基于图像识别与边缘计算的电力作业智能安监技术研究
2023-11-21 14:13王桂林康继光向佳霓
电子设计工程 2023年22期
王桂林,康继光,向佳霓,刘 玮
(1.国网上海市电力公司,上海 200030;2.普天信息技术有限公司,北京 100080)
在电力生产中,正确的操作规程与完善的安全防护体系是保障电力运维、检修及抢修人员生命安全的重要防线。为了督促电力生产参与者依照规范履行安全生产的相关措施,电力生产场所逐步实现了摄像头、移动巡检终端等采集设备的无死角布控[1-4]。但由于这些设备所采集的图像与视频体积较大,若全部回传至电力数据云计算(Cloud Computing)中心将会占用大量的通信传输网带宽。对于摄像头等采集设备而言,由于受自身体积、重量的限制,其计算能力也相对较弱,故无法在终端完成违章行为的智能化识别。在此种场景下,边缘计算(Edge Computing,EC)技术提供了一套可行的解决方案。即电力安监部门通过部署云端服务器与摄像头等采集设备,组成边缘网络。由此既可避免终端采集设备直接与云服务器通信,同时又能规避采集设备算力不足的缺点,进而保证违章检测的效率[5-11]。
基于以上分析,该文对图像识别(Image Recognition)的相关技术进行了研究。同时,还对电力生产等复杂网络环境中图像技术在云计算体系下的边端协同部署方案进行了设计。通过合理分配计算资源,以提升电力作业智能化的安全监测效率。
1 理论基础
1.1 图像识别技术
深度学习(Deep Learning,DL)算法是当前图像识别领域使用的主流算法[12-13],图1 给出了卷积神经网络(Convolutional Neural Networks,CNN)的基本结构。在该网络中,主要包括卷积层、池化层及全连接层[14-16]。
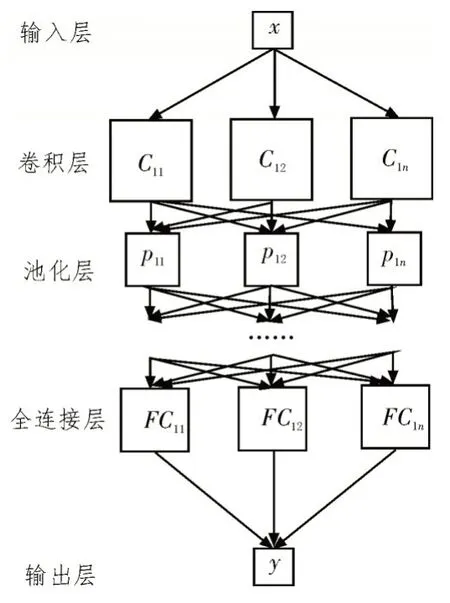
图1 CNN网络结构
在卷积层(Conv)中,使用卷积运算对输入的图像进行特征提取。记卷积层输入为尺寸m×m的图像M,卷积核则为尺寸n×n的矩阵C。当卷积步长为1时,卷积运算输出特征图矩阵F的尺寸为(m-n+1)×(m-n+1)。具体的计算表达式如下:
其中,B为偏置矩阵,Conv(·)为卷积运算,sigmoid为核函数。卷积运算的具体方式如图2 所示。

图2 卷积运算示意图
池化层(Pool)的作用在于归并特征图谱的冗余信息,并提升算法的鲁棒性,从而避免在网络训练过程中出现过拟合现象。该文主要使用了平均值池化(AverPool)和最大值池化(MaxPool)两种池化运算,具体如图3 所示。

图3 池化运算示意图
图像在经过卷积层、池化层的传递后进入全连接层。最终在该层完成对输出结果的映射:
式中,No、NG分别为全连接层的输出和输入矩阵,而WN、BN则分别为全连接层的权重和偏置矩阵。
1.2 边端调度策略算法设计
虽然深度学习网络在图像识别上效率较高,但由于其网络层数偏多,故在训练时将消耗巨大的计算资源。因此,需要将采集终端的部分计算任务分配给边缘服务器。同时,还要设计合理的边缘-采集端任务调度策略。
该策略的设计主要考虑两个方面:1)缓解采集端的计算压力;2)降低采集端到边缘服务器之间的传输时延损耗。边端系统策略示意图,如图4所示。

