层的偏置;σ为ReLU激活函数。
特征图通过级联的方式进行拼接,生成中间层。
解码结构是将得到的中间层经过一维反卷积层进行重构,得到重构输出。
式中:w^为中间层到反卷积层的权重;b^为反卷积层的偏置。
2.2.2故障预警策略构建
对SCADA数据与用于建模的多个特征变量进行分析,当多个特征变量作为输入时,模型将有多个特征变量的重构输出。首先利用平均绝对误差(MAE)计算特征变量重构输出与输入的残差值;然后选择每个点中特征变量残差值的最大值,即选择每个点中对故障最敏感的特征变量来构建模型的监测指标(HI)。
式中:m为特征变量的个数;i=1,2,...,N,N为测试集中数据点的个数。
将训练集计算得到的HI的最大值作为模型阈值。变桨轴承故障引起的异常数据往往是连续出现的,其他原因(如环境变化、传感器测量误差)引起的异常数据往往是离散的。为避免误报和提高预警结果的可靠性,连续监测到1 h的异常数据时,认为变桨轴承处于异常状态并产生报警。
2.2.3故障位置确定
当变桨轴承故障时,特征变量在故障时间点附近会发生显著变化。利用余弦相似性函数对故障点位之前的重构残差数据进行相似度分析,剔除因数据问题带来的故障定位错误的特征变量;利用差异性函数对故障点位之后的重构残差进行差异性分析,选出在故障位点前后差异性较大的特征变量确定为故障敏感变量,其直接或间接与故障位置相关,从而进一步定位故障位置。
3 案例分析
3.1 数据描述
本文使用的SCADA数据来自某风场额定功率为1.5 MW的直驱风电机组,机组切入风速为3 m/s,切出风速为22 m/s,额定风速为11.1 m/s,故障发生时间为2020年5月20日,故障位置为2#变桨轴承。由于变桨轴承失效后,失效程度在短期内增加。案例数据记录了从2020年2月29日-4月30日,2020年5月13-20日,共59 d的数据和故障修复后的一个月数据。构建恒功率工况下训练集和测试集,其中训练集包含22 400个数据点,测试集包含28 825个数据点。故障修复后的数据集包含6 959个数据点。变桨系统全工况下的训练集包含314 364个数据点,测试集包含286 302个数据点,故障修复后全工况数据包含179 773个数据点。利用随机森林方法对特征变量进行重要性排序,所选特征变量见表1。
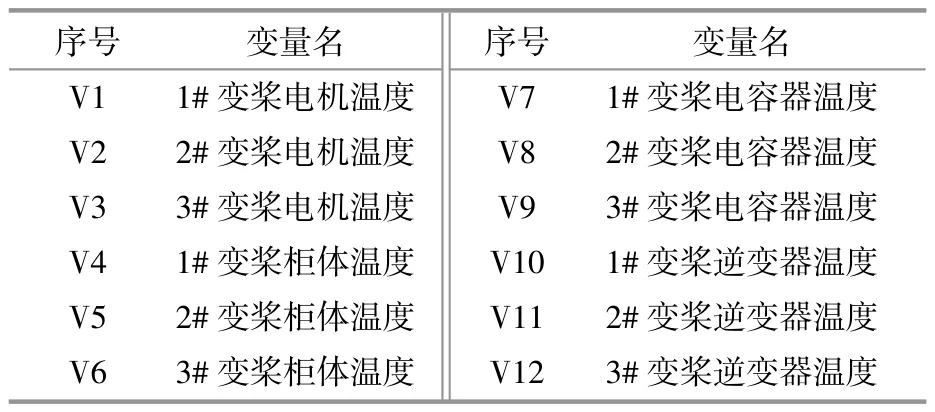
表1 SCADA特征变量Table 1 SCADA feature variable
3.2 结果分析
确定CAE的故障预警模型的网络结构,模型输入维度为12,两个一维卷积神经网络层的滤波器个数分别为16和32,卷积核数为10,卷积步长设置为2,激活函数为ReLU。两个一维反卷积神经网络层的滤波器个数分别为32和16,其他参数设置相同。将所提方法与自动编码器(AE)模型和主成分分析(PCA)模型进行对比。本文所提方法和对比模型方法的预警和评价结果分别如图4和图5所示。
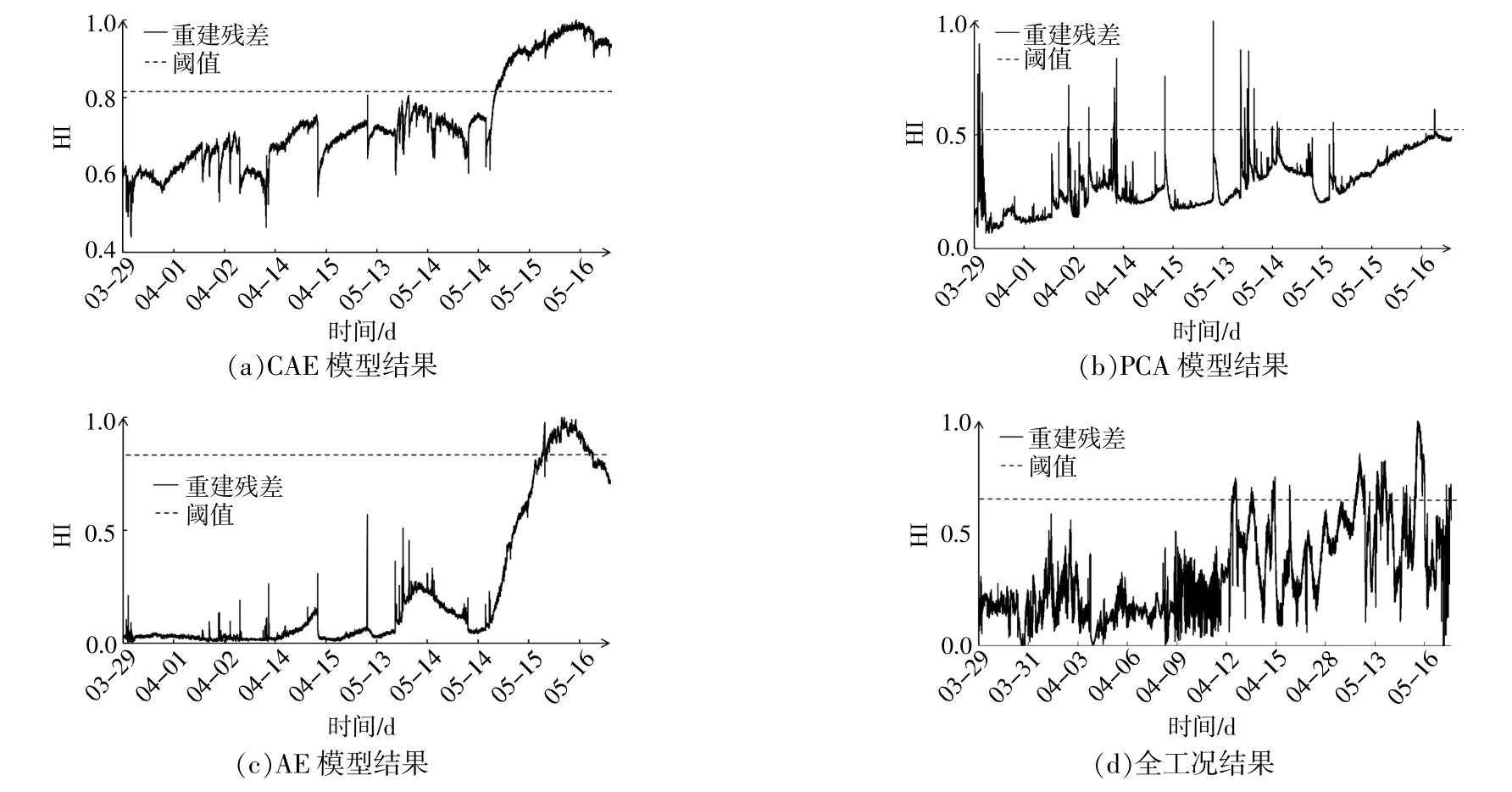
图4 不同方法的预警结果比较Fig.4 Comparison of early warning results of different methods
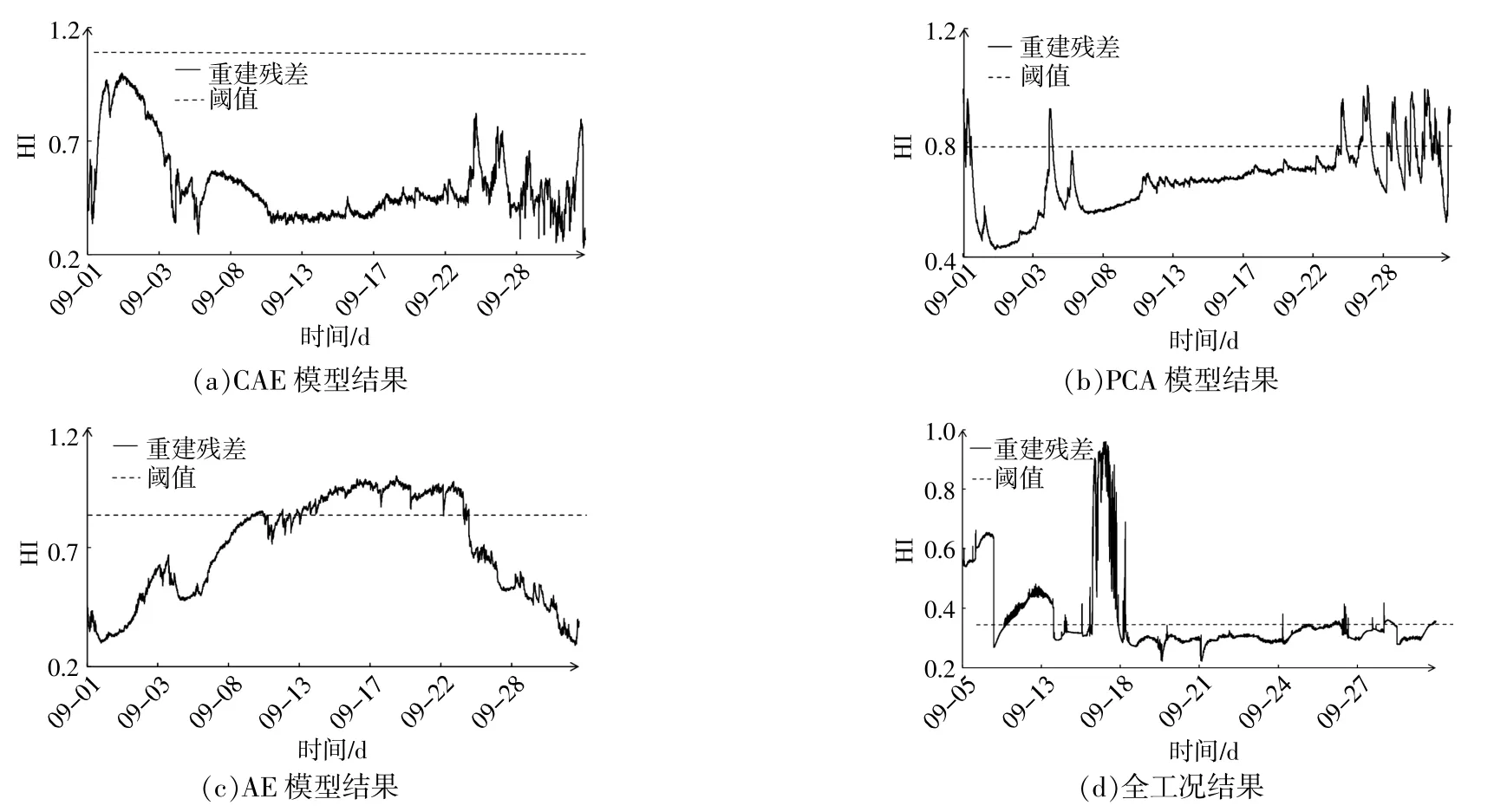
图5 不同方法的评价结果比较Fig.5 Comparison of evaluation results of different methods
由图4(a)和图5(a)可知,在第一个故障点后的所有点均大于阈值,且修复后的数据集测试中无漏报产生,本文所提模型判断故障发生的时间为2020年5月14日。可以确定所提模型能够提前6~7 d发出故障预警信息。
由图4(b)和图5(b)可知,PCA模型的结果较差,故障检测率低,且存在多处误报,从结果中看不到故障发生的趋势,模型预警效果较差。
由图4(c)和图5(c)可知,AE模型的故障检测性能较PCA有明显的改善,但后期存在漏报和误报的情况。因此,AE模型能够在一定程度上捕获空间特征中的故障信息,但由于浅层网络模型能力有限,模型无法达到更好的性能。