图4 边端系统策略示意图
从图中可看出,边端协同策略在采集端与边缘端分别部署了两个CNN 网络。其中,采集端的Little-CNN 网络结构相对简单,参数较少。其作用在于对采集到的图像进行预分类,以降低网络的传输耗时。而边缘端部署的Big-CNN 网络结构则较为复杂,参数多且训练耗时长,其作用主要是为了提升系统的识别精度。边端系统策略算法流程如图5 所示。
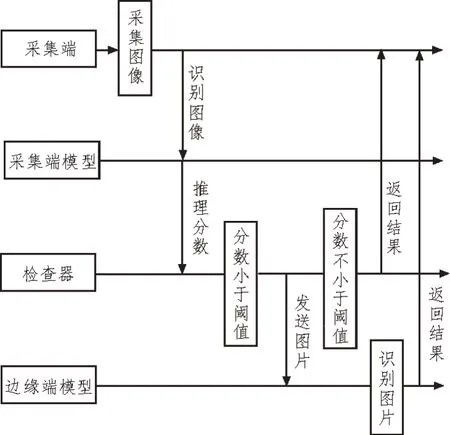
图5 边端系统策略算法流程
对于CNN 网络模型,通常在网络的输出层为输入至不同类别的置信度打分,且将置信度最大的类别判定为该输入。该文将该置信度作为边缘端对采集端模型推理效果的判别标准,即为:
由式(3)所确定的极值为阈值α,对于第i张图片的输入,定义C_collect、C_edge 分别为采集端、边缘端的第i次推理结果函数。当推理值与实际值相符时,函数值取1;而当推理值与实际值不符时,函数值则取0。此时对于第i次推理的准确率,可表示为:
边端调度系统总体识别率的计算方式,具体如下:
采集端至边缘端每次的图像传输均会增大网络的负载,根据通信传输损耗,可定义损失函数为:
其中,G(α)为第i幅图像的传输判别函数。当推理分数小于阈值α时,进行图像传输,此时G(α)=1;而当推理分数大于阈值α时,则不进行图像传输,此时G(α)=0。Delay(i)表示该图像在采集端到边缘端的传输时间。
边端调度算法需在系统识别精度与网络传输延迟间取得合理平衡,因此系统的最终优化函数为:
其中,μ是调节因子。且当μ取值较大时,系统对识别精度的要求较小,对传输速度的要求则较高;而当μ较小时,系统对精度的要求较高,对传输速度的要求则较低。LM的计算方法如下:
2 方法实现
2.1 实验设计
为了测试文中所设计的边端协同策略在图像识别上的精度,基于实际的电力生产安全监控场景进行了图像采集。并对采集图像所包含的典型电力违章行为进行了标注,进而形成了如表1所示的数据集。
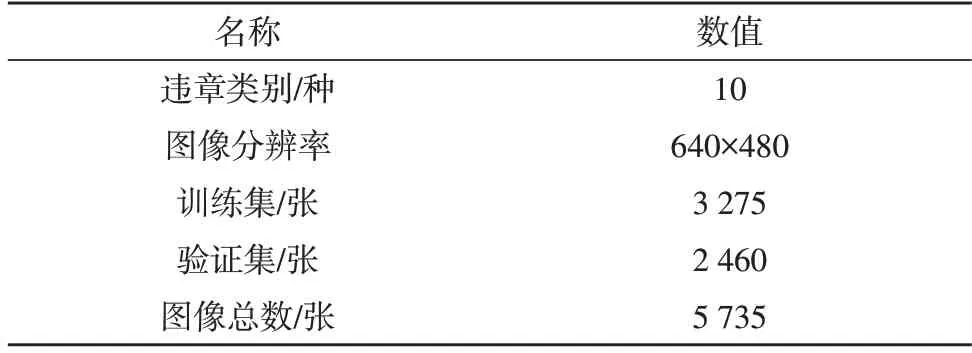
表1 数据集的参数信息
在仿真过程中,采用了基于Linux内核的Android手机来模拟视频的采集终端,并利用笔记本电脑模拟边缘服务器。相关软硬件环境如表2 所示。

表2 算法仿真软硬件环境
根据图4 可知,需分别在采集端与边缘服务器上部署Little-CNN 和Big-CNN 网络。该文设计的两种网络结构,分别如表3、4 所示。