CAE模型能够充分利用卷积网络的特性,同时兼顾自编码器网络对特征的去冗余性的优点,能够从原始数据中更好地捕获故障特征,可以更好地学习到空间维度上的故障信息。相比于PCA和AE方法,所提方法取得了最优预警性能,不存在误报和漏报的情况,故障预警结果更可靠。
为验证恒功率工况分析变桨轴承故障问题的有效性,将全工况与恒功率工况进行比较,模型参数设置与3.2.1节相同。由图4(d)和图5(d)可知,基于全工况数据分析的方法虽然故障预警时间较为提前,但故障检测率较低,监测指标不能很好地反映故障发生的趋势,而且正常数据下故障误报率较高。该结果证明了分工况监测的必要性。
3.3 故障定位
根据特征变量的对称性,分组使用余弦相似性函数分别计算训练集残差与测试集残差中特征变量的对称性,以此找到在故障预警点之后特征变量对称性被破坏的特征变量组。同一组变量内两个特征变量之间的余弦相似性计算式为
式中:k=1,2,...,K,K为训练集或测试集中数据点的个数;为同组特征变量,且i≠j。
以第一组特征变量中V1的余弦相似性值计算为例,其计算过程如下:首先,计算训练集残差中V1与V2,V1与V3的余弦相似性值,并将二者的平均值作为最终结果[图6(a)中V1],其计算结果为0.87;最后,将同样的计算方式应用于测试集残差中[图6(b)中V1],V1的余弦相似性计算结果为0.92。同理,可以计算其他特征变量的余弦相似性(图6)。
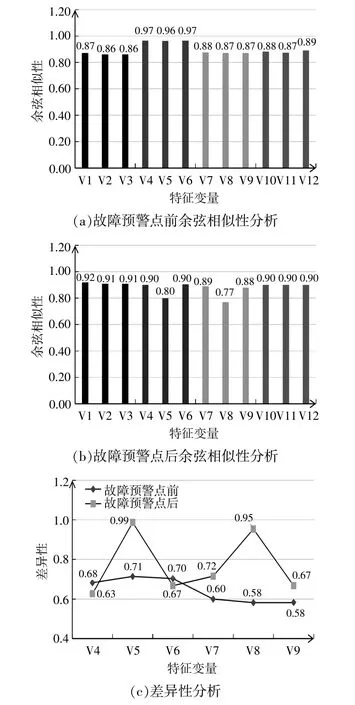
图6 故障定位分析结果Fig.6 Fault location analysis result
由图6可知:在故障预警点之前,同组特征变量的余弦相似性值的差异不超过0.02,存在相对对称性;在故障预警点之后,特征变量V5和V8的余弦相似性均明显低于同组的特征变量,第二组和第三组特征变量的对称性被破坏,初步确定对故障敏感的特征变量组为第二、三组,之后对其进行进一步分析。
进一步利用差异性函数实现对故障敏感的特征变量以及特征变量所处位置的分析,分别计算对故障敏感的特征变量组的训练集和测试集的重构值与原始值的差异性,以此来判断在故障预警点前后特征变量的差异,差异性函数计算如下:
式中:X为原始值;Y为重构值;ded为欧氏距离计算,根据差异性函数定义,规定在故障预警点位前后差异值大于0.2时,认为在故障预警点位前后特征变量有较大变化。
差异性函数计算结果见图6(c)。在故障预警点前后,特征变量V5和V8的差异性结果分别为0.27和0.37,均大于0.2,而其余特征变量的差异性结果均小于0.2,无明显变化。因此,可以确定V5和V8为故障敏感特征变量,均与2#变桨轴承有很强的物理或位置关系。因此,判断故障位置为2#变桨轴承,分析结果与实际情况一致。
4 结论
本文提出了一种恒功率工况下基于CAE的变桨轴承故障预警与定位方法。选取恒功率工况下的SCADA相关特征变量进行建模,通过CAE实现对不同特征变量间空间相关性的提取与分析,通过余弦相似性函数和差异性函数分析模型重构残差实现故障的早期预警和定位。通过风电场真实案例验证分析,得出以下结论。
①相比AE和PCA方法,所提CAE模型可以在不产生误报的情况下对故障进行提前预警,取得了较低的故障误报以及更为可靠的故障检测和预警性能。
②恒功率工况下预警准确性、故障检测率和故障误报率均明显好于全工况,证明了分工况监测的有效性。
③利用余弦相似性函数和差异性函数选出了对故障敏感的特征变量,对故障位置进行了初步判断。
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
今日农业(2019年12期)2019-08-13
电子制作(2019年11期)2019-07-04
大电机技术(2018年4期)2018-09-26
北京航空航天大学学报(2018年1期)2018-04-20
现代园艺(2017年22期)2018-01-19
通信电源技术(2016年1期)2016-04-16
电源技术(2016年2期)2016-02-27
火控雷达技术(2016年3期)2016-02-06
小说月刊(2014年11期)2014-04-18