表3 Little-CNN网络结构
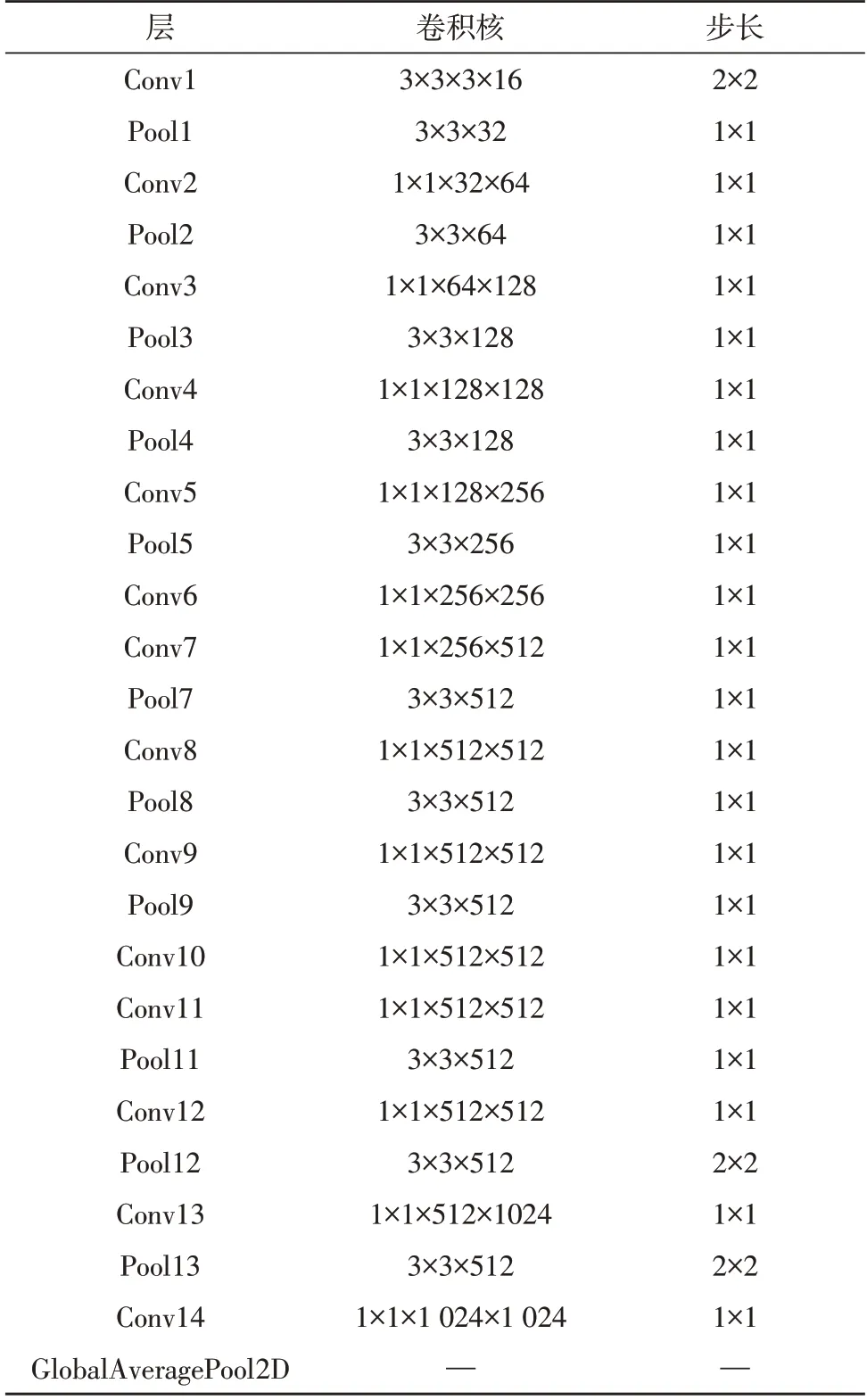
表4 Big-CNN网络结构
为了评估上文策略在实际生产环境下的可行性,需合理设计该策略的对照实验组。在设计对照实验时,不仅需要评估Little-CNN 网络、Big-CNN 网络的实际精度及运行耗时;还需要计算出图像在采集端到边缘服务器间的传输耗时。根据上述两个原则,设计了如表5 所示的部署策略。其中实验四是根据该文边端协同策略所设置的实验组,而实验一至实验三则作为该实验组的对照组。

表5 实验部署策略
2.2 系统测试结果
在评估所构建边缘计算框架的效果时,采用了模型精度、采集端计算耗时、边缘端计算耗时与网络传输时延这四个指标。根据云边协同策略,Little-CNN 网络在采集端对图像进行初始识别,而无法被识别的图像则需要通过通信网络传输给Big-CNN 网络。在进行实验前,需要合理设定因网络传输造成的Big-CNN 网络下降的阈值。
图6 给出了Big-CNN 网络中,score 函数值在不同阈值下的变化曲线,文中将Big-CNN 网络性能下降的粒度设为0.005,而此时所对应的阈值为0.950。在该条件下,得到的实验结果如表6 所示。

表6 阈值为0.950时的实验数据

图6 阈值-函数值曲线
从表中可以看出,Little-CNN 和Big-CNN 网络在进行电力作业安监识别时的准确率分别为81.35%和90.52%。由于网络规模不同,二者在采集端上的运行时间分别为4.02 ms 和87.54 ms。同时因硬件计算能力的提升,Big-CNN 网络在边缘端上的计算用时为13.25 ms。而对比实验三及实验四的数据可发现,通过实施边端调度策略,网络的传输时延由84.35 ms 下降至27.54 ms,系统的总耗时由97.60 ms下降至44.81 ms。综上所述,系统在图像识别精度下降0.15%的条件下,计算耗时与传输时延损耗下降了54.09%。由此说明该算法可显著提升系统的图像识别效率。
3 结束语
为了提升电力生产现场违章行为的检测效率,该文对电力实际生产环境下的智能安全监察技术进行了研究。并在评估现场采集终端、边缘服务的计算水平及通信传输效率的基础上,设计了边端系统策略算法。仿真结果证明,该算法可在保证图像识别精度的前提下,尽可能地降低了计算耗时与传输耗时。随着更多高清采集终端的部署,该算法将大幅降低电力通信网络的运行压力。
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
电子制作(2019年16期)2019-09-27
中国交通信息化(2019年4期)2019-07-13
电子制作(2019年11期)2019-07-04
电子制作(2018年19期)2018-11-14
电子制作(2018年14期)2018-08-21
北京航空航天大学学报(2018年1期)2018-04-20
通信产业报(2016年44期)2017-03-13
电视技术(2014年19期)2014-03-11
雕塑(1999年2期)1999-06-28